基于無人機傾斜攝影的三維數字露頭表征技術
2018-02-27 10:19:44印森林陳恭洋劉兆良馮偉劉巖
沉積學報 2018年1期
印森林,陳恭洋,劉兆良,馮偉,劉巖
長江大學錄井技術與工程研究院,湖北荊州 434023
0 引言
儲層分布模式及預測方法是儲層地質學研究的核心。隨著油田勘探開發的目標不斷精細化,砂體平面精度要求越來越高,縱向單元研究尺度越來越小[1]。因此,近年來發展了三維地震數據體切片技術[2]、密井網儲層構型層次分析法[3- 7]、水槽沉積模擬實驗[8]、Google地圖與實地(現代沉積和野外露頭)考察相結合的研究手段等[9- 10]。Posamentier等率先開始了地貌特征與垂向演化的“地震地貌學”研究[11- 12];隨后,大量學者關注了地震資料的沉積類型和巖性解釋[2,13]。在地震分辨率難于滿足解釋精度需要時,儲層構型的研究主要依據密井網資料,利用層次分析法,結合沉積相模式分級次開展儲層構型預測。然而,在目標區沉積相認識有誤或構型模式不清楚的情況下,井間難于預測。為了進一步弄清地質體沉積過程,水槽沉積實驗模擬地質體沉積過程得到了發展應用。隨著大數據信息技術發展,學者利用Google地圖與實地考察相結合的研究手段進行類比研究。由于Google地圖達不到精細砂體構型的研究精度(分辨率5~10 m),人工野外考察又有局限性,例如,定量化難度大、工作效率低等。基于此,本文引入了基于無人機傾斜攝影的三維數字露頭表征技術。無人駕駛飛機簡稱“無人機”,英文縮寫為“UAV”(Unmanned Aerial Vehicle),是利用無線電遙控設備和自備的程序控制裝置操縱的不載人飛機。目前,無人機技術在農林[14]、軍事[15]、城市規劃[16]及其他行業[17- 18]取得了較好的發展,探討把無人機引入到野外地質工作中來,利用無人機的迅速、高精度及定量化特點開展野外露頭考察輔助研究工作,不僅對拓展沉積學研究方法具有重要意義,同時對提高野外露頭考察效率和資料利用率具有重要的實踐意義。
1 傳統野外考察的局限性
野外地質考察作為基礎、重要、直觀的地質學研究手段,傳統主要靠人工逐點考察,此方法具有明顯的局限性。主要包括以下幾點:
(1) 資料獲取程度低
傳統地質考察的技術手段主要是照相、丈量、取樣和描述等,很多部位無法采集數據,例如:淺積水區、高陡露頭區、超大(長)沉積體系等。
(2) 獲取資料的工作效率低
傳統地質考察主要依賴于人工逐點工作,采用斷續工作的方式,重點剖面重點分析,這樣工作效率低下,每日考察量十分局限。有時,對于有些距離生活區較遠、氣候惡劣的考察點,白晝考察量更加局限,甚至剛到考察點就需盡快返回。
(3) 已獲取資料精度差異大、系統性連續性差、處理難度大
傳統地質考察在典型考察點資料相對充分,表現出局部精度高,而整體精度低、資料連續性和系統性差的特點。另一方面,離開露頭區后,在后續研究過程中,照片資料拼接處理難度較大。
(4) 資料定量化難度大
傳統地質考察坐標信息主要用GPS定位儀確定,點→點之間坐標信息統一性差。而對于高、陡、窄剖面的測量主要依靠簡易比例尺估算,顯然此方法誤差較大。
(5) 資料利用率低
傳統野外考察獲取資料后,后續研究主要應用照片描述、簡易比例尺測量估算等數據,目前數據挖掘不夠,定量化儲層地質知識庫存在明顯不足。
(6) 傳統人工逐點考察具有潛在危險性
傳統人工逐點野外考察常常需要人為攀爬懸崖峭壁、涉足未知積水區等潛在危險區域,人身安全受到很大威脅。
(7) 上述系列問題引起了解釋結論與地質真相相去甚遠
基于傳統野外考察的技術特點導致解釋結論與地質真相差異較大。
2 無人機傾斜攝影的特點
2.1 無人機裝置特點
無人機在很多領域取得了良好的應用效果,例如,軍事目標偵查與攜載武器打擊目標、農業應用無人機噴灑農藥與數字智慧城市建設等方面。目前,無人機主要有固定翼和多旋翼兩種類型。其中,固定翼飛機靠螺旋槳或者渦輪發動機產生的推力作為飛機向前飛行的動力,主要的升力來自機翼與空氣的相對運動。固定翼無人機主要應用在在大航程,高度較高時,比如電力巡線,公路的監控等等。而多旋翼是依靠多個旋翼產生的升力來平衡飛行器的重力,讓飛行器可以飛起來,通過改變每個旋翼的轉速來控制飛行器的平穩和姿態。所以多旋翼飛行器可以懸停,在一定速度范圍內以任意的速度飛行,基本上就是一個空中飛行的平臺,可以在平臺上搭載傳感器、相機和機械手之類的儀器。總體來說,固定翼無人機操作相對較難,而多旋翼相對操作簡單。
本文采用的是常規八旋翼無人機,型號TTA-M8FA(圖1A),飛機由八個可以高速旋轉的槳葉組成,無人機的主要參數如下:無人機及配套裝置的重量約9 kg,尺寸1.81 m×1.81 m×1.65 m,最大載荷5 kg,控制半徑2 000 m,飛行速度0~12 m/s,抗風能力6級,空中飛行時間約30分鐘。八旋翼無人機以高速的飛行方式可以在復雜區域進行野外地質露頭資料的采集。
2.2 傾斜攝影技術
傳統的無人機攝影測量通常是對測區進行正直攝影,并保證航行帶間區域重疊達到15%~30%,航帶內相鄰像片之間有60%的重疊,以實現立體測圖。而當物體完全豎直時,正直攝影對表征三維形態、規模存在較大難度,甚至無法攝影垂直角度的物體。因此,為了更好的表征地表三維形態及特征,學者們提出了傾斜攝影的方法[19]。傾斜攝影技術克服了傳統航攝從垂直角度拍攝的局限,通過在同一飛行平臺上搭載多臺傳感器,同時從1個垂直角度和4個傾斜角度(傾斜45°,分別位于北東、北西、南東、南西四個方向)采集紋理影像,同時內置的控制器支持多種拍照觸發模式(脈沖PWM觸發、定時觸發、快門信號觸發),相機像素1億,精度根據需要可以持續增加,可持續變焦距,定點曝光和定時曝光(圖1B)(表1),更加真實地反映地表物體的實際情況,彌補正射影像的不足。2010年4月9日,我國測繪行業首次引進傾斜攝影技術。近年來,傾斜攝影技術在測繪、國土安全、城市管理等領域應用日益廣泛[16,19- 21]。
傾斜攝影技術主要優點有以下幾個方面:1)資料獲取程度高,可以從5個視角全面的掃描地表露頭;2)獲取資料的工作效率高(飛機巡航速度快(60 km/h));3)資料精度高、系統性強,整體連續性差異性小,分辨率統一;4)照片拼接處理則相對簡單;5)圖像數據定量化、測量準確,有三維坐標信息、高陡窄剖面測量誤差小;6)資料可利用率高,三維數據體的坐標和圖像信息利用率高;7)對比人工逐點考察危險性大大降低;解釋結論合理性增強。
3 研究區實例分析
3.1 露頭區概況
野外露頭地理位置位于山西省呂梁市坪頭鎮,坪頭鄉剖面地層發育了奧陶系上統馬家溝組(O3m)、石炭系中統本溪組(C2b)、二疊系下統太原組(P1t)、山西組(P1s)、二疊系上統上石盒子組(P2sh)(圖2);剖面各個層位地層發育齊全且出露條件較好,巖性類型豐富。人工考察野外線路約15 km,考察重點點位從185~230,共計46點,考察時間約為10小時。與此同時,無人機并行飛行工作,三維數據初始模型全部收集完畢耗時約為1小時。
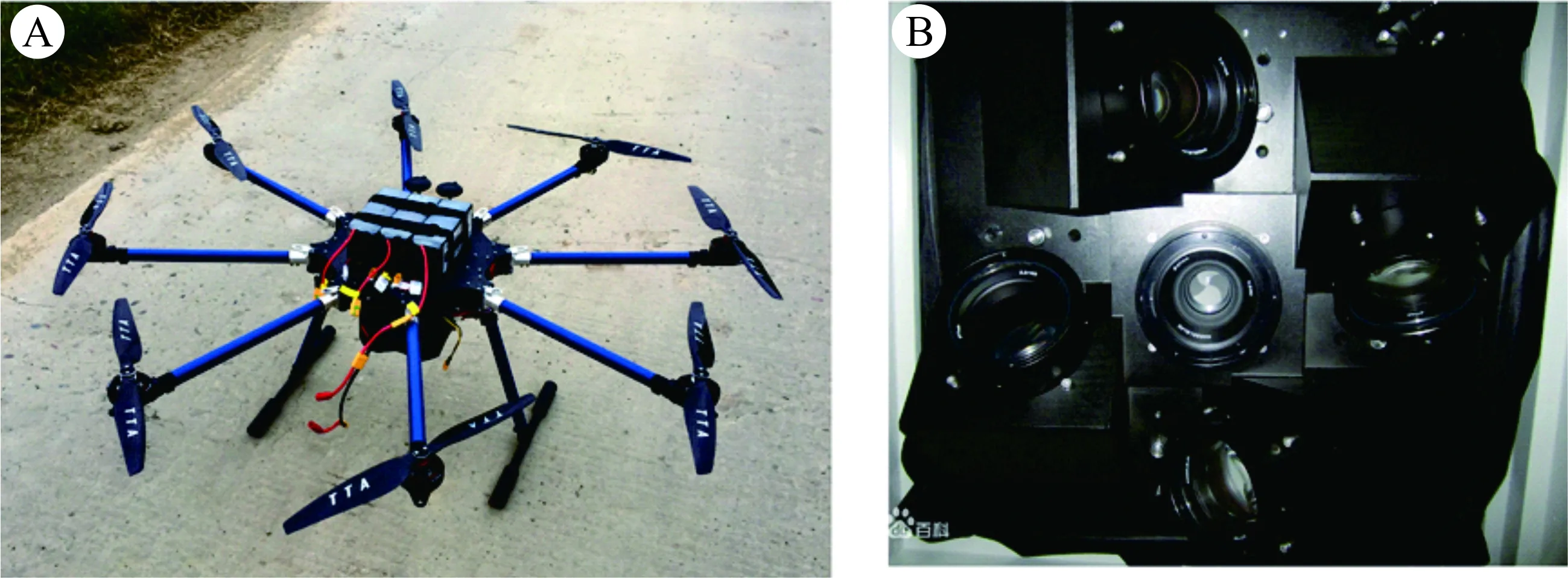
圖1 無人飛機和傾斜攝影相機A.八翼無人機;B.五個鏡頭的傾斜攝影相機Fig.1 Unmanned Aerial Vehicle (UAV) and Oblique camera

相機參數工作環境外觀尺寸相機數量有效像素總像素傳感器尺寸像元尺寸圖像分辯率傾斜角度存儲容量曝光方式鏡頭焦距工作溫度工作濕度尺寸重量5個4240萬2億1千萬35.9mm×24.0mm4.525μm7952×530445°320G飛控觸發曝光35mm-10℃~60℃95%260mm×220mm×177mm3200g
3.2 無人機采集三維露頭模型
3.2.1 無人機野外工作流程
無人機野外采集的具體流程包括八個步驟:1)野外露頭的探勘與無人機裝置組裝,對野外露頭的典型點位進行人工探勘并用多個紅旗標識GPS定點來標明典型點位,組裝無人機,做好飛行前的各項準備工作;2)飛機巡航路線規劃,通過無人機飛行配套軟件的GPS定位功能,對無人機即將要飛行的區域進行路線規劃,選擇最優路線完成工作任務;3)飛機互動測試,在飛行前對飛行控制器進行響應測試,防止飛機空中失控;4)飛行坐標信息及傾斜攝影成像,無人機按照預定路線自動巡航,并實時的完成坐標及攝影成像掃描;5)空地信息互傳,無人機把空中數據實時傳輸到地面接受器,實現信息及時空地互傳;6)二維及三維數據體測量,對獲取數據進行簡單測試,測試是否滿足采集需求,不滿足需求則需要重新規劃采集;7)點云數據處理,對采集數據進行二次處理,獲取坐標與圖像的高精度數據;8)三維數字露頭模型,利用專有軟件處理得到三維空間的數字露頭模型(圖3A)。
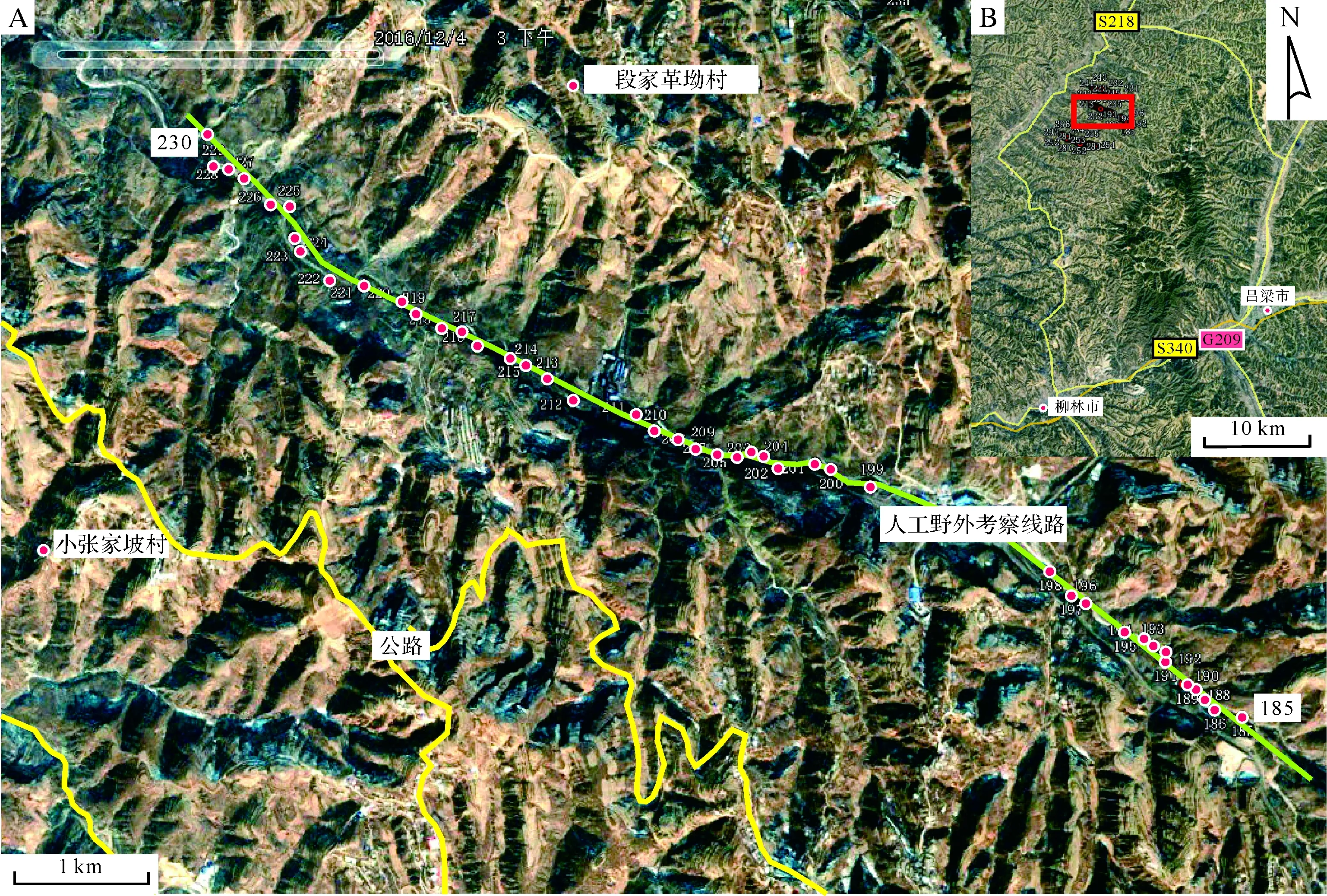
圖2 野外露頭區位置圖A.野外露頭路線及點位;B.野外露頭分布區域特點Fig.2 Location of outcrop area
在研究流程方面相對于傳統地質考察研究,無人機獲取資料具有定量化程度高、系統性強的特點可以更加精準建立研究區的儲層地質知識庫。無人機野外露頭解釋的具體流程包括以下幾個步驟:1)露頭的描述、測量及采樣等基礎工作;2)典型露頭剖面解剖,主要包括巖石相、構型單元及疊置樣式研究;3)多露頭剖面對比,在典型的區塊進行對比研究;4)沉積構型模式研究,利用上述研究成果開展構型模式研究;5)建立儲層地質知識庫,在沉積構型模式的研究基礎上,開展地質知識庫的研究(圖3B)。
3.2.2 無人機三維數字露頭模型采集
利用無人機傾斜攝影技術對研究區進行了數據采集,數據模型主要由點云數據及圖像數據組成。采集的數據模型具有其他野外采集方法(例如三維激光掃描儀器)不具備的優勢,即三維坐標(經度、緯度、海拔)信息,這種坐標信息與圖像信息具有很好匹配性,為三維地質建模奠定了良好的基礎。
飛機按照預定規劃的路線對露頭區進行巡航掃描,飛機從飛行起點出發,按照設定曝光方式邊飛邊迅速拍照,記錄坐標的同時記錄了圖像信息,信息被地面接收器接收,形成地空互動傳輸掃描的工作流程。飛機在開始往返掃描過程中,平面順次飛行連續抵達飛行終點(圖4A),最后被地面接收器接收安全返回地面,完成研究區露頭掃描。掃描模型具三維坐標信息(經度、緯度、海拔)(圖4A),可以準確定量描述任意位置坐標。同時,模型中的地質體的規模特征也較好的得到了表達,例如砂體寬度信息(圖4B)、砂體厚度信息(圖4C)。建立的三維露頭模型庫任意視角查看放大顯示局部信息(常規分辨率約在3~5 cm,隨著相機像素增加與飛行高度的設置可以進一步增加分辨率)。另一方面,三維模型可以分析查看人工考察不到的野外露頭剖面(圖4),大大的改進了工作效率,提高了定量化程度。

圖3 無人機野外露頭采集、處理及解釋流程A.數據采集、處理流程;B.野外露頭解釋流程Fig.3 Collection, processing and interpretation flowchart of outcrops with unmanned aerial vehicle
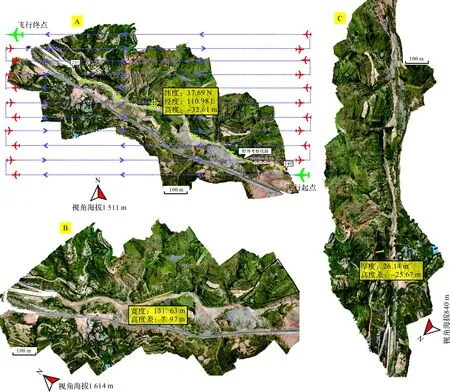
圖4 無人機傾斜攝影三維露頭模型A.正北俯視圖、坐標信息與飛行路線;B.北西向俯視圖與寬度值;C.北西向平視圖與厚度值Fig.4 3D digital outcrop model processed by UAV oblique photography
3.3 三維數字露頭表征
3.3.1 模型網格化
野外露頭初始模型可以利用采集的點云和圖像信息進行網格化,形成三維網格化數據模型。由于地質研究具有明顯的層次結構性,而這種結構性需從三維空間的角度去描述與表征,因此模型的網格化對認知采集的野外露頭模型十分重要,通過網格化的地質體大大方便了三維空間的建模工作,為下一步三維數字露頭的表征奠定良好的基礎。采集的數據模型主要是點云和圖像,點云數據是攜帶具有掃描資料以點的形式記錄,每一個點包含有三維坐標,有些可能含有顏色信息(RGB)或反射強度信息(Intensity)。顏色信息通常是通過相機獲取彩色影像,然后將對應位置的像素的顏色信息(RGB)賦予點云中對應的點。強度信息的獲取是激光掃描儀接收裝置采集到的回波強度,此強度信息與目標的表面材質、粗糙度、入射角方向,以及儀器的發射能量,激光波長有關。在采集的三維數據模型中,工區攜帶有坐標信息的點云數據根據地形復雜程度形成密集數據點(圖5A),這種點云數據耦合該點傾斜攝影照片數據(瓦片區塊成像)(圖5B)。利用Context Capture軟件,對點云數據經過處理后形成野外露頭三維網格化模型(圖5C,D,E)。
3.3.2 模型數字化表征
無人機傾斜攝影采集三維數字模型,更多的是為數字地質露頭服務,最終是為了更好的服務于地質。地質認識的形成需要越來越精確、定量化的表征與描述,需要不斷的豐富地質知識庫的內涵,包括地層界限、巖性及其組合特征、地質體形態、規模、方向和疊置樣式等等。研究選擇了三個典型露頭區,其一位于無人機飛行起點,為奧陶系馬家溝組碳酸鹽巖灰巖與石炭系中統本溪組碎屑巖形成的不整合界面(圖6A)。剖面出露較好,巖性自下而上由碳酸鹽巖灰巖、變質巖風化殼、塊狀砂巖與泥巖構成。剖面儲層的疊置樣式,主要是下伏的塊狀寬厚比大的灰巖與碎屑巖砂壩、水道疊置而成(圖6B)。灰巖巖性在研究區視域范圍內邊界不明顯,單砂體的厚度大約在2 m,寬度約80~100 m。
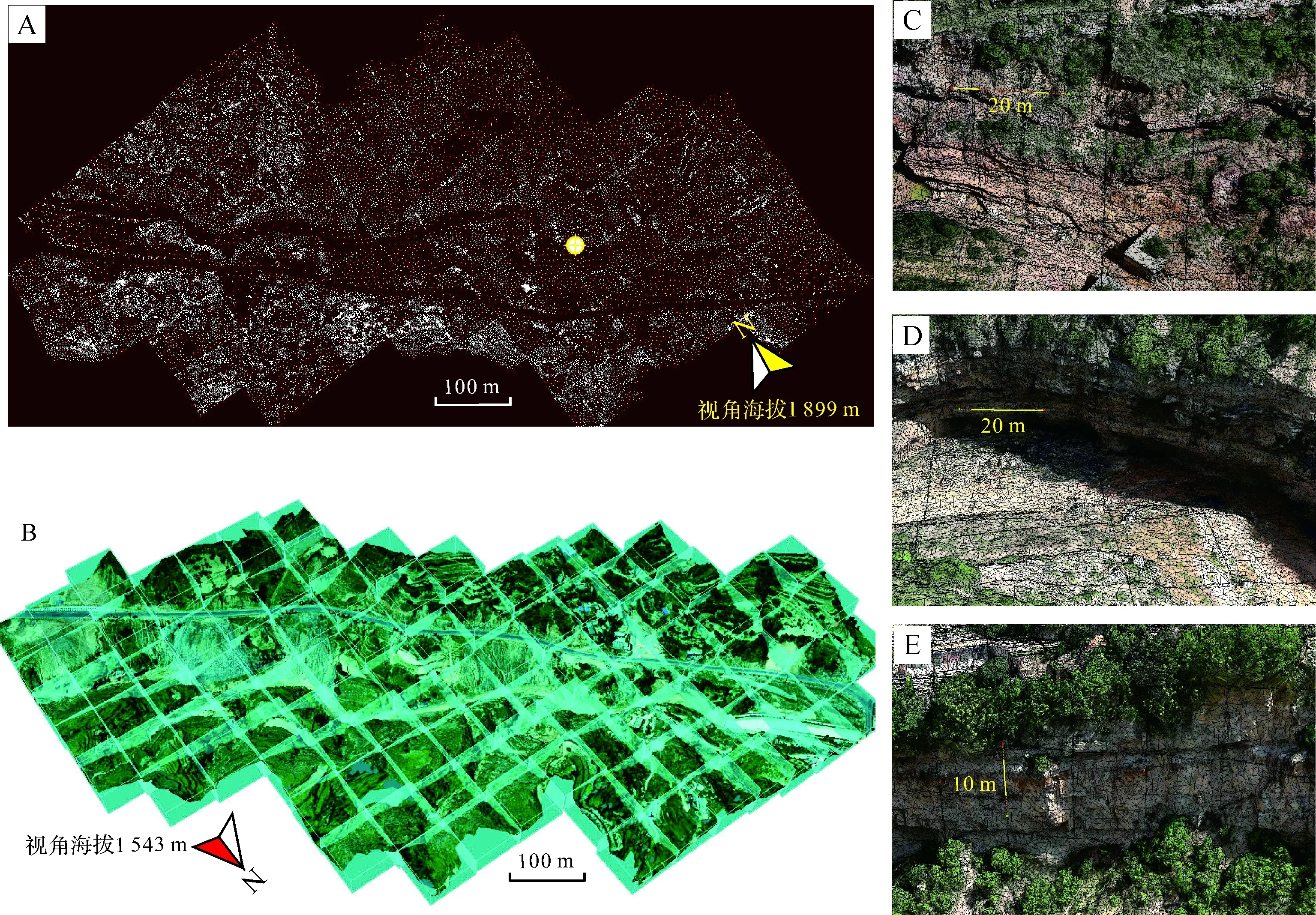
圖5 網格化露頭模型A.點云數據;B.瓦片分區;C,D,E.不同位置網格化模型Fig.5 3D outcrop model gridding
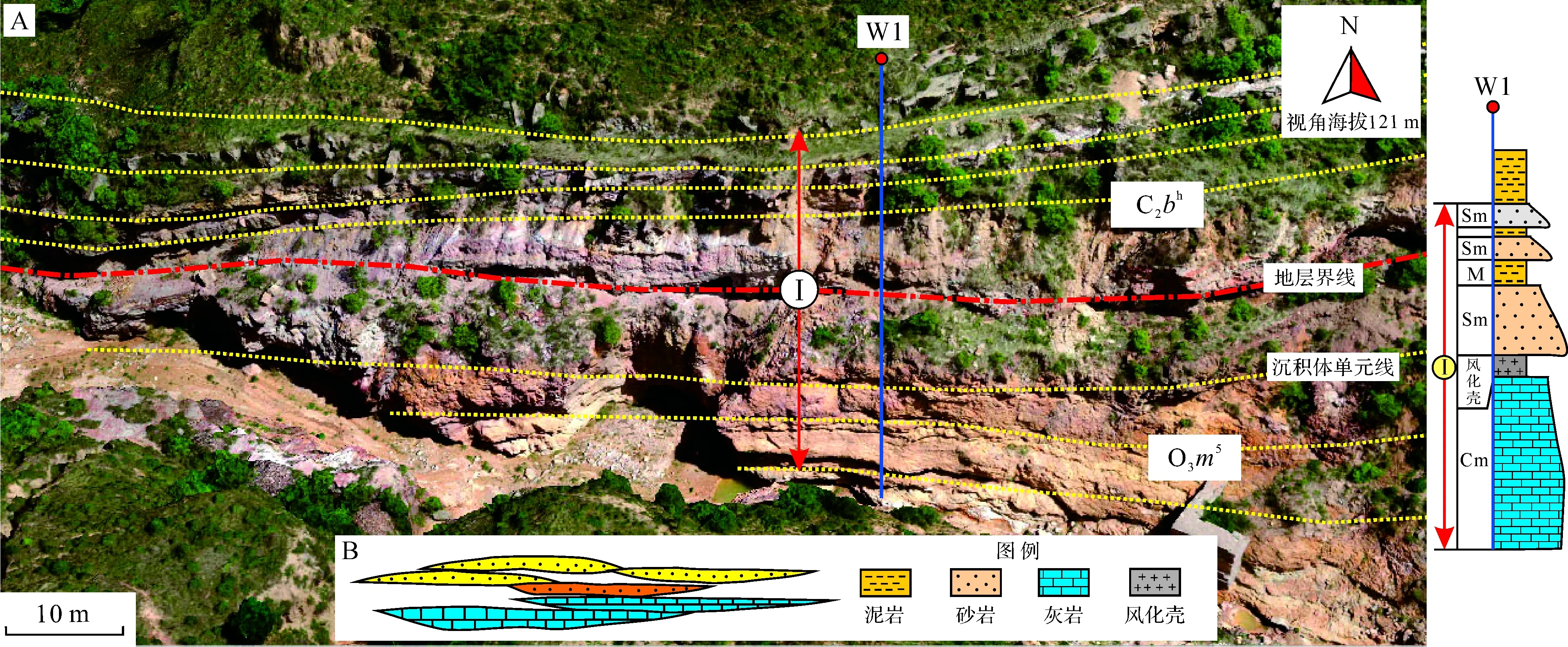
圖6 典型露頭之一——碳酸鹽巖與碎屑巖地層疊置A.無人機飛行剖面;B.巖性體疊置樣式Fig.6 No.1 typical outcrops, carbonate rocks and clastic strata superimposed outcrop
典型露頭區之二位于無人機飛行中間,為石炭系中統本溪組砂巖與煤層疊置(圖7A),剖面出露較好。剖面巖性自下而上由多期次塊狀砂巖、煤層與泥巖構成,主要由下伏的薄層狀寬厚比較大砂壩、水道與煤層疊置而成(圖7B)。研究區的砂巖厚度約為0.5 m,煤層厚度約0.3 m,視域范圍內砂體的拼接疊置導致延伸很長。
典型露頭區之三位于無人機飛行即將結束位置,為石炭系中統本溪組分流水道與砂壩的疊置(圖8A)。剖面出露較好,巖性自下而上由多期次塊狀砂、泥巖構成,主要由下伏的薄層狀寬厚比較大砂壩、水道與煤層疊置而成(圖8B)。研究區的砂巖厚度約為0.5 m,視域范圍內砂體的拼接疊置導致延伸范圍很長。
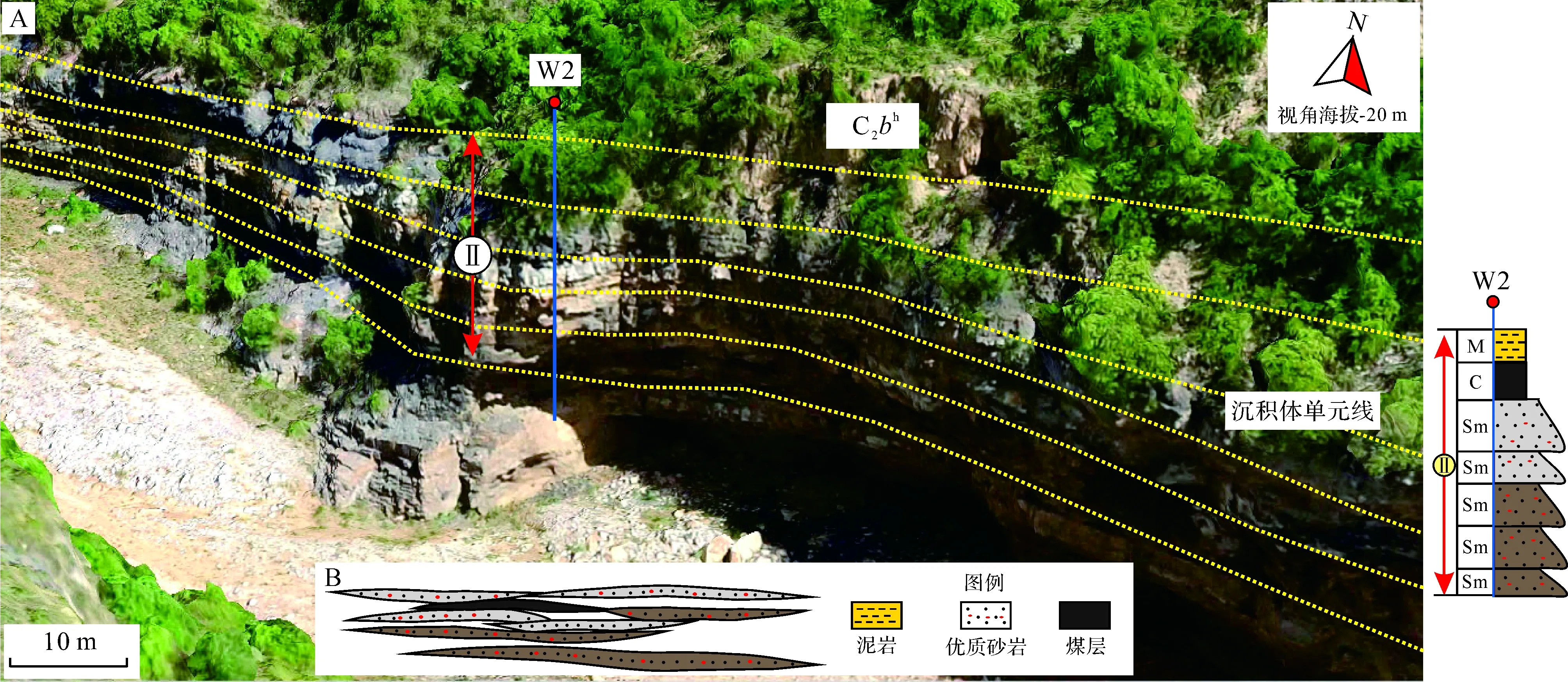
圖7 典型露頭之二——砂巖與煤層疊置A.無人機飛行剖面;B.巖性體疊置樣式Fig.7 No.2 typical outcrops, sandstone and coal superimposed outcrop

圖8 典型露頭之三——不同規模的砂體疊置A.無人機飛行剖面;B.巖性體疊置樣式Fig.8 No.3 typical outcrops, different scale of superimposed sandstone
3.3.3 無人機與人工考察的結合
前已述及無人機的很多優點,例如,快捷、高效和定量化等方面。然而,因無人機無法代替人工現場對露頭研究區的地質信息分析,所以無人機也需要與人工考察相結合。從研究區拍照采集的情況來看,人工考察分辨率(毫米級)高過無人機(厘米級),因人工考察受時間限制,不可能無限詳盡的拍攝,這樣就導致了獲取資料系統性差異很大。另一方面,露頭地質體本身是三維的,而人工考察主要以不規則的二維剖面為主。因此,需要結合無人機系統性及全面性的特點,盡量避免地質認識的“橫看成嶺側成峰,遠近高低各不同”的情況。
此外,人工考察對比無人機,在局部特定的沉積構造研究方面具有明顯的優點。但是,人工考察在定量化的方面,存在較大缺陷。例如,對視長度較長的剖面(>200 m),相機在保持精度的情況下,無法一次全鏡頭拍攝。不過,人工考察時為了保證剖面的連續性和系統性,往往需要犧牲精度,一般采用遠景拍攝與近景多次多方位拍攝相結合的方法來解決。
4 討論與結論
無人機搭載SHARE- 200傾斜攝影相機進行飛行掃描的過程中,也存在不足:其一,天氣晴朗掃描效果好,如果遇到云、雨、霧的天氣,掃描的點云數據會受到影響,清晰度和分辨率降低;其二,野外露頭測量精度主要受搭載相機的分辨率控制,可以根據需要的精度搭載相應的傾斜攝影相機,一般來說,常用相機的分辨率約4千萬像素(7 952×5 304像素),在飛機200 m飛行時露頭分辨率約為5~10 cm。
在目前流行的野外露頭技術,如全站儀、三維激光掃描、探地雷達等數字露頭技術中,應用比較多的三維激光掃描技術在野外數據采集精度上具有明顯優勢[22],但是高精度的數據體反而給數據處理和抽稀帶來了非常大的難度,另一方面,三維激光掃描的本質還是二維掃描,缺乏三維坐標數據,如果遇到高陡剖面,在測量上依然有誤差,離真正的三維數字露頭還相去甚遠。本文提出的基于無人機傾斜攝影的三維數字露頭信息豐富,關鍵是具有坐標信息,使得真正三維數字露頭成為了可能,目前主要是對地表出露的信息進行了研究,下一步需要基于傾斜攝影數據模型進一步開展研究,深化對內部地質體結構的認識。
通過上述研究,得出了如下結論:
(1) 傳統地質考察不足主要有以下七個方面:1)資料獲取程度低;2)獲取資料的工作效率低;3)資料精度不統一、系統性差、處理難度大;4)資料定量化難度大、復雜地質情況準確測量難度大;5)資料利用率低;6)人工逐點考察具有潛在危險性;7)系列問題引起了解釋結論與地質真相相去甚遠。
(2) 無人機傾斜攝影具有明顯的技術優勢,對傳統人工地質考察具有方法創新性。掃描模型具三維坐標信息(經度、緯度、海拔),可以準確獲取任意位置坐標。同時,模型常規分辨率約在3~5 cm,完全滿足野外考察的一般需求。另一方面,三維模型可以分析人工沒有或考察不到的野外露頭剖面,不僅大大的改進了工作效率,而且提高了定量化程度。
(3) 利用露頭采集數據實例,對研究區露頭進行了巖相構型分析。無人機傾斜攝影不僅使三維地質露頭表面數字成像成為現實,而且對砂體內部結構的認識更加定量化與精細化,對于建立訓練圖像、地質知識庫進行三維地質建模具有重要參考價值,是輔助地質學家進行高效野外考察的先進技術。
致謝 感謝審稿專家的寶貴意見!
)
[1] 李陽,吳勝和,侯加根,等. 油氣藏開發地質研究進展與展望[J]. 石油勘探與開發,2017,44(4):569- 579. [Li Yang, Wu Shenghe, Hou Jiagen, et al. Progress and prospects of reservoir development geology[J]. Petroleum Exploration and Development, 2017, 44(4): 569- 579.]
[2] Zeng H L, Loucks R G, Frank Brown L Jr. Mapping sediment- dispersal patterns and associated systems tracts in fourth- and fifth- order sequences using seismic sedimentology: example from Corpus Christi Bay, Texas[J]. AAPG Bulletin, 2007, 91(7): 981- 1003.
[3] 于興河,李勝利,李順利. 三角洲沉積的結構:成因分類與編圖方法[J]. 沉積學報,2013,31(5):782- 797. [Yu Xinghe, Li Shengli, Li Shunli. Texture- genetic classifications and mapping methods for deltaic deposits[J]. Acta Sedimentologica Sinica, 2013, 31(5): 782- 797.]
[4] 朱筱敏,劉媛,方慶,等. 大型坳陷湖盆淺水三角洲形成條件和沉積模式:以松遼盆地三肇凹陷扶余油層為例[J]. 地學前緣,2012,19(1):89- 99. [Zhu Xiaomin, Liu Yuan, Fang Qing, et al. Formation and sedimentary model of shallow delta in large- scale lake: Example from Cretaceous Quantou Formation in Sanzhao sag, Songliao Basin[J]. Earth Science Frontiers, 2012, 19(1): 89- 99.]
[5] Miall A D. The geology of fluvial deposits[M]. Berlin Heidelberg: Springer Verlag, 1996: 75- 178.
[6] 吳勝和,紀友亮,岳大力,等. 碎屑沉積地質體構型分級方案探討[J]. 高校地質學報,2013,19(1):12- 22. [Wu Shenghe, Ji Youliang, Yue Dali, et al. Discussion on hierarchical scheme of architectural units in clastic deposits[J]. Geological Journal of China Universities, 2013, 19(1): 12- 22.]
[7] 印森林,陳恭洋,戴春明,等. 河口壩內部儲層構型及剩余油分布特征:以大港油田棗南斷塊長軸緩坡辮狀河三角洲為例[J]. 石油與天然氣地質,2015,36(4):630- 639. [Yin Senlin, Chen Gongyang, Dai Chunming, et al. Reservoir architecture and remaining oil distribution in mouth bar: A case study on the braided delta of long- axis gentle slope in Zaonan fault block of Dagang oilfield[J]. Oil & Gas Geology, 2015, 36(4): 630- 639.]
[8] 印森林,劉忠保,陳燕輝,等. 沖積扇研究現狀及沉積模擬實驗:以碎屑流和辮狀河共同控制的沖積扇為例[J]. 沉積學報,2017,35(1):10- 23. [Yin Senlin, Liu Zhongbao, Chen Yanhui, et al. Research progress and sedimentation experiment simulation about alluvial fan: A case study on alluvial fan controlled by debris flow and braided river[J]. Acta Sedimentologica Sinica, 2017, 35(1): 10- 23.]
[9] 印森林,吳勝和,許長福,等. 砂礫質辮狀河沉積露頭滲流地質差異分析:以準噶爾盆地西北緣三疊系克上組露頭為例[J]. 中國礦業大學學報,2014,43(2):286- 293. [Yin Senlin, Wu Shenghe, Xu Changfu, et al. Percolation differences of sedimentary outcrop in sand- gravel braided river: A case study of Triassic upper Karamay Formation outcrop in the northwest edge of Junggar Basin[J]. Journal of China University of Mining & Technology, 2014, 43(2): 286- 293.]
[10] 印森林,吳勝和,陳恭洋,等. 基于砂礫質辮狀河沉積露頭隔夾層研究[J]. 西南石油大學學報(自然科學版),2014,36(4):29- 36. [Yin Senlin, Wu Shenghe, Chen Gongyang, et al. A study on intercalation of sand- gravel braided river deposit based on outcrop section[J]. Journal of Southwest Petroleum University (Science & Technology Edition), 2014, 36(4): 29- 36.]
[11] Posamentier H W. Depositional elements associated with a basin floor channel- levee system: case study from the gulf of Mexico[J]. Marine and Petroleum Geology, 2003, 20(6/7/8): 677- 690.
[12]Posamentier H W, Davies R J, Cartwright J A, et al. Seismic geomorphology: an overview[M]//Davies R J, Posamentier H W, Wood L J, et al. Seismic geomorphology: applications to hydrocarbon exploration and production. London: Geological Society, Special Publications, 2007: 1- 14.
[13] Morend D, Pugin A, Gorin G E. High- resolution seismic imaging of outcrop- scale channels and an incised- valley system within the fluvial- dominated Lower Freshwater Molasse (Aquitanian, western Swiss Molasse Basin)[J]. Sedimentary Geology, 2002, 149(4): 245- 264.
[14] 楊陸強,果霖,朱加繁,等. 我國農用無人機發展概況與展望[J]. 農機化研究,2017,39(8):6- 11. [Yang Luqiang, Guo Lin, Zhu Jiafan, et al. The development situation and prospect of agricultural UAV in China[J]. Journal of Agricultural Mechanization Research, 2017, 39(8): 6- 11.]
[15] 包戰,王樹文. 有人/無人機協同作戰能力生成問題研究[J]. 國防科技,2017,38(3):76- 79. [Bao Zhan, Wang Shuwen. Research on generating the cooperative operational ability of the manned/unmanned aerial vehicles[J]. National Defense Science & Technology, 2017, 38(3): 76- 79.]
[16] 彌永宏,張雪萍,李英杰. 基于傾斜攝影的三維城市建模研究[J]. 測繪與空間地理信息,2017,40(1):215- 217. [Mi Yonghong, Zhang Xueping, Li Yingjie. Research on 3D city modeling based on oblique photography[J]. Geomatics & Spatial Information Technology, 2017, 40(1): 215- 217.]
[17] 畢凱,李英成,丁曉波,等. 輕小型無人機航攝技術現狀及發展趨勢[J]. 測繪通報,2015(3):27- 31,48. [Bi Kai, Li Yingcheng, Ding Xiaobo, et al. Aerial photogrammetric technology of light small UAV: status and trend of development[J]. Bulletin of Surveying and Mapping, 2015(3): 27- 31, 48.]
[18] 王涵. 無人機航跡規劃及導航定位系統研究[D]. 杭州:浙江大學,2017. [Wang Han. Research on the path planning and positioning navigation system of UAV[J]. Hangzhou: Zhejiang University, 2017.]
[19] 史文中,曹輝,張劍清. 基于高分辨率影像的城市三維建模[J]. 武漢大學學報(信息科學版),2004,29(9):783- 787. [Shi Wenzhong, Cao Hui, Zhang Jianqing. 3D urban building modeling based on high resolution satellite images[J]. Geomatics and Information Science of Wuhan University, 2004, 29(9): 783- 787.]
[20] 孫亮,夏永華. 基于無人機傾斜攝影技術測繪大比例尺地形圖的可行性研究[J]. 價值工程,2017,36(8):209- 212. [Sun Liang, Xia Yonghua. The feasibility study of mapping large- scale topographic based on UAV oblique photography[J]. Value Engineering, 2017, 36(8): 209- 212.]
[21] 周曉波,王軍,周偉. 基于無人機傾斜攝影快速建模方法研究[J]. 現代測繪,2017,40(1):40- 42. [Zhou Xiaobo, Wang Jun, Zhou Wei. Research on rapid modeling method based on UAV oblique photography[J]. Modern Surveying and Mapping, 2017, 40(1): 40- 42.]
[22] 朱如凱,白斌,袁選俊,等. 利用數字露頭模型技術對曲流河三角洲沉積儲層特征的研究[J]. 沉積學報,2013,31(5):867- 877. [Zhu Rukai, Bai Bin, Yuan Xuanjun, et al. A new approach for outcrop characterization and geostatistical analysis of meandering channels sandbodies within a delta plain setting using digital outcrop models: upper Triassic Yanchang tight sandstone formation, Yanhe outcrop, Ordos Basin[J]. Acta Sedimentologica Sinica, 2013, 31(5): 867- 877.]
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
