接觸電阻對傳感器采樣影響分析
2018-02-28 09:38:04何雨昂徐志書龍海峰桑慶宏樊茜
電子技術與軟件工程 2018年23期
何雨昂 徐志書 龍海峰 桑慶宏 樊茜


摘要
本文分析了在工程應用中多余物對產品可靠性的影響,同時解釋了該現象產生的原因;說明了一種多余物引入導致電子產品在特殊條件下發生故障的方式。
【關鍵詞】接觸電隊 傳感器 異常現象
1 引言
在伺服系統中,常使用電阻板片式位置傳感器采集伺服執行機構的實際運動位置。當該傳感器采樣出現擾動時,會導致位置伺服閉環控制異常。該異常現象隨位置伺服變化而變化,在伺服執行機構動作至行程最大值附近時,采樣誤差最為明顯;當伺服執行機構動作至行程最小值附近時,基本檢測不到采樣誤差。本文針對以上現象進行分析,得出該現象的產生原因。
2 伺服系統組成及異常現象
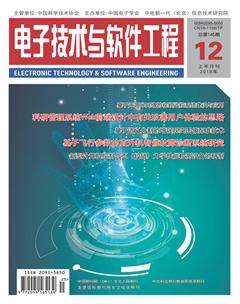
伺服系統控制永磁同步電機轉動,帶動絲杠伸縮,實現位置伺服控制。其原理框圖如圖1所示。
由圖1可以看出,伺服系統由電流傳感器構成內環控制;由旋轉變壓器構成中間環控制;由位置傳感器構成外環控制。內環實現永磁同步電機的出力穩定,中間環實現電機轉速穩定,外環實現位置伺服的精確控制。
若異常存在時,伺服控制驅動器在振動環境下工作,會出現線位移反饋在某些位置抖動的現象,同時伺服系統工作電流增大,母線電壓出現波動。該現象如圖2所示。
伺服控制驅動器控制機電作動器在兩個正弦曲線的運動過程中,控制驅動器全程均在振動環境下,但僅在兩個正半周出現明顯采樣異常現象。
3 原因分析與計算
伺服作動器的線位移通過線位移傳感器采集實際運動位置,供電使用10V,為提高傳感器線性度,在傳感器機械零位增加5V電源。出現該異常現象是由于10V電源連接器位置存在多余物。伺服控制驅動器的電連接器若引入多余物,在靜態下往往不易發現,但在振動環境下,該多余物會導致連接器的接觸電阻在振動過程中增大。伺服控制驅動器位置傳感器的硬件連接關系如圖3所示。
如圖3所示,當電刷采集到的電壓為Ux時,由歐姆定律可知:因此,推導Ux的關系式為:
若不存在ΔR時,其電壓Ux2為:
由于ΔR為異常接觸電阻,其數值可變,因此在接觸良好的條件下不存在ΔR,此時波動電壓ΔUx與電阻的關系式為:
經過簡化為:
由以上關系式中,R為電位計電阻,可認為其為恒值ΔR為接觸電阻,可認為其為恒值。因此可以得出結論:因接觸電阻ΔR變化產生的誤差電壓ΔUx的大小,與電刷采集的電阻Rx成正比關系。
4 計算驗證
極限工況1:電刷位置接近線位移板片端頭時,即Rx約為R,同時設電阻R為1KΩ,假定ΔR為10Ω。
極限工況2:電刷位置接近線位移板片中間位置,假定即Rx約為10Ω,假定ΔR為10Ω。
將以上兩個工況分別帶入ΔUx的關系式,得出的結果如表1所示。
由以上計算可以直觀地看出,當線位移傳感器的電刷接近中間值時,由于接觸電阻導致的誤差電壓不足1mV,但當線位移傳感器的電刷接近最大值,此時所測量的電壓僅增大約1倍,但此時誤差電壓增大了兩個數量級。因此,從原理上可以證明當電刷接近最大值時,所采集的誤差電壓明顯增大的故障現象。
5 結論
通過以上分析,證明電子產品在對接面產生多余物在一定的條件下會導致異常現象,該現象僅與供電回路中一個網絡的阻抗相關。
參考文獻
[1]許龍飛.運載火箭總裝氣密試驗多余物控制方法分析[J].北京:質量與可靠性,2017.
[2]張輝.航天繼電器多余物檢測方法的綜合分析與討論[J].四川:機電元件,2003.