夾剪一體的荔枝采摘末端執(zhí)行器設(shè)計(jì)與性能試驗(yàn)
2018-03-01 10:22:38蔣志林李嘉威王佳盛劉威威鄒湘軍
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2018年1期
陳 燕 蔣志林 李嘉威 王佳盛 劉威威 鄒湘軍
(華南農(nóng)業(yè)大學(xué)工程學(xué)院, 廣州 510642)
0 引言
荔枝采收是荔枝產(chǎn)業(yè)的一個(gè)重要環(huán)節(jié),采用機(jī)器人采摘能高效作業(yè),改善勞動(dòng)條件,并克服傳統(tǒng)人工采收高成本的缺點(diǎn)。機(jī)器人通過末端執(zhí)行器對(duì)果蔬進(jìn)行采收,是直接與果蔬接觸的重要部件[1-2],它對(duì)果蔬的采摘效率、采摘損傷率、采摘范圍都有很大影響。
針對(duì)不同果蔬的生長(zhǎng)特性、采摘農(nóng)藝要求,國(guó)內(nèi)外學(xué)者對(duì)各種果蔬采摘末端執(zhí)行器進(jìn)行了大量研究[3-15]。但這些末端執(zhí)行器大多采用2個(gè)動(dòng)力源實(shí)現(xiàn)“夾持果實(shí)或果梗、切割果梗”的采摘?jiǎng)幼鱗8-13],其控制相對(duì)繁瑣,相對(duì)單驅(qū)動(dòng)整體質(zhì)量增加,體積加大。同時(shí),部分末端執(zhí)行器采用圓形刀片旋轉(zhuǎn)切割[10-12],采摘時(shí),因復(fù)雜的野外環(huán)境容易造成采摘對(duì)象及其周邊的枝、葉受損。此外,由于果蔬自然生長(zhǎng)的隨機(jī)性和不確定性,針對(duì)柑橘、蘋果、番茄等球狀果蔬的抓持[12-15],國(guó)內(nèi)外學(xué)者研究了擬人指的末端執(zhí)行器,而關(guān)于夾持串果母枝或單果果梗的末端執(zhí)行器研究則較少報(bào)道。
基于此,本文以成簇生長(zhǎng)于樹上的荔枝串果為研究對(duì)象,并克服已有末端執(zhí)行器的不足,對(duì)夾剪一體的荔枝采摘末端執(zhí)行器進(jìn)行設(shè)計(jì),制作其物理樣機(jī),并對(duì)6自由度機(jī)器人進(jìn)行工作性能試驗(yàn)。
1 末端執(zhí)行器設(shè)計(jì)
1.1 整體結(jié)構(gòu)及工作原理
荔枝成簇生長(zhǎng)于樹上,人工采摘時(shí),先用手指夾持固定串果母枝,然后剪斷母枝并將串果取下。根據(jù)其采摘方式,本文提出一種夾剪一體結(jié)構(gòu)的荔枝采摘末端執(zhí)行器,它采用單動(dòng)力源驅(qū)動(dòng),采摘時(shí)對(duì)荔枝串果母枝采用剪切方式,避免了因旋轉(zhuǎn)切割造成荔枝及其周邊枝、葉受損的問題。該末端執(zhí)行器由剪切模塊、夾持模塊、動(dòng)力輸出模塊、機(jī)械臂連接組件4部分組成,其整體結(jié)構(gòu)如圖1所示。

圖1 末端執(zhí)行器整體結(jié)構(gòu)Fig.1 Overall structure of end-effector1.柔性指 2.剛性指 3.右刀片 4.左刀片 5.擺桿 6.復(fù)位扭簧 7.支承板 8.動(dòng)力源 9.圓螺母 10.壓刀塊 11.連接組件 12.扇形齒輪 13.機(jī)架 14.擺桿轉(zhuǎn)軸 15.刀片銷軸 16.滾子
采摘時(shí),動(dòng)力源輸出扭矩,齒輪嚙合實(shí)現(xiàn)左、右擺桿聯(lián)動(dòng),通過擺桿滾子壓迫刀背實(shí)現(xiàn)左、右刀片閉合剪切動(dòng)作,同時(shí),安裝于刀片下方的柔性指和剛性指隨刀片閉合轉(zhuǎn)動(dòng)而閉合夾持。采摘后,舵機(jī)輸出反向動(dòng)力,擺桿組件反向張開,左、右刀片在復(fù)位扭簧的回彈作用下復(fù)位,同時(shí)帶動(dòng)夾指張開使串果滑落。
1.2 剪切模塊
1.2.1 本體設(shè)計(jì)
剪切模塊的基本原理為雙搖桿滑塊機(jī)構(gòu)和齒輪傳動(dòng)機(jī)構(gòu)的組合,通過齒輪嚙合傳動(dòng)使左右對(duì)稱的雙搖桿滑塊機(jī)構(gòu)實(shí)現(xiàn)聯(lián)動(dòng)。
具體實(shí)施結(jié)構(gòu)由圖1可知,左、右刀片通過刀片銷軸鉸接于機(jī)架上,刀片外側(cè)設(shè)置擺桿組件,且通過齒輪嚙合聯(lián)動(dòng),從而帶動(dòng)刀片閉合剪切。自然狀態(tài)下,刀片在復(fù)位扭簧的回彈作用下張開,刀背緊貼擺桿滾子。
1.2.2 剪切力學(xué)模型
根據(jù)剪切模塊的機(jī)構(gòu)簡(jiǎn)圖構(gòu)建其剪切力學(xué)分析圖,如圖2所示。末端執(zhí)行器工作時(shí),動(dòng)力通過齒輪嚙合傳遞至左右擺桿組件末端滾子并分別作用于左刀片(Fa)和右刀片(Fb),實(shí)現(xiàn)對(duì)串果母枝的剪切力分別為Fk1和Fk2,其數(shù)值相等,由此可得動(dòng)力扭矩與剪切力、各力臂的關(guān)系為
(1)
式中M——剪切執(zhí)行力矩,N·mml1——擺桿作用力分力的力臂,mml2——剪切力臂,mml3——擺桿力臂,mmφ——Fa與Fa1(Fb與Fb1)的夾角,(°)

圖2 剪切力學(xué)分析圖Fig.2 Cutting mechanical analysis diagram
通過搭建剪切試驗(yàn)平臺(tái)進(jìn)行10次重復(fù)剪切試驗(yàn)可知,當(dāng)剪切直徑為8 mm的串果母枝時(shí),所需最大剪切力平均為100 N;根據(jù)荔枝采摘環(huán)境和6自由度的機(jī)器人本體尺寸,取剪切模塊的結(jié)構(gòu)設(shè)計(jì)尺寸為l1=78.94 mm、l2=75.00 mm、l3=75.00 mm;測(cè)得Fa與Fa1的夾角φ=27.54°。代入式(1),求得滿足最大剪切要求的剪切執(zhí)行力矩M為160.73 N·mm。
1.3 夾持模塊
1.3.1 本體設(shè)計(jì)
為模擬人指夾持串果母枝的采摘?jiǎng)幼鳎瑢⒛┒藞?zhí)行器的夾持結(jié)構(gòu)設(shè)計(jì)成“二指夾持”形式,具有較好的夾持穩(wěn)定性,可有效實(shí)現(xiàn)對(duì)采摘對(duì)象的夾持[16]。
具體實(shí)施結(jié)構(gòu)由圖1可知,將左、右夾指分別緊固于剪切刀片下方,采取“一剛一柔”的配合形式,隨動(dòng)于剪切刀片。左夾指為柔性指,模擬人手并攏的食指和中指,指面為“平板指面”形式;右夾指為剛性指,模擬人手拇指,指面為“V”型槽指面形式。
1.3.2 穩(wěn)定夾持的力封閉性分析
末端執(zhí)行器是否能穩(wěn)定夾持目標(biāo)和合理提供夾持力是評(píng)價(jià)其工作性能的重要指標(biāo)之一[16]。
夾持時(shí),可將夾指與串果母枝接觸段視作規(guī)則圓柱體,如圖3所示。柔性指平板指面與母枝接觸區(qū)域?yàn)?條接觸邊線,剛性指“V”型槽指面與母枝的接觸區(qū)域?yàn)?條基礎(chǔ)邊線。根據(jù)圣維南原理,每條邊線的接觸分布力約束可簡(jiǎn)化為一個(gè)空間接觸點(diǎn)的接觸合力模型。因此,可對(duì)夾指與串果母枝接觸段視作三“指”抓持目標(biāo)的力學(xué)狀態(tài),與機(jī)器人的多指抓取原理相似[17]。
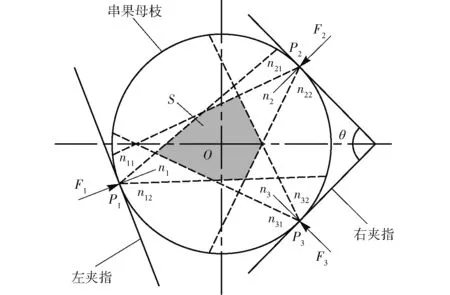
圖3 夾指夾持串果母枝截面圖Fig.3 Section diagram of clamping fruiting cane

DF=W
(2)
式中D——夾持矩陣,D∈R6×9
由于式(2)在夾指穩(wěn)定夾持前提下必定有解,故矩陣D必定可逆,則R(D)=6,為行滿秩矩陣。因此,滿足三指夾持的力封閉性第一判別條件[18-19]。同時(shí),由圖3可知,夾指的接觸面均與串果母枝相切,故接觸合力內(nèi)法矢量F1、F2、F3必匯交于點(diǎn)O,且點(diǎn)O存在于接觸合力點(diǎn)P1、P2、P3處由摩擦錐匯交形成的多邊形S中(交集域S為非空)。因此,滿足三指夾持的力封閉性第二判別條件[18-19]。
綜上所述,本文提出的夾指模塊設(shè)計(jì)方案,能夠穩(wěn)定夾持荔枝串果母枝,滿足力封閉性原則。
1.3.3 穩(wěn)定夾持力學(xué)模型
在荔枝的實(shí)際采摘過程中,夾持模塊的作用為預(yù)壓緊并定位串果母枝,有利于刀具剪切;當(dāng)串果母枝被剪斷后,夾指能提供足夠的夾緊力夾持荔枝串果,避免荔枝串果在之間掉落,造成跌落碰撞損傷。
當(dāng)夾指夾緊串果母枝時(shí),視其夾緊段為規(guī)則圓柱體,并以母枝的回轉(zhuǎn)軸線為z軸,以母枝的橫截面為xOy二維坐標(biāo)平面,且點(diǎn)O在z軸上;令?yuàn)A指對(duì)母枝夾持時(shí)的接觸正壓力分別為F1、F2和F3,建立其夾持力學(xué)模型如圖4所示。當(dāng)夾指能穩(wěn)定夾持荔枝串果時(shí),其靜力平衡方程為
(3)
式中Fi——夾指指面對(duì)串果母枝接觸正壓力,Nμ——摩擦因數(shù)G——串果總重量,N
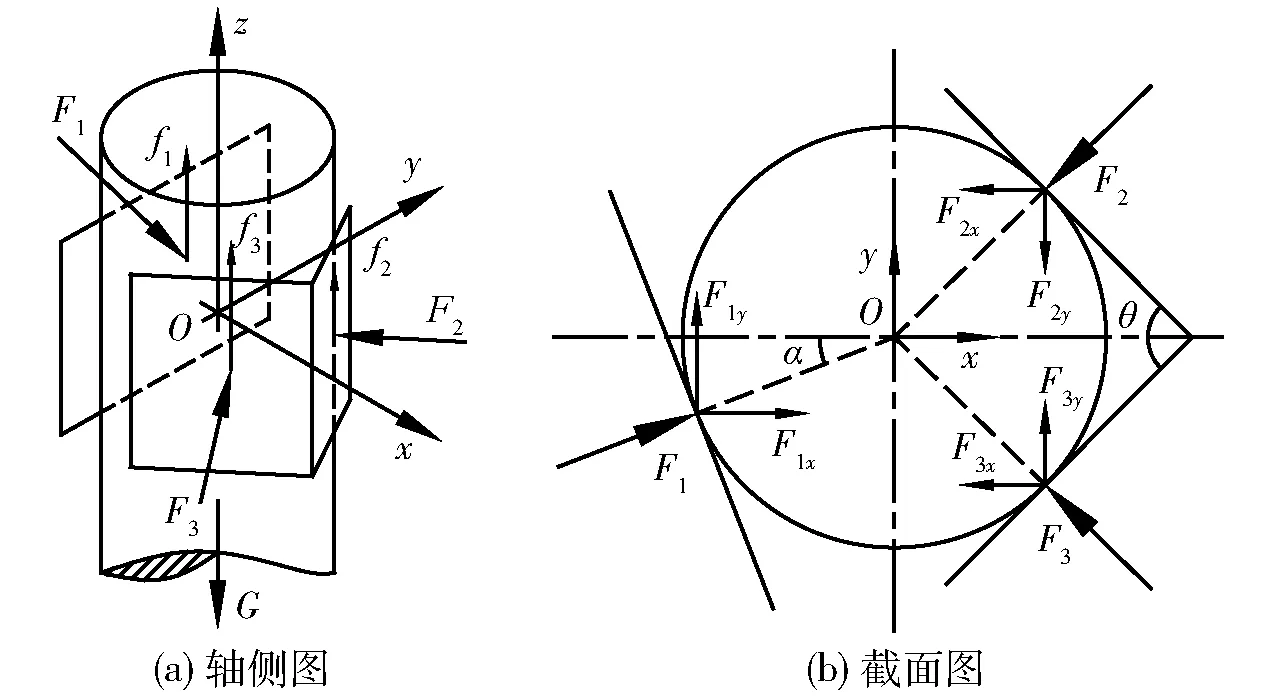
圖4 串果母枝穩(wěn)定夾持力學(xué)分析圖Fig.4 Stable clamping mechanical analysis diagram of fruiting cane
夾指接觸面與串果母枝相切,接觸正壓力矢量均通過圖中圓心O,故將各力矢量簡(jiǎn)化至點(diǎn)O,獲得力系的靜力平衡方程為
(4)
式中Fix——F1、F2、F3在平面坐標(biāo)系xOy的x軸上的投影分力,N
Fx——F1、F2、F3在平面坐標(biāo)系xOy的x軸上的合力,N
Fiy——F1、F2、F3在平面坐標(biāo)系xOy的y軸上的投影分力,N
Fy——F1、F2、F3在平面坐標(biāo)系xOy的y軸上的合力,N
MiO——F1、F2、F3對(duì)點(diǎn)O的力矩,N·mm
MO——F1、F2、F3對(duì)點(diǎn)O的合力矩,N·mm
將式(4)展開,得
(5)
由于F1、F2、F3均通過點(diǎn)O,因此F1、F2、F3相對(duì)于點(diǎn)O的力矩為0,即M1O=M2O=M3O=0,則進(jìn)一步獲得平衡方程為
(6)
式中α——左夾指夾持過程中轉(zhuǎn)動(dòng)的角度,(°)θ——右夾指“V”型槽兩斜面的夾角,(°)
由式(3)和式(6)聯(lián)立,求得夾持模塊指面作用于串果母枝時(shí)的接觸正壓力F1、F2、F3分別為
(7)
式(7)即為末端執(zhí)行器夾持模塊穩(wěn)定夾持串果母枝的三點(diǎn)接觸正壓力計(jì)算模型。由此可知,當(dāng)串果質(zhì)量越大,穩(wěn)定夾持時(shí)所需的接觸正壓力越大;當(dāng)夾指指面越粗糙,則接觸正壓力越小。
荔枝串果成簇采摘時(shí),其質(zhì)量通常不超過1 kg,取G=10 N;剛性指指面“V”型槽兩斜面夾角的設(shè)計(jì)角度為θ=90°;當(dāng)串果母枝直徑為10 mm,穩(wěn)定夾持時(shí),計(jì)算得柔性指扭轉(zhuǎn)角α=13.77°;根據(jù)前期試驗(yàn)[20],當(dāng)夾指指面材料為橡膠時(shí),μ=0.89。因此,通過式(7)計(jì)算可得荔枝串果穩(wěn)定夾持時(shí)三點(diǎn)接觸正壓力為F=(F1,F2,F3)=(4.73 N,4.05 N,2.45 N)。由此可知,只要三點(diǎn)接觸正壓力F1≥4.73 N、F2≥4.05 N、F3≥2.45 N,則可保證夾持可靠、穩(wěn)定,荔枝串果不會(huì)掉落。
2 樣機(jī)性能試驗(yàn)與分析
根據(jù)末端執(zhí)行器的設(shè)計(jì)方案制作了其物理樣機(jī),并將其安裝在6自由度機(jī)器人上進(jìn)行多項(xiàng)工作性能試驗(yàn)。
2.1 采摘試驗(yàn)
為檢驗(yàn)本文設(shè)計(jì)的末端執(zhí)行器對(duì)荔枝串果母枝的采摘剪切性能,對(duì)具有不同直徑母枝的荔枝串果進(jìn)行了采摘試驗(yàn)。
2.1.1 材料與方法
品種為“桂味”荔枝串果母枝,采自華南農(nóng)業(yè)大學(xué)植物園。試樣選取較筆直且?guī)в蟹种Ш腿~的母枝串,直徑分別為3、4、5、6、7 mm,母枝長(zhǎng)為8~15 cm。將母枝綁于荔枝模型上,制作荔枝串果采摘模型。

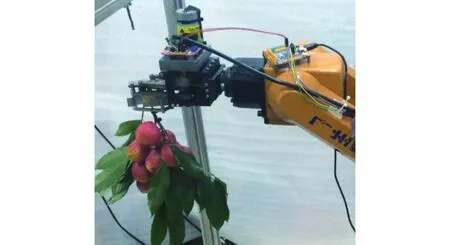
圖5 采摘試驗(yàn)現(xiàn)場(chǎng)圖Fig.5 Scene picture of picking experiment
試驗(yàn)后統(tǒng)計(jì)采摘成功率和采摘時(shí)間。采摘時(shí)間為從刀片準(zhǔn)備進(jìn)入串果采摘點(diǎn)開始,控制末端執(zhí)行器夾持剪切母枝,直到母枝被剪斷且夾指穩(wěn)定夾持串果為止。
2.1.2 結(jié)果分析
采摘試驗(yàn)統(tǒng)計(jì)結(jié)果如表1所示。由表可知,采摘時(shí)間與串果母枝直徑無關(guān),試驗(yàn)范圍內(nèi),末端執(zhí)行器的平均采摘時(shí)間為2 s左右;在50次的荔枝串果采摘試驗(yàn)中,采摘成功42次,失敗8次;其中,對(duì)于母枝直徑為3~5 mm的串果,采摘成功率均為100%;對(duì)于母枝直徑為6~7 mm的串果,采摘平均成功率為70%。
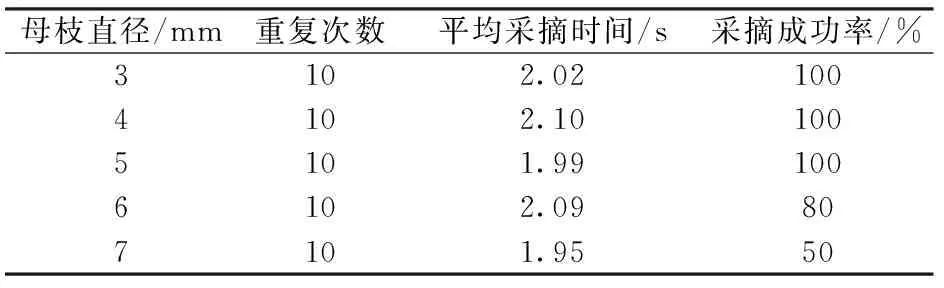
表1 采摘試驗(yàn)統(tǒng)計(jì)結(jié)果Tab.1 Statistical results of picking experiment
圖6為采摘直徑為6 mm和7 mm的母枝斷面圖。由圖可見,母枝斷面存在毛刺,側(cè)面有擠壓痕跡。因此,串果母枝的剪切破壞并非純剪切,還包括右刀片刃傾角對(duì)母枝的擠壓破壞、左刀片排開角對(duì)母枝切口造成的拉伸破壞。

圖6 串果母枝剪切斷口Fig.6 Shear-cut mouth of fruiting cane
2.2 靜態(tài)和動(dòng)態(tài)負(fù)重試驗(yàn)
荔枝采摘時(shí),若末端執(zhí)行器夾持不可靠,容易造成成簇荔枝脫落損傷。通過負(fù)重試驗(yàn)可考察該末端執(zhí)行器最大穩(wěn)定夾持荔枝串果的質(zhì)量。由于在野外采摘環(huán)境下,被夾持的串果可能受到來自外界的干擾(機(jī)械臂運(yùn)動(dòng)中產(chǎn)生的振動(dòng)或風(fēng)等自然因素),荔枝串果會(huì)發(fā)生擺動(dòng)。因此本文分別進(jìn)行了靜態(tài)和動(dòng)態(tài)的負(fù)重試驗(yàn)。
2.2.1 材料與方法
靜態(tài)負(fù)重試驗(yàn):在串果母枝的一端吊掛重物,末端執(zhí)行器穩(wěn)定夾持母枝的另一端(圖7)。夾持過程中,不斷增加重物的質(zhì)量,直至重物在夾持模塊中脫落,并記錄夾持物質(zhì)量。
動(dòng)態(tài)負(fù)重試驗(yàn):采摘時(shí),被夾持的串果受外界的干擾會(huì)發(fā)生擺動(dòng),正常情況下這種擺動(dòng)不會(huì)太大,本文選擇較大擺角120°進(jìn)行試驗(yàn)。試驗(yàn)時(shí)串果母枝和重物按圖7所示方式夾持,然后將重物扳至與鉛垂方向呈60°夾角后松開,使其作擺角為120°的自由鐘擺運(yùn)動(dòng)(重復(fù)擺動(dòng)5次),當(dāng)重物擺動(dòng)趨于靜止后不脫落,則進(jìn)一步增添重物質(zhì)量,直至擺動(dòng)的重物脫落,并記錄夾持物質(zhì)量。

圖7 負(fù)重試驗(yàn)Fig.7 Weight bearing experiment
2.2.2 結(jié)果分析
圖8為串果母枝直徑與末端執(zhí)行器最大負(fù)重關(guān)系曲線。由圖可知:靜態(tài)負(fù)重時(shí)末端執(zhí)行器的負(fù)重性能優(yōu)于擺動(dòng)干擾狀態(tài);隨著母枝直徑的增大,最大負(fù)重質(zhì)量隨之增大;試驗(yàn)范圍內(nèi),母枝直徑3~5 mm范圍內(nèi),最大負(fù)重質(zhì)量增大緩慢,母枝直徑5~7 mm范圍內(nèi),最大負(fù)重質(zhì)量增加較快。當(dāng)果梗直徑增大,柔性指扭轉(zhuǎn)角增大,果梗受到的正壓力增大;同時(shí),果梗直徑增大,其與柔性指的真實(shí)接觸面積增大。由于這兩方面原因,當(dāng)果梗直徑較大時(shí),隨著果梗直徑的增加,最大負(fù)重量增大較快。通過負(fù)重試驗(yàn)可知,當(dāng)串果母枝直徑為3 mm時(shí),動(dòng)態(tài)和靜態(tài)最大負(fù)重質(zhì)量分別為1.33 kg和1.67 kg;當(dāng)串果母枝直徑為7 mm時(shí),動(dòng)態(tài)和靜態(tài)最大負(fù)重質(zhì)量分別為3.01 kg和3.67 kg。由于荔枝串果單串質(zhì)量通常低于1 kg,因此,本文設(shè)計(jì)的末端執(zhí)行器能滿足荔枝采摘夾持要求,具有良好的穩(wěn)定夾持功能。

圖8 母枝直徑與最大負(fù)重關(guān)系Fig.8 Relationship between diameter of fruit cane and maximal weight bearing
2.3 抗遮擋干擾試驗(yàn)
由于荔枝生長(zhǎng)環(huán)境的復(fù)雜性,采摘時(shí),采摘目標(biāo)前方會(huì)存在一定程度的遮擋物(枝、葉等)。通過抗遮擋干擾試驗(yàn),考察本文設(shè)計(jì)的末端執(zhí)行器在復(fù)雜環(huán)境下采摘性能。
2.3.1 材料與方法
把遮擋物的數(shù)量及干擾程度分為A(無遮擋)、B(輕微遮擋)、C(中度遮擋)、D(嚴(yán)重遮擋)4個(gè)等級(jí)。試驗(yàn)時(shí),首先尋找不同干擾等級(jí)的采摘位置,然后控制末端執(zhí)行器進(jìn)入采摘位置,并觀察刀片及夾指能否順利進(jìn)入串果母枝的預(yù)定采摘位置。
2.3.2 結(jié)果分析
分別對(duì)4種干擾級(jí)別的采摘點(diǎn)進(jìn)行多次重復(fù)試驗(yàn),如圖9所示。
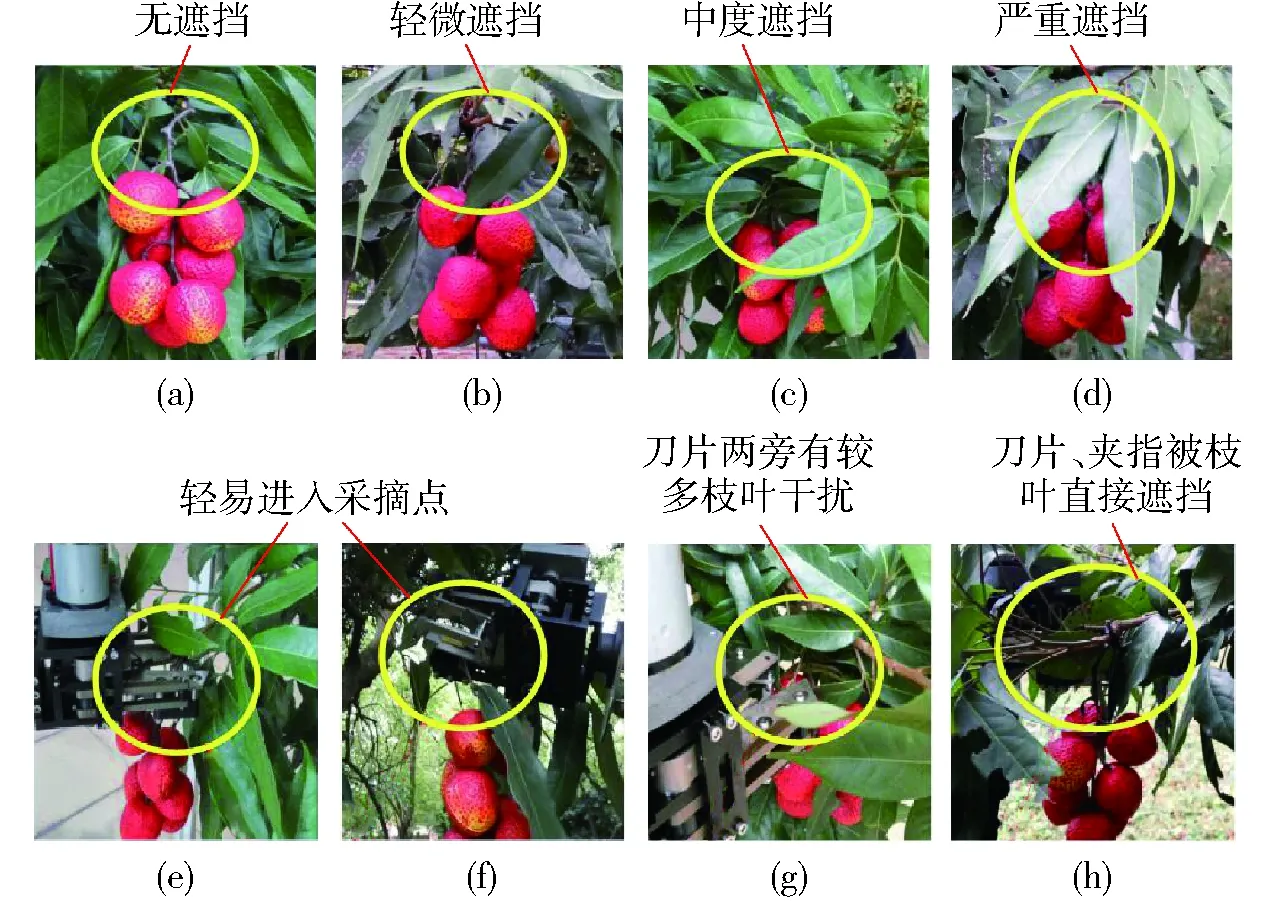
圖9 干擾采摘試驗(yàn)Fig.9 Interference picking experiment
觀察并分析試驗(yàn)情況可知:
干擾等級(jí)A:荔枝串果采摘點(diǎn)的母枝完全暴露,附近無枝葉擋在其前方,末端執(zhí)行器的剪切部位可順利到達(dá)串果采摘點(diǎn)。
干擾等級(jí)B:存在幾片葉子或者杈枝輕微遮擋在采摘點(diǎn)的兩側(cè)附近或正前方。當(dāng)串果采摘點(diǎn)進(jìn)入剪切部位時(shí),擋在采摘點(diǎn)兩側(cè)附近的枝葉可被刀具前端斜角排開;擋在采摘點(diǎn)的正前方的枝葉可被剪切部位包絡(luò)在剪切范圍內(nèi),采摘時(shí)可與母枝一起剪下,不影響采摘效果。
干擾等級(jí)C:采摘點(diǎn)前方兩側(cè)存在較茂密的枝葉。若末端執(zhí)行器剪切部位進(jìn)入串果采摘點(diǎn),則刀具前端容易將擋在采摘點(diǎn)前方的枝葉強(qiáng)行往荔枝串果方向推進(jìn),導(dǎo)致荔枝串果受牽連被往后擠退,采摘
點(diǎn)也隨之向后移動(dòng),形成了“刀進(jìn)果退,刀退果回”的采摘干擾現(xiàn)象。
干擾等級(jí)D:采摘點(diǎn)受枝葉嚴(yán)重遮擋。在這種情況下,串果母枝完全隱蔽于茂密的枝葉后方,阻礙采摘機(jī)器人對(duì)串果采摘點(diǎn)的識(shí)別與定位,末端執(zhí)行器無法采摘。
3 結(jié)論
(1)設(shè)計(jì)了一種單動(dòng)力源驅(qū)動(dòng)夾剪一體的荔枝采摘機(jī)器人末端執(zhí)行器,采用剪切方式,避免了旋轉(zhuǎn)切割造成荔枝及其周邊枝、葉受損的問題;夾持手指采取“一剛一柔”配合,柔性指平板指面,剛性指“V”型槽指面,可穩(wěn)定夾持荔枝串果母枝。
(2)試驗(yàn)測(cè)試表明,末端執(zhí)行器具有良好的夾持負(fù)重功能,母枝直徑分別為3 mm和7 mm時(shí),動(dòng)態(tài)最大負(fù)重質(zhì)量分別為1.33 kg和3.01 kg;采摘時(shí)能快速剪切母枝并穩(wěn)定夾持串果,平均夾剪時(shí)間為2 s,母枝直徑5 mm以下采摘成功率均為100%,母枝直徑6~7 mm采摘平均成功率為70%;具有中等的抗遮擋干擾采摘能力,當(dāng)采摘點(diǎn)前方兩側(cè)存在較茂密的枝葉或采摘點(diǎn)受枝葉嚴(yán)重遮擋時(shí),采摘困難或無法采摘。
(3)大直徑母枝的荔枝串果采摘成功率低,其可能原因是剪切刀片的刃角和左、右刀片裝配間隙不理想,導(dǎo)致對(duì)串果母枝的剪切破壞并非純剪切,伴隨有擠壓與拉伸破壞。
1 宋健, 張鐵中, 徐麗明, 等. 果蔬采摘機(jī)器人研究進(jìn)展與展望[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2006, 37(5): 158-162. SONG Jian, ZHANG Tiezhong, XU Liming, et al. Research actuality and prospect of picking robot for fruits and vegetables [J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(5): 158-162. (in Chinese)
2 李國(guó)利, 姬長(zhǎng)英, 翟力欣. 果蔬采摘機(jī)器人末端執(zhí)行器研究進(jìn)展與分析[J]. 中國(guó)農(nóng)機(jī)化學(xué)報(bào), 2014, 35(5): 231-236, 240. LI Guoli, JI Changying, ZHAI Lixin. Research progress and analysis of end-effector for fruits and vegetables picking robot [J]. Journal of Chinese Agricultural Mechanization, 2014, 35(5): 231-236, 240. (in Chinese)
3 NAOSHI K, KOKI Y. Development of an end-effector for a tomato cluster harvesting robot [J]. Engineering in Agriculture, Environment and Food, 2010, 3(1): 20-24.
4 BAETEN J, DONNé K, BOEDRIJ S, et al. Autonomous fruit picking machine: a robotic apple harvester [J]. Springer Tracts in Advanced Robotics, 2008,42:531-539.
5 VANHENTEN E J, VANTUIJL B A J, HEMMING J. Field test of an autonomous cucumber picking robot [J]. Biosystems Engineering, 2003, 86(3): 305-313.
6 KANAE T, TATESHI F. Cherry-harvesting robot [J]. Computers and Electronics in Agriculture, 2008, 63(1): 65-72.
7 傅隆生, 張發(fā)年, 槐島芳德, 等. 獼猴桃采摘機(jī)器人末端執(zhí)行器設(shè)計(jì)與試驗(yàn)[J/OL]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2015, 46(3): 1-8. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150301&flag=1.DOI:10.6041/j.issn.1000-1298.2015.03.001. FU Longsheng, ZHANG Fanian, GEJIMA Yoshinori, et al. Development and experiment of end-effector for kiwifruit harvesting robot [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 1-8. (in Chinese)
8 錢少明, 楊慶華, 王志恒, 等. 黃瓜抓持特性與末端采摘執(zhí)行器研究[J]. 農(nóng)業(yè)工程學(xué)報(bào), 2010, 26(7): 107-112. QIAN Shaoming, YANG Qinghua, WANG Zhiheng, et al. Research on holding characteristics of cucumber and end-effector of cucumber picking[J]. Transactions of the CSAE, 2010, 26(7): 107-112. (in Chinese)
9 王紅軍, 李馨富, 黃國(guó)鋼, 等. 香蕉采摘機(jī)械手抓取機(jī)構(gòu)設(shè)計(jì)及仿真[J]. 湘潭大學(xué)自然科學(xué)學(xué)報(bào), 2012, 34(3): 114-117. WANG Hongjun, LI Xinfu, HUANG Guogang, et al. Design and simulation of crawl institutions for picking bananas manipulator [J]. Natural Science Journal of Xiangtan University, 2012, 34(3): 114-117. (in Chinese)
10 葉敏, 鄒湘軍, 蔡沛鋒, 等. 水果采摘機(jī)器人通用夾持機(jī)構(gòu)設(shè)計(jì)[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2011, 42(增刊): 177-180. YE Min, ZOU Xiangjun, CAI Peifeng, et al. Clamping mechanism of fruits harvesting robot [J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(Supp.): 177-180. (in Chinese)
11 談建豪, 陳燕, 向和平, 等. 機(jī)器人串果采摘末端執(zhí)行器設(shè)計(jì)及仿真[J]. 農(nóng)機(jī)化研究, 2013,35(9): 133-136. TAN Jianhao, CHEN Yan, XIANG Heping, et al. Design and simulation of robot’s end-effector for string-fruit picking [J]. Journal of Agricultural Mechanization Research, 2013,35(9): 133-136. (in Chinese)
12 張水波. 柑橘采摘機(jī)器人末端執(zhí)行器研究[D]. 杭州: 浙江工業(yè)大學(xué), 2011. ZHANG Shuibo. Research on end-effector of citrus harvesting robot [D]. Hangzhou: Zhejiang University of Technology, 2011. (in Chinese)
13 LING P P, REZA E. Sensing and end-effector for a robotic tomato harvester[C]∥ASAE Annual International Meeting, ASAE Paper 043088,2004.
14 張飛. 欠驅(qū)動(dòng)機(jī)械手末端執(zhí)行器的設(shè)計(jì)與研究[D]. 杭州: 浙江理工大學(xué), 2014. ZHANG Fei. Design and research for the underactuated end-effector manipulator [D]. Hangzhou: Zhejiang Sci-Tech University, 2014. (in Chinese)
15 MUSCATO G, PRESTIFILIPPO M. A prototype of an orange picking robot past history, the new robot and experimental results[J]. Industrial Robot: An International Journal, 2005, 32(2): 128-138.
16 葉敏, 鄒湘軍, 楊洲, 等. 荔枝采摘機(jī)器人擬人指受力分析與夾持試驗(yàn) [J/OL]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2015, 46(9):1-8. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150901&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.09.001. YE Min, ZOU Xiangjun, YANG Zhou, et al. Clamping experiment on humanoid fingers of litchi harvesting robot [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(9): 1-8. (in Chinese)
17 李群明, 高丹, 鄧華. 重載夾持裝置接觸力的封閉性[J]. 機(jī)械工程學(xué)報(bào), 2010, 46(11): 36-42. LI Qunming, GAO Dan, DENG Hua. The contact force-closure of heavy duty gripping mechanisms [J]. Journal of Mechanical Engineering, 2010, 46(11): 36-42. (in Chinese)
18 XIONG Youlun. Theory of point contact restraint and qualitative analysis of robot grasping [J]. Science in China Ser A, 1994(5): 629-640.
19 劉慶運(yùn), 蔣波, 豆勤勤. 三指手抓取力封閉性的簡(jiǎn)單判別算法[J]. 機(jī)械科學(xué)與技術(shù), 2010, 29(4): 498-503. LIU Qingyun, JIANG Bo, DOU Qinqin. On force-closure grasping of three-fingered robot hand [J]. Mechanical Science and Technology for Aerospace Engineering, 2010, 29(4): 498-503. (in Chinese)
20 陳燕, 蔡偉亮, 向和平, 等. 面向機(jī)器人采摘的荔枝果梗力學(xué)特性[J]. 農(nóng)業(yè)工程學(xué)報(bào), 2012, 28(21): 53-58. CHEN Yan, CAI Weiliang, XIANG Heping, et al. Mechanical properties of litchi stem for harvesting robots [J]. Transactions of the CSAE, 2012, 28(21): 53-58. (in Chinese)
