基于離散粒子群和偏最小二乘的水源地濁度高光譜反演
2018-03-01 10:24:01冶運(yùn)濤趙紅莉蔣云鐘嚴(yán)登明
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2018年1期
關(guān)鍵詞:模型
曹 引 冶運(yùn)濤 趙紅莉 蔣云鐘 王 浩, 嚴(yán)登明
(1.東華大學(xué)國(guó)家環(huán)境保護(hù)紡織工業(yè)污染防治工程技術(shù)中心, 上海 201620;2.中國(guó)水利水電科學(xué)研究院流域水循環(huán)模擬與調(diào)控國(guó)家重點(diǎn)實(shí)驗(yàn)室, 北京 100038)
0 引言
湖泊作為人類重要的水源地,具有灌溉、防洪、供水和養(yǎng)殖以及重要的生態(tài)系統(tǒng)功能[1]。隨著社會(huì)經(jīng)濟(jì)的高速發(fā)展,農(nóng)業(yè)生產(chǎn)逐漸由傳統(tǒng)農(nóng)業(yè)向具有集約化、專業(yè)化、智能化等特征現(xiàn)代農(nóng)業(yè)發(fā)展[2-3],以高投入、高產(chǎn)出、高排放為特征的現(xiàn)代農(nóng)業(yè)帶來(lái)嚴(yán)重的面源污染,主要表現(xiàn)為農(nóng)業(yè)生產(chǎn)中化肥低利用率導(dǎo)致大量無(wú)法被植物吸收利用的氮、磷、鉀等養(yǎng)分直接隨著灌溉水、地表徑流等進(jìn)入水源地[3],加上生活污水直接排放帶來(lái)的營(yíng)養(yǎng)物質(zhì),導(dǎo)致水源地水體富營(yíng)養(yǎng)化日趨嚴(yán)重[4]。濁度阻礙光在水體中的傳輸,對(duì)水中浮游植物的生長(zhǎng)具有重要影響,是表征水體富營(yíng)養(yǎng)化狀況的一項(xiàng)重要指標(biāo)[5]。當(dāng)水生植物分布較少時(shí),水體濁度由總懸浮濃度主導(dǎo),其變化可以識(shí)別水體懸浮物的輸移、沉淀以及再懸浮過(guò)程[6]。濁度作為一種重要的水質(zhì)參數(shù),可有效表征水質(zhì)污染狀況,遙感技術(shù)作為一種區(qū)域性監(jiān)測(cè)手段,越來(lái)越多地應(yīng)用于水質(zhì)監(jiān)測(cè)和水環(huán)境管理,為實(shí)現(xiàn)水體濁度高頻次、大范圍的監(jiān)測(cè)提供了可能。
水質(zhì)遙感監(jiān)測(cè)的關(guān)鍵在于遙感反演模型的構(gòu)建。目前基于實(shí)測(cè)光譜和衛(wèi)星遙感數(shù)據(jù)的水體濁度反演模型主要有經(jīng)驗(yàn)?zāi)P蚚7-8]、半分析模型[9-10]和分析模型[11]。相對(duì)于經(jīng)驗(yàn)和半分析模型,雖然以生物光學(xué)模型為代表的分析模型具有明確的物理意義和較好的移植性,但其所需的水質(zhì)參數(shù)固有光學(xué)特性卻難以準(zhǔn)確獲取,導(dǎo)致生物光學(xué)模型在水質(zhì)監(jiān)測(cè)中應(yīng)用較少[12];經(jīng)驗(yàn)?zāi)P秃桶敕治瞿P蛢H能利用一個(gè)或幾個(gè)光譜波段信息,限制了模型反演精度的進(jìn)一步提高。偏最小二乘法作為一種多元回歸方法,可以綜合利用多個(gè)波段信息來(lái)反演水質(zhì)參數(shù)濃度,在葉綠素a濃度和總懸浮物濃度反演中應(yīng)用較多,在濁度反演中應(yīng)用較少。有研究表明,當(dāng)輸入偏最小二乘模型的波段數(shù)遠(yuǎn)大于樣點(diǎn)數(shù)時(shí),模型的不確定性大大增加[13]。對(duì)于偏最小二乘法建模采用波段個(gè)數(shù)的確定,諸多學(xué)者采用了不同的方法[14-24]。上述學(xué)者研究的水質(zhì)指標(biāo)主要是葉綠素a和總懸浮物濃度,鮮有水體濁度偏最小二乘反演相關(guān)研究;所采用的數(shù)據(jù)源以實(shí)測(cè)高光譜數(shù)據(jù)源為主,基于衛(wèi)星高光譜數(shù)據(jù)源的偏最小二乘模型在水體濁度反演中的適用性尚缺乏研究。
針對(duì)上述不足,本文以典型內(nèi)陸淺水湖微山湖為研究區(qū),以HJ-1A HSI高光譜影像為數(shù)據(jù)源,首先對(duì)HJ-1A HSI高光譜反射率進(jìn)行歸一化處理,分別構(gòu)建基于原始光譜反射率和歸一化光譜反射率的濁度偏最小二乘反演模型,同時(shí)利用離散粒子群算法(DBPSO)確定濁度偏最小二乘(PLS)模型建模所需的特征波段,然后基于優(yōu)選的特征波段提出并構(gòu)建水體濁度DBPSO-PLS反演模型,研究光譜歸一化處理和特征波段優(yōu)選對(duì)偏最小二乘模型精度的影響;最后選擇精度最高的模型反演微山湖水體濁度分布,研究基于衛(wèi)星高光譜數(shù)據(jù)源的偏最小二乘模型在水體濁度反演中的適用性。
1 數(shù)據(jù)
1.1 研究區(qū)概況
微山湖地處116°58′~117°21′E,34°27′~34°52′N,位于山東省南四湖的最南端,隸屬于山東省濟(jì)寧市微山縣,微山湖是南四湖面積最大的一個(gè)湖泊,面積達(dá)660 km2,是中國(guó)北方最大的淡水湖;其平均水深不足2 m,春夏湖泊中生長(zhǎng)有各種水生植物,是典型的內(nèi)陸淺水草型湖泊;微山湖作為南水北調(diào)東線工程重要的湖泊水源地,同時(shí)具有防洪、灌溉、養(yǎng)殖和航運(yùn)等生態(tài)系統(tǒng)服務(wù)功能,遙感監(jiān)測(cè)微山湖水體濁度對(duì)南水北調(diào)東線水質(zhì)的監(jiān)控與管理具有重要意義。
1.2 數(shù)據(jù)獲取與處理
2015年10月16—17日,在微山湖布設(shè)了23個(gè)采樣點(diǎn)(圖1),利用哈希濁度計(jì)現(xiàn)場(chǎng)測(cè)量濁度。各采樣點(diǎn)處水體濁度如圖2所示。由圖2可以看出,水體濁度較高,且不同采樣點(diǎn)差異顯著,這是因?yàn)?0月末,微山湖生長(zhǎng)的水生植物腐爛降解形成大量懸浮物質(zhì),導(dǎo)致水體十分渾濁。

圖1 微山湖采樣點(diǎn)分布Fig.1 Distribution of sampling site in Weishan Lake

圖2 各采樣點(diǎn)處濁度Fig.2 Turbidity in 23 sampling points
HJ-1A HSI作為我國(guó)第一個(gè)高光譜衛(wèi)星傳感器,空間分辨率為100 m,具有115個(gè)波段,但由于B1~B25(中心波長(zhǎng):460.04~516.17 nm)和B106~B115(中心波長(zhǎng):877.52~951.54 nm)受噪聲干擾,僅B26~B105(中心波長(zhǎng):518.805~870.005 nm)共80個(gè)波段適用于水體濁度反演。本研究從中國(guó)資源衛(wèi)星應(yīng)用中心(http:∥www.cresda.com/CN)獲取到一景2015年10月16日的高光譜影像,對(duì)HJ-1A HSI高光譜影像進(jìn)行預(yù)處理,以經(jīng)過(guò)幾何精校正的Landsat 8影像作為基準(zhǔn)影像進(jìn)行幾何校正,利用FLAASH模型進(jìn)行大氣校正,最后提取微山湖水體區(qū)域(圖1)。
2 方法
2.1 偏最小二乘法
偏最小二乘法(PLS)是集主成分分析、典型相關(guān)分析于一體的一種多元回歸方法,其建模原理如下:自變量光譜矩陣Xn×p(x1,x2,…,xp)和因變量水質(zhì)參數(shù)矩陣Yn×q(y1,y2,…,yq)分別代表PLS模型的輸入和輸出。其中n代表建模樣本數(shù),p、q分別代表PLS建模輸入HJ-1A HSI光譜波段數(shù)和輸出水質(zhì)參數(shù)個(gè)數(shù),p≤80,q=1。Y即為建模樣點(diǎn)處水體濁度,對(duì)光譜矩陣X和濁度矩陣Y進(jìn)行標(biāo)準(zhǔn)化處理得到E0和F0,然后分別從E0和F0提取第1個(gè)主成分t1和u1,計(jì)算去除主成分信息的殘差矩陣E1和F1;然后利用E1和F1替換E0和F0提取第2個(gè)主成分,循環(huán)迭代,依次提取主成分t1,t2, …,th和u1,u2, …,uh,最佳主成分?jǐn)?shù)h采用“留一”交互驗(yàn)證法來(lái)確定,具體過(guò)程參照文獻(xiàn)[14];最后利用提取的最佳主成分構(gòu)建偏最小二乘模型。
偏最小二乘法提取的主成分既要攜帶光譜矩陣的變異信息,即不同樣點(diǎn)光譜之間的差異特征,同時(shí)也要對(duì)濁度矩陣具有很好的解釋能力,不同主成分對(duì)光譜矩陣中各個(gè)波段光譜和濁度矩陣的解釋能力計(jì)算參照文獻(xiàn)[25]。
2.2 離散粒子群算法
偏最小二乘模型若輸入波段過(guò)多,模型的復(fù)雜性和建模不確定性將會(huì)增加[13],此外輸入的光譜波段并非全部對(duì)濁度反演敏感,因此需要對(duì)PLS建模輸入波段進(jìn)行優(yōu)化,確定水體濁度PLS反演的最佳波段。離散粒子群算法(DBPSO)是KENNEDY和EBERHART[26]在粒子群算法基礎(chǔ)上提出的一種離散群體智能全局優(yōu)化算法,具有計(jì)算效率高、收斂速度快和魯棒性強(qiáng)等優(yōu)勢(shì)[27],廣泛應(yīng)用于各種離散優(yōu)化求解。DBPSO算法搜索步驟如下:
(1)初始化粒子位置Xk=(xk,1,xk,2, …,xk,m)和速度Vk=(vk,1,vk,2, …,vk,m),每個(gè)粒子位置代表一組HJ-1A HSI 高光譜反射率組合,包含p個(gè)0或1,0代表對(duì)應(yīng)的波段未被選中,1代表對(duì)應(yīng)的波段被選中。其中p為總波段數(shù),k為迭代次數(shù),初始取k=0;粒子速度用于更新粒子位置,m為粒子個(gè)數(shù),取m=20,下同。
(2)結(jié)合PLS模型,計(jì)算粒子適應(yīng)度,適應(yīng)度利用濁度PLS模型驗(yàn)證均方根誤差(Root mean square error, RMSE)和建模決定系數(shù)R2比值表示為
Fitness=RMSE/R2
(1)
其中
(2)
(3)
(3)確定個(gè)體極值Pk=(pk,1,pk,2, …,pk,m)和全局極值Pg,k=max(pk,1,pk,2, …,pk,m),個(gè)體極值代表使水體濁度PLS反演模型適應(yīng)度最小的各個(gè)粒子,全局極值代表所有粒子中使水體濁度PLS反演模型適應(yīng)度最小的粒子,根據(jù)個(gè)體極值和全局極值計(jì)算粒子搜索速度,然后根據(jù)粒子速度更新粒子位置。
vk+1,i=wvk,i+c1Rand1(pk,i-xk,i)+c2Rand2(Pg,k-xk,i)
(4)
Sig(vk+1,i)=1/(1+exp(-vk,i))
(5)
(6)
式中vk+1,i——第k+1次迭代粒子i的搜索速度vk,i——第k次迭代粒子i的搜索速度xk+1,i——第k+1次迭代時(shí)粒子i的位置c1——搜索控制因子,控制算法的局部搜索能力
c2——搜索控制因子,控制算法的全局搜索能力
w——慣性權(quán)重
Randk+1,i——0~1之間的隨機(jī)數(shù)
Sig(vk+1,i) ——粒子第i維取1的概率
由式(4)、(5)可以看出粒子越接近最優(yōu)解,vk+1,i越趨向0,此時(shí)維變化率Sig(vk+1,i)接近0.5,隨機(jī)性很高,全局搜索能力強(qiáng),但局部搜索能力差,難以收斂,為克服這一不足,改變粒子位置更新方式[28]
(7)
(8)
此時(shí),當(dāng)vk+1,i越趨向0,粒子接近最優(yōu)解時(shí)快速實(shí)現(xiàn)收斂,具有很好的局部搜索能力,但全局搜索能力較差。為了保證算法在迭代前中期具有很好的全局搜索能力,在迭代后期具有很好的局部搜索能力,將兩種粒子位置更新方式進(jìn)行組合,在迭代前中期(迭代次數(shù)小于等于最大迭代次數(shù)的70%)利用式(5)和式(6)對(duì)粒子位置進(jìn)行更新,該種更新方式記為style1,在迭代后期(迭代次數(shù)大于最大迭代次數(shù)的70%)時(shí)利用式(7)、(8)對(duì)粒子位置進(jìn)行更新,該種更新方式記為style2。此時(shí)離散粒子群算法在迭代前期具有很強(qiáng)的全局搜索能力,在迭代后期具有很強(qiáng)的局部搜索能力,可最終實(shí)現(xiàn)算法的收斂。
2.3 離散粒子群-偏最小二乘法
將上述離散粒子群和偏最小二乘算法相結(jié)合,利用離散粒子群優(yōu)化算法確定輸入偏最小二乘模型中的最佳光譜波段,構(gòu)建水體濁度DBPSO-PLS反演模型,DBPSO-PLS模型構(gòu)建詳細(xì)步驟如下:
(1)設(shè)置參數(shù)值(慣性權(quán)重w,搜索控制因子c1、c2),初始化粒子位置和速度。由于光譜波段反射率為離散數(shù)據(jù),粒子位置中用0、1表征對(duì)應(yīng)波段是否被選中,其中0代表未選中,1代表選中。
(2)結(jié)合PLS模型計(jì)算各個(gè)粒子PLS濁度反演的適應(yīng)度,確定個(gè)體極值和全局極值。根據(jù)各個(gè)粒子位置在建模數(shù)據(jù)集中分別選擇粒子選中的波段或特征變量作為輸入,水體濁度作為輸出構(gòu)建偏最小二乘模型,計(jì)算粒子適應(yīng)度,確定個(gè)體極值和全局極值。
(3)更新粒子速度,根據(jù)迭代次數(shù)選擇粒子位置更新方式。
(4)循環(huán)迭代步驟(2)、(3),直至達(dá)到最大迭代次數(shù)。迭代次數(shù)小于等于最大迭代次數(shù)的70%時(shí)根據(jù)style1進(jìn)行位置更新,迭代次數(shù)大于最大迭代次數(shù)的70%時(shí)根據(jù)style2進(jìn)行位置更新。
(5)選擇全局極值,構(gòu)建水體濁度最佳偏最小二乘模型。
水體濁度DBPSO-PLS反演模型構(gòu)建流程如圖3所示。

圖3 DBPSO-PLS反演模型構(gòu)建流程圖Fig.3 Flow chart of DBPSO-PLS retrieval model construction
2.4 精度評(píng)價(jià)
利用建模決定系數(shù)R2、相對(duì)均方根誤差rRMSE(Relative root mean square error)、平均相對(duì)誤差A(yù)RE(Average relative error)和綜合誤差CE(Comprehensive error)來(lái)衡量濁度反演模型精度,相關(guān)計(jì)算公式為
(9)
(10)
(11)
式中下角_c表示建模,_v表示驗(yàn)證。
3 結(jié)果與分析
3.1 基于HJ-1A HSI的PLS模型構(gòu)建與分析
本次試驗(yàn)共布設(shè)23個(gè)采樣點(diǎn),其中15個(gè)采樣點(diǎn)用于建模,8個(gè)采樣點(diǎn)用于驗(yàn)證模型精度,下同。選擇B26~B105(中心波長(zhǎng):518.805~870.005 nm)共80個(gè)波段反射率作為自變量Xn×p,對(duì)應(yīng)的濁度作為因變量Yn×q(n=15,p=80,q=1,下同),構(gòu)建基于原始光譜反射率的濁度偏最小二乘反演模型(OSR-PLS)。有研究認(rèn)為對(duì)光譜進(jìn)行歸一化處理能減少天氣條件對(duì)不同反射率數(shù)值的影響[29],因此對(duì)光譜進(jìn)行歸一化處理
(12)


表1 主成分對(duì)光譜矩陣和濁度矩陣的累積解釋能力Tab.1 Explanation ability for spectrum and turbidity of principal components
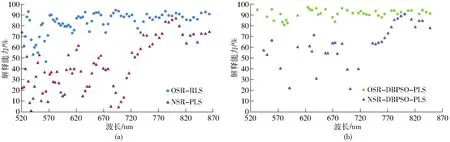
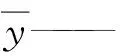
圖4 各模型主成分對(duì)不同波段光譜的解釋能力Fig.4 Explanation ability of principles extracted by models for different spectrums
其他波段的光譜(圖4a),這是因?yàn)榧t波段和近紅外波段光譜的變異信息主要由總懸浮物濃度和濁度主導(dǎo),對(duì)濁度反演較為敏感[30],所以NSR-PLS模型提取的主成分對(duì)濁度矩陣具有較高的解釋能力。

圖5 濁度PLS建模和驗(yàn)證散點(diǎn)圖Fig.5 Modeling and validation scatter plots of PLS retrieving turbidity
濁度OSR-PLS和NSR-PLS反演模型散點(diǎn)圖如圖5所示。對(duì)濁度OSR-PLS和NSR-PLS反演模型進(jìn)行精度評(píng)價(jià),評(píng)價(jià)結(jié)果見(jiàn)表2。圖5可以直觀顯示兩種模型建模和驗(yàn)證樣點(diǎn)的分布以及擬合效果,表2則是對(duì)兩種模型建模和驗(yàn)證精度的定量描述。由圖5和表2可以看出,基于原始光譜反射率的PLS模型建模擬合效果較差,建模決定系數(shù)R2只有0.50(即主成分對(duì)濁度的累積解釋能力),模型反演值和實(shí)測(cè)值分散在1∶1線兩側(cè),部分樣點(diǎn)模型濁度反演值和實(shí)測(cè)值的散點(diǎn)偏離1∶1線幅度較大,模型建模綜合誤差為46.36%,驗(yàn)證綜合誤差為54.57%,整個(gè)模型的綜合誤差達(dá)到50.46%;基于歸一化光譜反射率的PLS模型較基于原始光譜反射率的PLS模型建模精度有明顯提高,建模R2達(dá)到0.91,建模和驗(yàn)證散點(diǎn)均靠近1∶1線,建模綜合誤差為21.32%,驗(yàn)證綜合誤差為44.14%,模型綜合誤差為32.73%。對(duì)比分析可以發(fā)現(xiàn),對(duì)光譜進(jìn)行歸一化處理可以提高偏最小二乘模型反演精度。
3.2 基于HJ-1A HSI的DBPSO-PLS模型構(gòu)建與分析
偏最小二乘模型雖能綜合利用全譜波段信息,但并非全部波段反射率對(duì)水體濁度反演都敏感,直接利用全譜波段構(gòu)建水體濁度反演模型,會(huì)因部分不敏感波段的輸入限制模型精度。利用DBPSO算法對(duì)輸入PLS模型的B26~B115共80個(gè)波段進(jìn)行優(yōu)選,確定反演濁度的最佳波段,利用確定的最佳波段構(gòu)建濁度DBPSO-PLS模型;同時(shí)基于歸一化光譜反射率構(gòu)建水體濁度DBPSO-PLS模型,研究DBPSO優(yōu)選特征波段對(duì)PLS模型反演精度的影響。

表2 濁度偏最小二乘模型精度評(píng)價(jià)表Tab.2 Accuracy evaluation of PLS model retrieving turbidity based on original spectral reflectance
利用DBPSO算法分別優(yōu)選水體濁度反演的最佳原始光譜反射率波段和歸一化反射率波段。DBPSO算法中,w=1,c1=c2=2,初始化20個(gè)粒子,速度限制為[-4,4],設(shè)置迭代次數(shù)為300次。DBPSO算法優(yōu)選濁度PLS反演模型所需最佳光譜反射率波段和歸一化光譜反射率波段的適應(yīng)度函數(shù)變化如圖6所示;統(tǒng)計(jì)最終確定用于濁度PLS反演模型構(gòu)建的最佳原始光譜反射率和歸一化光譜反射率波段分布如圖7所示。分別利用優(yōu)選的最佳原始光譜反射率和歸一化光譜反射率波段構(gòu)建濁度PLS反演模型(OSR-DBPSO-PLS和NSR-DBPSO-PLS模型),模型散點(diǎn)圖如圖8所示。濁度OSR-DBPSO-PLS和NSR-DBPSO-PLS提取的最佳主成分個(gè)數(shù)分別為4個(gè)和5個(gè)(表1),主成分對(duì)DBPSO確定的光譜矩陣中各個(gè)波段光譜的累積解釋能力如圖4b所示。由表1可以看出,OSR-DBPSO-PLS模型提取的4個(gè)主成分對(duì)光譜矩陣和濁度矩陣的累積解釋能力分別為90.23%和96.44%;NSR-DBPSO-PLS模型提取的5個(gè)主成分對(duì)光譜矩陣和濁度的累積解釋能力分別為58.14%和97.35%,與OSR-PLS模型、NSR-PLS模型主成分對(duì)光譜矩陣中的各個(gè)波段光譜的解釋能力類似(圖4a、4b),但OSR-DBPSO-PLS模型和NSR-DBPSO-PLS模型提取的主成分對(duì)濁度矩陣的累積解釋能力要高于OSR-PLS和NSR-PLS模型提取的主成分,說(shuō)明DBPSO優(yōu)選后的特征波段光譜包含更多對(duì)濁度反演敏感的變異信息。

圖6 適應(yīng)度隨迭代次數(shù)變化曲線Fig.6 Changing curves of fitness value with iteration

圖7 濁度DBPSO-PLS反演模型最佳波段分布Fig.7 Optimal bands distribution as turbidity DBPSO-PLS models
由圖6可以看出,DBPSO算法優(yōu)選濁度反演的最佳波段的適應(yīng)度值在迭代前期迅速減小,在迭代后期快速漸收斂,證明DBPSO算法在前期具有很好的全局搜索能力,在后期具有較好的局部搜索能力,并能在迭代后期快速收斂,其中優(yōu)選歸一化光譜反射率波段的最終適應(yīng)度值要低于優(yōu)選原始光譜反射率波段的適應(yīng)度值。由圖7可以看出,DBPSO優(yōu)選的濁度PLS反演模型最佳反演波段主要分布于對(duì)濁度反演敏感的紅波段和近紅波段[30],DBPSO確定的最佳歸一化光譜反射率波段數(shù)為36個(gè),相比于確定的原始光譜反射率波段數(shù)有所降低;由圖8和表2可以看出,濁度OSR-DBPSO-PLS和NSR-DBPSO-PLS模型均具有較好的擬合效果,模型濁度反演值和觀測(cè)值散點(diǎn)均靠近1∶1線兩側(cè),其中濁度OSR-DBPSO-PLS模型R2為0.96,模型綜合誤差為11.66%;濁度NSR-DBPSO-PLS模型R2為0.97,模型綜合誤差為8.78%。

圖8 濁度DBPSO-PLS建模和驗(yàn)證散點(diǎn)圖Fig.8 Modeling and validation scatter plots of DBPSO-PLS retrieving turbidity
3.3 DBPSO-PLS和PLS模型對(duì)比分析
由圖8可以看出,濁度OSR-DBPSO-PLS模型精度(R2=0.96)顯著高于OSR-PLS模型(R2=0.50),且濁度PLS建模波段數(shù)由80個(gè)減少至44個(gè);濁度NSR-DBPSO-PLS模型精度(R2=0.97)同樣顯著高于NSR-PLS模型(R2=0.91),PLS建模波段個(gè)數(shù)由80個(gè)減少至36個(gè)。利用DBPSO算法結(jié)合PLS模型優(yōu)選反演濁度的最佳波段,利用最佳波段和濁度建立的PLS模型(DBPSO-PLS)在減少PLS建模所需的波段數(shù)的同時(shí),可以提高模型反演精度。
3.4 微山湖水體濁度遙感反演
基于預(yù)處理的HJ-1A HSI影像,選擇具有最小模型綜合誤差的NSR-DBPSO-PLS模型作為濁度的最佳反演模型,利用NSR-DBPSO-PLS模型反演得到微山湖水體濁度分布如圖9所示。由圖9可以看出,2015年10月微山湖水體濁度空間變異性顯著,微山湖東北方向湖區(qū)水體濁度顯著高于微山湖西南方向湖區(qū)。

圖9 微山湖水體濁度分布(2015年10月)Fig.9 Distribution of turbidity in Weishan Lake in October, 2015
微山湖水生植物種類眾多,其中光葉眼子菜和菹草是其中分布最多的兩種植物,除此之外還分布有較多的篦齒眼子菜和穗花狐尾藻等,其中菹草在初春時(shí)快速繁殖生長(zhǎng),在初夏之前迅速枯黃腐爛沉入湖底,而光葉眼子菜、篦齒眼子菜和穗花狐尾藻初春時(shí)開始復(fù)蘇,在夏末生長(zhǎng)得最為茂盛,此后開始逐漸衰敗;在此次試驗(yàn)之前,課題組曾于2014年7月22—23日、2014年8月29日、2014年11月17日、2015年4月6—9日、2015年5月15—16日和2016年6月13日在微山湖進(jìn)行過(guò)6次實(shí)地采樣,采樣足跡遍布整個(gè)湖區(qū),采樣過(guò)程發(fā)現(xiàn)穗花狐尾藻主要分布于微山湖東北方向湖區(qū),而光葉眼子菜、篦齒眼子菜主要生長(zhǎng)于西南方向湖區(qū)。本次試驗(yàn)時(shí),穗花狐尾藻已經(jīng)逐漸凋亡腐爛生成大量殘?bào)w(圖10a),而光葉眼子菜(圖10b)、篦齒眼子菜(圖10c)依舊長(zhǎng)勢(shì)良好,所以穗花狐尾藻主要生長(zhǎng)的東北方向湖區(qū)水體濁度偏高,此外該區(qū)域較為開闊,風(fēng)浪作用下的底泥再懸浮對(duì)濁度也有一定的貢獻(xiàn),而光葉眼子菜和篦齒眼子菜生長(zhǎng)的西南方向湖區(qū)由于沉水植物對(duì)水體起著過(guò)濾、吸附、消浪和抑制底泥上浮的作用[31],沉水植物的存在有利于水體濁度的降低[32],處于生長(zhǎng)期的沉水植物生長(zhǎng)區(qū)域水質(zhì)整體較好,濁度較低

圖10 微山湖3種主要水草生長(zhǎng)狀態(tài)(2015年10月)Fig.10 Growth of three major aquatic plants in Weishan Lake in October, 2015
(圖10b、10c),但沉水植物后期死亡分解產(chǎn)生的殘?bào)w會(huì)增加水體濁度(圖10a),NSR-DBPSO-PLS模型濁度反演結(jié)果符合實(shí)際。
4 結(jié)論
(1)基于歸一化光譜反射率的濁度PLS模型精度(NSR-PLS,R2=0.91)顯著高于基于原始光譜反射率的濁度PLS模型(OSR-PLS,R2=0.50),對(duì)波段進(jìn)行歸一化處理能提高水體濁度PLS模型反演精度。
(2)利用DBPSO算法優(yōu)選濁度PLS模型反演的特征波段,在此基礎(chǔ)上構(gòu)建的基于原始光譜反射率的PLS模型精度(OSR-DBPSO-PLS,R2=0.96)和基于歸一化光譜反射率的PLS模型精度(NSR-DBPSO-PLS,R2=0.97)顯著高于直接利用全譜波段構(gòu)建的OSR-PLS和NSR-PLS模型,建模波段數(shù)由80個(gè)分別減少至44個(gè)和36個(gè),DBPSO-PLS模型在減少PLS建模所需的波段數(shù)的同時(shí)可以提高濁度PLS模型反演精度。
(3)基于歸一化光譜反射率的濁度NSR-DBPSO-PLS反演模型具有最高精度(R2=0.97),利用該模型反演微山湖水體濁度符合實(shí)際,基于衛(wèi)星高光譜數(shù)據(jù)的DBPSO-PLS模型在水質(zhì)遙感領(lǐng)域具有應(yīng)用潛力。
(4)微山湖中處于生長(zhǎng)期的沉水植物有利于降低水體濁度,其生長(zhǎng)區(qū)域水質(zhì)整體較好,濁度較低,但沉水植物死亡分解產(chǎn)生的殘?bào)w會(huì)增加水體濁度。
1 MOSS B. Cogs in the endless machine: lakes, climate change and nutrient cycles: a review [J]. Science of the Total Environment, 2012, 434(18):130-142.
2 葛文杰, 趙春江. 農(nóng)業(yè)物聯(lián)網(wǎng)研究與應(yīng)用現(xiàn)狀及發(fā)展對(duì)策研究[J/OL]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2014, 45(7):222-230. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140735&journal_id=jcsam.DOI:10.6041/j.issn.10001298.2014.07.035. GE Wenjie, ZHAO Chunjiang. State of the art and developing strategies of agricultural internet of things [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(7):222-230. (in Chinese)
3 鐘珍梅, 黃毅斌, 李艷春,等. 我國(guó)農(nóng)業(yè)面源污染現(xiàn)狀及草類植物在污染治理中的應(yīng)用[J]. 草業(yè)科學(xué), 2017, 34(2):428-435. ZHONG Zhenmei, HUANG Yibin, LI Yanchun, et al. Current state of agricultural environmental pollution and herbaceous plants used in controlling pollution in China [J]. Pratacultural Science, 2017, 34(2):428-435.(in Chinese)
4 PALMER S C J, KUTSER T, HUNTER P D. Remote sensing of inland waters: challenges, progress and future directions [J]. Remote Sensing of Environment, 2015, 157:1-8.
5 CHEN Z, HU C, MULLER-KARGER F. Monitoring turbidity in Tampa Bay using MODIS/Aqua 250-m imagery [J]. Remote Sensing of Environment, 2007, 109(2):207-220.
6 GüTTLER F N, NICULESCU S, GOHIN F. Turbidity retrieval and monitoring of Danube Delta waters using multi-sensor optical remote sensing data: an integrated view from the delta plain lakes to the western-northwestern Black Sea coastal zone [J]. Remote Sensing of Environment, 2013, 132(6):86-101.
7 馮奇, 程學(xué)軍, 沈欣, 等. 利用Landsat-8 OLI進(jìn)行漢江下游水體濁度反演[J]. 武漢大學(xué)學(xué)報(bào):信息科學(xué)版, 2017,42(5):643-647. FENG Qi, CHENG Xuejun, SHEN Xin, et al. Performance assessment of Landsat-8 OLI image for inland riverine turbidity estimation: a case study on Hanjiang River [J]. Gematics and Information Science of Wuhan University, 2017,42(5):643-647.(in Chinese)
8 BUSTAMANTE J, PACIOS F, DAZ-DELGADO R, et al. Predictive models of turbidity and water depth in the Doana marshes using Landsat TM and ETM+ images[J]. Journal of Environmental Management, 2009, 90(7):2219-2225.
9 NECHAD B, RUDDICK K G, NEUKERMANS G. Calibration and validation of a generic multisensor algorithm for mapping of turbidity in coastal waters[C]∥Proceedings of SPIE on Remote Sensing of the Ocean, Sea Ice, and Large Water Regions, 2009: 74730H-1-11.
10 GOHIN F. Annual cycles of chlorophyll-a, non-algal suspended particulate matter, and turbidity observed from space and in-situ in coastal waters [J]. Ocean Science, 2011, 7(5):705-732.
11 DOGLIOTTI A I, RUDDICK K G, NECHAD B, et al. A single algorithm to retrieve turbidity from remotely-sensed data in all coastal and estuarine waters [J]. Remote Sensing of Environment, 2015, 156:157-168.
12 SONG K, LU D, LI L, et al. Remote sensing of chlorophyll-a, concentration for drinking water source using genetic algorithms (GA)-partial least square (PLS) modeling [J]. Ecological Informatics, 2012, 10(7):25-36.
13 褚小立, 田高友, 袁洪福, 等. 小波變換結(jié)合多維偏最小二乘方法用于近紅外光譜定量分析[J]. 分析化學(xué), 2006, 34(增刊1):175-178. CHU Xiaoli, TIAN Gaoyou, YUAN Hongfu, et al. Quantitative analysis of near infrared spectroscopy by combination of wavelet analysis and N-way partial least square [J]. Chinese Journal of Analytical Chemistry, 2006, 34(Supp.1):175-178. (in Chinese)
14 ALI K A, ORTIZ J D. Multivariate approach for chlorophyll-a and suspended matter retrievals in case II type waters using hyperspectral data [J]. Hydrological Sciences Journal, 2016, 61(1): 200-213.
15 劉忠華, 李云梅, 呂恒,等. 基于偏最小二乘法的巢湖懸浮物濃度反演[J]. 湖泊科學(xué), 2011, 23(3):357-365. LIU Zhonghua, LI Yunmei, Lü Heng, et al. Inversion of suspended matter concentration in Lake Chaohu based on partial least-squares regression [J]. Journal of Lake Sciences, 2011, 23(3):357-365. (in Chinese)
16 楊燕明, 劉貞文, 陳本清, 等. 用偏最小二乘法反演二類水體的水色要素[J]. 遙感學(xué)報(bào), 2005, 9(2):123-130. YANG Yanming, LIU Zhenwen, CHEN Benqing, et al. Retrieval of oceanic color constituents from case II water reflectance by partial squares regression [J]. Journal of Remote of Sensing, 2005, 9(2):123-130. (in Chinese)
17 徐京萍, 張柏, 宋開山, 等. 用偏最小二乘法提取石頭口門水庫(kù)水色信息[J]. 中國(guó)科學(xué)院大學(xué)學(xué)報(bào), 2007, 24(6):814-819. XU Jingping, ZHANG Bai, SONG Kaishan, et al. Water information extraction of Reservoir Shitoukoumen based on partial least squares regression [J]. Journal of the Graduate School of the Chinese Academy of Sciences, 2007, 24(6):814-819. (in Chinese)
18 ROBERTSON A L. Using a partial least squares (PLS) method for estimating cyanobacterial pigments in eutrophic inland waters [C]∥Proceedings of SPIE on Remote Sensing and Modeling of Ecosystems for Sustainability, 2009VI:745408-1-12.
19 RYAN K, ALI K. Application of a partial least-squares regression model to retrieve chlorophyll-a [J]. Ocean Science Journal, 2016, 51(2): 209-221.
20 XU J, ZHANG B, LI F, et al. Retrieval of total suspended matters using field spectral data in Shitoukoumen Reservoir, Jilin Province, Northeast China [J]. Chinese Geographical Science, 2009, 19(1): 77-82.
21 LU D M, SONG K S, LI L, et al. Training a GA-PLS model for chl-a concentration estimation over inland lake in northeast China [J]. Procedia Environmental Sciences, 2010, 2(1):842-851.
22 SONG K, LI L, LI S, et al. Hyperspectral retrieval of phycocyanin in potable water sources using genetic algorithm-partial least squares (GA-PLS) modeling [J]. International Journal of Applied Earth Observation & Geoinformation, 2012, 18(18):368-385.
23 SONG K, LI L, TEDESCO L P, et al. Hyperspectral determination of eutrophication for a water supply source via genetic algorithm-partial least squares (GA-PLS) modeling [J]. Science of the Total Environment, 2012, 426(2):220-232.
24 SONG K, LI L, TEDESCO L P, et al. Remote estimation of chlorophyll-a in turbid inland waters: three-band model versus GA-PLS model [J]. Remote Sensing of Environment, 2013, 136:342-357.
25 葛彥鵬. 基于偏最小二乘法的火電機(jī)組關(guān)鍵參數(shù)預(yù)測(cè)模型研究[D].北京:華北電力大學(xué), 2013. GE Yanpeng. Research on the key parameters prediction of thermal power units based on partial least squares methods [D]. Beijing:North China Electric Power University, 2013.(in Chinese)
26 KENNEDY J, EBERHART R C. A discrete binary version of the particle swarm algorithm[C]∥Proceedings of the World Multiconference on Systemics, Cybernetics and Informatics, 1997: 4104-4108.
27 沈林成, 霍霄華, 牛軼峰. 離散粒子群優(yōu)化算法研究現(xiàn)狀綜述[J]. 系統(tǒng)工程與電子技術(shù), 2008, 30(10):1986-1990. SHEN Lincheng, HUO Xiaohua, NIU Yifeng. Survey of discrete particle swarm optimization algorithm [J]. Systems Engineering and Electronic, 2008, 30(10):1986-1990. (in Chinese)
28 劉建華, 楊榮華, 孫水華. 離散二進(jìn)制粒子群算法分析[J]. 南京大學(xué)學(xué)報(bào):自然科學(xué)版, 2011, 47(5):504-514. LIU Jianhua, YANG Ronghua, SUN Shuihua. The analysis of binary particle swarm optimization [J]. Journal of Nanjing University: Natural Sciences, 2011, 47(5):504-514. (in Chinese)
29 鞏彩蘭, 尹球, 匡定波. 黃浦江水質(zhì)指標(biāo)與反射光譜特征的關(guān)系分析[J]. 遙感學(xué)報(bào), 2006, 10(6):910-916. GONG Cailan, YIN Qiu, KUANG Dingbo. Correlations between water quality indexes and reflectance spectra of Huangpujiang River [J]. Journal of Remote Sensing, 2006, 10(6):910-916. (in Chinese)
30 BUSTAMANTE J, PACIOS F, DAZ-DELGADO R, et al. Predictive models of turbidity and water depth in the Doana marshes using Landsat TM and ETM+ images[J]. Journal of Environmental Management, 2009, 90(7):2219-2225.
31 ZHANG Y, SHI K, LIU X, et al. Lake topography and wind waves determining seasonal-spatial dynamics of total suspended matter in turbid Lake Taihu, China: assessment using long-term high-resolution MERIS Data [J]. PLOS ONE, 2014, 9(5):e98055.
32 龐翠超, 吳時(shí)強(qiáng), 賴錫軍. 沉水植被降低水體濁度的機(jī)理研究[J] 環(huán)境科學(xué)研究,2014,7(5): 498-504. PANG Cuichao, WU Shiqiang, LAI Xijun.Water flow with submerged vegetation and its effect on water turbidity [J].Research of Environmental Sciences,2014,7(5): 498-504.(in Chinese)
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
