基于雙控制器的人形機器人系統
2018-03-02 02:06:18陳梓瀚杜玉曉李步恒賴昱凡柯佳穎曾田瑞
自動化與信息工程 2018年5期
陳梓瀚 杜玉曉 李步恒 賴昱凡 柯佳穎 曾田瑞
?
基于雙控制器的人形機器人系統
陳梓瀚 杜玉曉 李步恒 賴昱凡 柯佳穎 曾田瑞
(廣東工業大學自動化學院)
針對當前人形機器人在實際生活中的應用和發展前景,設計一個軟硬件高度模塊化的人形機器人系統。基于嵌入式工業控制板和STM32雙控制器結構有效地控制機器人執行相應的指令,同時集成在機器人上的各種傳感器均能迅速反饋數據;此外機器人移植了Linux系統,同時使用ROS次級操作系統,為人形機器人搭建高效的仿真平臺,優化了算法任務的運行環境。仿真數據和實驗結果表明:此系統設計合理,可實現機器人高效運行。
人形機器人系統;模塊化;雙控制器
0 引言
近年來,采用舵機作為機器人驅動模塊的人形機器人受到關注,且這類機器人大都采用集中控制的方式[1]。但集中控制無法根據環境的變化來實時改變步態,使得機器人難以適應復雜的使用場景。
針對以上情況,本文提出人形機器人系統,采用雙控制器的硬件結構。主控制器負責圖像處理和算法運算;副控制器作為舵機控制器和麥克風、蜂鳴器等外設連接器,指導舵機驅動人形機器人完成相應動作并實現交互。兩者分工合作,提高了人形機器人控制器的工作效率,并具備可剪裁的特點。同時,在軟件設計中,本文選擇移植開源的Linux系統,并采用ROS次級操作系統搭建機器人仿真平臺,降低機器人算法研究和移植難度,方便機器人其他功能的后續研發。
1 硬件框架設計
為實現人形機器人雙足平衡、圖像處理等功能,系統須具備高效的運動控制模塊,高精度的傳感器和高運算速度的處理器。此外,為保證機器人的續航時間,設計時應盡量減少冗余,以降低整體功耗。
驅動模塊由人形機器人的各個關節構成,其任務是驅動各關節正常運轉,使指令能夠穩定執行。為此,本文采用數字舵機作為關節驅動,確保人形機器人運動的靈活性與穩定性。
傳感器模塊用于采集機器人周圍的環境信息,并將采集的數據實時、準確地反饋給控制系統[2]。信息反饋及時、精度高有利于機器人調整姿態適應環境[3]。為此,本文采用羅技C905 200萬像素免驅攝像頭、IMS-C20B壓力傳感器和DS18B20溫度傳感器等采集環境信息。
控制模塊需實時收集處理傳感器的信息,并根據給定的指令驅動機器人。本文采用PC104作為主控制器,負責算法計算和多任務處理,如步態算法和圖像識別算法等,并指導副控制器執行相應的動作;采用STM32多功能主板作為副控制器,主要用于采集陀螺儀、加速度計等傳感器數據,同時完成副控制器與舵機之間的通信和驅動舵機的功能。人形機器人系統架構如圖1所示。
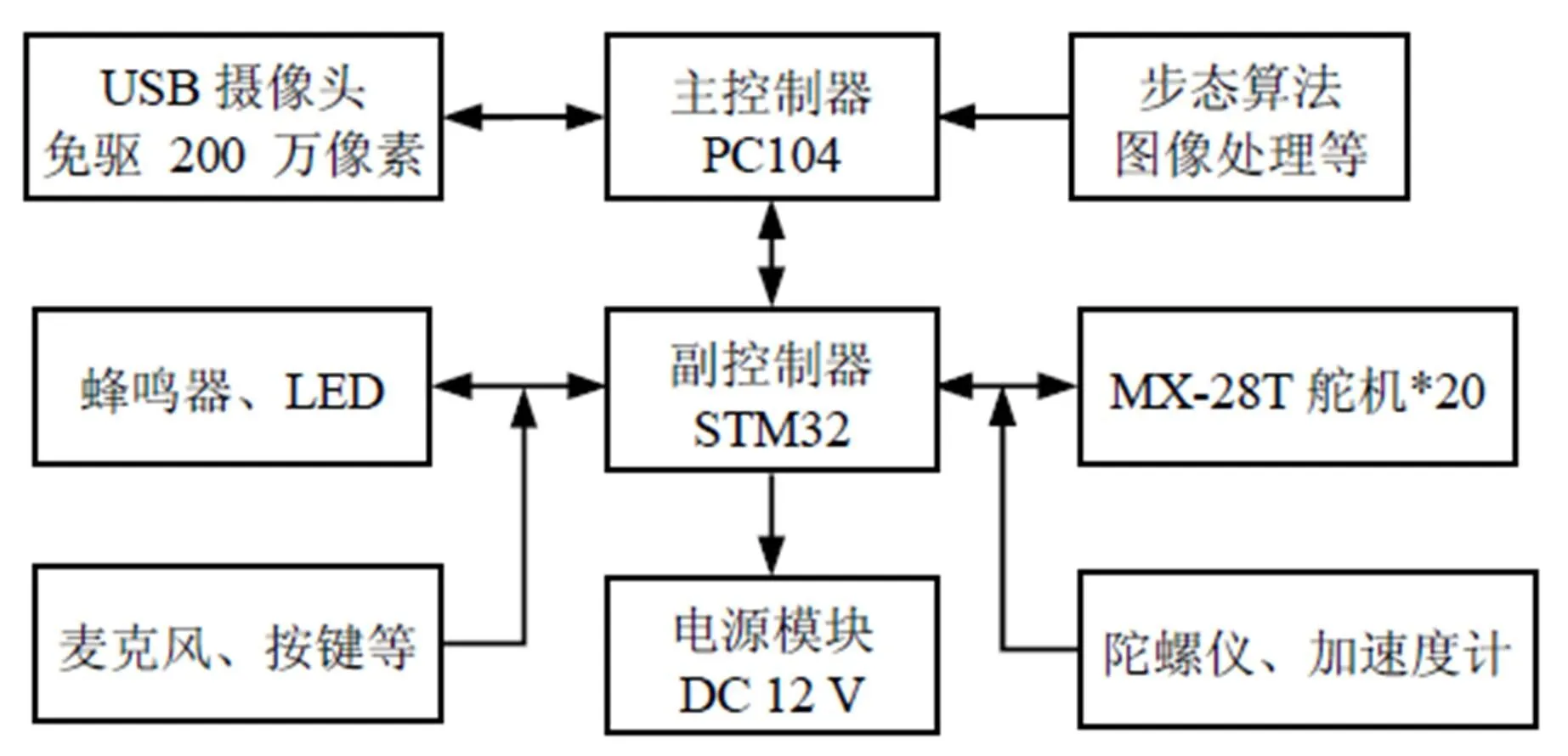
圖1 人形機器人系統架構
2 硬件系統模塊設計
2.1 雙控制器控制流程
副控制器STM32的功能是及時收集傳感器數據,同時驅動軀體的各關節運動。副控制器和主控制器通過串口收發傳感器采集到的數據;主控制器根據數據進行步態和圖像運算,使機器人對特定環境做出及時的處理,進而實現機器人的穩定運作。
2.2 功能模塊設計
本系統在副控制器上添加了供電模塊、通信模塊和視覺模塊等,以確保系統穩定。
2.2.1 電源電路模塊
本系統各主要模塊以及芯片所需電壓如表1所示。
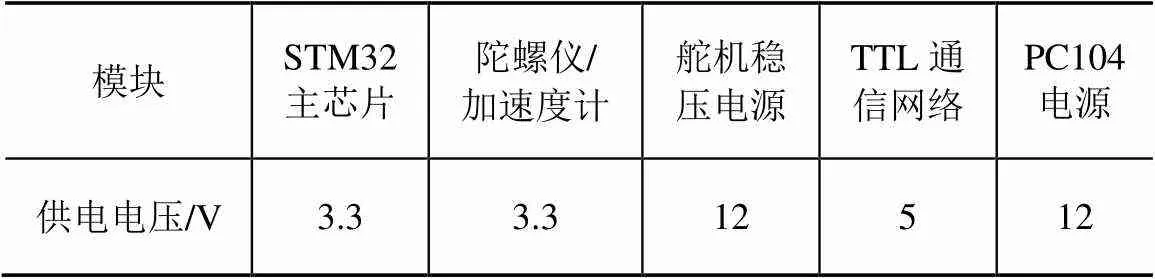
表1 人形機器人各模塊的電源電壓
由表1可知:機器人正常工作需要3.3 V,5 V和12 V的3種電壓。機器人采用12.1 V的鋰電池供電;同時使用LM78M05芯片降壓,得到5 V電源電壓;5 V電壓再通過EZ1117芯片降壓至3.3 V。其中5 V供電電路如圖2所示,3.3 V供電電路如圖3所示。
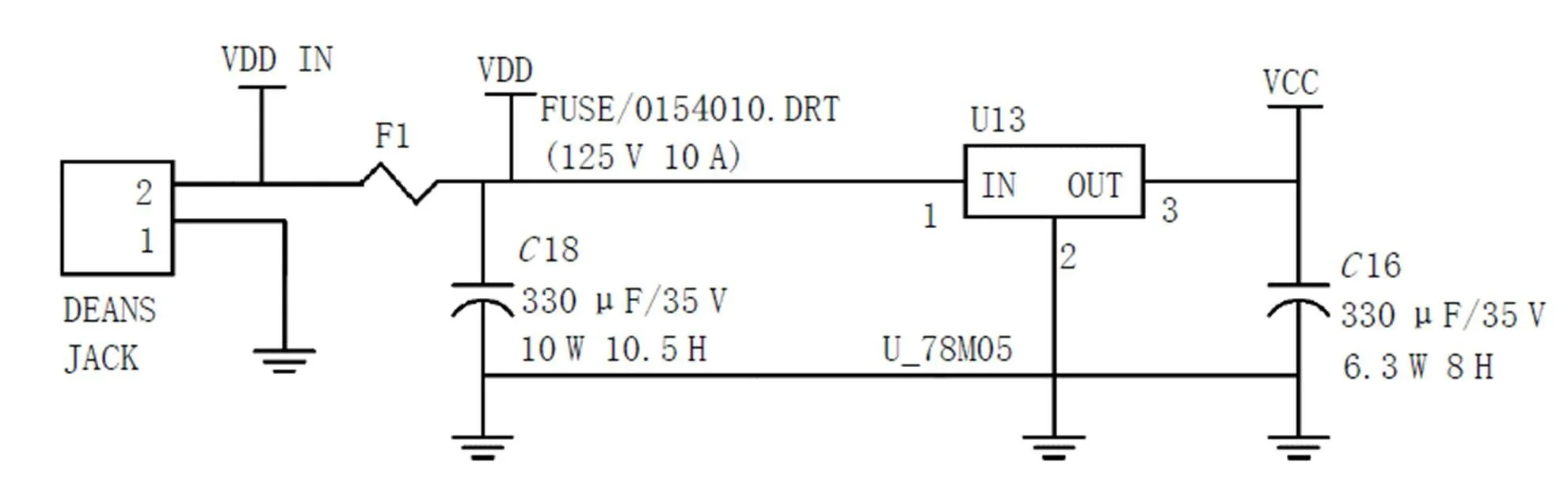
圖2 5 V供電電路圖
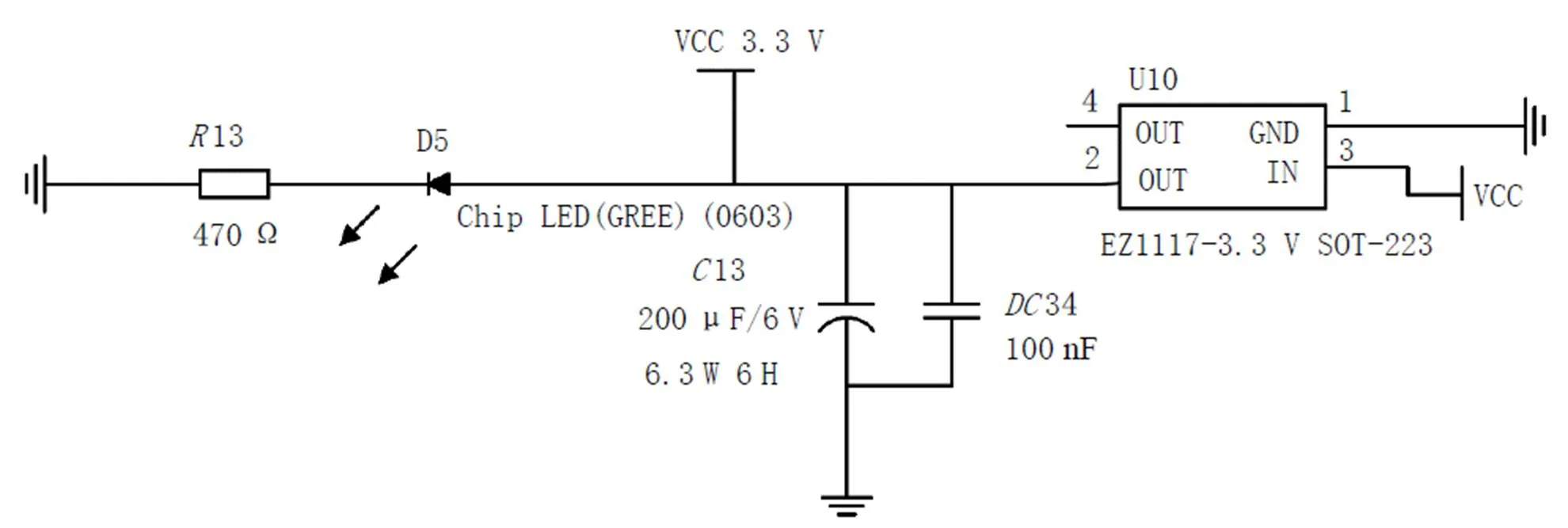
圖3 3.3 V供電電路圖
2.2.2 串口通信模塊
火星上有湖泊,被認為是實現火星移民的又一突破性發現。當然,在火星上發現的這個地下湖泊,僅僅是火星快車號自己的探測結果,還不能最后給出定論。這是因為科學發現需要遵循“交叉證明”的原則。也就是說,除了火星快車號發現了這個湖泊之外,還要有其他途徑也能發現這個火星湖泊,才可以最終給出確定的結論。
串口通信模塊分為與主控制器通信模塊、與機器人軀體20個舵機通信模塊2部分。
1) 與主控制器通信模塊:采用FT232作為USB轉串口芯片,完成與主控制器通信功能。副控制器與主控制器的通信電路圖如圖4所示。
2) 與舵機通信模塊:舵機由TTL電平驅動,其通信電路如圖5所示。其中,DXL_RXD表示舵機數據的接收端口;DXL_TXD表示舵機數據的發送端口;數據通過TTL_DATA傳送到副控制器。同時增設一個使能位來區別同一時刻數據的發送和接收狀態。
2.2.3 姿態測量模塊
本系統采用LIS331DLH陀螺儀,L3G4200D加速度計測量人形機器人姿態信息,電路如圖6所示。LIS331DLH、L3G4200D均使用SPI協議,副控制器使用該協議收集陀螺儀和加速度計采集的數據,并通過串口發送給主控制器。
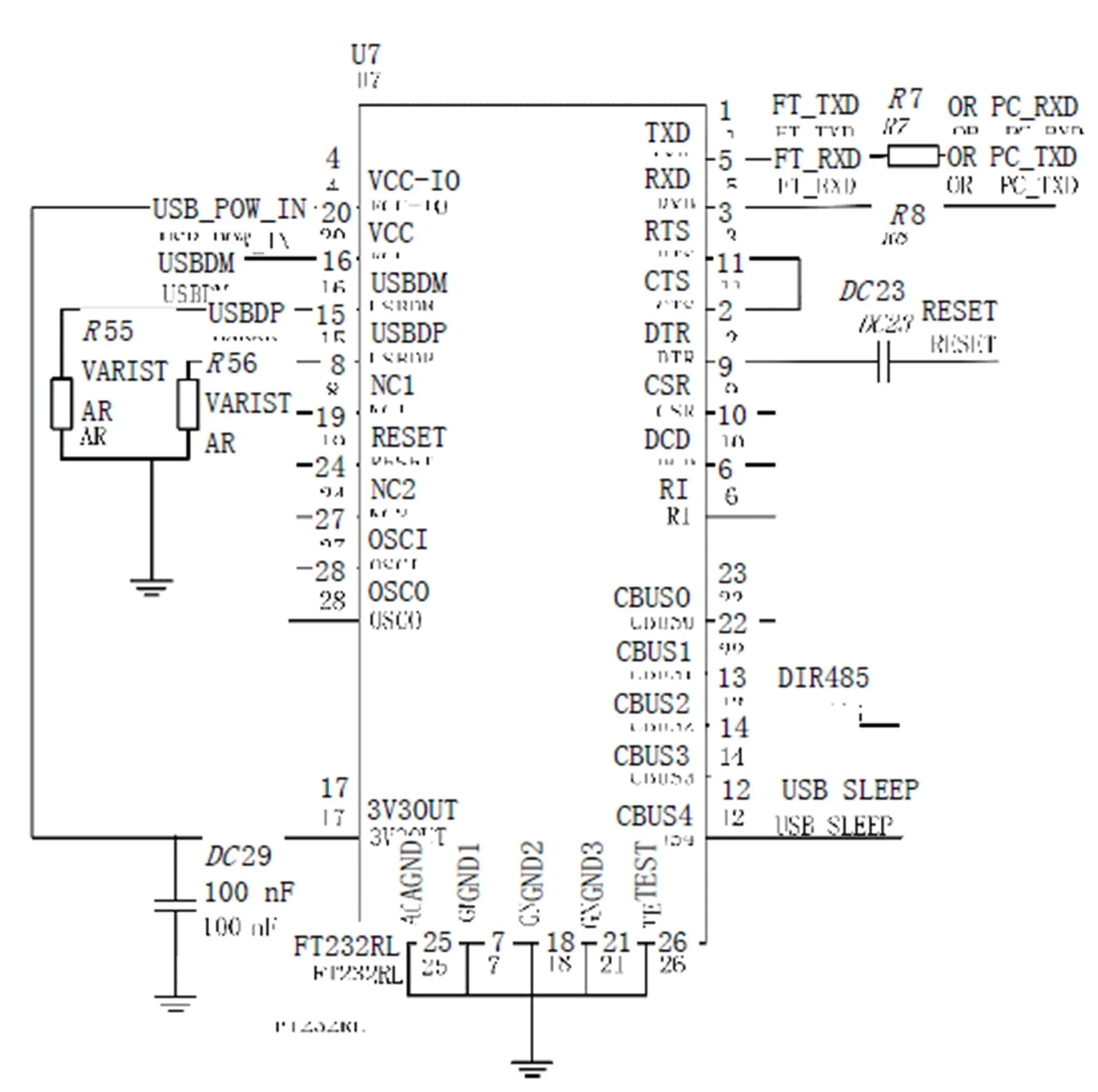
圖4 主副控制器通信電路圖

圖5 副控制器與舵機通信電路圖
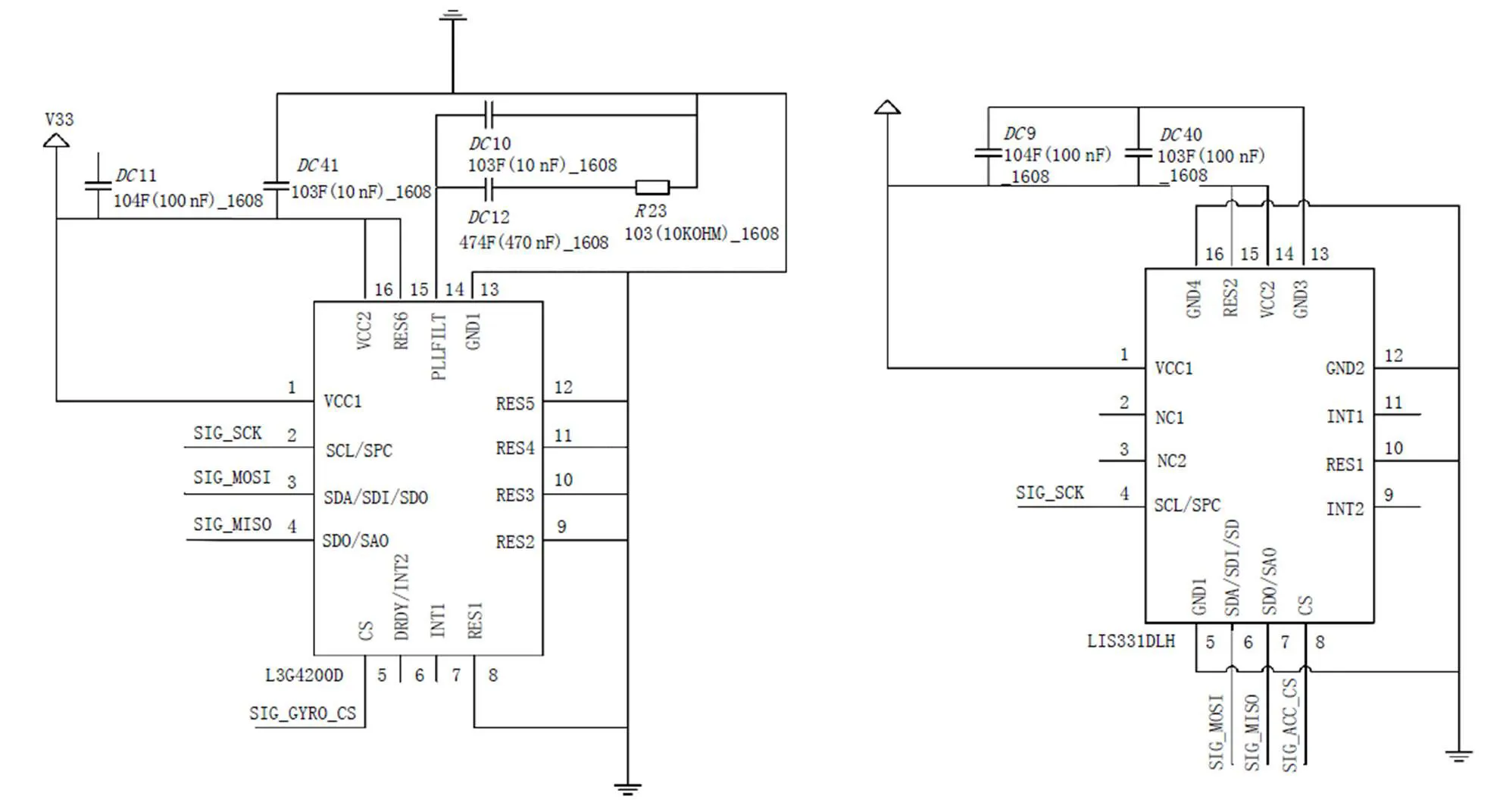
圖6 陀螺儀與加速度計電路圖
3 軟件系統模塊設計
主控制器相當于機器人的大腦,用于處理繁多復雜的任務,因此需要一個調度任務系統。在主控制器移植操作系統方便資源調度,降低后續功能開發的難度[2]。
本文搭載Linux操作系統。該系統的設計以網絡為核心,性能穩定;其內核的訂制性很高,最小大約為100 kB;兼容性好,大大減少程序開發和移植可能遇到的問題[3]。
綜上所述,本設計在主控器上移植了Ubuntu LTS系統,并搭載了ROS次級操作系統,幫助機器人上層各項復雜功能的快速開發。
4 實驗測試結果及分析
對本文提出的人形機器人系統進行測試。在實驗室環境中用電壓計、示波器等對系統各部分進行測試,并讓機器人在平地環境行走,將陀螺儀和加速度計的數據導入電腦。
4.1 電源電路模塊
通過電壓計分別測量各個模塊的實際電壓,測得電池電壓為11.8 V、EZ1117芯片引腳2電壓為3.3 V、78M05芯片引腳3電壓為5 V。此外,測得主控制芯片、陀螺儀和加速度計的工作電壓均符合額定電壓。
4.2 姿態測量模塊
陀螺儀和加速度計的位置圖和實際指向如圖7所示。觀察人形機器人前行和跌倒時陀螺儀和加速度計的數據,陀螺儀、方向輸出如圖8所示。在前100 s內,機器人向前行走,機器人在和方向有一定的角速度,機器人左右晃動;而100 s后,機器人靜止,和方向的輸出均為零,陀螺儀靜止,而后機器人又繼續前行。
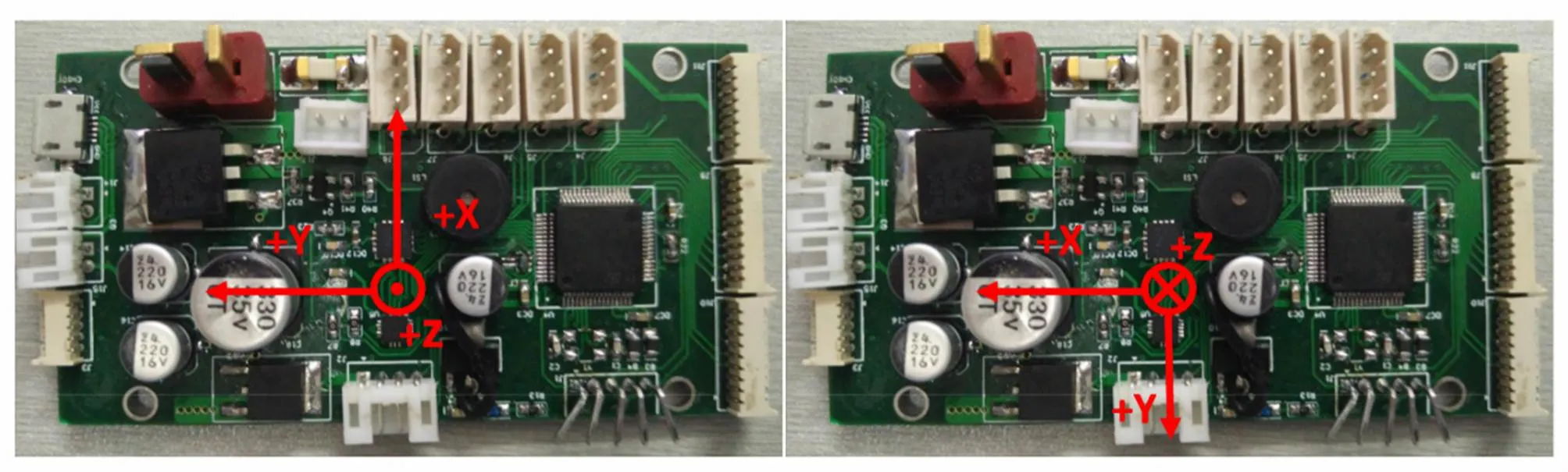
圖7 陀螺儀和加速度計的位置圖和實際指向

圖8 機器人前進時陀螺儀X、Y方向的輸出
5 結語
針對當前人形機器人軟硬件設計復雜、模塊復用性不高等問題,本文應用模塊化設計理念,搭建一個基于雙控制器的人形機器人系統。硬件選取多方面考慮人形機器人的功耗、成本等因素,使用性價比較高的芯片和模塊,簡化后續的固件設計;統一采用串口通信作為機器人的唯一通信協議;軟件上采用ROS的仿真設計,增強了開發的方便性。
[1] 伊強,陳懇,劉莉,等.小型仿人機器人THBIP-II的研制與開發[J].機器人,2009,31(6):586-593.
[2] Akhtaruzzaman M, Shafie A A. Evolution of humanoid robot and contribution of various countries in advancing the research and development of the platform[C].Control Automation and Systems (ICCAS),2010 International Conference on. IEEE, 2010: 1021-1028.
[3] 王強.基于AVR單片機的雙足機器人控制系統設計[D].北京:華北電力大學,2012.
Humanoid Robot System Based on Dual Controller
Chen Zihan Du Yuxiao Li Buheng Lai Yufan Ke Jiaying Zeng Tianrui
(School of Automation,Guangdong University of Technology)
With the development of the world industrialization, humanoid robot has attracted the attention of various industries. Aiming at the application of humanoid robot in reality, this paper designs a system scheme of humanoid robot with software and hardware. The dual controller structure based on embedded industrial control board and STM32 can well control the robot to perform the corresponding actions, and all kinds of sensors integrated in the humanoid robot can feedback the parameters correctly .In addition, this project has transplanted Linux operating system and ROS secondary operating system on the software, built humanoid robot simulation platform, and provided a good environment for the subsequent operation of complex algorithm tasks .From the experimental data, it can be seen that this scheme is reasonable and feasible, can predetermine the function, and is a relatively mature humanoid robot system.
Humanoid Robot System; Scalable; Dual Controller
陳梓瀚,男,1997年生,在讀本科生,主要研究方向:自動控制、計算機網絡技術等。E-mail: czih995@126.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17