風速不確定度的分析和計算
2018-03-04 12:20:24馬友林
風能 2018年8期
文 | 馬友林
本文主要描述了IEC 61400-12-1 Annex D 和Annex E中不確定度(Uncertainty)相關部分的處理計算,主要包含以下三個部分:
(1)不確定度的基本概念。
(2)IEC 61400-12-1不確定度介紹。
(3)IEC 61400-12-1風速測試不確定度。
本文主要遵循以下標準的相關內容(下稱“標準”):IEC 61400-12-1:2017, Wind turbine-Part 12-1: Power performance measurements of electricity producing wind turbines。
不確定度的基本概念
測量不確定度意指根據所用到的信息,表征賦予被測量值分散性的非負參數。測試不確定度是基于被測量的概率分布而估計的離散程度,用標準差表示的不確定度又被稱為標準不確定度。在某些情況下需要對不確定度進行更可靠的估計,即對標準不確定度乘以一個包含因子k得到擴展不確定度。
不確定度分為A、B兩類,它們的本質是一樣的,其區別在于獲取被測量概率分布的方式不同;不能簡單地用“系統誤差”和“隨機誤差”進行區分。
A類不確定度:其概率分布是直接的,通過多次測量的方式得到的。
B類不確定度:其概率分布是間接的,通過數學模型、假定等方式得到的。
將各不確定度分量進行合并,可以得到合成不確定度。
測量模型為:
敏感系數為:
如果各分量不相關:
式中:
U(xi)為不確定度分量。
如果分量相關:

[注:不確定度的概念和計算主要參考以下標準:JJF1059.1-2012、JCGM 100: 2018 (GUM1995 with minor corrections)]。
風速不確定度
一、概述
在測試中需要使用傳感器采集風速相關數據,針對不同傳感器,其不確定度的計算也有所差異。一般在風電測試中,主要采用安裝在測風塔上的風杯式風速計和遙感測風設備進行風信息的采集和測量。
關于各個不確定度分量,標準中已經有相關規定。表1為IEC61400-12-1,2017版中附錄D所列的不確定度分量。
由表1可知,IEC61400-12-1功率測試中考慮的不確定度可以分為圖1所示的幾類。

圖1 風速不確定度的分類
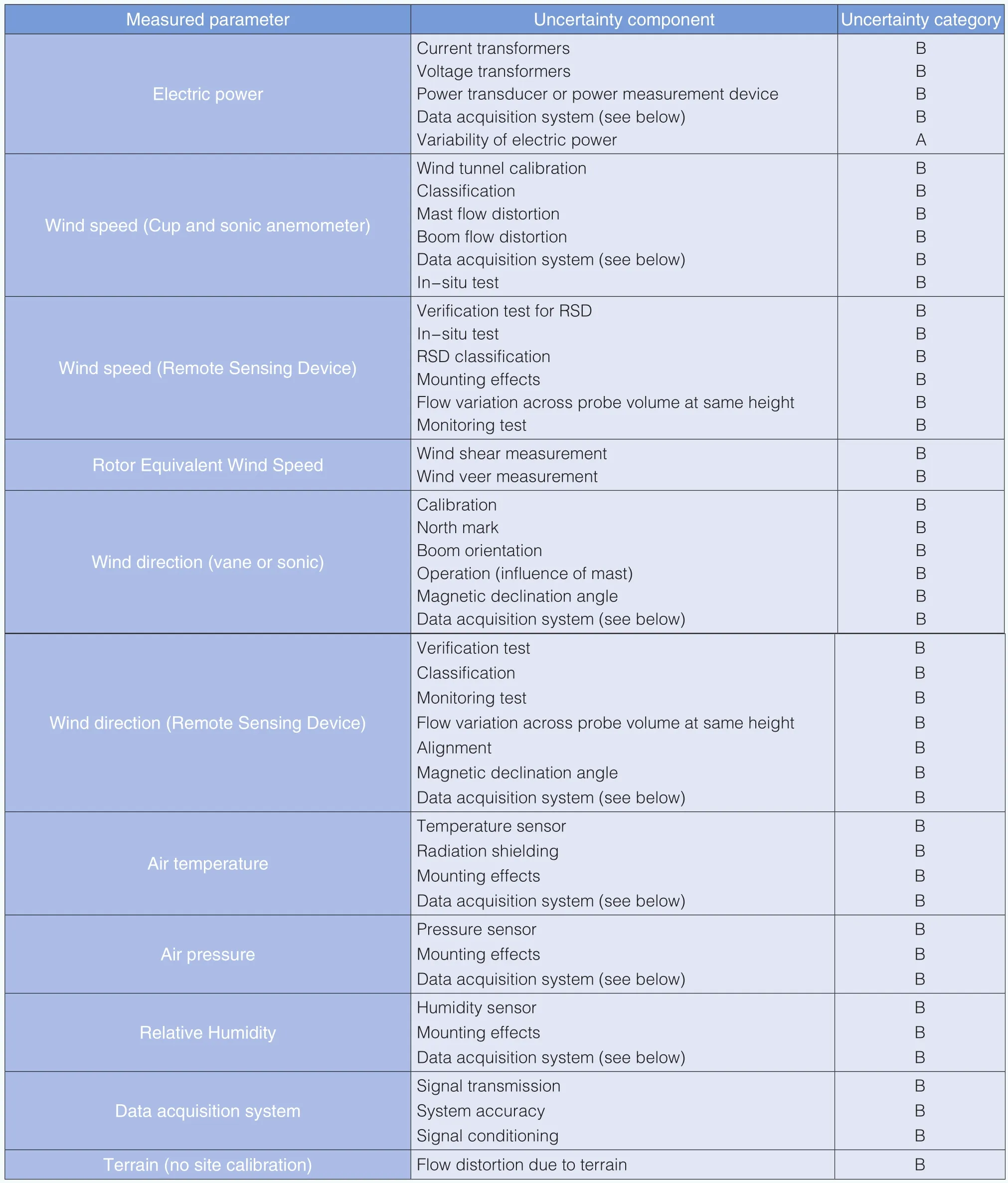
表1 數據篩選原則
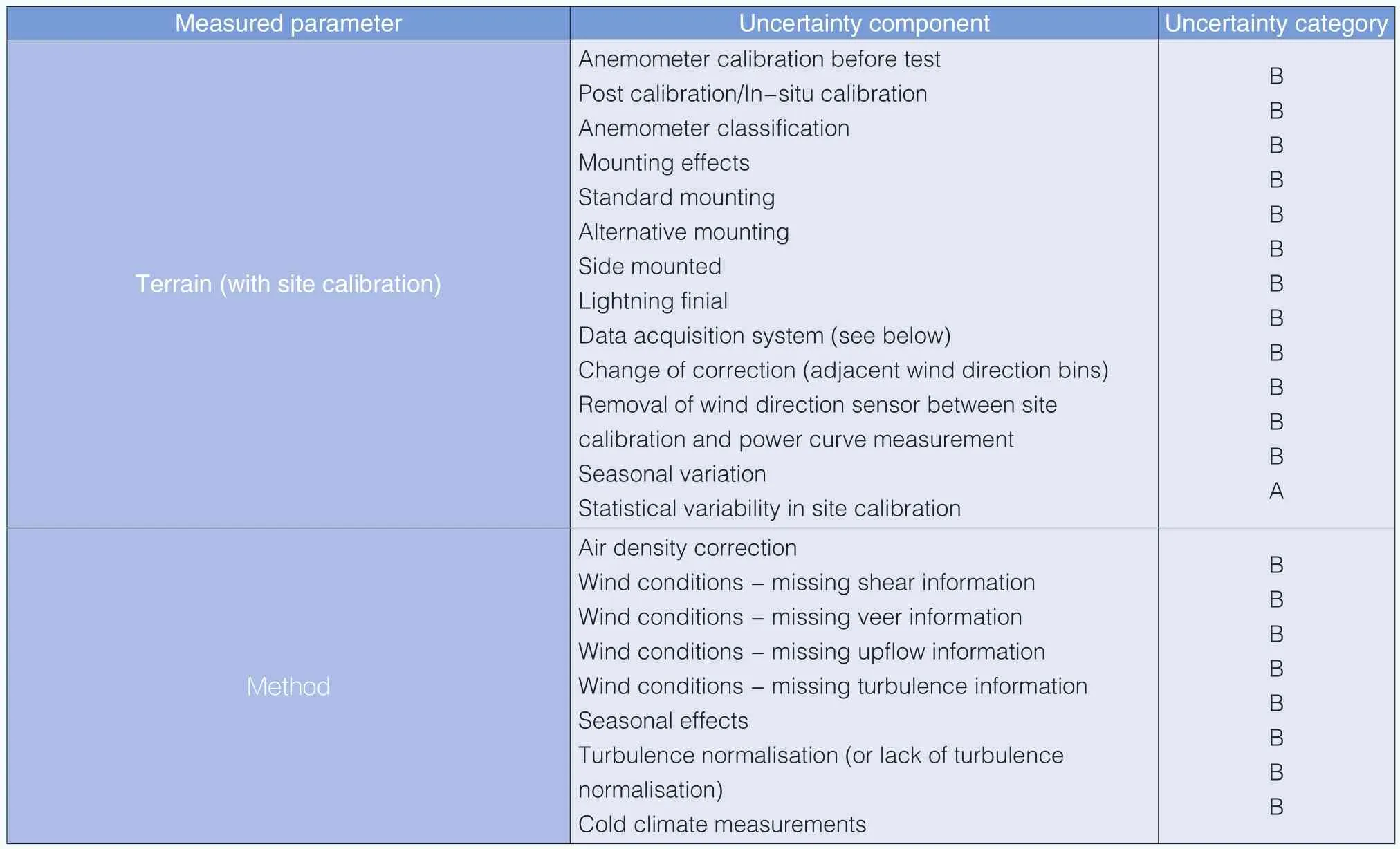
Measured parameter Uncertainty component Uncertainty category Terrain (with site calibration)Anemometer calibration before test Post calibration/In-situ calibration Anemometer classification Mounting effects Standard mounting Alternative mounting Side mounted Lightning finial Data acquisition system (see below)Change of correction (adjacent wind direction bins)Removal of wind direction sensor between site calibration and power curve measurement Seasonal variation Statistical variability in site calibration BBBBBBBBBBBBA Method Air density correction Wind conditions - missing shear information Wind conditions - missing veer information Wind conditions - missing upflow information Wind conditions - missing turbulence information Seasonal effects Turbulence normalisation (or lack of turbulence normalisation)Cold climate measurements BBBBBBBB
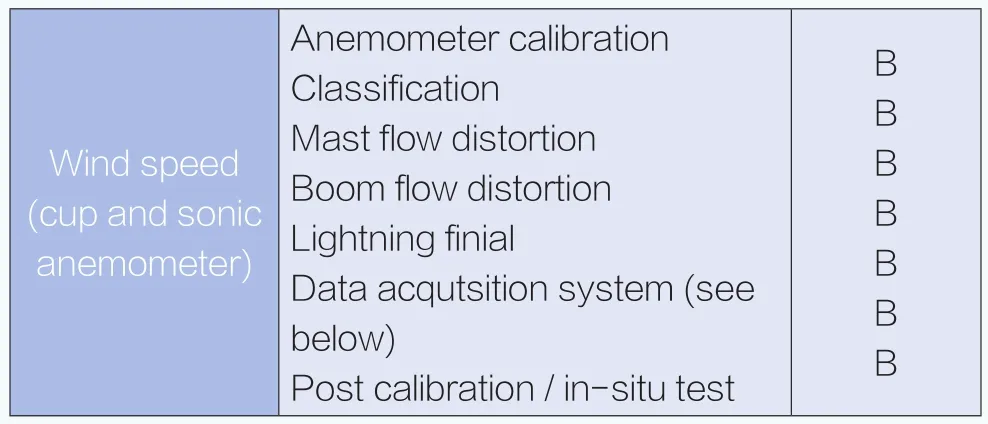
表2 風杯式風速計所需計算的不確定度
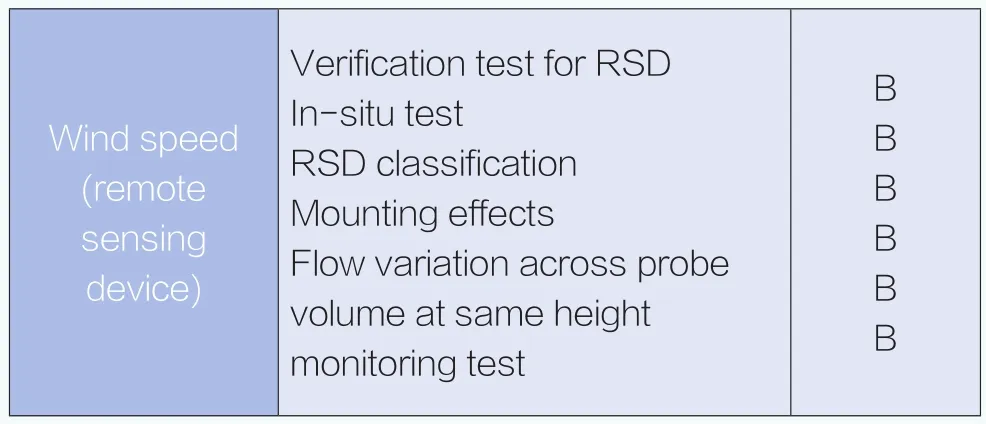
表3 遙感測風設備所需計算的不確定度
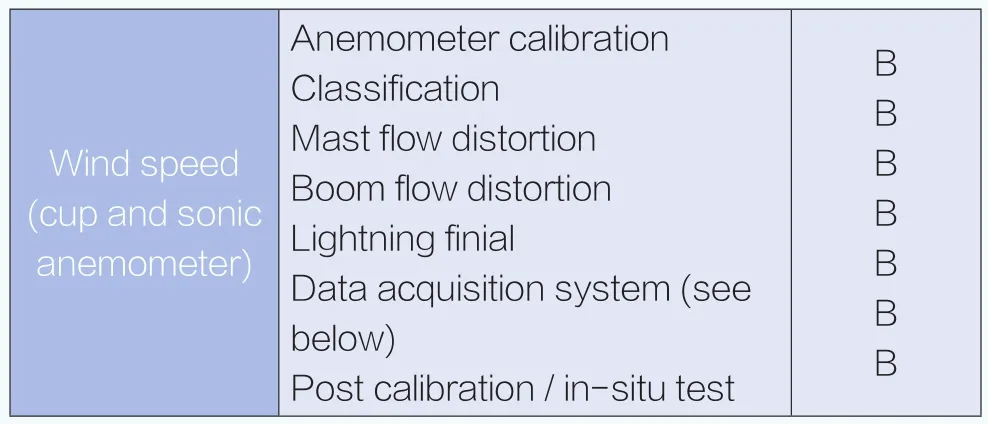
表4 風速測量不確定度分量
風杯式風速計和遙感測風設備的不確定度在大類別上并沒有太大的差異,但是由于設備不同,其計算方法有較大的區別。因此,在計算不確定度時,有必要將風杯式風速計和遙感測風設備的不確定度分別計算。根據標準,風杯式風速計和遙感測風設備的不確定度分量見表2和表3。
二、風杯式風速計不確定度的計算
1.概述
參照標準,風速測量的不確定度分量見表4。
風速測試的合成不確定度按照以下公式進行計算:

式中:
uVS,precal,i—風速計標定所產生的不確定度;
uVS,postcal,i—采集器現場/后標定的不確定度;
uVS,class,i—風速計分級所產生的不確定度;
uVS,mnt,i—風速計安裝所產生的不確定度;
uVS,lgt,i—避雷針所產生的不確定度;
uVS,mnt,i—風速計安裝所產生的不確定度;
udVS,i—采集系統的不確定度。
2.標定不確定度
在風速測試的合成不確定度計算公式中,uVS,precal,i為風速計標定所帶來的不確定度,如圖2所示。
通過風速計的校準證書,可以查看校準實驗室資質、校準日期和風速計信息,如圖3所示。
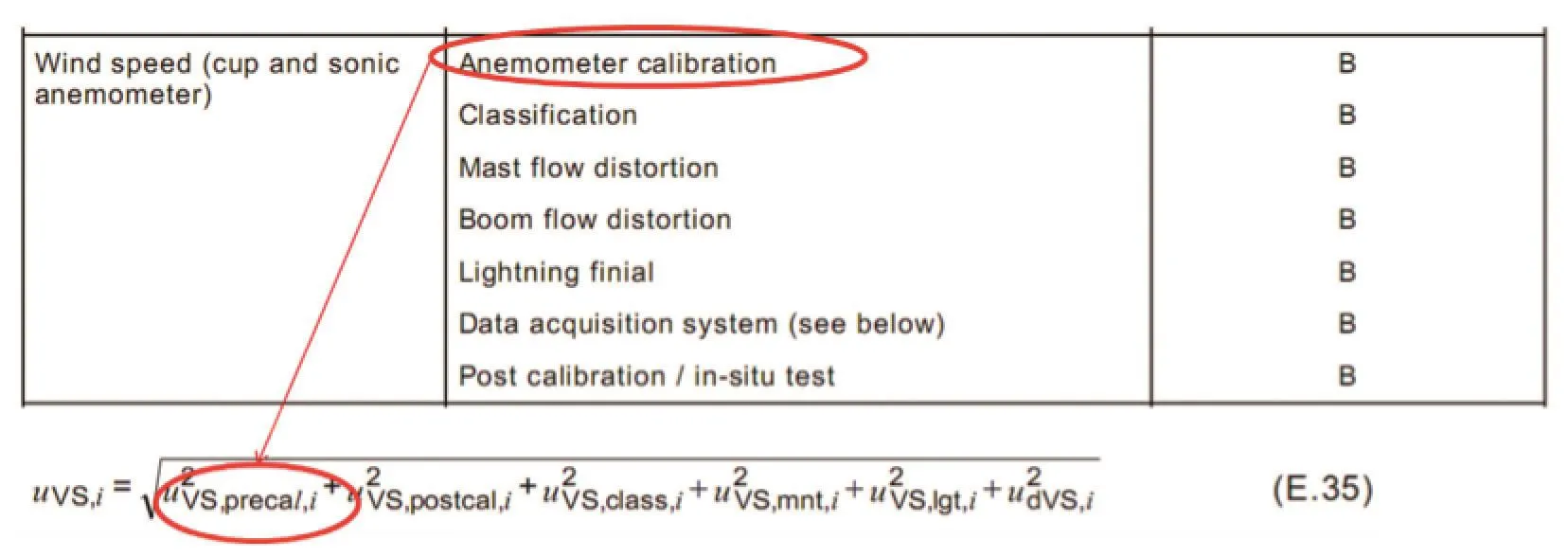
圖2 風速計標定不確定度
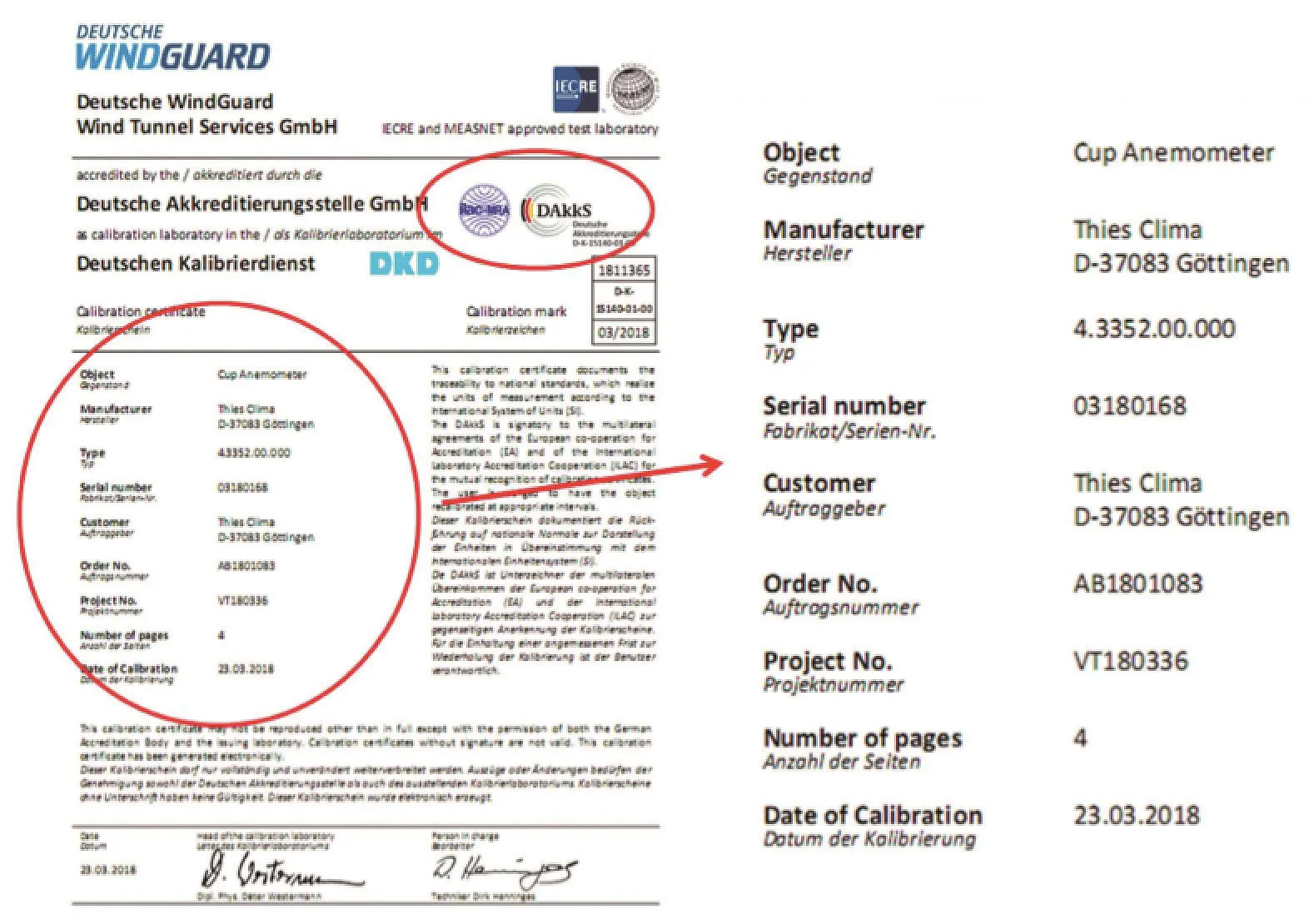
圖3 風速計校準證書1
通過風速計的校準證書,還可以查看執行標準、支撐桿的直徑,如圖4所示。
同時,風速計標定不確定度也可以從標定報告中獲取。在這里,標準不確定度uVS,precal,i可以取成(0.05m/s)/k=0.025m/s,如圖5所示。
3.風速計運行特性(分級)不確定度
在風速測試的合成不確定度計算公式中,uVS,class,i為風速計運行特性(分級)不確定度。
IEC61400-12-1附錄I和附錄J中列出了風速計分級測試的相關要求。溫度、入流角、湍流度、空氣密度等在測試周期內都會發生變化,因此,風速計將在不同的環境條件下運行,并會受到環境變化的影響。而風速計分級的目的是得到風速計在不同環境條件下的運行特性,并在數據處理中考慮運行特性帶來的不確定度,如圖6與圖7所示。

根據不同的使用環境應用對應的分級系數k計算不確定度。
例如,10m/s的風速,使用A1.8的分級結果,對應的運行不確定度為:

4.風速計安裝不確定度
在風速測試的合成不確定度計算公式中,uVS,mnt,i為風速計安裝所產生的不確定度,如圖8所示。
風速計安裝不確定度可參照標準中的默認值進行計算,如表5所示。
5.避雷針不確定度
在風速測試的合成不確定度計算公式中,uVS,lgt,i為避雷針所產生的不確定度,如圖9所示。按照標準要求,避雷針不確定度的默認值為 0.1% ~ 0.2%。
6.采集系統不確定度
在風速測試的合成不確定度計算公式中,udVS,i為采集系統的不確定度,如圖10、圖11所示。
7.后標定/現場標定不確定度
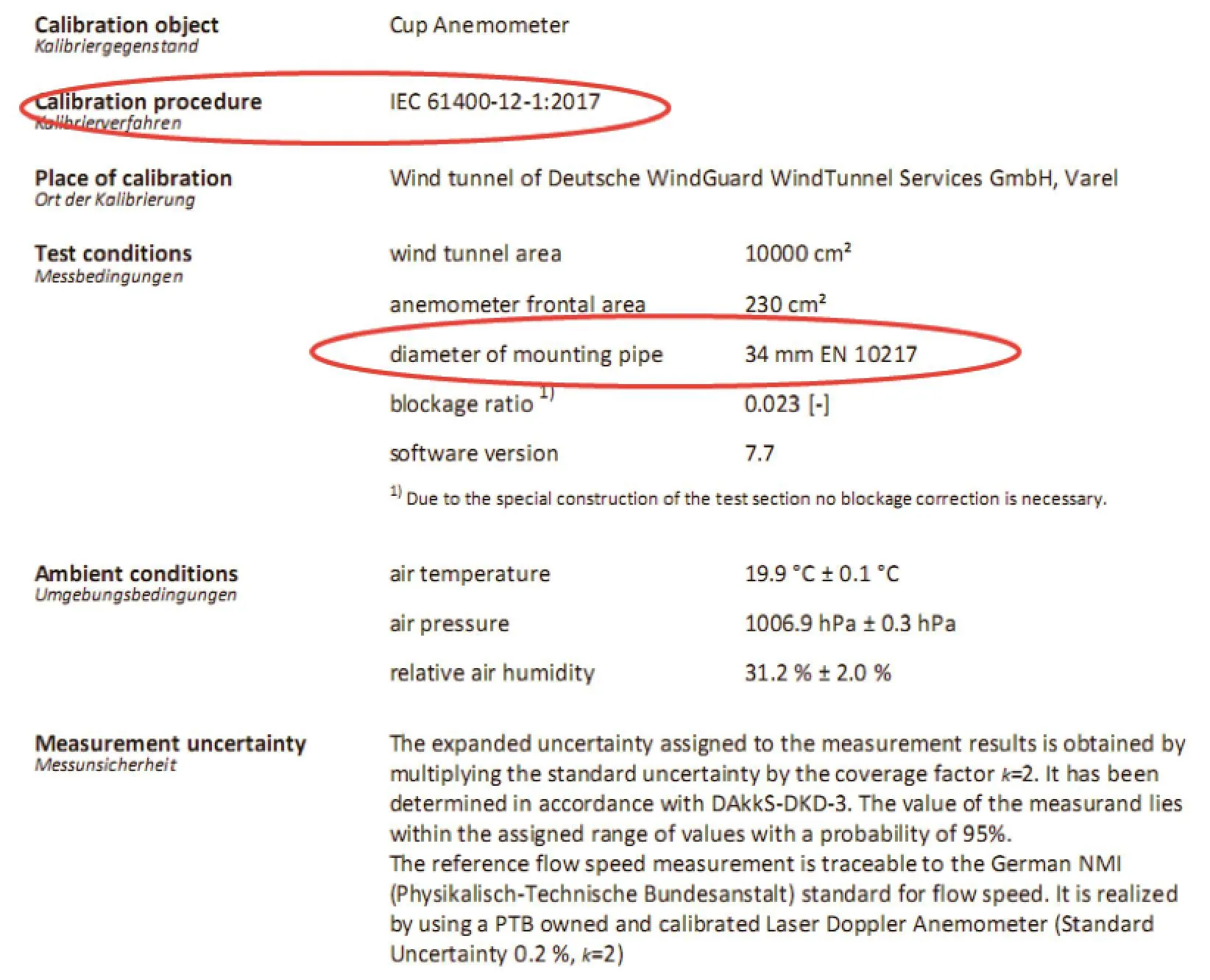
圖4 風速計校準證書2

圖5 風速計校準證書3
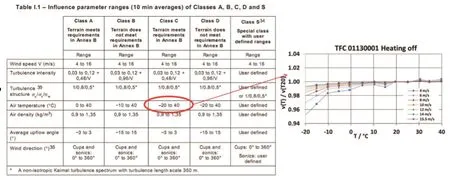
圖6 溫度變化對測試結果的影響
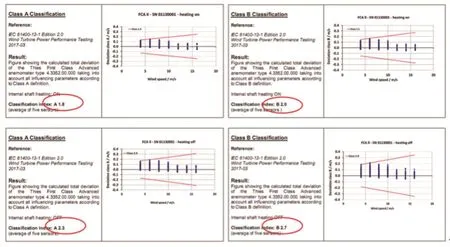
圖7 分級測試結果
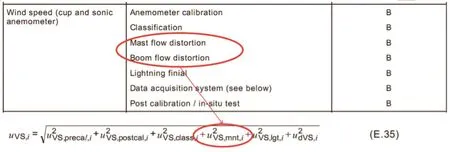
圖8 風速計安裝不確定度
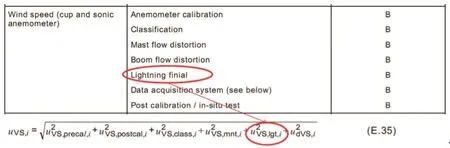
圖9 避雷針不確定度
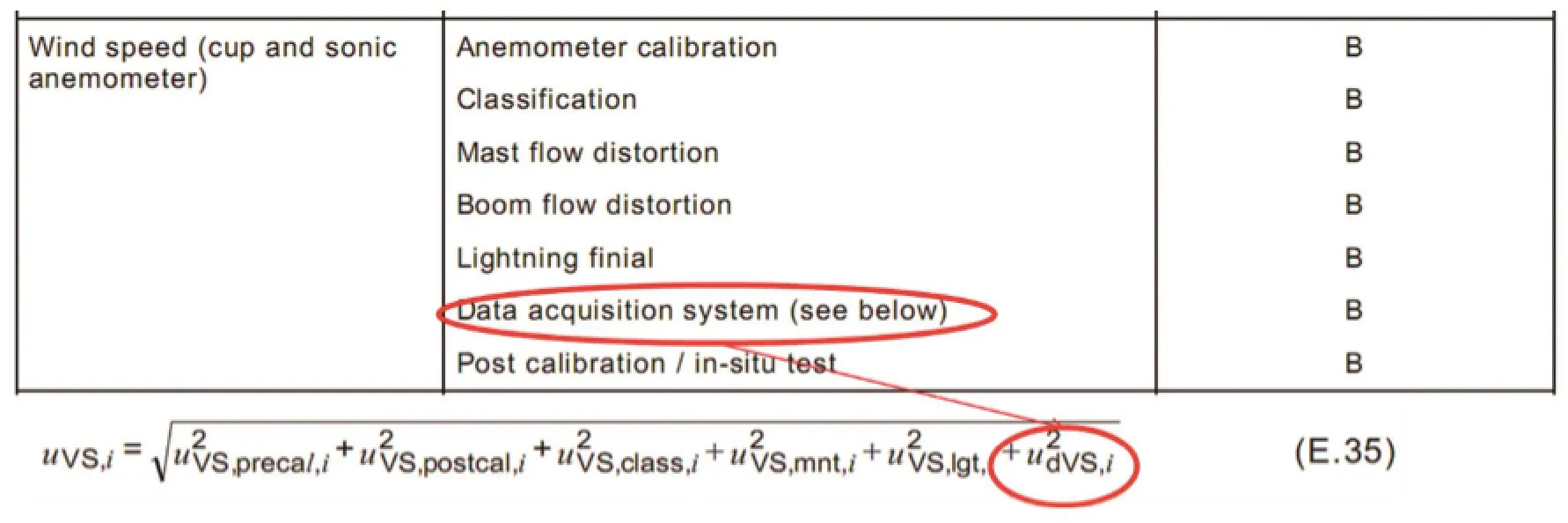
圖10 采集系統不確定度
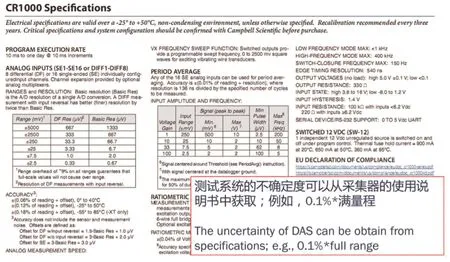
圖11 采集器使用說明書

表5 風速計安裝的不確定度
在風速測試的合成不確定度計算公式中,uVS,postcal,i為采集器后標定/現場的不確定度,如圖12所示。
利用以下公式進行計算:
通過風速比對可以得到現場標定風速比對關系,如圖13所示。
如果進行了后標定:不確定度可以估計為4~12m/s范圍內兩次標定差異的最大值,上限為0.2m/s。
如果進行了現場標定:不確定度可以估計為4~12m/s范圍內最大的δ值,上限為0.2m/s,如圖14所示。
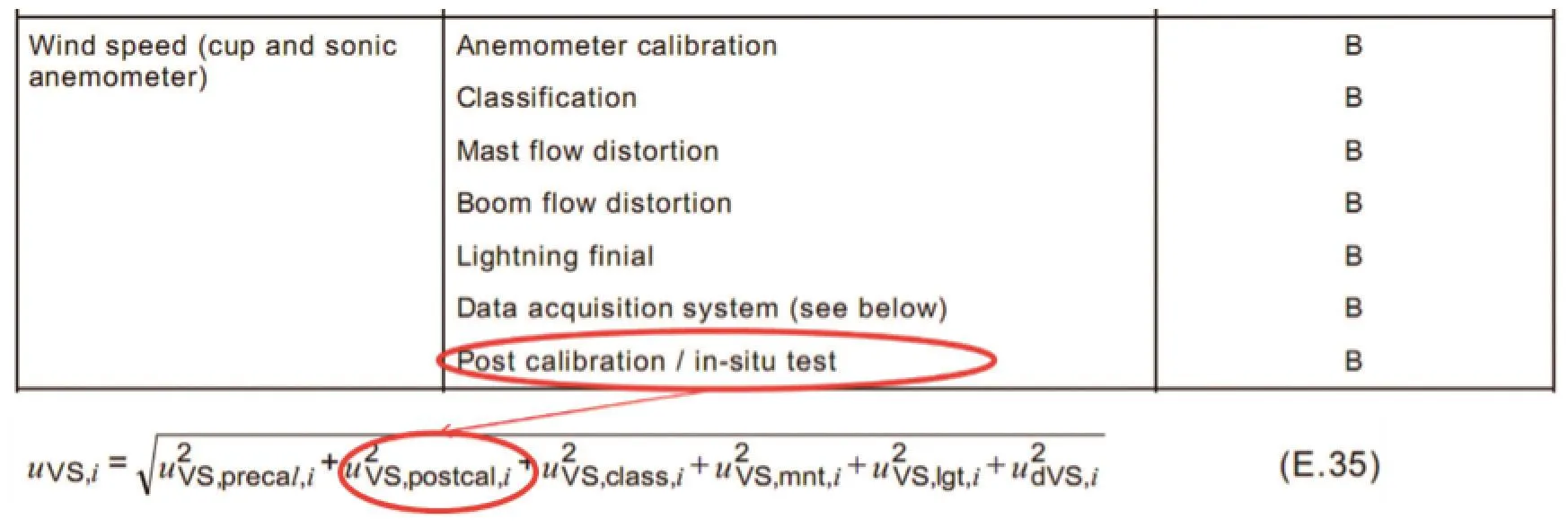
圖12 后標定/現場的不確定度
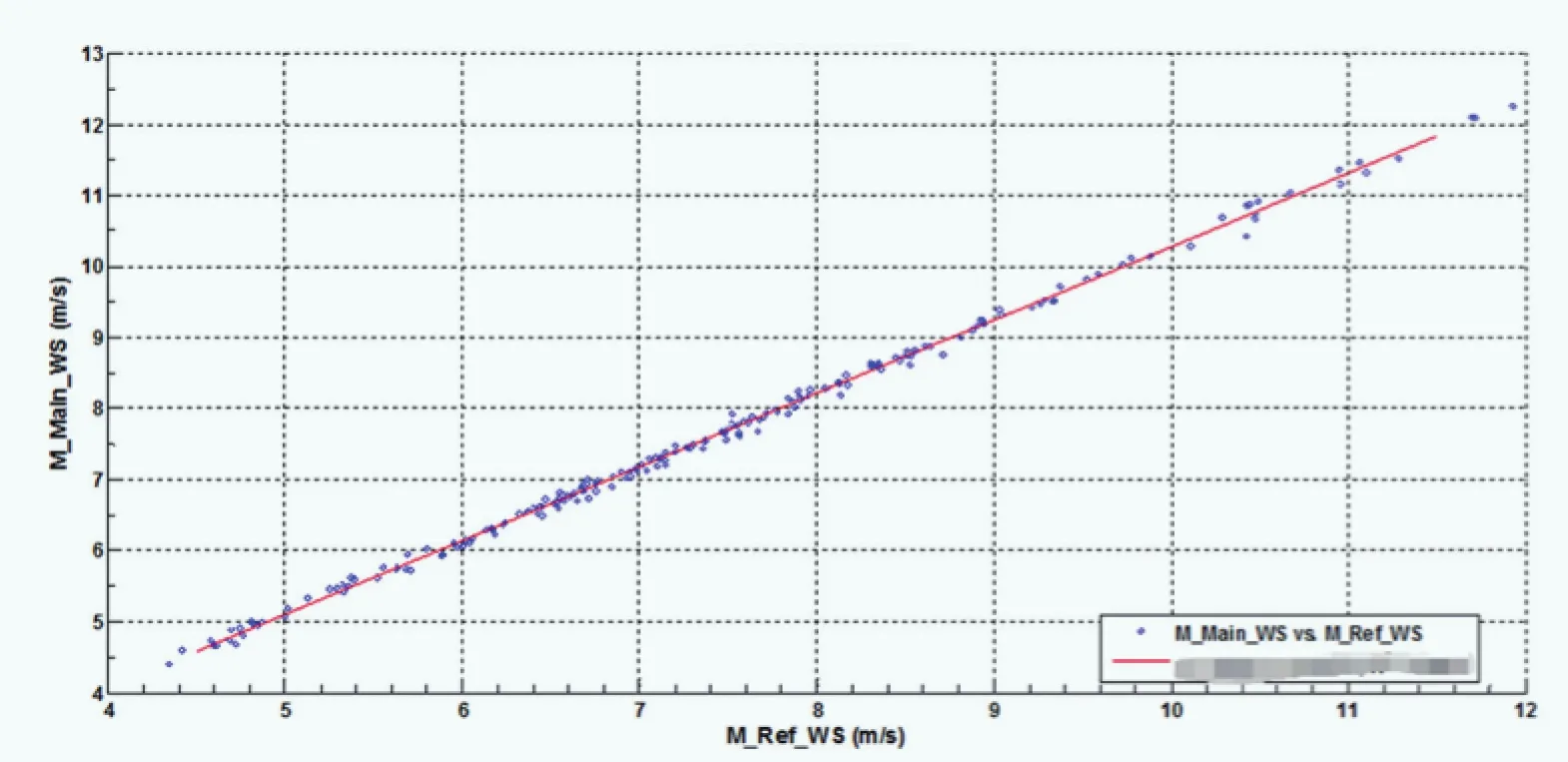
圖13 現場標定風速比對關系
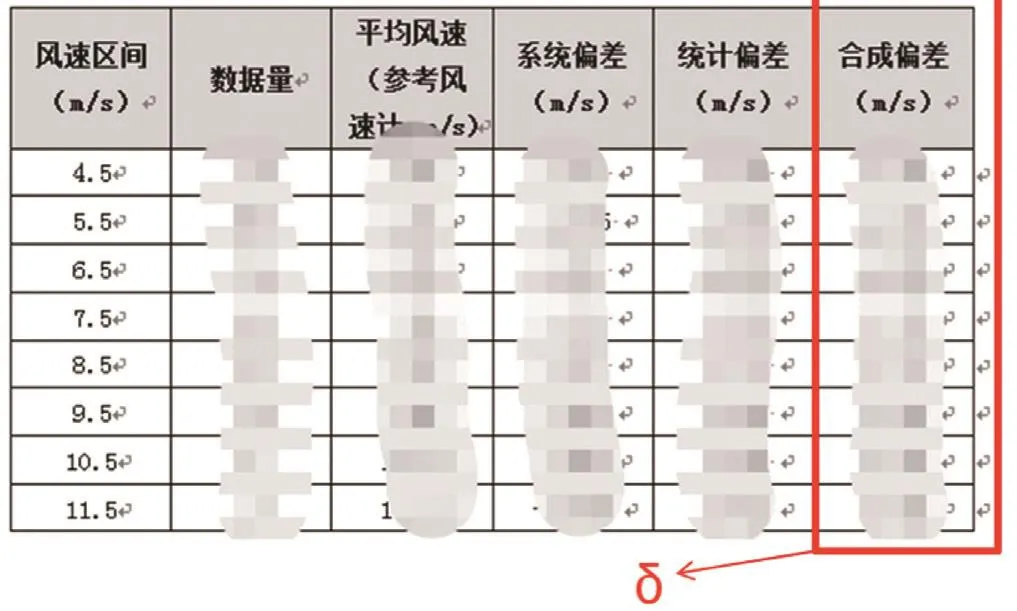
圖14 風速計in-situ不確定度
8.風速測量合成不確定度
按照以上的方法,可以得到風速不確定度的各個分量,由各個分量可以合成總的風速不確定度,如圖15所示。
至此,風速測量不確定度的計算工作已經完成。
三、遙感裝置不確定度
1.概述
在標準附錄L中,有與遙感裝置相關的敘述。附錄L是一個規范性附錄,也就是附錄中的要求都是必須要遵守的。
附錄L描述了對遠程風速測試裝置(RSD)的操作要求,例如光雷達(LIDARS)和聲雷達(SODARS)。
附錄L中規定了一個流程:確保測量的可追溯性符合國際標準并用于功率曲線評估的相關不確定性分量。
附錄L包含以下內容:
(1)L.1 General;
(2)L.2 Classi fi cation of remote sensing devices;
(3)L.3 Verification of the performance of remote sensing device;
(4)L.4 Evaluation of uncertainty of measurements of remote sensing devices;
(5)L.5 Additional checks;
(6)L.6 Other requirements specific to power curve testing;
(7)L.7 Reporting。
2.遙感裝置不確定度的主要分量
遙感裝置不確定度主要包含圖16所示的幾個部分。
通過以下公式可以求出遙感裝置的不確定度:
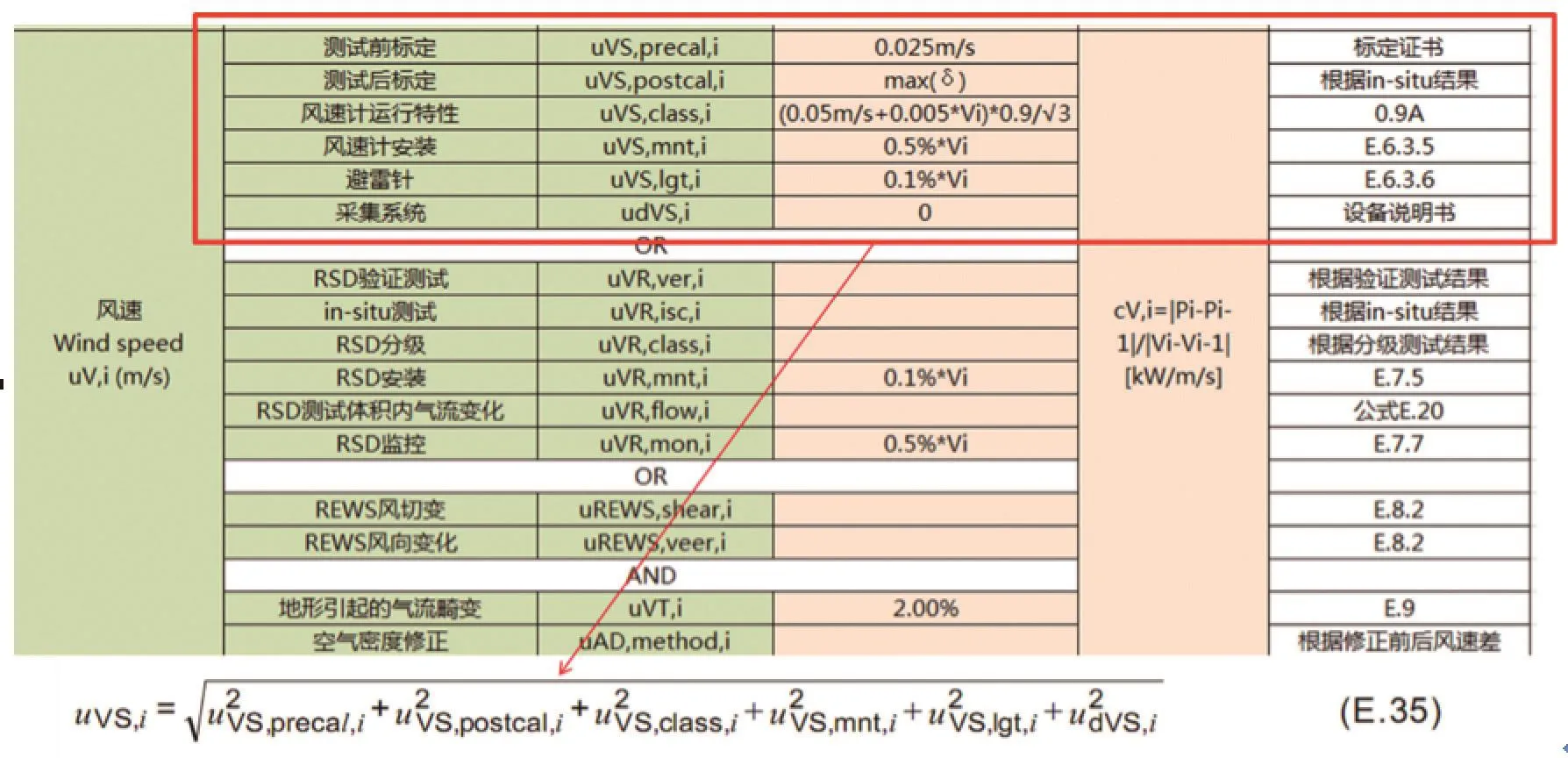
圖15 風速測量不確定度的計算
圖16 遙感裝置不確定度

式中:
uVR,ver,i—RSD驗證的不確定度;
uVR,isc,i—RSD現場標定的不確定度;
uVR,class,i—RSD分級的不確定度;
uVR,mnt,i—RSD安裝的不確定度;
uVR,flow,i—RSD安裝的不確定度;
uVR,mon,i—RSD安裝的不確定度。
3.RSD驗證和分級不確定度
在遙感裝置不確定度計算公式中,uVR,ver,i為RSD驗證的不確定度,uVR,class,i為RSD分級的不確定度,如圖17所示。
若要計算RSD驗證和分級不確定度,必須先了解RSD的驗證和分級測試。參照標準中的要求,遙感裝置(RSD)使用時須遵循圖18所示的流程。
RSD需要經過分級和驗證后才可以在測試中使用。通過分級測試,可以得到環境因素對遙感設備的影響大小,即敏感性。同時,可以得到獨立變量對于遙感設備的精度計算結果。結合相關結果,得到最終的不確定度,如圖19-圖21。
4.RSD安裝不確定度
在遙感裝置不確定度計算公式中,uVR,mnt,i為RSD安裝的不確定度1,如圖22所示。參照標準,該不確定度的默認值為0.1%。
在遙感裝置不確定度計算公式中,uVR,flow,i為RSD安裝的不確定度2,如圖23所示。
參照標準,該不確定度的默認值為2%~3%,可按照以下公式進行計算:

在遙感裝置不確定度計算公式中,uVR,mon,i為RSD安裝的不確定度3,如圖24所示。參照標準,該不確定度默認值為0.5%。
5.RSD現場標定不確定度
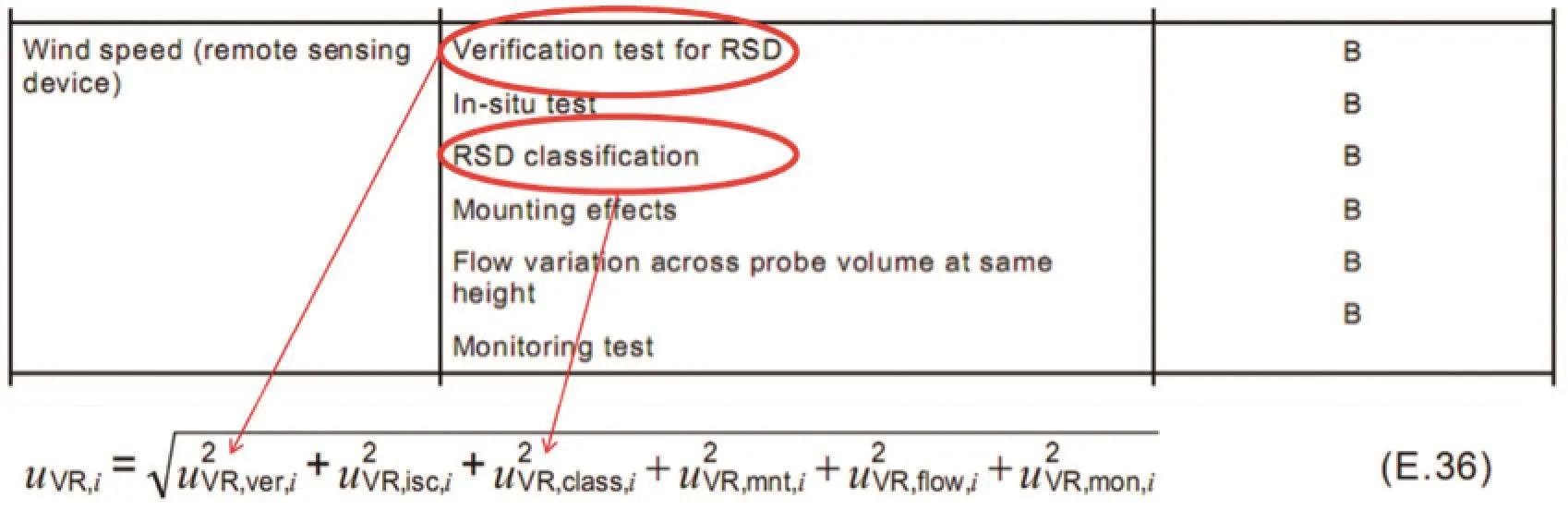
圖17 RSD驗證和分級不確定度
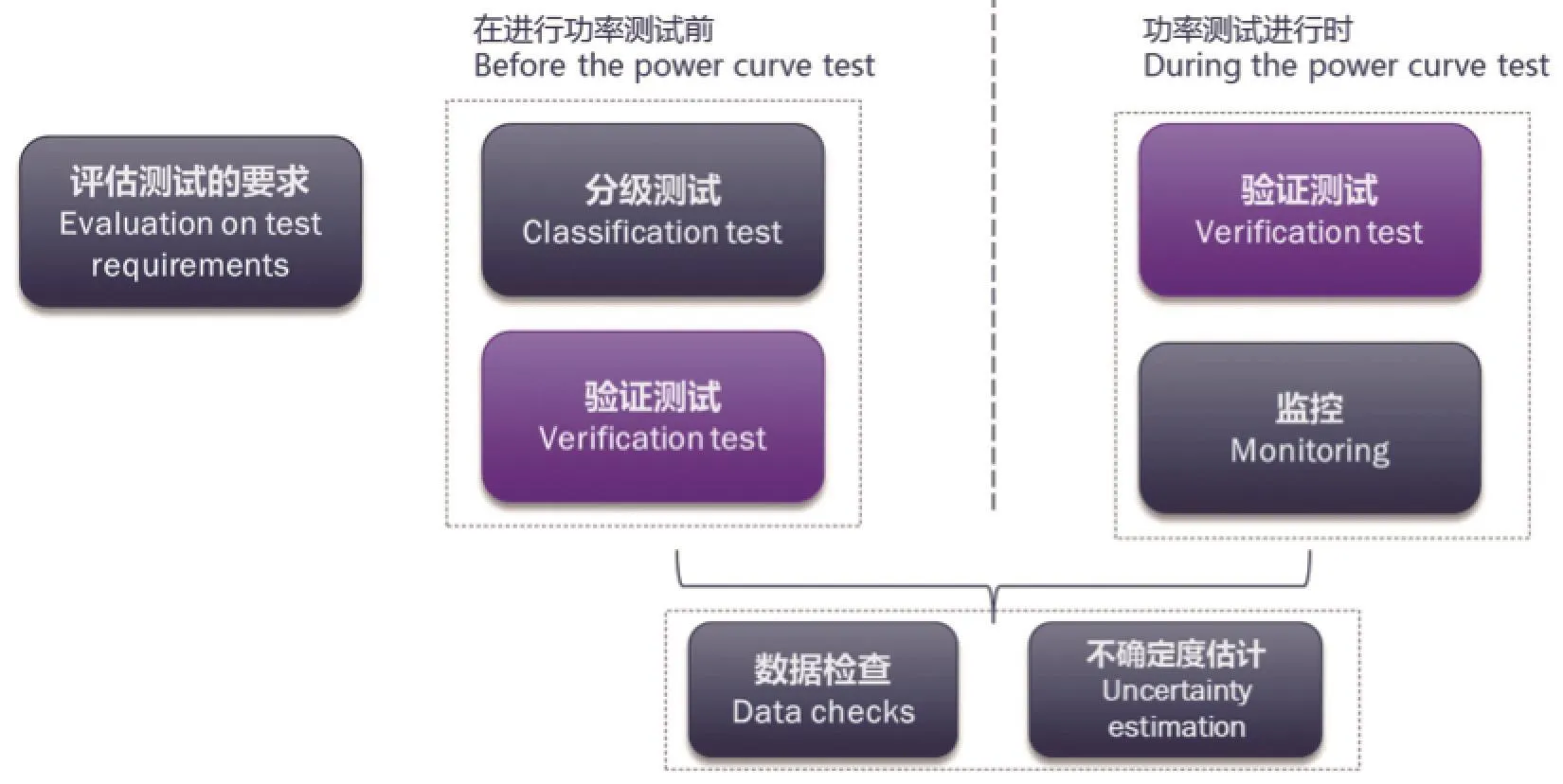
圖18 RSD使用流程
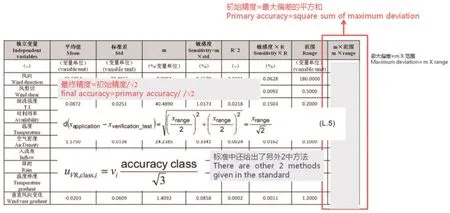
圖19 精度計算方法
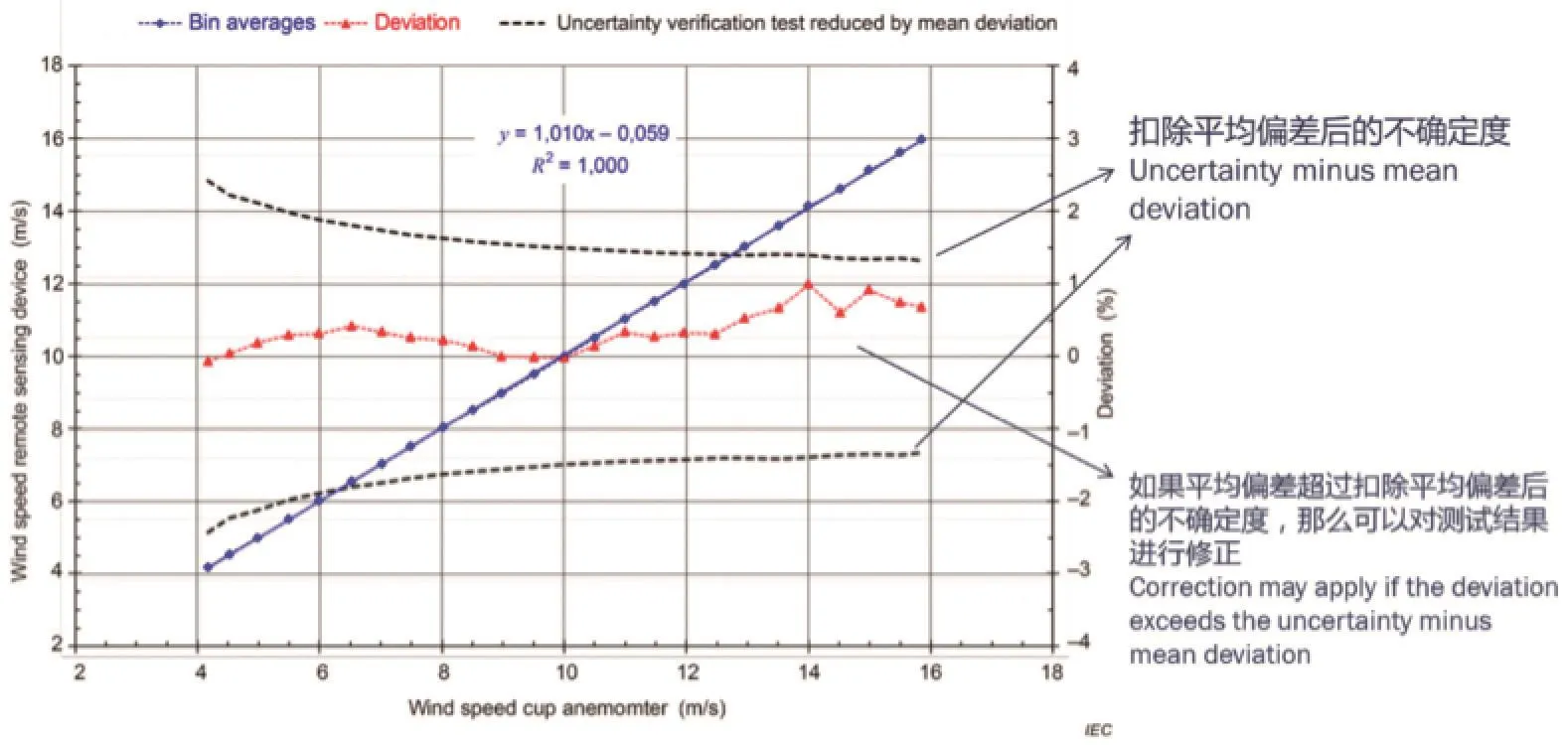
圖20 IEC標準中的案例

圖21 遙感裝置不確定度的計算
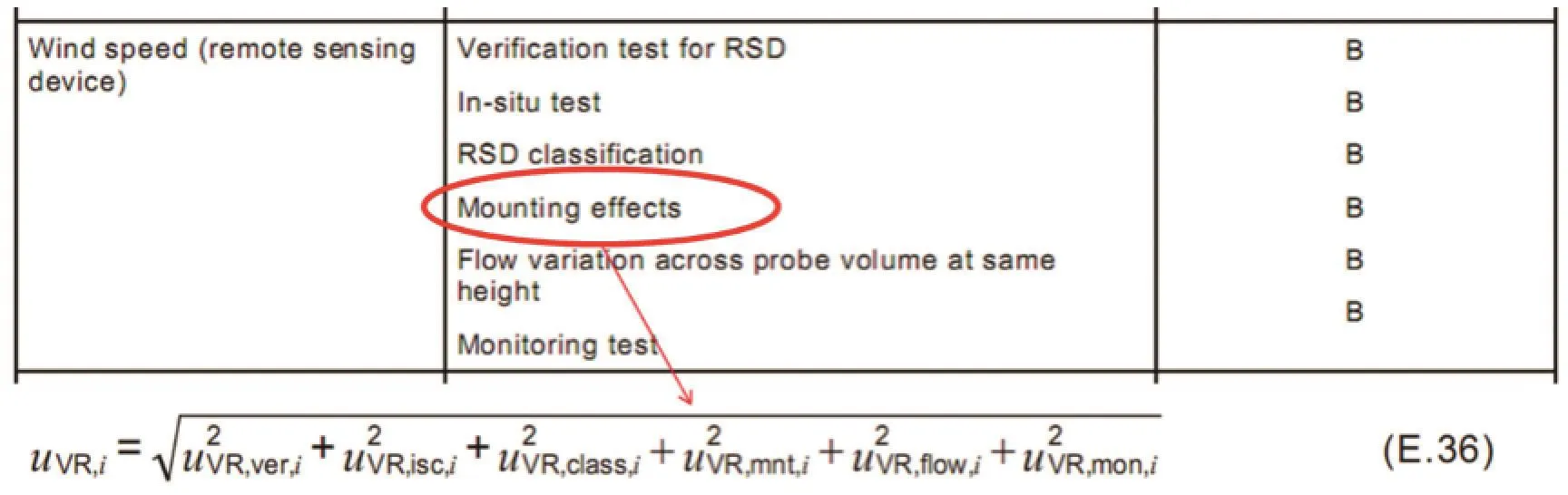
圖22 RSD安裝不確定度1
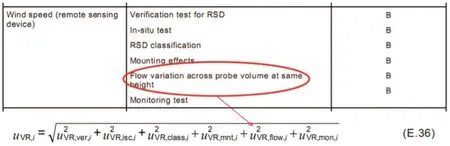
圖23 RSD安裝不確定度2
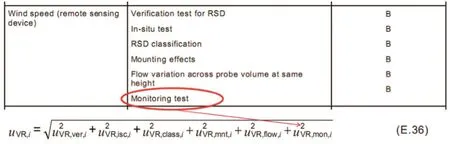
圖24 RSD安裝不確定度
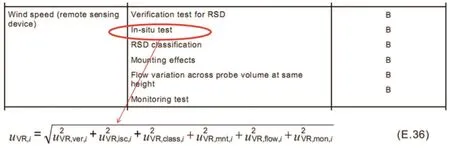
圖25 RSD現場標定不確定度
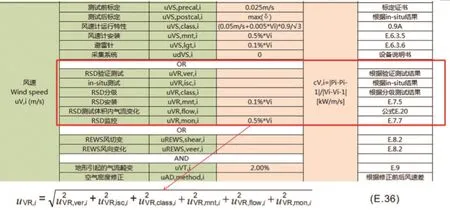
圖26 RSD合成不確定度計算表
關于RSD現場標定,標準附錄K中有詳細描述,相關信息如圖25所示。
6.RSD合成不確定度
RSD合成不確定度計算表如圖26所示。
至此,RSD的不確定度計算完畢。
綜上,實際測試和分析中,需要根據實際情況,先求取不確定度的分量,再合并成最終的合成不確定度。

攝影:王鵬岳
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年8期)2019-05-09 02:22:48
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
西南交通大學學報(2016年4期)2016-06-15 20:29:37
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21