列車網絡控制系統半實物仿真平臺設計及應用*
2018-03-06 02:25:36李美華矯德余孫昊雯
鐵道機車車輛 2018年1期
李美華, 矯德余, 孫昊雯
(中車大連電力牽引研發中心有限公司, 遼寧大連 116052)
網絡控制系統(TCMS)用于監控車載牽引系統、制動系統和列車內各主要設備的狀態,實現車輛的管理、監視和診斷功能。網絡控制系統作為軌道交通裝備的神經和大腦,其運行的可靠性關系著列車的行車安全及人們的生命財產安全。如有不慎,很可能造成無法挽回的損失和災難。因此,網絡控制系統在正式運營之前,必須對其進行充分的測試驗證。然而整車的動靜態調試階段主要是各個子系統設備與設備之間,設備與車體網絡之間的協調配合的調試過程,而非一個幫助各個子系統查找錯誤的過程。因此,急需一套高效可靠的地面測試系統對網絡控制系統進行測試。
1 半實物仿真平臺設計
1.1 設計需求分析
通過分析目前網絡控制系統裝車前功能測試方法的優缺點,可以明確在平臺設計中應揚長避短,設計的測試平臺應具有以下特點:一是測試平臺能真實地模擬列車網絡控制系統的工作狀況;二是測試平臺的測試過程操作方便,方便專業測試人員的介入;三是測試過程無需協調他方,能進行靈活自由的測試。
半實物仿真技術作為將物理仿真和數字仿真相結合的一種仿真技術,它比數字仿真更接近于真實情況,又能解決一些物理仿真無法模擬的問題。半實物仿真作為替代真實環境或設備的一種典型方法,既提高了仿真的逼真性,又解決了以前存在于系統中的許多復雜建模難題。
1.2 系統方案設計
借助于半實物仿真技術的設計思想,構建一個列車網絡半實物仿真平臺用于對網絡控制系統中的車輛控制單元(VCU)功能及網絡通信狀況進行測試。設計中,對于被測單元VCU、司控臺、遠程輸入輸出單元(RIOM)、顯示屏(DDU)等模塊以實物形式接入仿真回路中,而對于牽引系統、輔助系統、制動系統等體積較為龐大的子系統以數學仿真模型運行于仿真機的形式接入仿真回路中,系統方案設計原理圖如圖1所示。
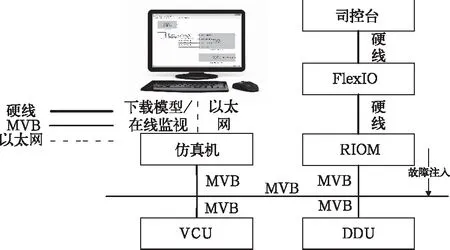
圖1 網絡半實物仿真平臺設計原理圖
1.3 具體實現
根據平臺設計原理圖,仿真機、VCU、RIOM和DDU之間通過MVB總線相連,它們之間是通過MVB總線進行數據通信;上位機(建模工具和監控軟件)通過以太網線與仿真機相連;司控臺和FlexI/O之間,FlexI/O與RIOM之間通過硬線相連。FlexI/O用于將采集到的硬線信號進行調理之后發送給RIOM單元的DI或AI模塊進行采集;同時接收RIOM單元的DO或AO模塊發出的硬線信號。因為在利用半實物仿真平臺進行不同項目的網絡控制系統測試時,各個項目的司控臺的硬線信號在RIOM中的具體通道會有所不同,導致硬線接到RIOM單元的連接方式也會不同,因此在每進行一個項目的仿真時就需要改變一次硬線連接。為了避免這種反復接線的問題,可以通過在FlexI/O模塊中調整采集到的相關硬線信號的順序使其與項目中RIOM單元的數據通道相對應從而達到避免重新連接硬線的目的。
上位機中以MATLAB/Simulink軟件作為前端仿真建模工具,用于進行網絡控制系統各子系統的模型搭建及模型代碼的生成和下載;上位機中還運行實驗監控軟件,實現對實時仿真測試進行項目管理、試驗啟停控制、測試參數輸入、反饋變量監控以及試驗數據記錄等功能。仿真機選用的是能與MATLAB/Simulink實現無縫連接的NI PXI-8109仿真機,用于運行各子系統仿真模型的可執行目標代碼。VCU機箱用于運行網絡控制系統的被測主控程序,RIOM機箱用于采集司控臺發出的硬線控制信號。
平臺中還引入了故障注入模塊,對網絡控制系統施加干擾,用于模擬車輛運行過程中網絡控制系統受到的來自噪聲和振動方面的干擾。該模塊由干擾注入硬件板卡和試驗軟件兩部分組成,其中干擾注入硬件板卡用于產生干擾信號并注入到網絡控制系統中;而試驗軟件則用于控制產生干擾的類型,干擾的啟停時間和產生時長。
2 半實物仿真平臺應用
2.1 仿真測試流程
在使用網絡半實物仿真平臺進行仿真測試時,測試人員一般需進行以下幾個步驟:測試分析與設計,測試用例設計,離線模型搭建、編譯、自動代碼生成,監控界面的設計,模型鏈接下載,在線仿真試驗等。仿真平臺的仿真測試流程如圖2所示。
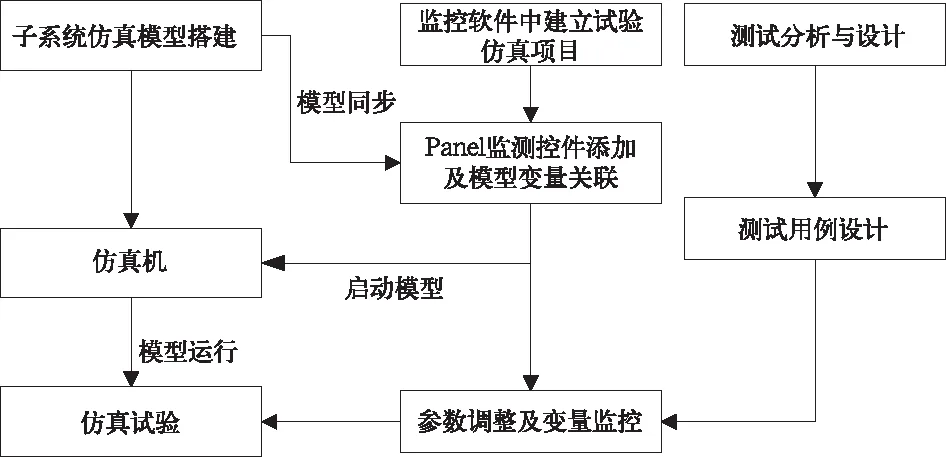
圖2 網絡半實物仿真平臺測試流程圖
2.2 模型搭建
測試開發人員利用網絡半實物仿真平臺進行測試時,需要為網絡控制系統的非實物部分的各個子系統搭建仿真模型。模型的搭建過程如圖3所示。
以基于MVB的網絡控制系統為例進行模型搭建的介紹。在模型搭建過程中分析MVB網絡的通信特點,利用Simulink自定義了MVB初始化模塊、MVB接收模塊及MVB發送模塊,仿真子系統模型主要圍繞這3個模塊進行搭建。首先根據被測VCU的MVB數據流,利用相關軟件生成適用于Simulink的.xml格式的數據流文件,并導入MVB初始化模塊中。然后通過分析VCU與子系統之間的通信機制和功能特點,使子系統經過邏輯處理后的數據由子系統MVB發送模塊發出,經VCU邏輯處理后的相應反饋數據由子系統MVB接收模塊接收,最后將接收到的反饋數據與期望值作比較。在搭建好模型后還需進行相關的配置,包括選擇.tlc文件、設置模型仿真步長、仿真時間、仿真機目標IP地址等,目的是為了能夠生成可在仿真機中運行的目標模型代碼。例如,當模擬牽引系統與VCU進行通信及功能交互時,搭建的牽引系統模型包括3部分,信號接收模塊、邏輯功能模塊和信號發送模塊。其中邏輯功能模塊依據牽引系統的內部邏輯功能進行搭建,主要完成電網電壓、電網電流、不同牽引級位下牽引力和牽引制動力、逆變電流等的模擬。牽引系統模型如圖4所示。
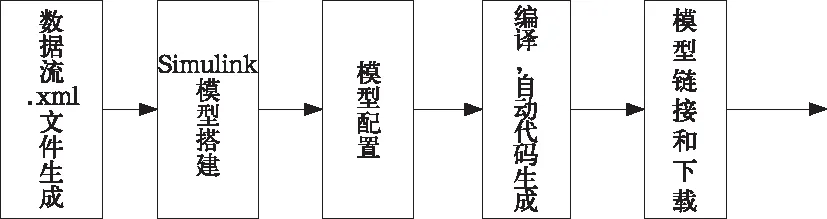
圖3 Simulink模型搭建流程圖

圖4 牽引系統模型
2.3 測試界面設計
模型編譯下載后會生成.Sim文件,通過測試監控軟件打開后,可實現仿真模型與測試監控軟件的同步對應。在監控軟件中可進行加載模型,啟動模型,停止模型等操作。而測試數據的輸入以及反饋變量的監控和測試結果顯示等操作則需要在測試監控軟件的控制頁面Panel中進行。因此進行測試之前首先需要對監控界面進行設計,向頁面中添加與布局控件,將模型變量與控件關聯等操作完成,如圖5所示。
監控界面中,在試驗狀態下可對參數進行調整從而實現測試數據的輸入,而對于測試結果的顯示則通過將反饋變量與期望值的比較結果與指示燈顯示控件關聯實現,如對比結果匹配,則指示燈亮;不匹配,則指示燈滅。
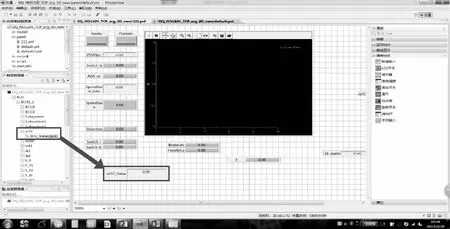
圖5 測試監控頁面
2.4 應用
該網絡半實物仿真平臺已經應用于國內外一些城軌地鐵項目的網絡控制系統的裝車前功能測試,使得在后期的整車靜動態調試過程中網絡控制系統的差錯率明顯降低,提高了靜動態調試效率,大大節省了調試投入的人力和物力成本。該平臺還廣泛應用于系統升級過程中的邏輯功能驗證以及運營維護過程中的故障復現,便于查找程序BUG。
3 技術特點
相較于傳統測試方法,該網絡半實物仿真平臺具有以下技術特點和創新點:
(1) 能夠逼真地模擬列車實際運行狀況,使網絡控制系統的測試結果更加真實準確。
(2) 測試界面友好,利于測試參數的輸入和測試結果的監測。
(3) 利于對網絡控制系統開展客觀,嚴格的獨立測試,保證測試結果的客觀性。
(4) 模塊化仿真模型技術的采用利于各仿真測試項目之間模型的借用和移植,縮短了仿真系統測試模型搭建的周期。
(5) 提高網絡控制系統產品靜態調試和動態調試的效率,利于網絡控制系統的功能升級維護,提高網絡控制系統產品的可靠性。
4 結束語
設計實現了一套網絡半實物仿真測試平臺,用于對列車網絡控制系統的功能測試。該測試平臺在充分吸收傳統測試方法優點的基礎之上,有效地解決傳統測試方法存在的問題,不僅逼真的模擬列車網絡控制系統的運行狀況,而且使整個測試過程操作方便,易于執行,能讓開發方有足夠的時間對網絡控制系統開展靈活充分的測試,提高了網絡控制系統產品的可靠性。網絡半實物仿真測試的測試方法將是未來網絡控制系統功能測試的發展趨勢。
[1] 黃根生,趙紅衛,王欣,等.CRH3動車組半實物仿真測試臺通信的設計與實現[J].鐵道機車車輛,2014,24(2):5-9,69.
[2] 王江,付文麗,等.基于MATLAB/Simulink系統仿真權威指南[M].北京:機械工業出版社,2013.
[3] 黃建強,鞠建波.半實物仿真技術研究現狀及發展趨勢[J].艦船電子工程,2011,31(7):5-7,25.
[4] 薛定宇,陳泉陽.基于MATLAB/Simulink的系統仿真技術與應用[M](第2版).北京:清華大學出版社,2010.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
