基于橫擺力矩控制的電動輪汽車轉彎節能控制
2018-03-10 01:27:43王慶年王軍年
吉林大學學報(工學版) 2018年1期
關鍵詞:分配
孫 文,王慶年,王軍年
(吉林大學 汽車仿真與控制國家重點實驗室,長春 130022)
0 引 言
以電動汽車汽車為代表的新能源汽車,在節能和環保方面符合當前可持續發展的社會需求,因而得到了各國政府的充分重視。采用輪轂電機驅動的電動汽車,因其諸多優點成為當前電動汽車發展的一個重要方向[1]。
人們已經開發出的車身穩定性控制系統,如博世公司(BOSCH)的車身電子穩定性系統(ESP)[2]、豐田公司(Toyota)的車身穩定控制系統(VSC)[3]、本田公司(Honda)的車輛穩定性控制系統(VSA)和寶馬公司(BMW)的動態穩定控制系統(DSC),均通過施加制動力來控制車身穩定性,其效果相當于在車輛的縱向上施加阻力。這種被動的控制雖然起到確保車身穩定性的作用,但也人為地使車輛降速,主動消耗了發動機傳輸的能量。直接橫擺力偶矩控制(DYC)能夠通過主動改變左、右兩側驅動力,產生橫擺力矩,主動改善車身穩定性[4]。當前的DYC控制普遍通過差速器來實現,結構復雜且有一定的能量損失[5]。
目前電動汽車采用電池作為儲能裝置,其續航里程是制約電動汽車發展的一個因素。電動汽車的節能和高效也無法忽視[6]。對于輪轂電機驅動的汽車,其各個驅動輪具有獨立的動力總成,通過實時控制各個電機的輸出轉矩即可達到控制車身穩定性的作用[7],避免了附加制動力矩對總能量的損害。同時由于電動輪汽車取消了車輛原有傳動系統,使其傳動效率大大提高[8]。
目前針對電動輪的轉矩控制,普遍通過優化控制和轉矩分配來改善和提高車輛的操縱穩定性[9]。車輛在產生橫擺力矩時,主動改變其原有的轉彎特性。如果同時改變方向盤轉角,可使車輛在較小的側向力作用下維持原有轉彎特性。而側向力的改變將使車輛的轉彎阻力下降,使汽車在轉彎過程中的能耗降低。
本文重點研究了車輛轉彎時轉彎阻力產生的機理,提出了影響轉彎阻力的因素。提出了通過改變縱向力分配減小轉彎阻力的方法。本文主要通過理論分析和計算機仿真分析的方法,基于車身穩定性的約束,對比了縱向力分配前、后車輛轉彎過程中的能耗,并采用遺傳算法對后軸輪間的轉矩分配系數進行了優化。
1 轉彎阻力產生機理
在不改變車輛模型操縱穩定性的基本特性前提下,為了便于分析和理論推導,本文采用線性2自由度汽車模型進行研究。
1.1 線性二自由度模型動力學
圖1為轉彎工況下的線性2自由度模型的受力分析圖。
車輛的動力學方程如下所示:
Fxr-(Ff+Fw)
(1)
(2)
(3)
式中:m為車輛質量;J為車輛轉動慣量;v為車速;β為質心側偏角;ψ為橫擺角;δ為前輪轉角;lf為前軸距;lr為后軸距;Fxf為前軸切向力;Fxr為后軸切向力;Fyf為前軸側向力;Fyr為后軸側向力;Ff為車輛滾動阻力;Fw為車身風阻。
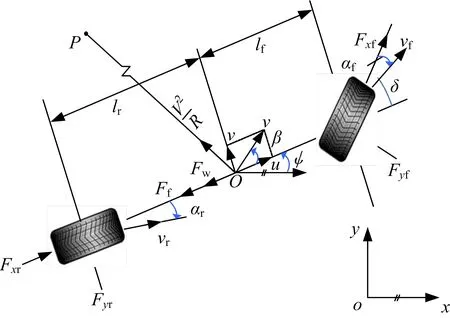
圖1 線性2自由度汽車模型Fig.1 2-DOF single track model
Fyr=(Fxfδ+Fyf)lf/lr
(4)
將式(4)代入式(1) (2),則式(1)(2)可改寫成如下形式:
(5)
(6)
式中:l=lf+lr為車輛的軸距。將式(5)(6)進行代換,忽略前輪轉角δ的平方項,則車輛的總縱向力為:
(7)
根據本文所采用的線性2自由度模型的特點,前后軸的側偏角可以用質心側偏角β=w/u和橫擺角ψ來表示:
(8)
(9)
式中:u為車輛質心處的縱向速度;w為車輛質心處的側向速度。則車輛的質心側偏角可以由其前后軸的側偏角來表示:
(10)
同時,車輛的轉彎半徑也可如下表示,
(11)

(12)
1.2 轉彎降速現象及轉彎阻力產生機理
根據駕駛員的駕駛經驗,即使維持油門踏板開度不變,車輛在由直線進入彎道并完成轉彎行駛的過程中,車速會產生小幅下降。并且越小的轉彎半徑,所帶來的車速降幅越明顯,這就是轉彎降速現象。通過式(12)可以看出,側向力的一個分量是產生這一降速現象的原因。在平路上勻速直線行駛時,切向力之和等于滾動阻力與風阻之和,即:
F=Ff+Fw
(13)
當車輛轉彎行駛時,則產生式(12)中等號右側第3個分量,即為轉彎阻力Fr:
(14)
類似于滾動阻力,定義轉彎阻力系數:
(15)
當車輛在轉彎行駛,假設地面附著良好,則不存在車輪打滑所產生的能耗。由式(14)可以看出,轉彎阻力僅與前輪轉角δ或轉彎半徑,質心側偏角β以及車速v有關。
假設車輛的質心位于前后軸中心,即lf=lr=0.5l,且車輛為中性轉向αf=αr,則式(15)可表示為:
fr=(V2/Rg)αf
(16)
根據汽車理論的推導,車輪的側偏角α與輪胎側向力Fy呈線性關系,即:
(17)
同時,車輛的側向力Fy也與側向加速度ay為線性關系:
(18)
結合式(16)~(18),轉彎阻力系數與側偏角的平方或側向加速度的平方線性相關,即為:
(19)
基于上述理論分析,車輛轉彎過程中的滾動阻力系數和轉彎阻力系數可以繪制成曲線,如圖2所示。
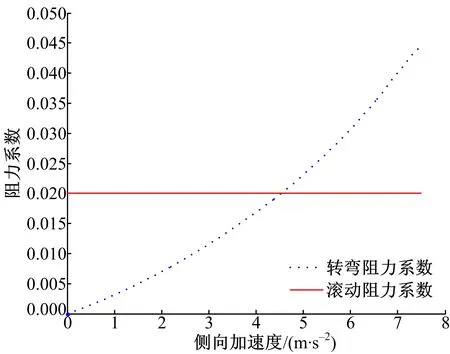
圖2 滾動阻力系數和轉彎阻力系數與側向加速度關系曲線Fig.2 Turning resistance and rolling resistancecoefficient vs. lateral acceleration
圖2中的曲線仿真工況為:車輛繞半徑為50 m的定圓加速行駛,其加速度為2.8 m/s2,初始車速為0,保持輪胎的側偏角在線性范圍內(不大于4°)。從圖2可以看出,轉彎阻力系數隨側向加速度的增大呈現出拋物線增長趨勢,而滾動阻力系數并不隨側向加速度增大而變化。在車輛具有較小的側向加速度時,轉彎阻力系數遠小于滾動阻力系數。而且隨著側向加速的增大,轉彎阻力系數明顯增大并且其數值也大于滾動阻力系數。
2 縱向力分配對轉彎阻力的抑制作用
基于前文的分析可知,轉彎阻力系數fr與方向盤轉角δ為正相關函數,因此可以采用適當減小車輛在轉彎過程中的方向盤轉角的方式減小車輛的轉彎阻力。但是駕駛員在實際駕駛過程中,需要根據路況和預定軌跡完成駕駛動作,即當方向盤轉角減小時,還能夠使車輛維持恒定的橫擺角速度,從而完成相同的轉彎軌跡。
如式(3)所示,車輛的橫擺角速度是由車輛的縱向力和側向力共同影響的。對車輛內外側后輪施加一個差動力ΔFxr,從而產生一個附加橫擺力矩Mz,則式(3)可以改寫成如下形式:
(20)
式中:ΔM=ΔFxrd/2,其中d為車輛的輪距,本文認為車輛的前、后軸輪距相等。
本文在對后軸施加差動力ΔFxr時,并不改變車輛的總驅動力,即內外側車輪的驅動力如下所示:
Fx_out+Fx_in=Fxr
(21)
Fx_out-Fx_in=ΔFxr
(22)
式中:Fx_in和Fx_out分別為內、外側車輪的驅動力。
結合式(1) (2) (12),式(7)所示的各個車輪的合縱向力可以表示為:
(23)
則式(14)所示的轉彎阻力也可以改寫成如下形式:

(24)
對比分析式(24)和式(14)可知,對車輛施加橫擺力矩可以減小轉彎阻力。公式中的質心側偏角β與前輪轉角δ相比非常小。盡管對車輛施加橫擺力矩可能在一定程度上增大后軸側偏角αr,但也同時減小了前軸側向力,從而減小了前軸側偏角αf。綜上,由式(24)可以看出,當車輛轉彎時,可以通過合理改變車輛內、外側車輪的驅動力,減小車輛的轉彎阻力。同時式(24)也說明,車輛的橫擺角速度與縱向力的差值有關,而與各輪輸出的轉矩大小無關。本文所探討的縱向力分配問題,均為車輛穩定情況下進行的。
3 基于能耗的車輛轉矩分配系數優化
基于前文分析的影響轉彎阻力的因素,當車輛轉彎行駛時,方向盤轉角與車輛的轉彎阻力成正比。在整車能耗方面將表征為,車輛以相同車速入彎并行駛等長軌跡,如果保持油門踏板開度不變,那么隨著轉彎半徑的減小,車速降幅增大; 當車輛維持入彎車速不變并行駛等長軌跡,那么隨著轉彎半徑的減小,消耗功率將增大。
針對電動輪驅動車輛,由于其采用電機MAP,需要對后軸的轉矩分配系數進行優化,使得車輛在減小轉彎阻力的同時,電機的耗能最低。針對模型和目標函數的特點,本文采用遺傳算法對轉矩分配系數進行優化。
本文的優化對象為轉矩分配系數k,其表示形式如下所示:
(25)
式中:Tin和Tout分別為內、外側電機的驅動轉矩(本文不考慮電機減速裝置)。
轉矩分配系數的優化目標是在滿足汽車轉彎半徑不變的基礎上,盡量減小轉彎阻力和電機能耗。為了便于分析,定義電機能耗為車輛轉彎時的等效百公里能耗。優化目標如下所示:
(26)
式中:k為轉矩分配系數;J(k)為車輛的等效百公里能耗;Tm_min和Tm_max為單個電機的轉矩極限值;Tt為后軸的總驅動轉矩;t為車輛轉彎耗時;Pm1(k)和Pm2(k)為后軸兩側車輪電機的瞬時功率,其計算表達式如下:
(27)
式中:ni為電機轉速;ηi為第i個車輪的效率,其數值大小通過圖3的電機MAP圖查表得出。
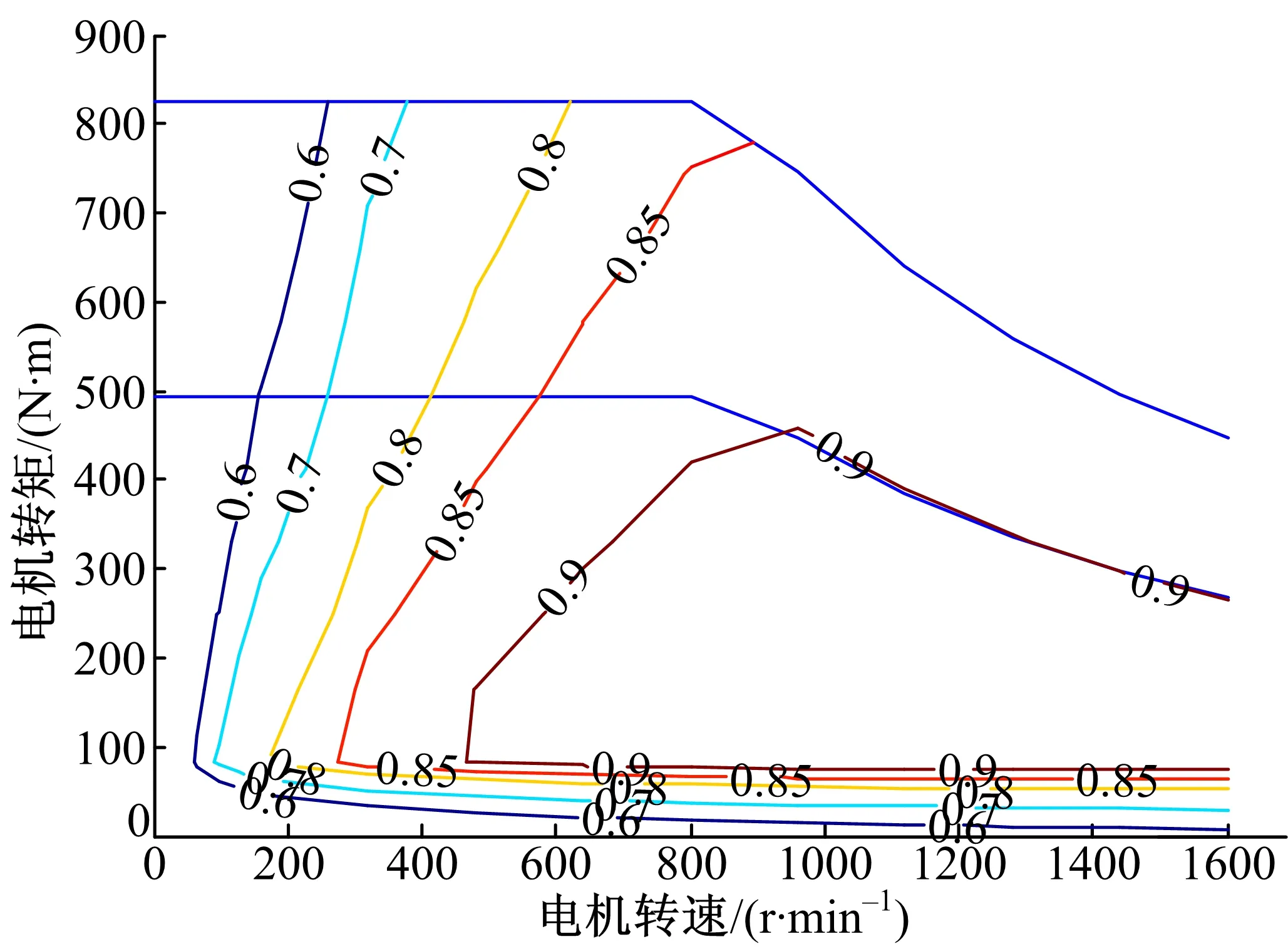
圖3 電機MAP圖Fig.3 Motor efficiency map
式(26)的最后兩個約束條件為穩定性要求。根據采用的仿真軟件的模型,質心側偏角通常為正,且根據文獻選取其小于12°[10,11]。本文在仿真過程中,由于要求車輛的車速和轉彎半徑不變,則橫擺角速度認為基本不變,其變化范圍僅在一個較小的范圍ε內。
通過離線優化得出的最佳轉矩分配系數k將被做成一個表格,在實際應用中采用查表的方式進行。進而車輛的轉矩分配控制器通過查表計算出最佳轉矩分配比κ:
κ=Tin/Tout=(1-k)/(1+k)
(28)
最終,內、外側車輪的實際需求轉矩可以通過下式求得:
(29)
4 仿真結果與分析
在車輛的實際行駛過程中,轉彎工況出現的概率是非常高的。盡管單個轉彎工況持續的時間非常短,能節省的能量也并不大,但是通過累積全工況下的轉彎工況,其節能潛力也是不可忽視的。本節仿真首先采用J-turn實驗來驗證車輛的轉彎降速現象和轉彎能耗高的現象。并通過定半徑圓周實驗來說明轉矩分配系數對車輛轉彎能耗的影響。最終結合實際的電機MAP,說明電機本身的效率變化對整體能耗帶來的影響。
4.1 J-turn實驗
本文定義了如圖4所示的J-turn軌跡,設定仿真車速為50 km/h。質心側偏角、車速曲線、前輪轉角、電機轉矩變化情況等,如圖5~圖8所示。
從圖5可知,車輛在該仿真工況下,質心側偏角變化很小,始終處于穩態情況。如圖6所示,當保持油門踏板開度不變時,不對轉矩進行控制,則車輛在轉彎過程中,車速將由于轉彎阻力而下降。通過對車輛內外側轉矩進行差動控制,在同樣的油門踏板開度情況下,其車速僅在入彎和出彎處有小幅波動,其過彎的速度明顯高于未控制的情況。結合圖6和圖7可以看出,當采用車速閉環控制的駕駛員模型后,車速僅在入彎和出彎的時候有小幅的波動。為了實現車速跟隨,電機需要在車輛轉彎過程中輸出更多的轉矩,用于克服轉彎阻力,如圖8所示。綜上,隨著前輪轉角的增大,車輛所受到的轉彎阻力也隨之增大。
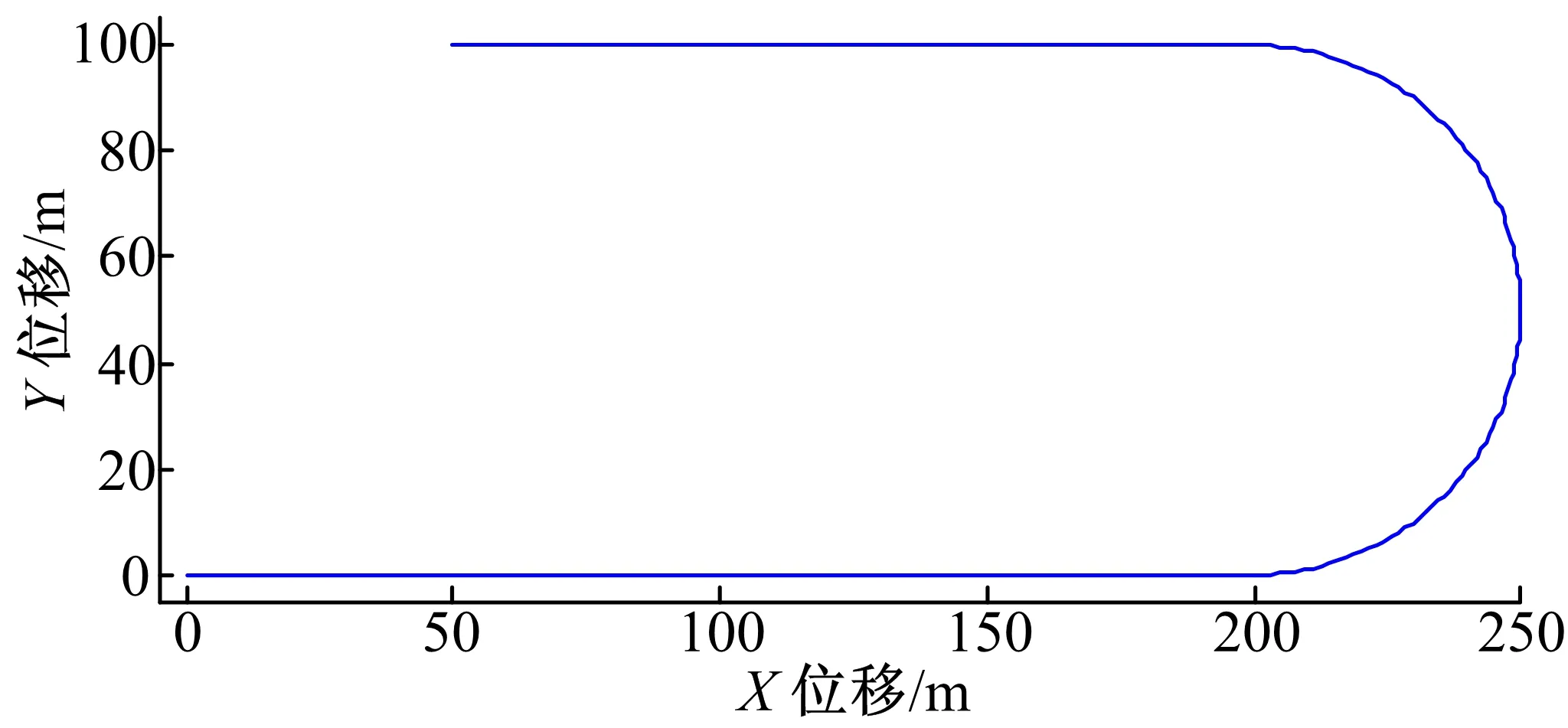
圖4 J-turn實驗仿真軌跡Fig.4 J-turn simulation trajectory
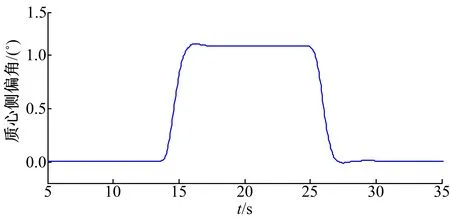
圖5 質心側偏角Fig.5 Sideslip angel
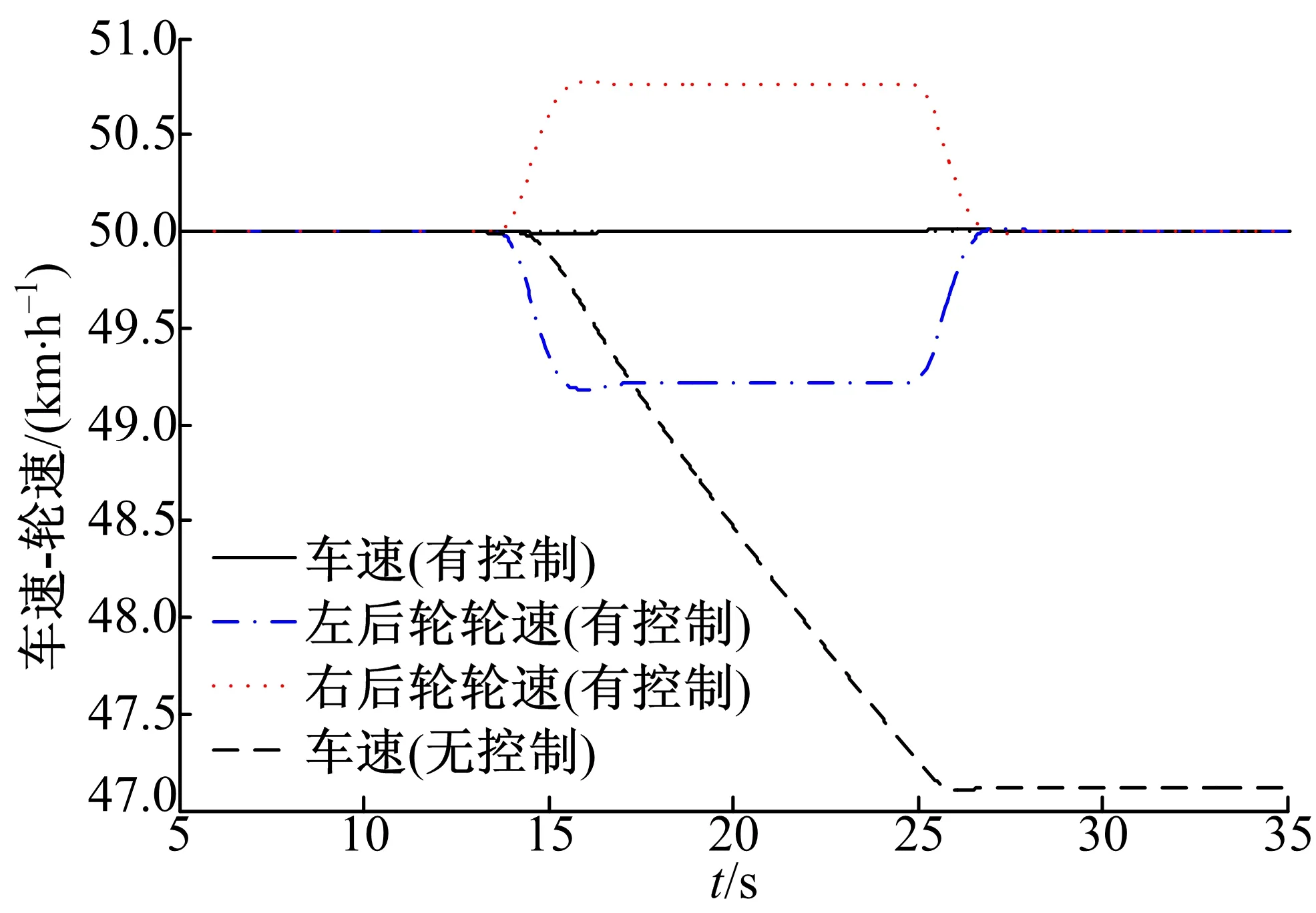
圖6 車速和輪速曲線Fig.6 Vehicle speed and wheel speed of the driving wheels
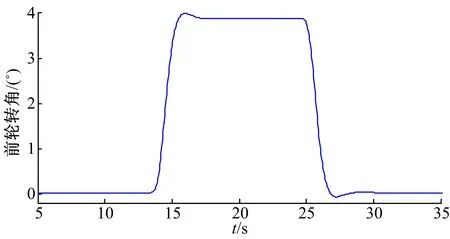
圖7 前輪轉角變化曲線Fig.7 Steering wheel angle
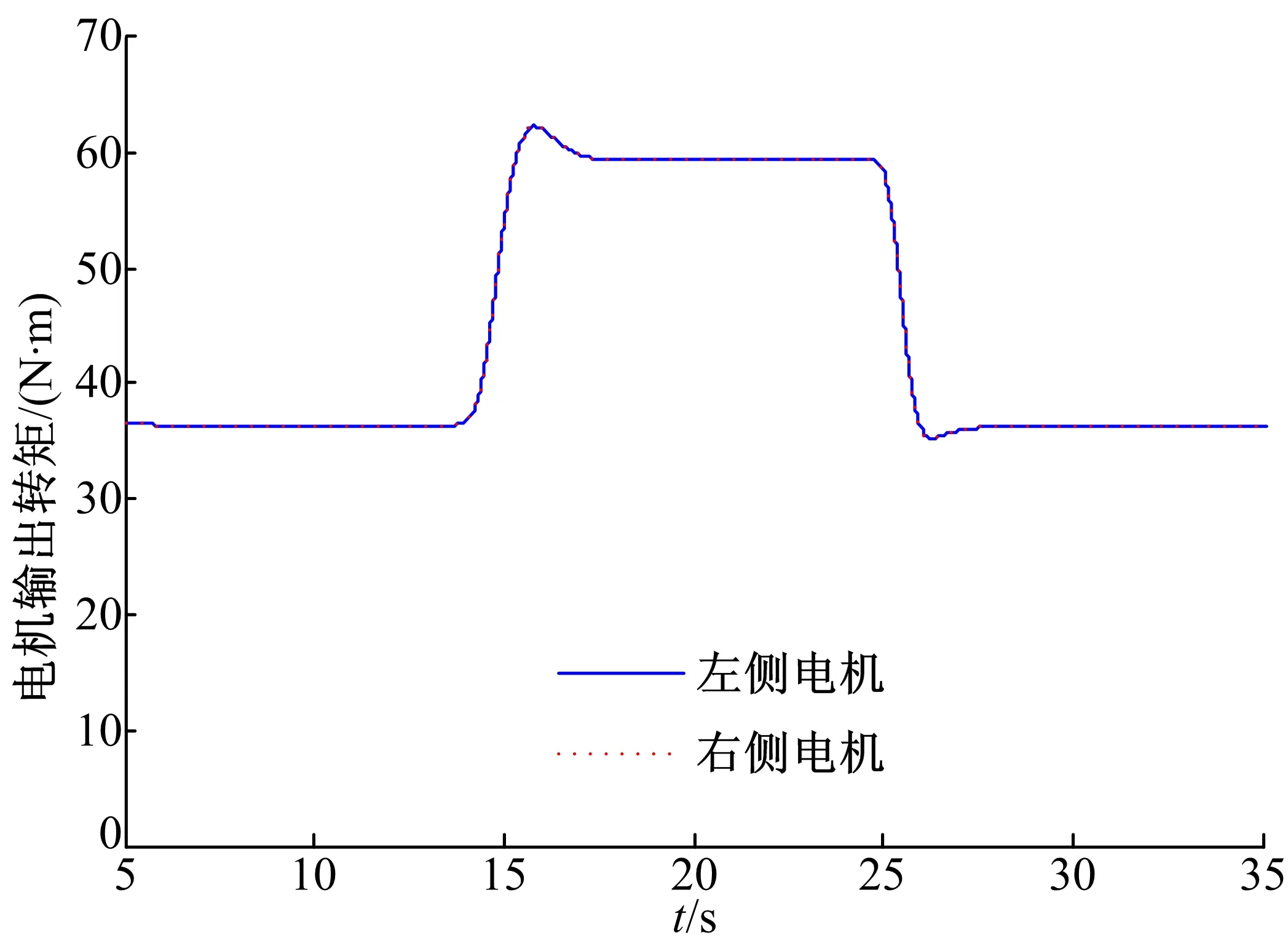
圖8 電機驅動轉矩Fig.8 Motor traction torque with close-loopvehicle speed control
4.2 定半徑圓周實驗
在當前仿真工況下,不考慮電機效率對能耗的影響。本文對比進行了一系列半徑為30~50 m的圓周實驗。設定目標車速為50 km/h。
圖9為車速50 km/h、半徑30 m時調整轉矩分配比例后的各性能變化情況。如圖10所示,在仿真過程中,車速始終保持為50 km/h,進行轉矩輪間分配對車速并無影響。如圖11所示,在轉矩轉移的過程中,車輛的橫擺角速度也沒有明顯變化。從圖12可知,前輪轉角隨著轉矩分配系數的增大而減小,同時車輛仍能保持原軌跡行駛。從圖13可知,車輛的質心側偏角有小幅下降。結合圖12和圖13可以看出,車輛的橫擺角速度與質心側偏角之間并無明顯波動,因此車輛在進行轉矩轉移的過程中,并未出現失穩。如圖14所示,隨著轉矩分配系數的增大,車輛的縱向加速度減小,而車輛的側向加速度保持不變。從圖15可以看出,隨著轉矩分配系數的增大,車輛所受到的轉彎阻力下降,使得電機的需求功率下降。本節的仿真為車輛左轉彎工況,根據車輛動力學原理,由于輪荷轉移,在轉彎過程中,內側(左側)車輪的滑移率將比外側(右側)車輪的滑移率小幅提高。圖16為轉矩轉移過程中的內外側車輪滑移率變化情況。從圖16可以看出,隨著轉矩由內側車輪向外側車輪轉移,車輛的平均滑移率明顯下降。由此可知,轉矩的軸距分配也能有效降低車輛的平均滑移率,從而節約一定能耗。
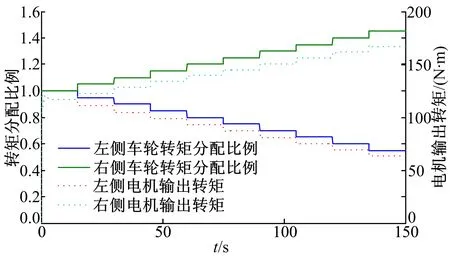
圖9 內、外側車輪轉矩分配比及輸出轉矩Fig.9 Toque deviation ratio command and actualtraction torque of the driving wheels

圖10 車速曲線Fig.10 Curve of vehicle speed
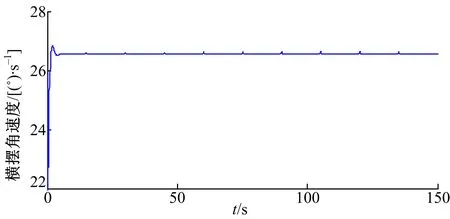
圖11 橫擺角速度曲線Fig.11 Curve of yaw rate
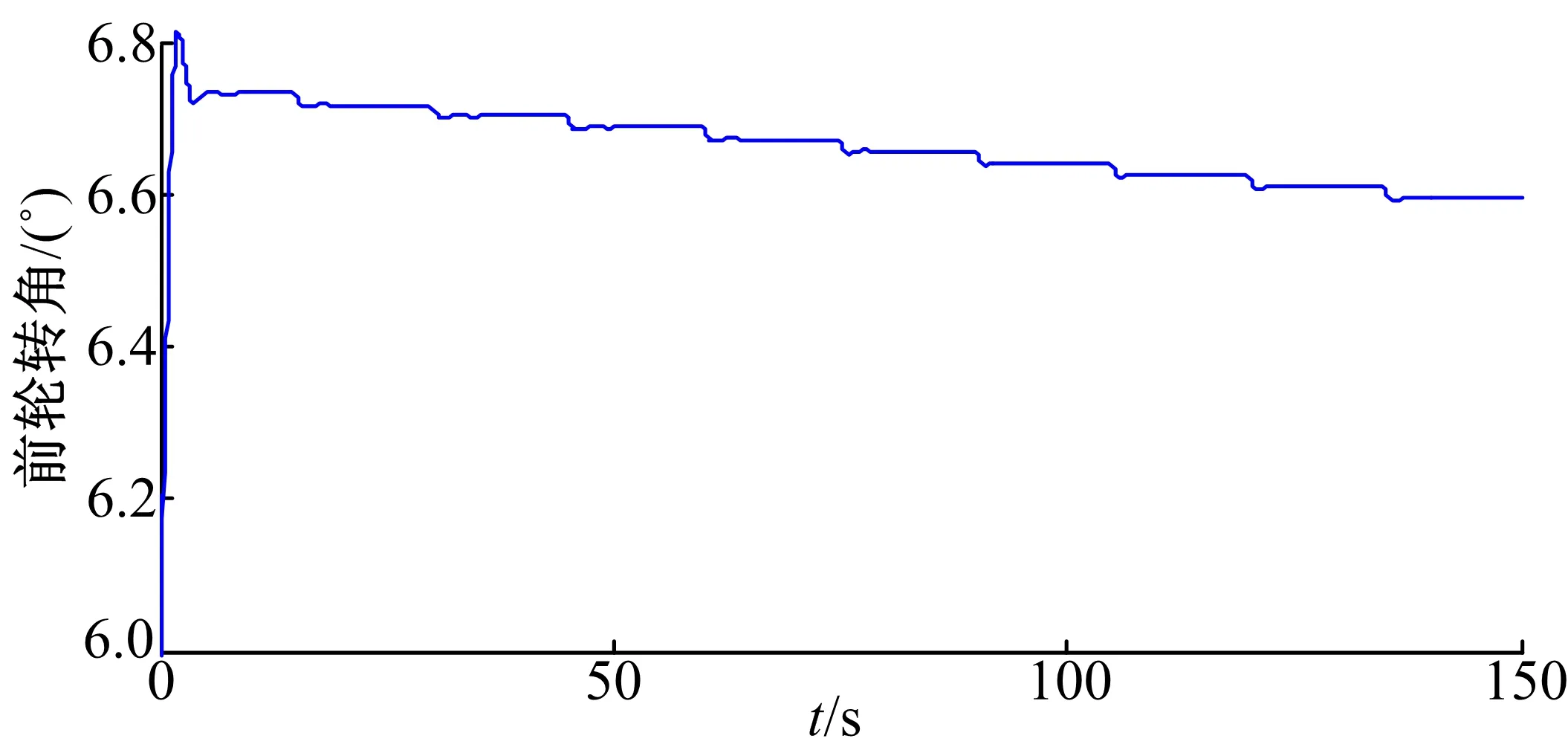
圖12 前輪轉角曲線Fig.12 Curve of steering road wheel angle
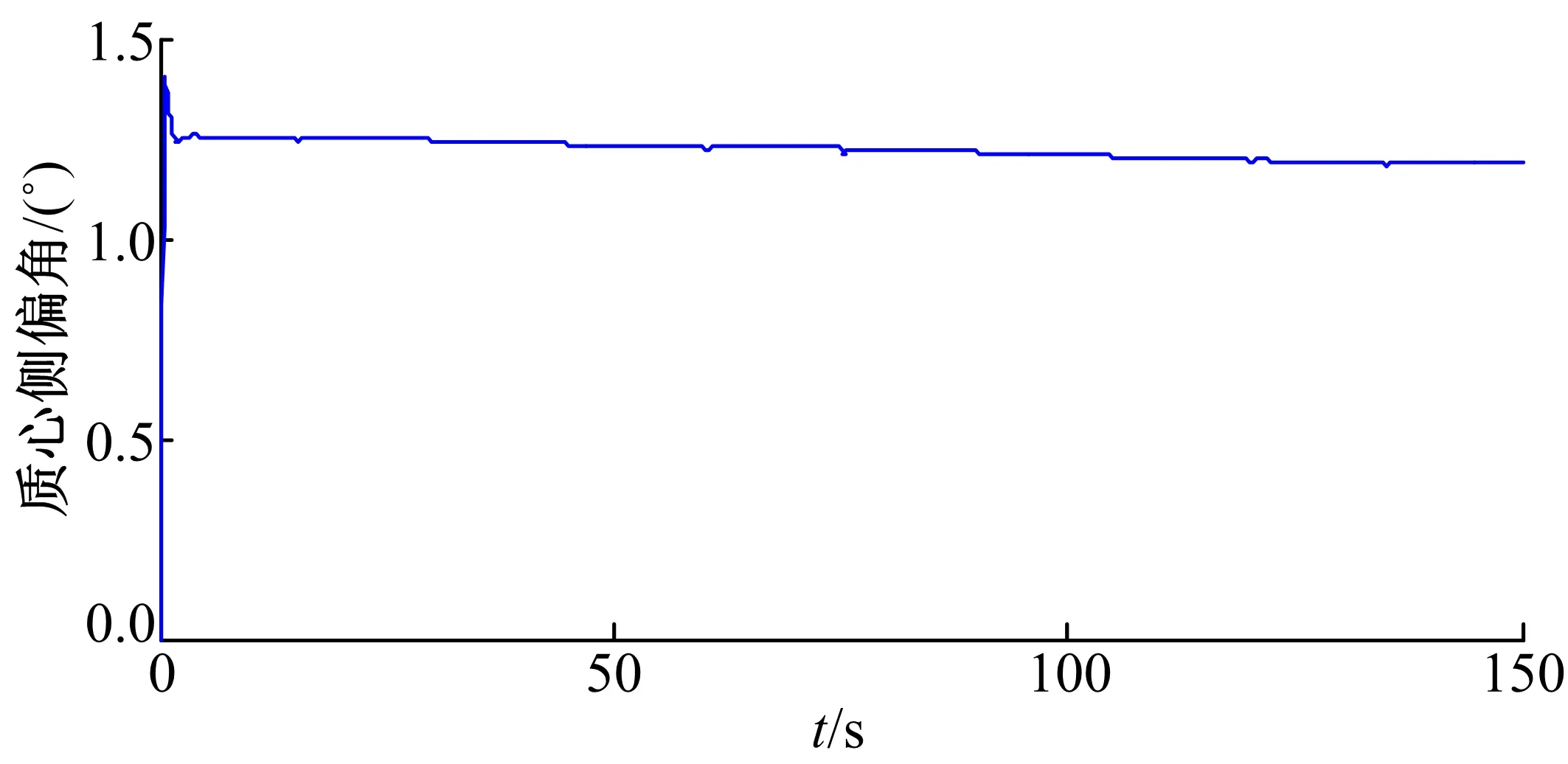
圖13 質心側偏角曲線Fig.13 Curve of sideslip angle
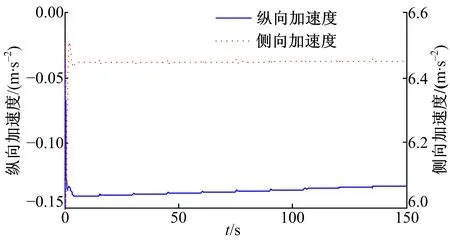
圖14 縱向加速度和側向加速度曲線Fig.14 Curve of longitudinal acceleration andlateral acceleration
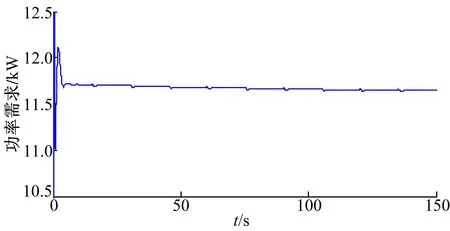
圖15 電機總功率需求Fig.15 Total electric power consumption
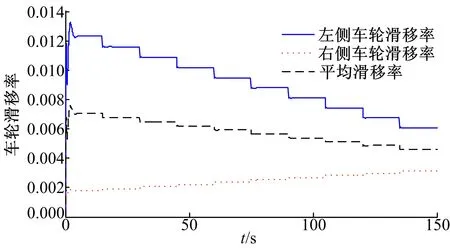
圖16 車輪滑移率Fig.16 Wheel slip ratio
表1為車速50 km/h、不同轉彎半徑下的能耗情況。本節的仿真不考慮電機工作點變化所帶來的電機效率變化。
為了便于理解,表中能耗為車輛的等效百公里能耗,即車輛維持定圓行駛100 km的能耗。從表1可以看出,轉矩分配系數越大,車輛的等效百公里能耗越低,即轉矩的輪間分配可以有效減小車輛的轉彎阻力,從而達到節能的目的。
表2和表3分別為車速為40、30 km/h時,不同轉彎半徑的能耗情況。可知,車速越低,通過轉矩軸間分配所節約的能耗越少,這與式(19)所說明的原理一致。
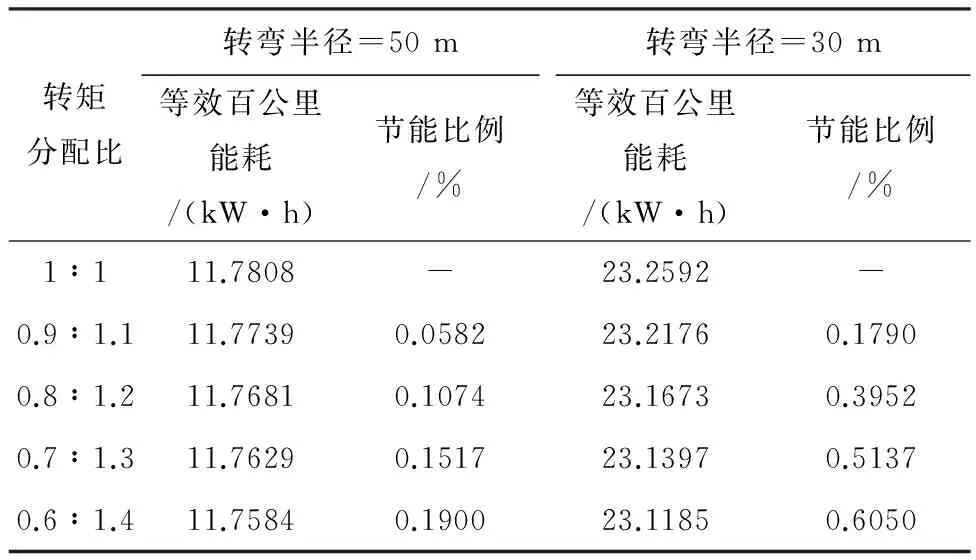
表1 車速50 km/h時不同轉彎工況能耗(不考慮電機效率)Table 1 Power consumption of cornering test withdifferent radii at 50 km/h
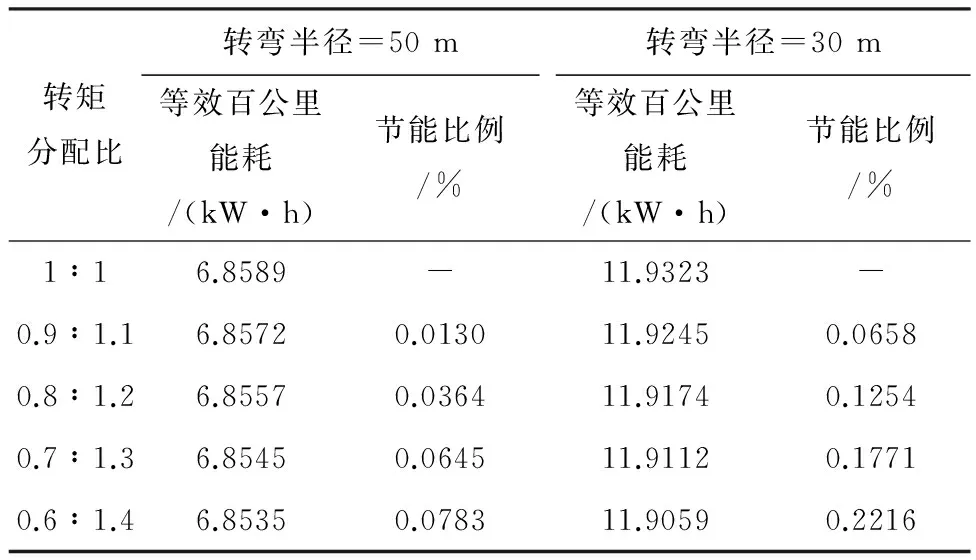
表2 車速40 km/h時不同轉彎工況能耗(不考慮電機效率)Table 2 Power consumption of cornering testwith different radii at 40 km/h
表3車速30km/h時不同轉彎工況能耗(不考慮電機效率)
Table3Powerconsumptionofcorneringtestwithdifferentradiiat30km/h
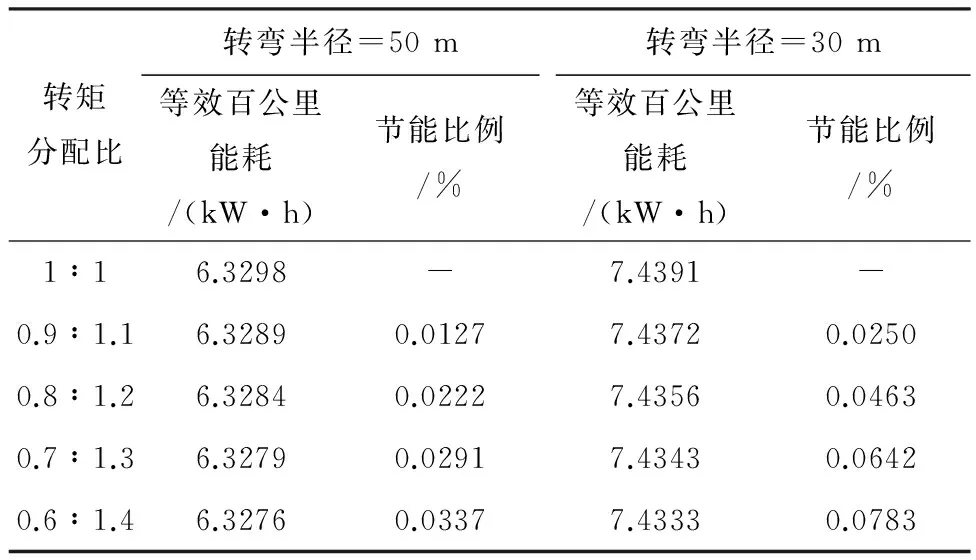
轉矩分配比轉彎半徑=50m轉彎半徑=30m等效百公里能耗/(kW·h)節能比例/%等效百公里能耗/(kW·h)節能比例/%1∶16.3298-7.4391-0.9∶1.16.32890.01277.43720.02500.8∶1.26.32840.02227.43560.04630.7∶1.36.32790.02917.43430.06420.6∶1.46.32760.03377.43330.0783
4.3 帶有電機MAP的定半徑圓周實驗
根據上文的分析,對車輛進行輪間轉矩分配,可以有效降低車輛的轉彎阻力,從而節約車輛轉彎過程中的能耗。根據上一節的仿真可以發現,在改變車輪需求轉矩的同時,輪轂電機的電機工作點也將發生變化。因此本節將討論電機MAP對能耗的影響,并進行了一系列與4.2節類似的仿真實驗,表4和表5為仿真結果。表4的最后一行為通過遺傳算法得出的最佳轉矩分配比。

表4 車速50 km/h下不同轉彎工況能耗(考慮電機效率)Table 4 Power consumption of cornering testwith different radii at 50 km/h
結合表4和圖3的電機MAP圖,當車速為50 km/h進行半徑50 m轉彎仿真時,電機的初始工作點位于低效區,隨著轉矩分配系數的增大,左側電機的工作點仍處于低效區,但右側電機的工作點進入高效區,因此整體呈現出更大的節能效果。當車速為50 km/h進行半徑30 m轉彎仿真時,電機的初始工作點就位于高效區附近,隨著轉矩逐漸從左側車輪轉移至右側車輪,左輪的電機工作點逐漸進入低效區,而右側的電機工作點仍處于高效區,總的電機能耗呈現出增加的趨勢。
表5所示的工況與表4的第一組數據相類似,由于電機的初始工作點位于低效區,當轉矩從左側車輪向右側車輪轉移的過程中,右側電機的工作點向高效區移動,因此總的能耗呈現逐漸下降的趨勢。
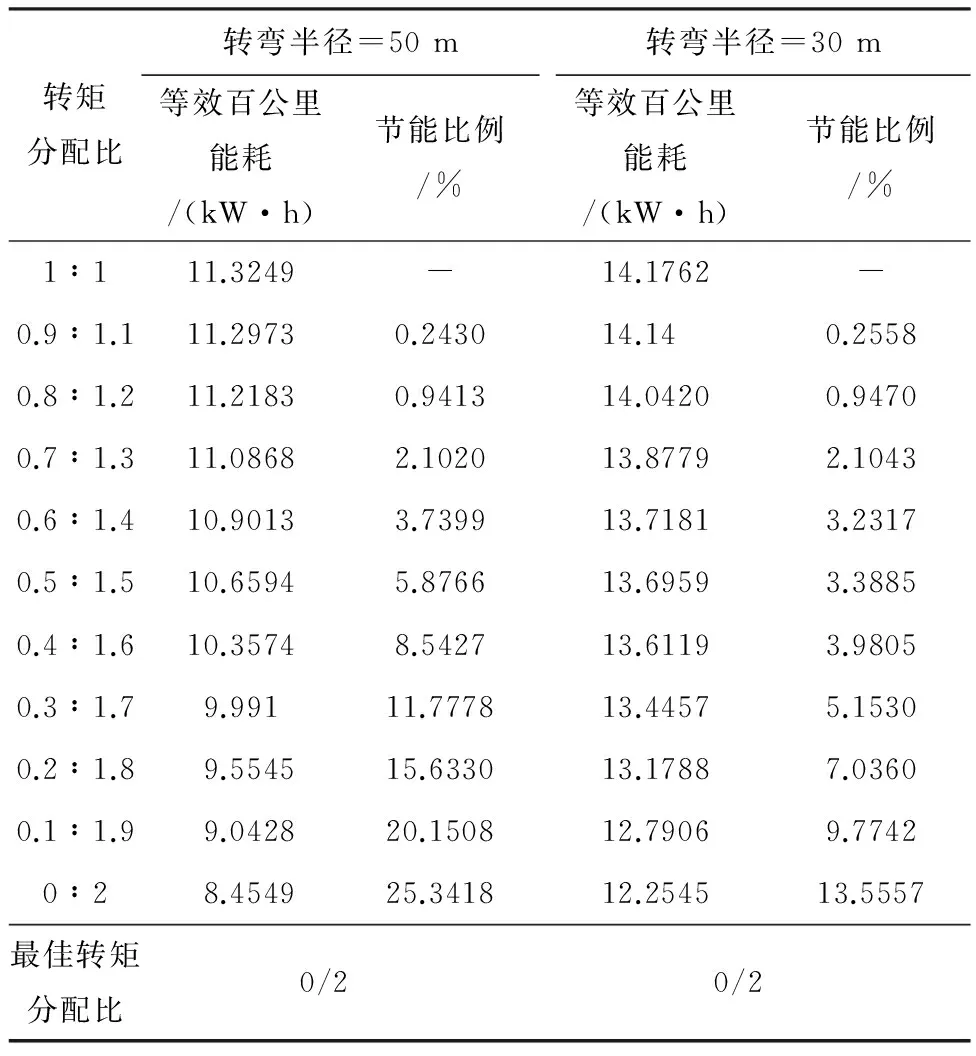
表5 車速40 km/h下不同轉彎工況能耗(考慮電機效率)Table 5 Power consumption of cornering testwith different radii at 40 km/h
對比4.2節和4.3節的仿真實驗,各個不同工況下的能耗可以通過表6得出。
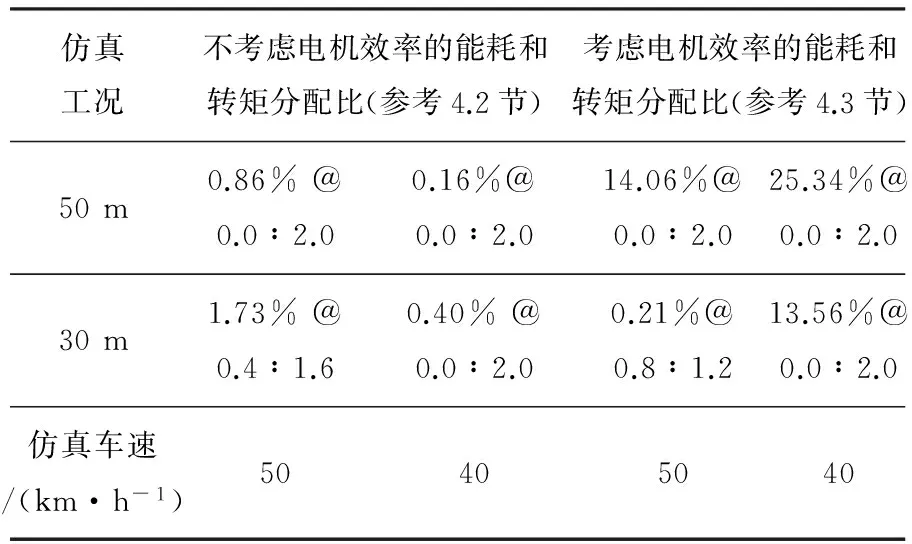
表6 不同車速和轉彎半徑下最佳能耗及轉矩分配比Table 6 Energy conservation comparison of cornering testwith different radii at different speedsbetween two optimization conditions
表6的第1列為不考慮電機效率變化的能耗情況,可以看出,外側車輪的轉矩越大,總能耗越低。但轉矩分配比例的極限值由車輛穩定性來約束。同時類似主動控制系統,在轉矩分配的過程中,沒有額外的能量輸出要求。對比表6左、右兩列數據可以看出,是否考慮電機效率對最終的能耗影響非常大。
5 結束語
本文通過理論分析和仿真驗證最終得出,車輛在轉彎過程中受到額外的轉彎阻力的影響,而轉彎阻力的大小與車速、轉彎半徑或前輪轉角、質心側偏角有關。因此當車輛過彎時,如果仍要維持原有車速,則需要輸出更多的驅動力矩。通過對內、外側車輪施加不同縱向力,產生橫擺力矩,可以使得車輛在保證原有的操縱穩定性的情況下,節約一定的能耗,即縱向力分配可以對車輛產生節能的效果。通過采用遺傳算法,可以在車輛不同車速、不同轉彎半徑的工況下得出最佳的轉矩分配比例,為具有左右轉矩矢量控制功能的電動汽車提供轉矩控制的依據。
[1] 羅玉潭,譚迪. 一種帶新型內置懸置系統的電動輪結構研究[J]. 汽車工程,2013,36(12):1105-1110.
Luo Yu-tan, Tan Di. A research on the hub-motor driven wheel structure with a novel built-in mounting system [J]. Automotive Engineering, 2013, 36(12):1105-1110.
[2] 孫文,王軍年,王慶年,等. 電動輪驅動系統結構設計與仿真研究[J]. 汽車工程,2016,38(3):330-336.
Sun Wen, Wang Jun-nian, Wang Qing-nian, et al. A study on the structural design and simulation of in-wheel motor drive system [J]. Automotive Engineering, 2016, 38(3):330-336.
[3] Singh B, Naidu N K S. Direct power control of single VSC based DFIG without rotor position sensor [C]∥ IEEE International Conference on Power Electronics, Drives and Energy Systems, Bengaluru, India, 2012:1-6.
[4] 余卓平,姜煒,張立軍. 四輪輪轂電機驅動電動汽車扭矩分配控制[J]. 同濟大學學報:自然科學版,2008,36(8):1115-1119.
Yu Zhuo-pin, Jiang Wei, Zhang Li-jun. Torque distribution control for four wheel in-wheel-motor electric vehicle [J]. Journal of Tongji University (Natural Science), 2008, 36(8):1115-1119.
[5] Koichi Ono. Electric drive system forsport hybrid SH-AWD [C]∥SAE Paper, 2014-01-1821.
[6] 盧東斌,歐陽明高,谷靖, 等. 四輪驅動電動汽車永磁無刷輪轂電機轉矩分配[J]. 清華大學學報:自然科學版,2012, 52(4):451-456.
Lu Dong-bin,Ou-yang Ming-gao, Gu Jing, et al. Torque distribution algorithm for a permanent brushless DC hub motor for four-wheel drive electric vehicle [J]. Journal of Tsinghua University(Sci & Tech), 2012, 52(4):451-456.
[7] Kiumars Jalali, Thomas Uchida, Steve Lambert, et al. Development of an advanced torque vectoring control system for an electric vehicle with in-wheel motors using soft computing techniques [C]∥SAE Paper, 2013-01-0698.
[8] Christophe Moure, Klaus Kersting. Development of functional safety in a multi-motor control system for electric vehicles[C]∥SAE Paper, 2012-01-0028.
[9] Athari Abtin, Fallah Saber, Li Bin, et al. optimal torque control for an electric-drive vehicle with in-wheel motor: implementation and experiments [C]∥ SAE Paper, 2013-01-0674
[10] Jin L Q, Liu Y. Study on adaptive slid mode controller for improving handling stability of motorized electric vehicles [J]. Mathematical Problems in Engineering, 2014, 2014:1-10.
[11] Shibahata Y, Shimada K, Tomari T. Improvement of vehicle maneuverability by direct yaw moment control [J]. Vehicle System Dynamics, 1993, 22(5/ 6): 465-481.
猜你喜歡
天水行政學院學報(2022年4期)2022-11-18 09:02:36
艦船科學技術(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
中學生數理化·中考版(2018年10期)2018-12-07 00:44:52
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學院學報(2017年1期)2017-04-16 05:34:07
中國衛生(2014年12期)2014-11-12 13:12:40
