熱電偶時間常數(shù)測試中階躍溫升信號的研究
2018-03-10 02:19:40段向港郝曉劍
激光技術(shù) 2018年2期
關(guān)鍵詞:系統(tǒng)
段向港, 郝曉劍,2*
(1.中北大學(xué) 電子測試技術(shù)國家重點實驗室, 太原 030051; 2.中北大學(xué) 儀器科學(xué)與動態(tài)測試教育部重點實驗室, 太原 030051)
引 言
熱電偶由于性能穩(wěn)定、經(jīng)濟(jì)耐用和測溫范圍廣等優(yōu)點,廣泛應(yīng)用于生產(chǎn)生活各個領(lǐng)域,其測量結(jié)果及精度與熱電偶的動態(tài)特性密切相關(guān)。時間常數(shù)作為熱電偶動態(tài)特性最重要的指標(biāo),是判斷熱電偶質(zhì)量和使用范圍的重要物理量,因此對其準(zhǔn)確測量尤為重要[1 -4]。傳統(tǒng)的投入實驗法、熱風(fēng)洞法具備操作方便、可重復(fù)度高的優(yōu)點,但是也存在機(jī)械結(jié)構(gòu)速度慢,會產(chǎn)生人為的不可避免誤差等一系列缺點[5-6]。激光是一種特殊的可控電磁波,TASHIRO等學(xué)者首次將其用于傳感器的動態(tài)校準(zhǔn)中[7],其后WANG,YANG等人不斷完善測試?yán)碚摚瑸闊犭娕紩r間常數(shù)測量提供了一種新的測試方法[8-9]。激光具有能量極高(通過光學(xué)聚焦,匯聚一點的激光能量可大于1012W/cm2)、上升時間短等顯著優(yōu)點,采用激光激勵熱電偶可獲得較為理想的階躍溫升信號,保證了熱電偶的均勻加熱[10]。
本文中采用上升時間5μs、功率500W的大功率半導(dǎo)體激光器,分析了測試熱電偶時間常數(shù)的理論基礎(chǔ),采用反饋控制激光功率的方法,產(chǎn)生穩(wěn)定的階躍溫升信號,通過限定激光器功率大小,成功測量出OMEGA公司的4支熱電偶的時間常數(shù),為準(zhǔn)確測量熱電偶的時間常數(shù)提供參考[11-14]。
1 熱電偶時間常數(shù)的理論基礎(chǔ)
由于影響熱電偶時間常數(shù)測試的因素很多且復(fù)雜,這些因素不能量化用于公式推導(dǎo),因此難以用理論計算的方法獲得準(zhǔn)確的數(shù)值[15-16]。通常采用實驗法得到熱電偶時間常數(shù),把熱電偶傳遞函數(shù)按照一階系統(tǒng)處理,給予一個溫度階躍信號對其進(jìn)行動態(tài)測試,當(dāng)熱電偶吸熱與散熱達(dá)到一個平衡時,從響應(yīng)曲線上直接獲取,響應(yīng)曲線如圖1所示。

Fig.1 Diagram of thermocouple time constant test
圖1中,T0表示熱電偶測溫端初始溫度,一般為環(huán)境溫度;Te為階躍溫度值,熱電偶測溫端穩(wěn)定后通過讀數(shù)可知;t1表示初始溫度響應(yīng)時刻;t2為初始溫度T0與階躍溫度Te的差值達(dá)到63.2%對應(yīng)的時刻。用τ表示熱電偶時間常數(shù),是指溫度達(dá)到溫升階躍量63.2%所用的時間(即τ=t2-t1)。
2 時間常數(shù)測試系統(tǒng)及階躍溫升信號控制方法
2.1 熱電偶時間常數(shù)測試系統(tǒng)
熱電偶時間常數(shù)測試系統(tǒng)由半導(dǎo)體激光器產(chǎn)生動態(tài)階躍溫升信號,激光激勵熱電偶的表面,引起其表面瞬態(tài)溫升,從而直接測量出熱電偶的時間常數(shù)。時間常數(shù)測試系統(tǒng)如圖2所示。紅外探測模塊和被測熱電偶分別置于橢球面反射鏡的兩個共軛焦點上,為了避免二者的直接輻射熱傳遞,加入一個隔熱塊。半導(dǎo)體激光器輸出激光經(jīng)過透鏡聚焦后激勵被測熱電偶,另一焦點上的高速紅外探測模塊實時檢測熱電偶表面溫度變化,反饋控制模塊根據(jù)系統(tǒng)輸出溫度和期望值溫度的偏差實時調(diào)節(jié)半導(dǎo)體激光器驅(qū)動電源電流,以確定加熱功率,獲得被測熱電偶溫度-時間曲線,從而獲得熱電偶時間常數(shù)。由于高速紅外探測模塊的頻率響應(yīng)特性優(yōu)于被測熱電偶的頻率響應(yīng)特性,以前者的響應(yīng)作為真值來校準(zhǔn)后者并獲得動態(tài)誤差。

Fig.2 Schematic diagram of thermocouple time constant test system
2.2 熱電偶時間常數(shù)測試系統(tǒng)階躍溫升信號控制方法
在本測試系統(tǒng)中,由于半導(dǎo)體激光器輸出激光過程中功率恒定,激光輸出連續(xù),熱電偶測溫端隨著溫度升高,不僅對激光吸收效率發(fā)生變化,而且自身進(jìn)行熱輻射與熱傳導(dǎo)等也發(fā)生變化,造成熱電偶輸出經(jīng)快速上升后會持續(xù)緩慢上升,停止出光后迅速下降,無法確定最后階躍量,難以評估熱電偶時間常數(shù),熱電偶輸出曲線如圖3所示。
熱電偶時間常數(shù)測試系統(tǒng)利用功率階躍變化的激光加熱被測熱電偶,熱電偶輸出曲線會不斷上升,并非溫度階躍變化,所以可通過閉環(huán)反饋控制激光功率實現(xiàn)溫度階躍。采用高速紅外探測模塊實時監(jiān)測熱電偶測溫端表面溫度變化,將探測器所得的實時探測數(shù)據(jù)反饋輸入端。采用比例-積分-微分(proportion-integral-derivative,PID)閉環(huán)控制系統(tǒng),跟據(jù)系統(tǒng)輸出溫度和期望值溫度的偏差,通過PID控制器對系統(tǒng)偏差的比例微分積分作用線性加權(quán)和來消除此誤差;半導(dǎo)體激光器輸出功率與輸入電流基本成線性關(guān)系,反饋控制模塊根據(jù)紅外探測器輸入實時調(diào)節(jié)半導(dǎo)體激光器驅(qū)動電源的輸出電流,通過控制驅(qū)動電源輸出電流來線性控制半導(dǎo)體激光器輸出功率,動態(tài)調(diào)節(jié)激光器的輸出功率以確定激光器加熱功率,使熱電偶的表面溫度以最快速度上升,達(dá)到期望的溫度后,通過調(diào)節(jié)激光器驅(qū)動電流,適當(dāng)降低激光器的輸出功率,以實現(xiàn)在熱電偶測溫端出形成定量階躍溫度的目標(biāo),使被測熱電偶得到期望的平衡溫度,反饋控制過程如圖4所示。

Fig.3 Curve of thermocouple output

Fig.4 Block diagram of feedback control
在PID控制中,PID的參量調(diào)整是PID控制器設(shè)計的核心。實際系統(tǒng)由于有各種非線性,例如PID控制器的飽和非線性(對輸出的限幅作用),可以較容易地觀測到等幅振蕩,這種振蕩一般就是設(shè)定值上下的等幅振蕩,根據(jù)控制經(jīng)驗通過對被控過程的運(yùn)行特性分析從而可以確定出較理想的控制器參量。本系統(tǒng)中PID調(diào)試方法采用常用的擴(kuò)充臨界比例度法,在不用確定系統(tǒng)具體數(shù)學(xué)模型的情況下,經(jīng)過多次實驗得到系統(tǒng)的最佳整定參量。經(jīng)過反復(fù)實驗后,根據(jù)最佳的實驗效果,最終確定PID反饋控制系統(tǒng)的參量:設(shè)置比例系數(shù)Kp=2.3,積分系數(shù)Ki=0.2以及微分系數(shù)Kd=2.4。
3 測試結(jié)果分析
在室溫12℃、濕度30%、大氣壓強(qiáng)101.325kPa的環(huán)境下對4支OMEGA公司的熱電偶進(jìn)行時間常數(shù)的測試,熱電偶的詳細(xì)參量如表1所示。表中K表示鎳鉻-鎳硅熱電偶,J表示鐵-康銅熱電偶,E表示鎳鉻-銅鎳熱電偶。熱電偶的實物圖如圖5所示。

Table 1 Basic parameters of thermocouple

Fig.5 Pictures and models of 4 thermocouples
經(jīng)過透鏡聚焦后的半導(dǎo)體激光器在全量程(500W)輸出時,聚焦后的激光可使熱電偶溫度接近2000℃,鑒于4支熱電偶的測溫范圍,設(shè)置激光器輸出功率100W,在同等條件下對KQXL-18U-6型、TJ36-ICSS-18U-6型、TJ36-CASS-18U-6型及TJ36-CXSS-18U-6型4支熱電偶進(jìn)行時間常數(shù)測量。熱電偶測試波形如圖6所示。

Fig.6 Time constant response curve of 4 thermocouples
a—KQXL-18U-6 b—TJ36-ICSS-18U-6 c—TJ36-CASS-18U-6 d—TJ36-CXSS-18U-6
在同等條件下,采用ADLINK公司的PCI8554數(shù)據(jù)采集卡,采集熱電偶電壓輸出曲線,對測試結(jié)果進(jìn)行小波降噪處理,得到熱電偶時間常數(shù)曲線如圖6所示。根據(jù)以上時間常數(shù)曲線,可以得到4支熱電偶的時間常數(shù)如表2所示。
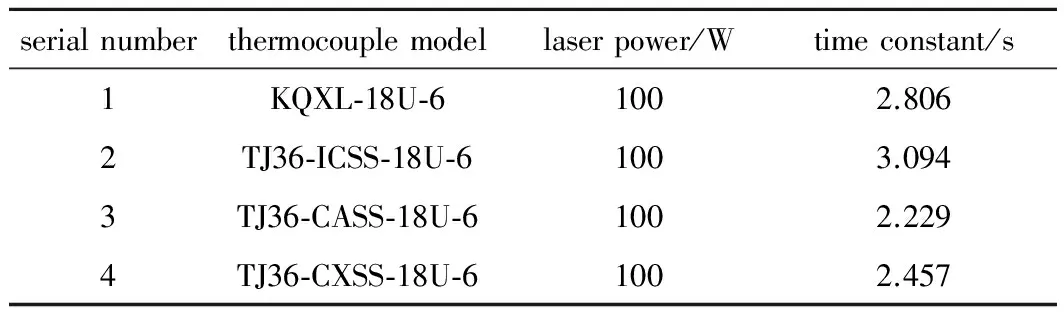
Table 2 Thermocouple test results
4 結(jié) 論
采用半導(dǎo)體激光器作為激勵源,使用反饋控制激光功率的方法產(chǎn)生階躍溫升信號,在限定輸出功率100W時,得到了熱電偶時間常數(shù)曲線,從曲線直接讀取出4支熱電偶的時間常數(shù)。實驗結(jié)果證明,熱電偶時間常數(shù)測試系統(tǒng)可產(chǎn)生較理想的階躍溫升信號,控制器動態(tài)性能和抗干擾性能較好,為熱電偶時間常數(shù)的測量提供了一個穩(wěn)定的測試平臺;實驗結(jié)果為激光器高功率高溫條件下對快速響應(yīng)、大量程熱電偶時間常數(shù)的測量和反饋控制提供了指導(dǎo)。
[1] TANG W B. Research on dynamic response rule of thermocouple for one type of turboprop engines combustor[D]. Nanjing:Nanjing University of Aeronautics and Astronautics,2013:15-40(in Chinese).
[2] LIU Y, WU Sh, ZHAO Y G. Research and developing status on temperature sensor of thermocouple[J]. China Instrumentation, 2003,23(11):1-3(in Chinese).
[3] ZHAO Y Sh, YANG L H. Research progress of thin film thermocoupletemperature sensor[J]. Transducer and Microsystem Technologies,2012,31(2):1-3(in Chinese).
[4] LIU H. Discussion on thermocouple temperature measurement principle and its application[J]. Science-Technology & Enterprise,2014,23(2):258(in Chinese).
[5] FANG L D, ZHANG J K, WANG N,etal. Study of dynamic response on characteristics of K-type thermocouple[J]. Electronic Measurement Technology, 2010, 24(11):18-20(in Chinese).
[6] WU F, YANG X Y, WANG L. Study on measuring time constants of surface temperature sensors[J]. Measurement Technique, 2014,58(4):60-62(in Chinese).
[7] TASHIRO Y,BIWA T,YAZAKI T.Calibration of a thermocouple for measurement of oscillating temperature[J].Review of Scientific Instruments,2005,76(12): 24901-24905.
[8] WANG S T, ZHAO J, JIN Zh T. Uncertainty analysis of time constant measurement of sapphire fiber blackbody cavity[J].Industrial Measurement, 2013,23(3):53-54(in Chinese).
[9] YANG Y, HAO X J, WU Y Y. Nonlinear fitting method based on dynamic calibration of thermocouples[J]. Laser Technology, 2014, 38(2):145-148(in Chinese).
[10] WANG R, HAO X J, ZHOU H Ch,etal. Design of infrared signal detection circuit in a temperature calibration system[J]. Laser Technology, 2013,37(2):247-250(in Chinese).
[11] MA X Y, WANG J, LIU S P. Research and application of domestic high power semiconductor lasers[J]. Infrared and Laser Engineering, 2008, 37(2): 189-194(in Chinese).
[12] LIU B, HUANG Zh H,CAI H Y,etal.Design of driving system of quasi continuous wave laser diode based on differential amplifier circuit[J]. Laser Technology,2015,39(2):166-169(in Chinese).
[13] HAO X J, ZHOU H Ch, LI K J. Application of CO2laser to response time measurement to surface[J]. Chinese Journalof Scientific Instrument, 2007,28(6):1040-1044(in Chinese).
[14] QI M Y, DING J, YANG S L,etal.Simulation research on thin-film thermocouple temperature sensor dynamic character calibration[J]. Computer Simulation,2016,33(6):325-330(in Chinese).
[15] TENG Sh L, KONG X M. Test system of time constant based on step temperature response[J]. China Measurement & Test,2011,37(1):24-27(in Chinese).
[16] XU L X, XIE J B, YANG Zh W,etal. Preparation of micro thermocouple and calibration method of time constant[J]. Journal of Electronic Test and Instrument, 2016, 30(7):1023-1028(in Chinese).
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32