J型鋪管船動力定位性能研究
2018-03-12 07:44:56陳熠畫陳新權沈海澎王文濤
艦船科學技術 2018年2期
陳熠畫,陳新權,楊 啟,2,沈海澎,王文濤
(1. 上海交通大學 船舶海洋與建筑工程學院 高新船舶與深海開發裝備協同創新中心 海洋工程國家重點實驗室,上海 200240;2. 上海交通大學海洋水下工程科學研究院有限公司,上海 200231;3. 上海振華重工(集團)股份有限公司,上海 200125)
0 引 言
J型鋪管法非常適合于深海、超深海海底管道鋪設,管道幾乎以垂直的位置離開船舶,并且具有J型的管道形狀。由于其作業水深一般較大,錨泊定位不再適用,要求船舶配備動力定位系統,能夠憑借自身推進器推力抵抗外界環境載荷以及作業載荷,以保持船舶位置與首向。擁有動力定位系統的鋪管船無需長時間的起、拋錨過程,到達地點即可開始進行鋪管作業。在鋪管船動力系統的設計論證階段,需要考慮管線對船舶的作用,以確保船舶在進行管道鋪設也能夠滿足動力定位要求。
國外對動力定位鋪管船的研究開展較早。 Brink A和Jin C[1]對動力定位輔助的采礦船進行了鋪管作業的可行性研究。E.A. Tannuri和C.P.Pesce[2]研究了在已有的鋪管駁船上加裝動力定位系統,并進行了模型試驗。Cédric Brun等[3]研究了鋪管船在進行鋪管作業時對靜態定位能力的影響。國內對鋪管船的研究開展較晚,目前尚未有自主設計的J型鋪管船,但已有不少學者開展了研究。王川等[4]開發了鋪管船動力定位能力評估系統,并對極端海況下提出了優化輔助方案。謝文博等[5]建立了J型半潛式起重鋪管船的非線性船舶運動數學模型以及環境模型,對鋪管船定位作業的過程進行建模及分析。施小成等[6]利用被動非線性觀測器來濾波,采用終端滑模控制器進行航跡追蹤,建立了水平面動力定位船舶運動模型,海洋干擾力模型以及J型鋪管模型。
本文以J型鋪管船為研究對象,對船舶動力定位能力進行分析,在此基礎上對鋪管作業對船舶動力定位能力影響進行研究,得到了J型鋪管船的靜態定位能力(風速包絡線與推力使用率包絡線),確定了在不同方向下鋪管船能夠抵抗的極限載荷,以及在作業工況下不同方向上的推力使用率。在時域中對動力定位控制的J型鋪管船的真實運動進行實時模擬,獲得了定位精度等信息。研究了不同鋪管角度下進行管道鋪設時對推力使用率包絡線的影響,并在時域中對進行鋪管作業船舶的動力定位精度進行研究與比較。
1 環境載荷
1.1 主尺度、計算坐標系與環境條件
目標船舶垂線間長為127.85 m,型寬為29 m,型深為12.8 m,吃水為8.5 m,排水量為46 235 t。取隨船坐標系,坐標系原點位于重心在水線面的投影,采用右手坐標系,X軸向船首為正,Y軸向右舷為正,Z軸向上為正。計算坐標系如圖1所示。
計算環境條件見表1。
1.2 風載荷
采用API風譜估算作用在船體上的風載荷:
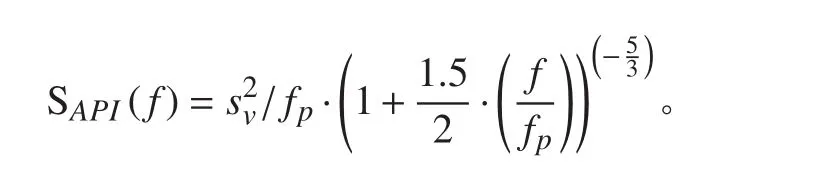
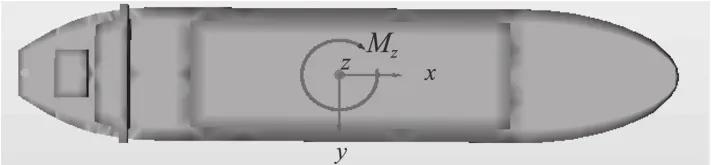
圖 1 計算坐標系Fig. 1 Coordinate system
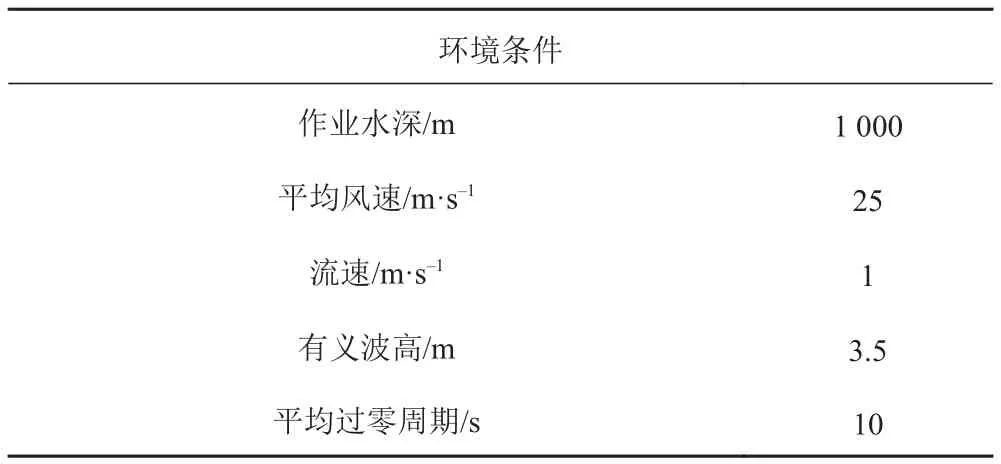
表 1 計算環境條件Tab. 1 Environment Condition
式中:f為風載荷頻率,Hz;SAPI為能力譜密度,m2/s;VW10為海平面以上10 m處的每小時平均風,m/s;fp為平均頻率(默認為0.002 5VW10);sv為脈動密度,在推薦高度10 m處sv=0.164VW10。譜密度可見圖2。
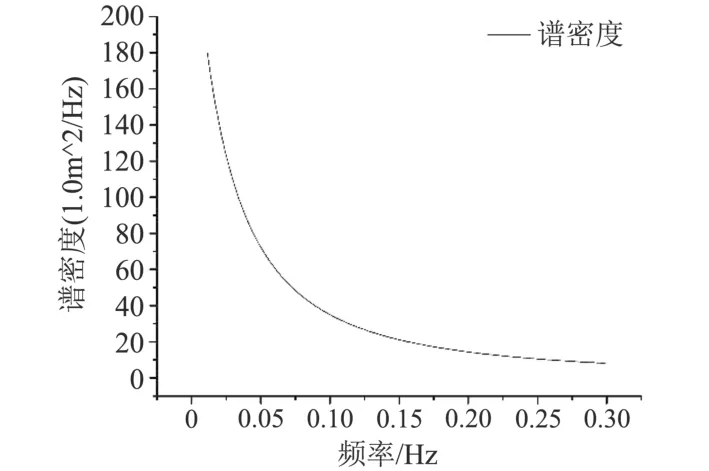
圖 2 API譜密度Fig. 2 Spectral density of API
1.3 波浪載荷
對于主船體采用三維勢流理論計算波浪載荷,求解滿足流場控制方程的格林函數獲得速度勢,在頻域中求解運動方程以確定附加質量系數、阻尼系數、運動響應和波浪力。利用水動力系數求解鋪管船的時域運動方程以確定船舶運動與受力。船舶濕表面模型如圖3所示。
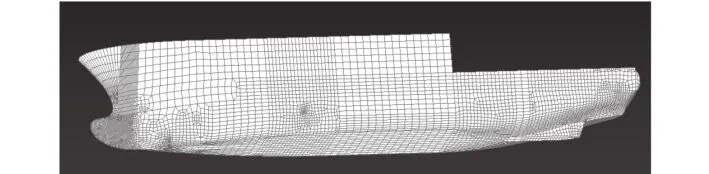
圖 3 船舶濕表面模型Fig. 3 Ship wet surface model
采用Pierson-Moskowitz譜計算作用在船體上的波浪載荷。P-M譜表達式為:
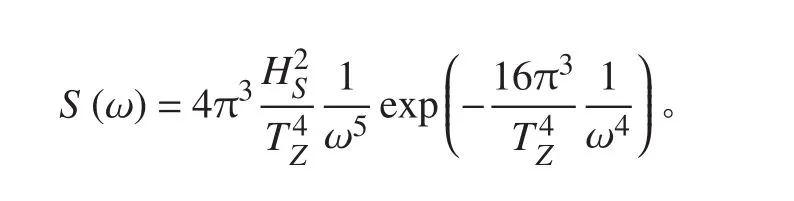
一階波浪力引起的船體在平衡點附近做往復運動,動力定位系統不可能也無需抵消一階波浪力。因此,動力定位中只平衡波浪二階漂移力、風載荷、流載荷。對于波浪載荷主要關注二階波浪慢漂力,根據紐曼近似來計算:
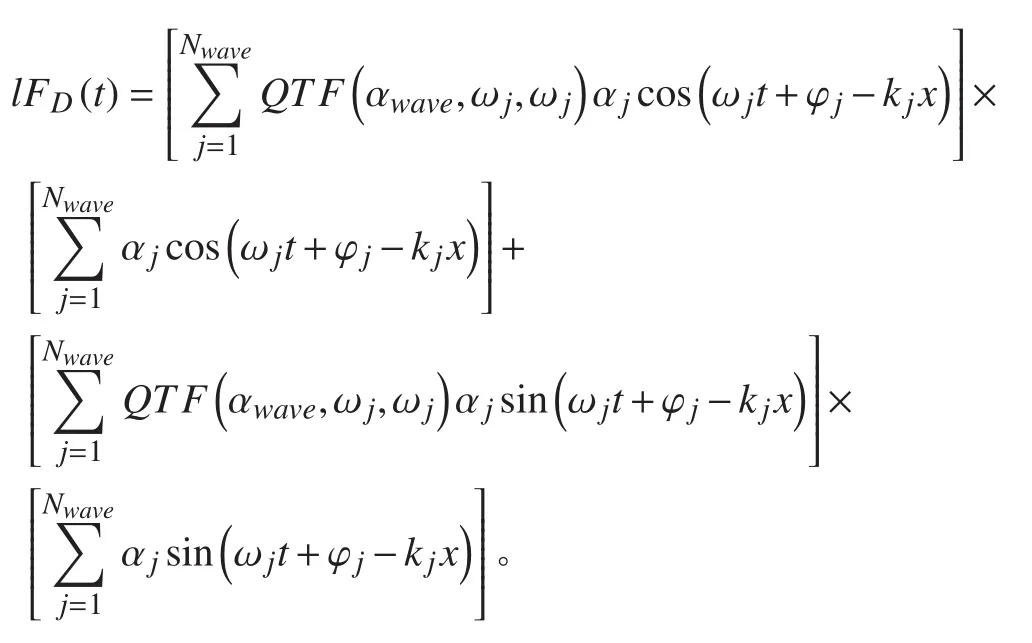
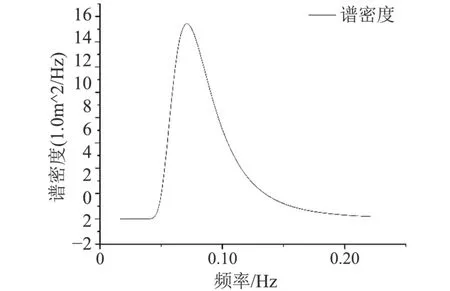
圖 4 P-M波浪譜密度Fig. 4 P-M wave spectrum density
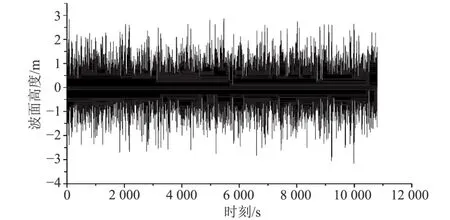
圖 5 P-M譜波面時歷曲線Fig. 5 Wave surface time history for P-M Spectrum
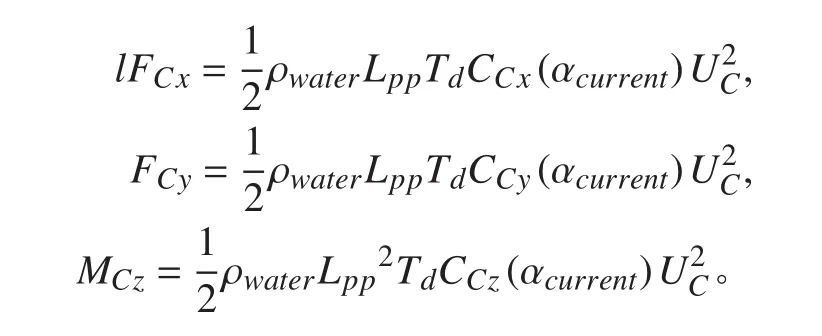
1.4 流載荷
流載荷根據OCIMF估算:
2 動力定位計算模型
動力定位模型由Kalman濾波器、PID控制器以及推力分配算法組成。Kalman濾波器估計低頻載荷值大小,聯合已知的風載荷來決定鋪管船的低頻速度與位置分量,由此過濾掉波頻分量。將預估位置與設定位置比較,將此差值與低頻速度、PID增益值輸入控制器,以決定為了維持船位與首向所需的推力大小和方向。將推力指令輸入推力分配算法,以確定每個推進器在每個時刻所要發出的推力大小與方向。
2.1 控制系統
J型鋪管船在外力作用下的水平面低頻運動方程為:

其中:M為船舶質量矩陣;為附加質量矩陣;t為求解方程的時刻;為t時刻的船舶水平低頻位置;B為船舶線性阻尼矩陣;為t時刻施加在鋪管船上的低頻載荷。
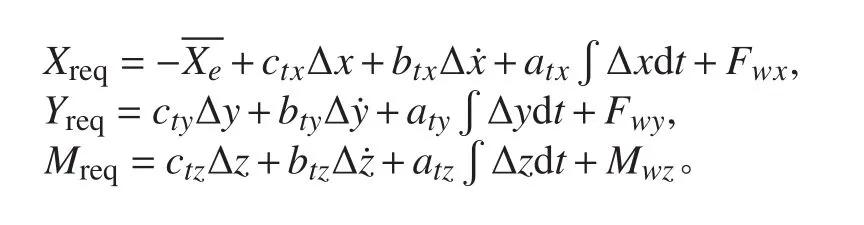
PID控制器根據船位與設定位置的差值以及風前饋信息來決定推力大小:
2.2 推進系統
J型鋪管船的動力定位系統由3個全回轉推進器和2個側推器組成,推進器編號、命名、類型和位置如表2所示, 推進器布置如圖6所示。
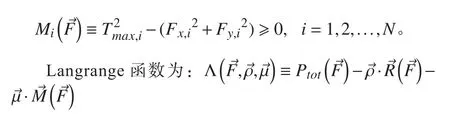
采用基于Lagrange乘數法的優化推力分配算法[7],拉格朗日函數不僅代表所有推進器提供的總推力,也限制了推力飽和值和全回轉推進器的禁止角。推力分配算法的目標是使得推進器消耗的功率最優,及尋找各個推進器狀態分量使得目標函數推進器總功率最小,并且滿足下列限制條件:
橫向力、縱向力和首搖力矩滿足要求:
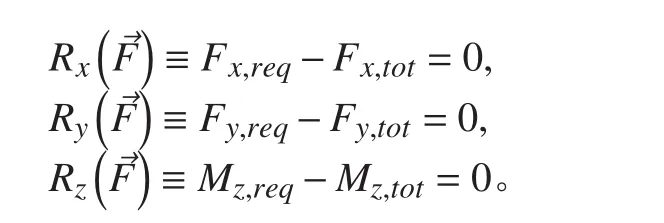
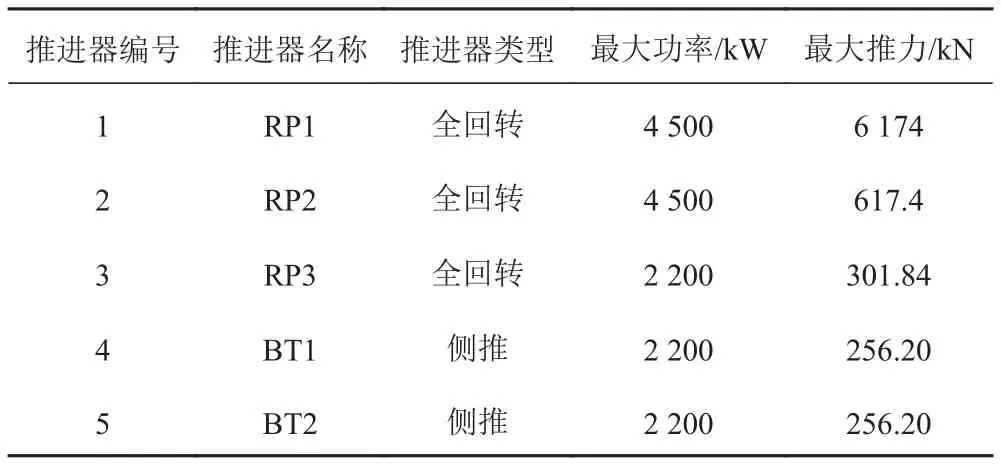
表 2 推進系統概況Tab. 2 General information of thrust system
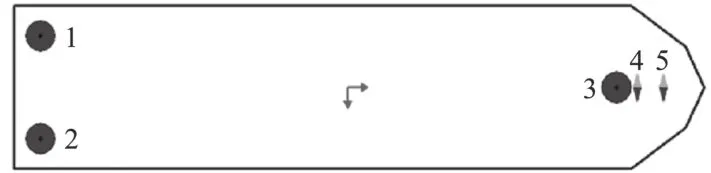
圖 6 推進器布置Fig. 6 Thruster arrangement
推力受到最大推力限制:
為了達到最優必須滿足:

3 動力定位能力分析
3.1 靜態定位能力分析
動力定位系統的定位能力通常用風速包絡線以及推力使用率包絡線來表示。風速包絡線表示在風、浪、流共同作用下可以滿足定位要求即船位與首向的極限環境條件。計算中風、流、浪設定為同向,給定流速,計算初始風速與波浪參數下對應的推進器推力,不斷增大風速直到推進器達到滿負荷情況。通過改變環境載荷方向,可以得到各個風向上的風速極值,由此得到風速包絡線。
風速包絡線如圖7所示。由圖可知,當推力系統完好,推進器正常工作時,定位能力為可抵抗27.41 m/s的風速,定位能力最差的方向為70°與80°。不同風向上的定位能力差距較大,迎浪以及隨浪方向附近定位能力好,橫浪方向附近定位能力相對較差。
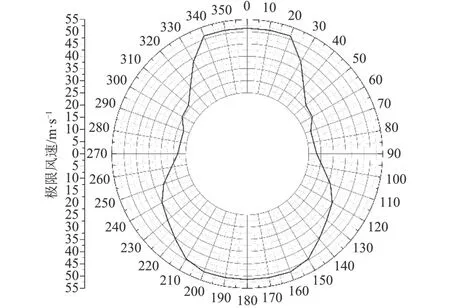
圖 7 風速包絡線圖Fig. 7 Wind limit
推力使用率包絡線表示在確定的風、浪、流環境條件下保持定位要求時推進器的推力使用率。計算中風、浪、流設定為同向,對每一個方向,根據設定的環境條件,即規定的流速、平均風速、對應波譜計算出為了保持船位以及船舶首向所需的推力數據,計算推進器與其最大推力的比值,獲得該風向的推力利用率。改變環境載荷方向,得到各個方向上的推力利用率,由此得到推力利用率包絡線。當每個方向上所有推進器的推力利用率均小于等于100%,船舶才可以在這個環境條件下保持船位和首向穩定。
推力使用率包絡線曲線如圖8所示。由圖可知,在每個環境載荷方向上,推力使用率皆小于100%,在該環境條件下可以達到定位要求。不同的環境載荷方向上,推進器使用率相差較大,70°的定位能力相對最差,推力使用率最高為84.33%;180°的定位能力相對最好,推力使用率最低為24.78%。
3.2 時域動態定位能力分析
動力定位動態模擬是對動力定位控制的J型鋪管船的真實運動進行實時模擬。與動力定位能力曲線相比,時域模擬動力定位控制下的J型鋪管船可以考慮更多限制條件與相關因素, 獲得動力定位精度等信息。
以浪向0°為例,給出J型鋪管船動態時域模擬結果。橫蕩、縱蕩、首搖的時歷曲線分別如圖9、圖10和圖11所示。綜合各個浪向情況,J型鋪管船在動力定位系統作用下,橫蕩、縱蕩范圍都在3 m以內,定位精度可達3‰水深,遠低于常規2%~3%水深要求,首搖可控制在3°以內。設計定位系統在設定的環境條件下可達較高的定位精度。
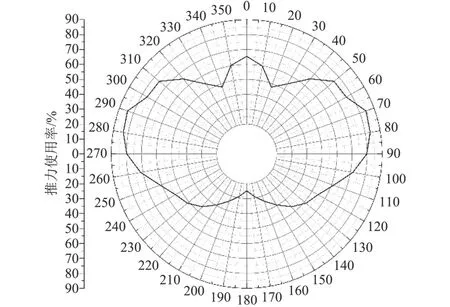
圖 8 推力使用率包絡線Fig. 8 Thrust utilization
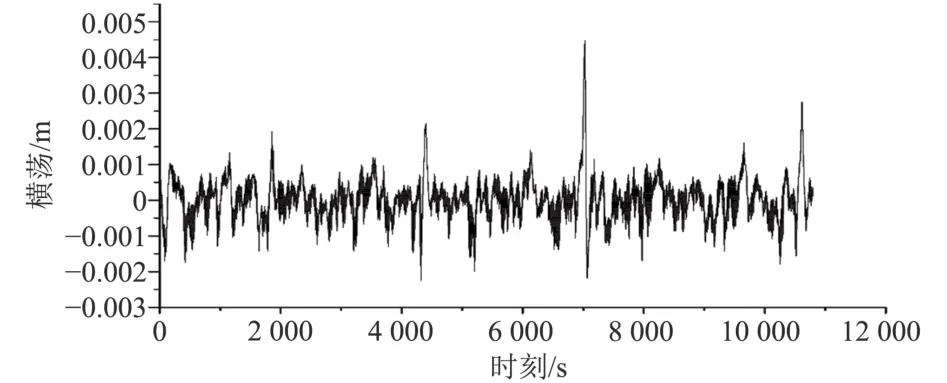
圖 9 橫蕩時歷曲線Fig. 9 Time series of sway
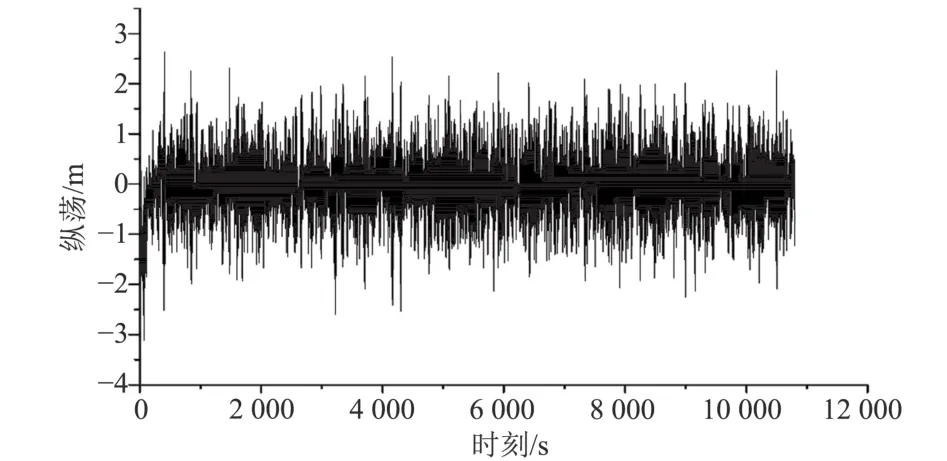
圖 10 縱蕩時歷曲線Fig. 10 Time series of surge
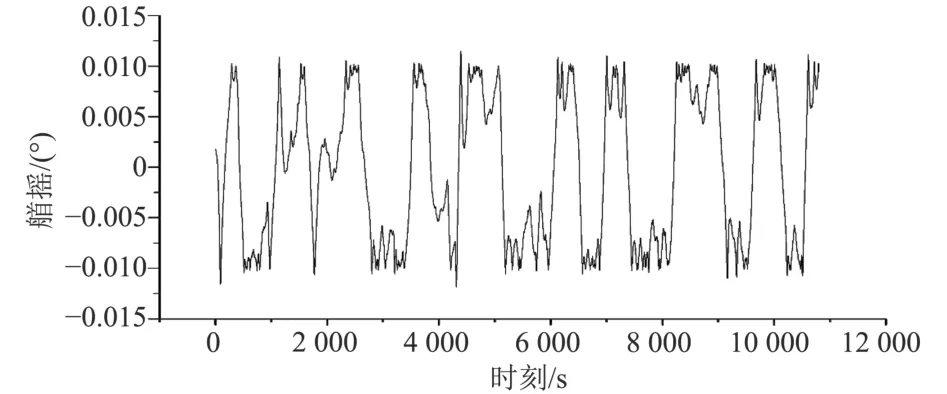
圖 11 首搖時歷曲線Fig. 11 Time series of yaw
4 鋪管作業對動力定位能力影響分析
動力定位主要考慮水平內船舶運動,即橫蕩、縱蕩、首搖,而對其他3個自由度的運動關注度較小。因此在考慮J型鋪管船進行鋪管作業時對動力定位能力的影響時,主要考慮張緊器上的水平張緊力。管線預張力假定為一個恒定的縱向作用力。這個載荷與鋪管角度有關,鋪管角度越大,縱向張緊力越小。計算分別以80°,88°進行鋪管時的推力使用率,并與不鋪管時的推力使用率作比較,如圖12所示。
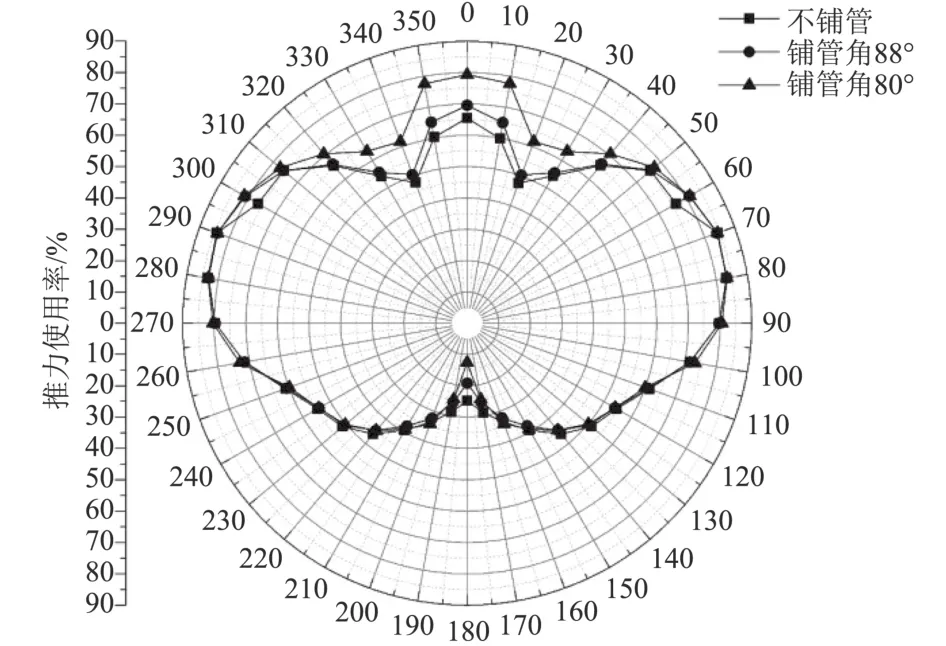
圖 12 鋪管作業對推力使用率影響Fig. 12 Influence of pipe-laying on thrust utilization
由圖可知,考慮風、浪、流的動力定位能力——推力使用率顯著受到鋪管作業的影響。鋪管作業力處于縱蕩方向,因此當船舶處于迎浪、隨浪中時,推力使用率受到鋪管作業的影響最大。迎浪中,鋪管作業力與環境載荷同向,當鋪管船進行鋪管作業時,推力使用率顯著增大即動力定位性能顯著變差,且鋪管作業角度越小,推力使用率越大。隨浪中,鋪管作業力與環境載荷反向,因此當鋪管船進行鋪管作業時,鋪設的管線相當于錨鏈,可以抵消環境載荷的作用,故推力使用率顯著減小即動力定位性能變好,且鋪管作業角度越小,推力使用率越小。當船舶處于橫浪附近時,推力使用率受鋪管作業影響不大。可見,以80°,88°進行鋪管時,推力使用率皆小于等于100%,可以滿足定位要求。
在時域中,對J型鋪管船的鋪管作業進行模擬,分別得到以80°,88°進行鋪管時的橫蕩、縱蕩、首搖時歷曲線,并與不鋪管時進行對比,分別給出前180 s結果對比如圖13、圖14和圖15所示,并對運動的最值、平均值、標準差進行統計(見表3)。由圖可知,在不同的鋪管情況下,橫蕩、縱蕩、首搖時歷曲線略有不同,但整體趨勢相同。由表3可知,在不同的鋪管情況下,運動的最大值、最小值、平均值、標準差都相近,基本處于同一數量級。由鋪管作業對動力定位的靜態定位能力可知,在鋪管作業下也能滿足定位要求,故在時域模擬中,能夠達到對船位、首向的控制要求,因此時歷曲線差別不大。
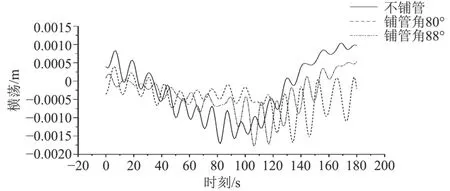
圖 13 鋪管作業對橫蕩時歷曲線的影響Fig. 13 Influence of pipe-laying on sway time series
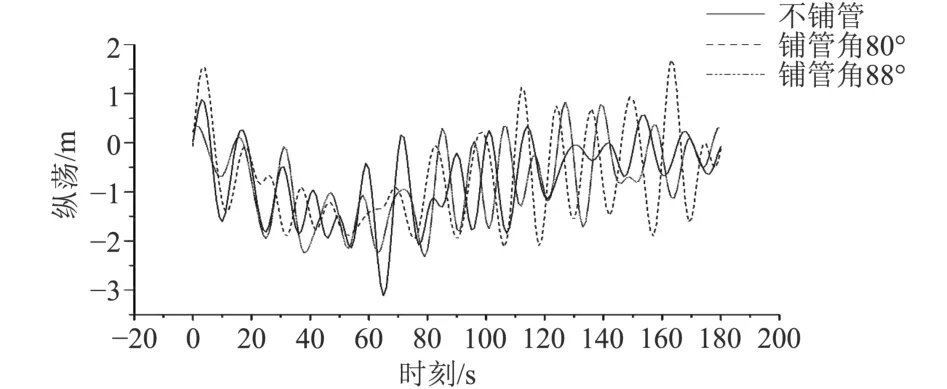
圖 14 鋪管作業對縱蕩時歷曲線的影響Fig. 14 Influence of pipe-laying on surge time series
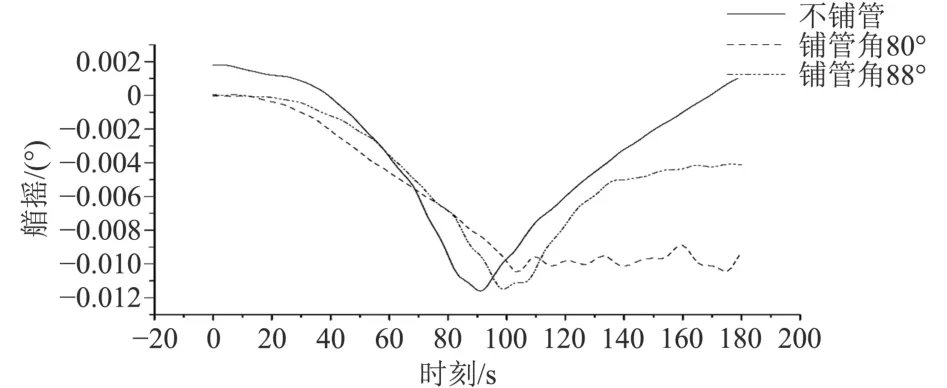
圖 15 鋪管作業對首搖時歷曲線的影響Fig. 15 Influence of pipe-laying on yaw time series
5 結 語
本文對J型鋪管船的靜態定位能力進行研究,獲得了風速包絡線以及推力使用率包絡線,確定了在不同載荷方向下能夠抵抗的極限載荷,以及在給定環境條件下不同環境載荷方向上的推力使用率。在時域中對J型鋪管船的實際運動進行了模擬,橫蕩、縱蕩運動范圍都在3 m以內,定位精度可達3‰水深,首搖可控制在3°以內。對進行鋪管作業時對動力定位性能的影響進行了研究,研究了不同鋪管角度下對推力使用率包絡線的影響,并在時域中對進行鋪管作業的船舶的動力定位精度進行了研究。在迎浪中作業時動力定位性能顯著變差,在隨浪中鋪管作業時動力定位性能顯著變好,且變化程度受鋪管角度影響。進行鋪管作業時能夠滿足動力定位要求,鋪管作業在時域模擬中對橫蕩、縱蕩、首搖運動值影響不大,仍能保持動力定位精度。
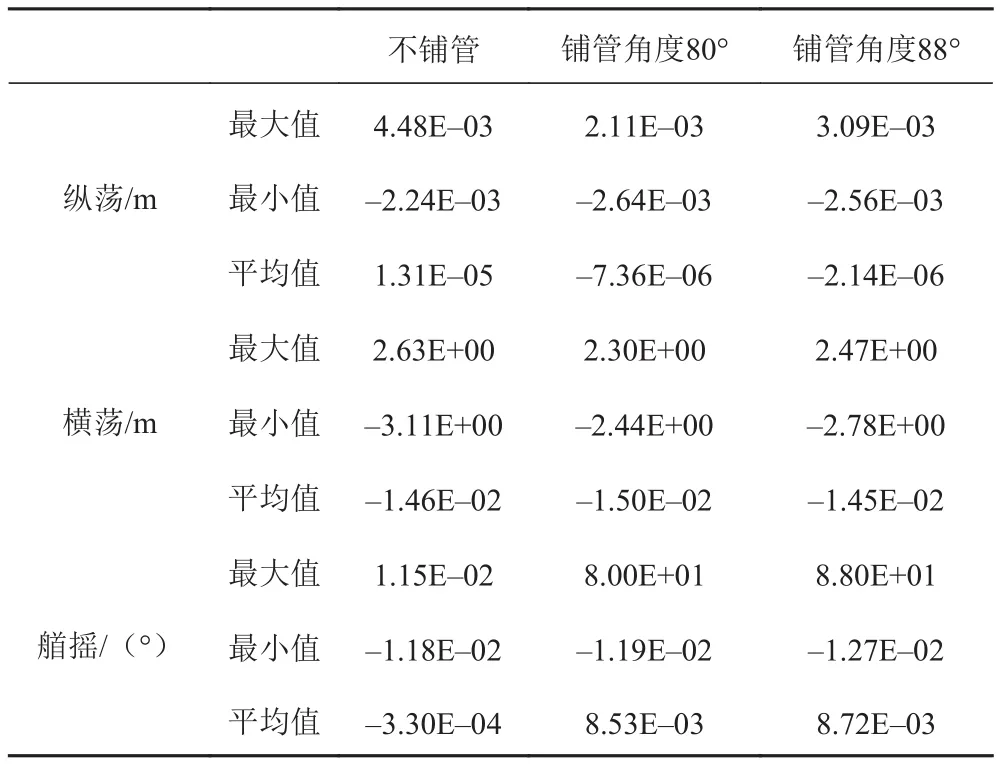
表 3 鋪管作業對運動時歷曲線的影響Tab. 3 Influence of pipe-laying on ship motion time series
[1]BRINK A, JIN C. Automatic position control of a30, 000 tons ship during ocean mining operations[C]//Offshore Technology Conference. Offshore Technology Conference, 1981.
[2]TANNURI E A, PESCE C P, ALVES G S, et al. Dynamic positioning of a pipeline launching barge[C]//The Twelfth International Offshore and Polar Engineering Conference.International Society of Offshore and Polar Engineers, 2002.
[3]BRUN C, COACHE D, GIORGIUTTI Y, et al. Influences on dynamic positioning system capability[C]//The Twenty-fifth International Offshore and Polar Engineering Conference.International Society of Offshore and Polar Engineers, 2015.
[4]王川, 李輝, 任慧龍, 等. 深水鋪管船的動力定位能力評估系統[J]. 華中科技大學學報(自然科學版), 2015(2): 61–65.
[5]謝文博, 付明玉, 陳翠和, 等. 鋪管船定位作業時的建模與分析[J]. 中國造船, 2011, 52(3): 101–108.
[6]SHI X, XIE W, FU M, et al. Terminal sliding mode tracking control for dynamic positioning J-lay vessel[J]. 2011: 293–298.
[7]VAN E P G D, COZIJN J L, LOUSSOUARN G, et al. A generic optimization algorithm for the allocation of DP actuators[J]. 2011.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30