起升機構電動機定子異常失電保護功能的實現
2018-03-14 06:01:06李向東
中國特種設備安全 2018年2期
陳 序 李向東
(江蘇省特種設備安全監督檢驗研究院 南京 210036)
1 功能的提出
GB/T 3811—2008《起重機設計規范》和GB/T 6067.1—2010《起重機械安全規程 第1部分:總則》,對電動機定子異常失電保護提出了相同要求:“起升機構電動機應設置定子異常失電保護功能,當調速裝置或正反向接觸器故障導致電動機失控時制動器應立即上閘”[1-2]。新修訂的《起重機械安裝改造重大修理監督檢驗規則》、《起重機械定期檢驗規則》也提出了類似要求[3-4]。與TSG Q0002—2008《起重機械安全技術監察規程—橋式起重機》(以下簡稱“橋規”)的要求相比,已經有了較大升級[5]。
1)擴大了條款的適用范圍。
原“橋規”條款只限定為吊運熔融金屬的橋式起重機起升機構,現在擴大到所有起重機械的起升機構(《起重機械定期檢驗規則》要求略有不同)。
2)擴大了條款的保護范圍。
原“橋規”條款只針對采用正反向接觸器的電路提出了“正反向接觸器故障保護要求”,對采用變頻器、定子調壓裝置等調速裝置的起重機卻沒有要求,導致很多采用調速裝置的起重機不受條款約束。而現在則不論采用何種調速方式,都應該具有保護功能。
電動機定子異常失電保護功能,實質是規定了用于位能性負載的起升機構電動機和制動器之間的動作關系。即電動機失電,在重力的作用下負載會自由墜落,導致事故。因此要求在危險情況時,制動器能及時自動抱閘,保障安全。必須指出,目前標準規定的該保護功能僅限于調速裝置或正反向接觸器故障原因導致的電動機失控時,制動器應立即抱閘。并不包括其他原因導致的電動機定子異常失電,在運用條款時不應隨便擴大要求范圍。
2 常見的功能實現方式
2.1 采用正反向接觸器的控制電路
●2.1.1 原有控制電路的缺陷
繞線式異步電動機可以通過轉子滑環串接電阻,既可用于減壓起動,又可用于調速,在起重機起升機構中得到廣泛應用。《起重機設計規范》規定,“采用控制屏控制的繞線式異步電動機起升機構,在下降過程中應有電氣制動。”目前采用最多的是反接制動,俗稱“倒拉反轉”制動,如圖1(a)所示,下降1-3檔時實際接通的是上升接觸器ZC。在重載時由于負載力矩大于電動機電磁轉矩,吊重下降運行,此時電動機的電磁轉矩是阻礙重物下降的。下降4-6檔時接通的是下降接觸器FC,用于輕載或強力下降。而在3檔和4檔的切換過渡階段,即在上升和下降兩個正反向接觸器間轉換時,為防止相間短路,在某一瞬間上升/下降接觸器都不通電。此時制動器ZDC會失電自動抱閘,導致沖擊,即發生“搶閘”現象。為防止“搶閘”,在制動器ZDC線圈回路中,給上升接觸器ZC和下降接觸器FC的觸點上并聯了制動器的一個常開觸點形成“自鎖”。但也埋下了事故隱患,如果換擋過程中正反向接觸器因故障不能正常工作,此時電動機就處于失電狀態,而制動器又因“自鎖”不能自動抱閘,造成重物自由墜落[6]。
●2.1.2 改進的控制電路
針對上述問題,目前比較常見的保護功能實現方案是刪除制動器的“自鎖”,同時增加時間繼電器,用延時斷開制動器的方式避免換擋“搶閘”。如圖1(b)所示,刪除了原電路中用于自鎖的觸點,同時上升接觸器ZC和下降接觸器FC的常開觸點ZC和FC不直接控制制動器線圈ZDC,而是控制斷電延時繼電器KT01,用KT01的延時斷開觸點控制制動器線圈ZDC。這樣在換向過渡階段,短時間內,用于上升和下降的正反向接觸器觸點斷開時,利用時間繼電器延時斷開的特性,維持制動器打開,避免搶閘;如果正反向接觸器發生故障,導致時間繼電器回路中的正反向接觸器觸點無法閉合,那么時間繼電器在到達設定時間后,會斷開制動器回路中的觸點KT01,使制動器斷電抱閘,從而實現定子異常失電故障保護。
另一種電路也是刪除了制動器自鎖,如圖2所示,增加了一個通電延時時間繼電器K01和中間繼電器K7。當起重機由下降2檔轉為3檔時,在某一瞬間,上升接觸器ZC和下降接觸器FC均處于未通電狀態,此時,由于K7的一個常開觸點承擔了原制動器接觸器自鎖的功能,所以短時間內制動器仍處于開啟狀態。同時,K01線圈得電,如果出現正反向接觸器故障,超過了K01設定的延時時間,則K01對應的觸點延時斷開,導致K7線圈斷電,K7對應的觸點動作,制動器ZDC1和ZDC2接觸器線圈先后失電,制動器上閘。
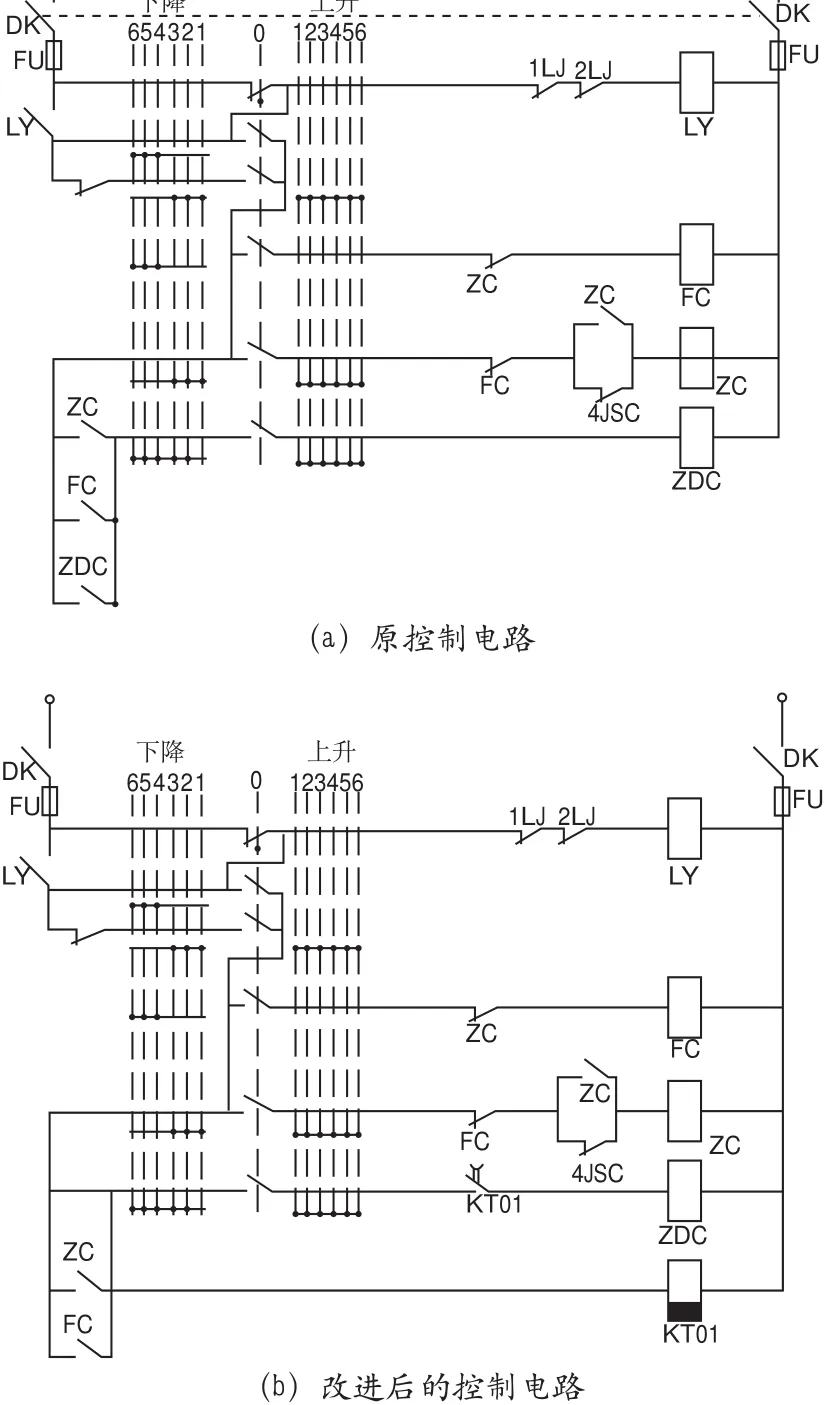
圖1 正反向接觸器控制電路

圖2 轉子串電阻調速定子異常失電改進電路
還有的實現方案則是回避“反接制動”這種電氣制動方式,通過采用自激動力調速等其他電路以避免換擋搶閘情況的發生。
應該指出的是,無論是通過延時電路還是采用自激動力調速等其他電路,大多都是針對鐵嶺“4.18”事故的直接原因,刪除制動器自鎖這個“電氣系統設計缺陷”。但是這種就問題改問題的方案實際保護能力有限,離定子異常失電保護功能要求還有差距,急需改進。例如:如果在時間繼電器線圈回路中正反向接觸器常開觸點發生故障(比如粘連),而此時正反向接觸器也沒有正常工作,那么制動器依然會保持打開狀態,發生重物墜落事故。而采用自激動力調速等其他電路的,本身電路復雜,故障點較多,也沒有增加其他新的技術手段來保障電動機定子異常失電時制動器能自動抱閘。
2.2 采用調速裝置的控制電路
●2.2.1 凸輪控制器控制
對于Nt>Nr的系統中,CR包括以下兩部分:①計算一個需要3次實數乘法,有2Nr個;②由于R1是上三角矩陣,所以在①中包含了(2Nt- l )個無效操作。因此總共需要(4Nr+l )次實數乘法,可以得到改進檢測算法的計算復雜度CMy-SD的上界:
凸輪控制器是一種手動控制器,在起重機中可以直接控制中小功率繞線異步電動機的起動、停止、換向和調速。如圖3所示,凸輪控制器可直接實現電動機換向,電路中沒有正反向接觸器,由于制動器直接和電動機并聯,電動機通電時,制動器通電開閘;電動機失電時,制動器也斷電抱閘。盡管電路簡單,倒是很符合電動機定子異常失電保護的要求。
●2.2.2 定子調壓調速裝置
早期定子調壓調速裝置一般沒有輸出端電流反饋檢測,不能檢測和電動機定子電流相關的故障。同時晶閘管單元只有三組模塊,電動機換向需通過正反向接觸器實現,因此電動機定子異常失電保護功能的實現除了調速裝置之外,還要考慮正反向接觸器的失效問題[7]。
新一代的調壓調速裝置的晶閘管單元,將原有的三組模塊變為五組反并聯的晶閘管模塊,可以直接實現電動機換向,無須正反向接觸器。同時配以電流反饋環(電流互感器),實時檢測電動機定子電流,加之裝置自身完善的故障保護輸出功能,基本可以實現標準中的要求。
但此類電路中制動器控制信號由定子調壓調速裝置本身輸出,在某些特定的情況時(如裝置本身的電路或程序故障,或裝置嚴重燒毀),可能會導致制動器不能正常工作,留有隱患。
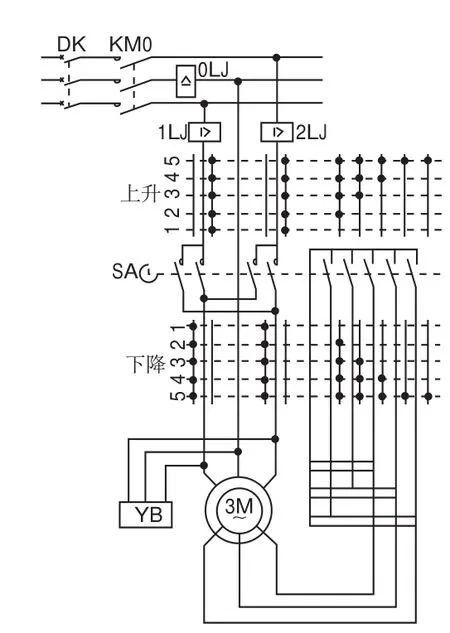
圖3 凸輪控制器電路
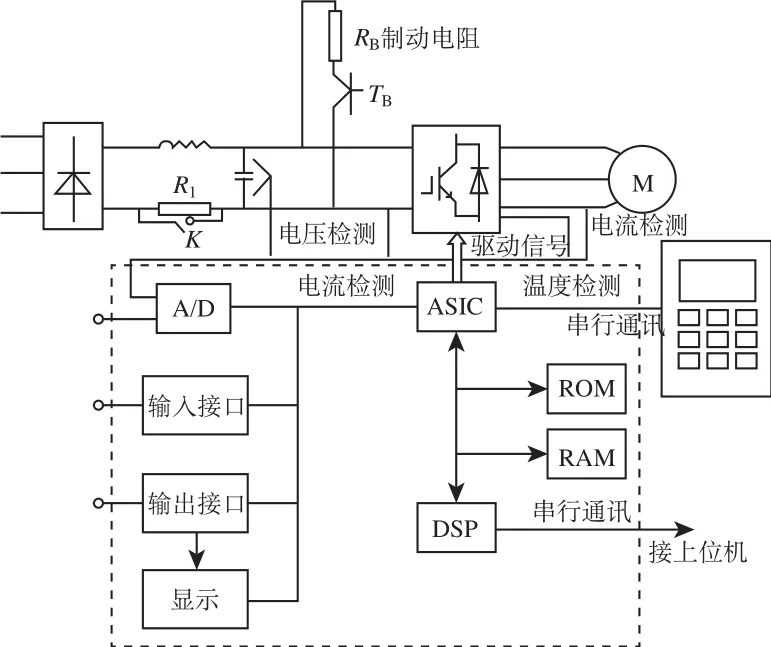
圖4 變頻器保護單元示意圖
采用變頻器調速的起升機構定子異常失電保護功能,主要是依靠變頻器自身集成的故障檢測功能來實現。如圖4所示,變頻器通過采樣電路取得的電壓、電流、溫度、轉速等信號經處理后輸入至故障保護電路。故障保護有欠壓、缺相、過壓、過流、過載、短路以及溫度過高等保護。但通用變頻器的功能設定不一定適用起重機起升機構,應選用具有相應功能的起重機專用變頻器。此外變頻器的起升控制電路由PLC或繼電器—接觸器電路進行,即變頻器不直接控制制動器,避免了因裝置本身的失效導致制動器不能正常動作。
3 改進的建議
3.1 制動器控制電路
制動器是實現定子異常失電保護功能的重要執行部件,其能否正常工作是整個保護功能實現的關鍵。如圖5(a)所示,目前制動器動作電路大多僅由一個接觸器控制(包括吊運熔融金屬起重機的雙制動器控制回路),但是如果這個接觸器本身發生故障(如粘連),那么即使前面的邏輯功能再強,制動器也無法斷電抱閘。針對這種問題,一種簡單的方案是增加一個接觸器,兩個接觸器線圈并聯,常開觸點串聯見圖5(b),實現同時工作并互為冗余備份。畢竟兩個接觸器同時故障的概率要小很多。當然,對于那些重要的特殊場合,有兩套能獨立工作的制動器就更好了。
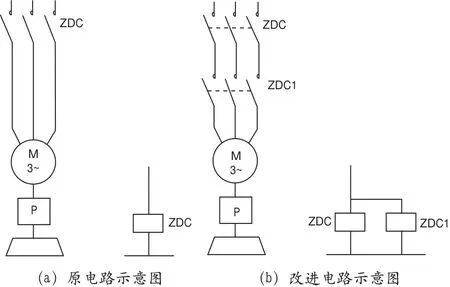
圖5 制動器控制線路
3.2 增加獨立的檢測裝置
目前起重機起升機構的定子異常失電保護功能仍有不足。對于采用傳統正反向接觸器電路的控制電路,可以適當增加獨立的檢測保護手段(如裝設電動機綜合保護器等),降低危險發生概率。不建議通過增加相應電器元件來實現復雜的邏輯關系,以避免增加新的故障點。
4 結束語
通過上述分析可見,大部分調速裝置因其相對完善的故障保護檢測措施,基本能夠滿足標準的要求。采用正反向接觸器的控制電路,因其保護能力有限,還需要進一步改進完善功能。另一方面,起重機使用單位不能因為有了相關保護功能而忽略了維護保養,這對于防止事故發生也是非常重要的。
[1] GB/T 3811—2008 起重機設計規范[S].
[2] GB/T 6067.1—2010 起重機械安全規程 第1部分:總則[S].
[3] TSG Q7016—2016 起重機械安裝改造重大修理監督檢驗規則[S].
[4] TSG Q7015—2016 起重機械定期檢驗規則[S].
[5] TSG Q0002—2008 起重機械安全技術監察規程—橋式起重機[S].
[6] 梁有明.起重機電動機定子異常失電保護檢驗[J].中國設備工程,2 016(12):47-48.
[7] 陳序,李向東. 起升機構電動機定子異常失電的原因分析[J].中國特種設備安全,2017,33(03):75-78.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
