基于無跡卡爾曼航空鋰電池的SOC估算系統
2018-03-14 03:44:07王順利
制造業自動化 2018年2期
王順利,謝 非,陳 蕾,張 麗,王 露
(1.西南科技大學 信息工程學院/檢測研究所,綿陽 621010;2.西南科技大學 信息工程學院,綿陽 621010)
0 引言
當航空鋰電池處于放電情況下,電池的SOC是電池的一個重要參數,能夠清楚的表示電池的當前剩余電量,可以為電池管理系統提供控制策略依據。那么能否準確的估計電池的SOC就顯得至關重要。
國外在SOC估算方面的研究相對較成熟,美國的GregoyL.Plett考慮到電池參數存在的非線性特性,采用擴展卡爾曼濾波算法,用于SOC估算。他還提出了“sigma”點卡爾曼濾波算法,能夠更加準確地預測鋰電池組的SOC值。德國研究人員認為電池管理系統的功能應該包括均衡充電、估算電池荷電狀態以及健康狀況,并根據SOC和SOH以及電池溫度來控制電池的放電電流等。
在國內,也有大量高校、企業和科研院所對SOC估算方法進行了相關的設計研究。
鄧濤等人結合傳統的安時積分法和開路電壓法,充分考慮了電池充放電效率和電池使用溫度等因素,提出了一種帶有補償措施的基于安時積分法的SOC估算方法,使得SOC估算值的偏差在3%以內,該估算方法精確度較高,為電池SOC的在線實時估算和檢測提供了重要參考。
本文研究主從無跡卡爾曼濾波(UKF)對航空鋰電池的SOC進行估算,在simulink上建立航空鋰電池的等效電路模型,進行仿真實驗。仿真實驗表明該算法SOC估算精度誤差穩定在百分之五左右。
1 理論與方法研究
1.1 卡爾曼濾波技術研究
卡爾曼濾波是一種遞推線性最小方差估計的運算方法,該法利用系統觀測量從中提獲取所需要估算的系統狀態向量。該方法引入系統狀態向量和系統觀測向量理論,可以建立狀態方程和觀測方程,是一種最優化自回歸數據處理算法。卡爾曼濾波法用反饋控制的方法估計過程狀態。因此卡爾曼濾波法可以分為兩個部分:狀態方程和測量更新方程。

在式(1)中,k為離散時間,X(k+1)和X(k)分別為系統在k+1和k時刻的狀態,W(k)為輸入白噪聲。

在式(2)中,k為離散時間,Y(k)為對應時刻的觀測狀態,X(k)為系統k時刻的狀態,V(k)為觀測噪聲。
由于航空鋰電池具有很強的非線性,普通的線性卡爾曼濾波算法并不能很好的保證精度。無跡卡爾曼濾波算法對非線性的系統具有良好的濾波效果。因此我們選擇了無跡卡爾曼濾波算法進行處理。
1.2 對Thevenin模型進行研究
根據對Thevenin模型的分析得到下面的式子:
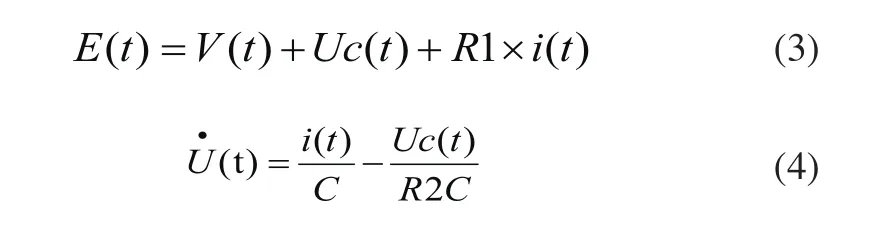
同時又因為E(t)為電源電動勢,它與SOC存在著非線性函數的關系式為E(t)=f(SOC(t)),再結合安時積分法

選擇SOC為系統狀態量,端電壓V(t)作為觀測量,i(t)作為系統輸入量,但由于我們這是個離散的系統,所以經過離散化處理后我們得到以下關系:

式(6)是系統狀態方程,S(k+1)和S(k)分別代表k+1以及k時刻系統的SOC值,Q是鋰電池的容量,ΔT是單位時間內(采樣時間),i(k)系統電流大小,V(k)為噪聲。

式(7)是系統測量方程,V(k)為k時刻電源電動勢的值,f(SOC(k))為電壓與SOC之間的非線性關系,R1為歐姆內阻,i(k)為k時刻測得的電流值,Uc(k)為k時刻開路電壓值,V(k)為噪聲。
1.3 無跡卡爾曼算法研究
對于一個非線性系統來說,它的狀態方程和測量方程分別為:

k為當前所處時刻,f(XK-1,UK)為非線性系統狀態轉移方程,g(Xk-1)為非線性測量方程,Xk為狀態變量,Uk為已知的輸入,Yk為測量信號;Wk叫過程噪聲,Vk測量噪聲。我們假定Wk和Vk是不相關的均值均為零高斯白噪音,其協方差分別為Qw,Rv。具體過程如下:
1)初始值計算:
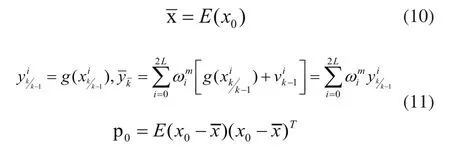
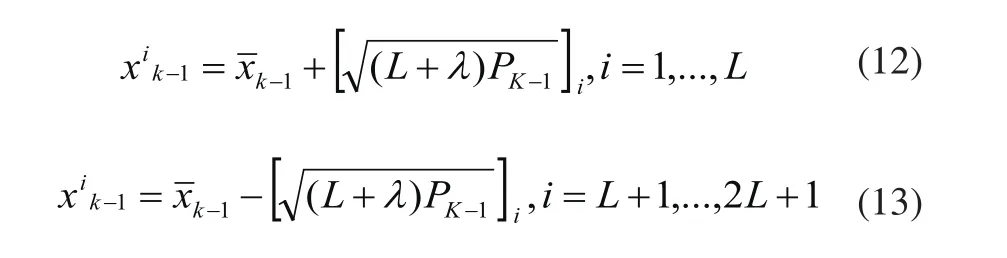
2)建立Sigma點:
3)狀態更新方程如下:
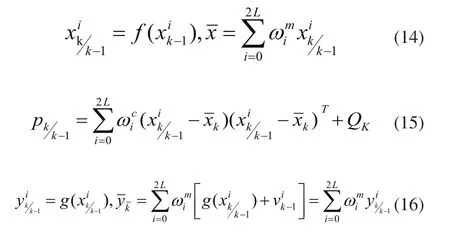
式子中的k/k-1為基于k-1時刻對k時刻的估計值。
4)測量更新方程如下:
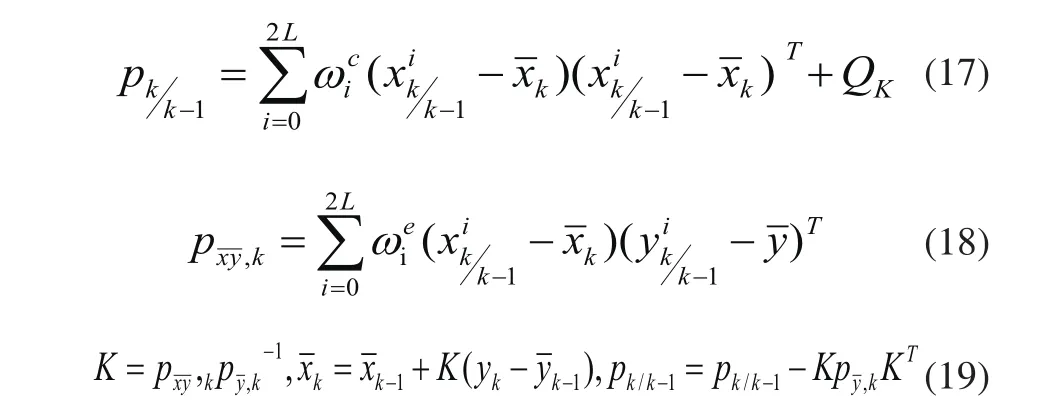
5)重復上面四個步驟。
由上述公式可知,只要給定初始條件X0和P0,根據k-1時刻的狀態值、k時刻獲得的輸入值和觀測值,就可以估算k時刻的狀態最優估計值Xk。
2 系統設計與實驗分析
2.1 電源等效電路模型的選擇
鋰電池等效電路模型的選擇對航空鋰電池的SOC估算系統來說十分重要。工程上比較常用而且易于實現的電池等效電路模型有Rint模型,RC模型,Thevenin模型和PNGV模型。Rint模型是一種理想狀態的簡單模型,U1來表示電池的開路電壓,R1來表示電池的內阻,但在實際中電池的電壓值、電流值都是隨時變動的,不是靜止不變的,故該模型誤差較大,不適合做高精度模型應用。
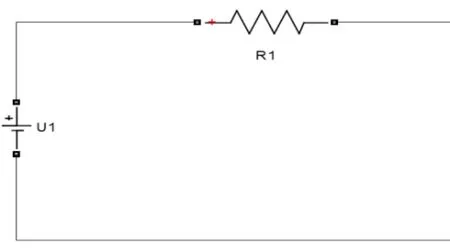
圖1 Rint模型
RC模型認為電池可由電容Cc和Cb,電阻R1、R2、Rc等效組成。Cc為一個取值非常的電容描述電池儲存的電量,Rc和Cc串聯作為儲能單元的計劃電阻;Cb表示電池極化電容;R1、R2表示電池內阻。

圖2 RC模型
Thevenin模型,該模型參數描述如下:Uc表示電池的開路電壓,R1表示電池歐姆電阻,R2表示電池極化電阻,C表示電池極化電容。

圖3 Thevenin模型
PNGV模型,該模型在Thevenin模型基礎上添加一個電容Cb,Cb表示負載電流的變化而產生的開路電壓變化也可用1/OVC表示,Ub表示電容Cb兩端的電壓。可知PNGV模型參數數學關系式:

在此,對選擇電池等效電路模型需要考慮兼顧以下三點要求:
1)模型最終是為了精確估算電池SOC值,因此需要盡可能準確的用各參數反映電池內部電壓、電流、內阻等特點;
2)電池需要適應動態充放電環境中,需要電池模型能準確的計算出電池在動態、變電流充放電電流的情況下,精確計算電池剩余電量;
3)電池模型結構盡量精簡易行,在不影響估算電池SOC精度前提下盡量精簡模型階數。
我們綜合考慮了本實驗的精度要求及模型的復雜程度,最終選擇了Thevenin模型。Thevenin模型的關系式如下:

2.2 實驗分析

圖4 soc-voc關系圖
為了驗證基于Thevenin模型的UKF算法的有效性。根據對航空鋰電池的實驗數據計算得到了電源電動勢與SOC的關系。
圖5為卡爾曼濾波系統框圖,描述了卡爾曼濾波算法的過程。
圖6為航空鋰電池電池部分的模型圖。
由圖7分析可知,卡爾曼濾波(紅色)得到的soc值非常接近于真實的soc值。達到誤差在5%之內的目標。
3 結束語

圖5 卡爾曼濾波系統框圖

圖6 電池模型
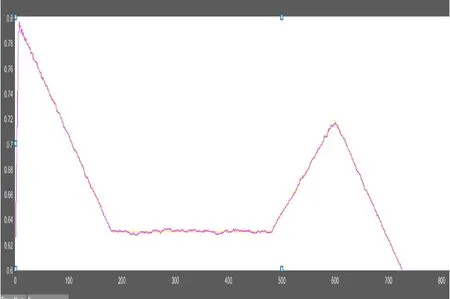
圖7 卡爾曼濾波波形圖
我們討論了關于航空鋰電池的等效電路模型及關于鋰電池的SOC的常用幾種估算方法,較為詳細的介紹了線性卡爾曼濾波及無跡卡爾曼濾波。動力電池等效模型對SOC估算具有重要意義。在建模方面,此處采用的Thevenin模型考慮了極化等因素對估算的影響,在算法上,在UKF中將比例修正法加入對稱采樣中 ,避免了局部效應問題;無跡卡爾曼在蓄電池的SOC估算系統中比擴展卡爾曼更容易實現,無跡卡爾曼并能實現更高的狀態估計精度。可以預見,基于適合的電池等效模型,無跡卡爾曼在其他各類蓄電池的估計方面也有著廣闊的應用空間,因此進一步實現基于的估算方法的工程化是很有必要的。
[1]黃小平,王巖.卡爾曼濾波原理及應用[M].電子工業出版社,2015.
[2]何志超,楊耕,盧蘭光.基于恒流外特性和SOC的電池直流內阻測試方法[J].清華大學學報,2015;55(5):532-537.
[3]Nejad S, Gladwin DT, Stone DAA systematic review of lumpedparameter equivalent circuit models for real-time estimation of lithium-ion battery states[J].Journal of Power Sources,2016,316:183-196.
[4]Barai A, Chouchelamane GH, Guo Y.A study on the impact of lithium-ion cell relaxation on electrochemical impedance spectroscopy[J].Journal of Power Sources,2015,280:74-80.
[5]Sun BX, Jiang JC, Zheng FD. Practical state of health estimation of power batteries based on Delphi method and grey relational grade analysis[J].Journal of Power Sources,2015,282:146-157.
[6]Yuan SF, Wu HJ, Ma XR. Stability analysis for li-ion battery model parameters and state of charge estimation by measurement uncertainty consideration[J].Energies,2015,8(8):7729-7751.
[7]Bazinski SJ, Wang X. Experimental study on the influence of temperature and state-of-charge on the thermophysical properties of an LFP pouch cell[J].Journal of Power Sources,2015,293:283-291.
[8]Marongiu A, Roscher M, Sauer DU. Influence of the vehicleto-grid strategy on the aging behavior of lithium battery electric vehicles[J].Applied Energy,2015,137:899-912.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
