艦載機著艦縱向非仿射模型控制器設計
2018-03-14 02:28:08吳文海胡云安
系統工程與電子技術 2018年3期
張 楊, 吳文海, 胡云安, 高 麗
(1. 海軍航空工程學院青島校區航空儀電控制系, 山東 青島 266041; 2. 海軍航空工程學院控制工程系, 山東 煙臺 264001)
0 引 言

而現在大多數處理非仿射模型方法都是將非仿射模型轉換為仿射模型。文獻[9-10]普遍采用泰勒公式和中值定理將非仿射模型轉換為仿射模型,然后再針對仿射型系統設計控制器。由于這種方法直接忽略了高階項,難免產生較大的誤差。并且之前大多數是對控制理論或傳統飛控進行研究,而在艦載機著艦領域的非仿射研究方案少之又少。
本文針對艦載機著艦模型提出了基于非仿射預設性能的控制律方法,該方法在傳統反演方法基礎上進行設計,但是無需對中間控制求導,也無需引入動態面等方法得到中間控制器的高階導數,簡化了設計過程;而且不需要自適應估計或者神經網絡等方法對未知函數近似,這無疑降低了控制器設計的復雜度;同時對模型的不確定性及外部的艦尾流擾動有較強的魯棒性。
1 艦載機著艦非仿射模型
艦載無人機非線性數學模型[11]為
g(cosφcosθsinαcosβ+sinφ
cosθsinβ-sinθcosαcosβ)+
(1)
(2)
(3)
Lcosμ+Ft(cosμsinα+sinμsinβcosα)-mgcosγ]
(4)
(5)
(6)

δ2+

該縱向著艦非仿射純反饋模型為
(7)
式中,gh(γ)、gγ(h,γ,θ)、gθ(q)、gα(α,γ,q)、gq(h,γ,δ)是未知非線性連續函數。
2 縱向控制器設計
定義1連續函數ρ(t):R+→R+稱為性能函數,并且同時滿足以下兩個條件:
(1)ρ(t)為正且嚴格遞減;
(2) limt→∞ρ(t)=ρ∞>0.
控制目標(2)可以通過如下不等式實現:
-Mρ(t)
(8)
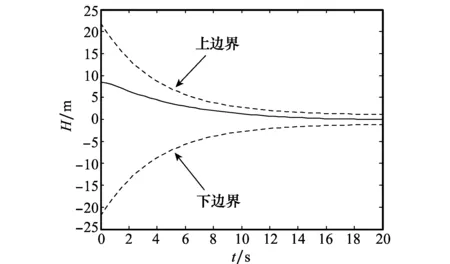
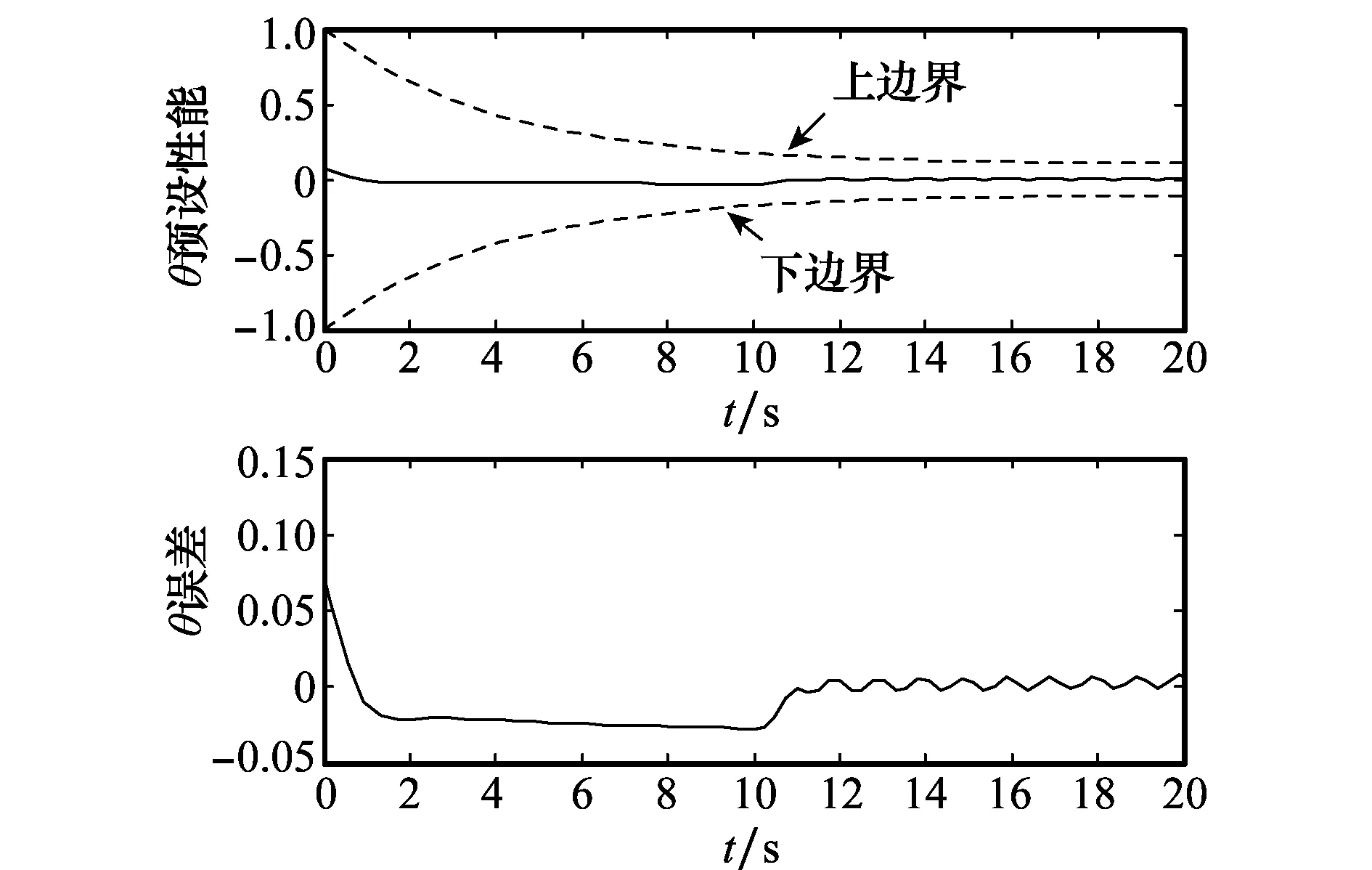
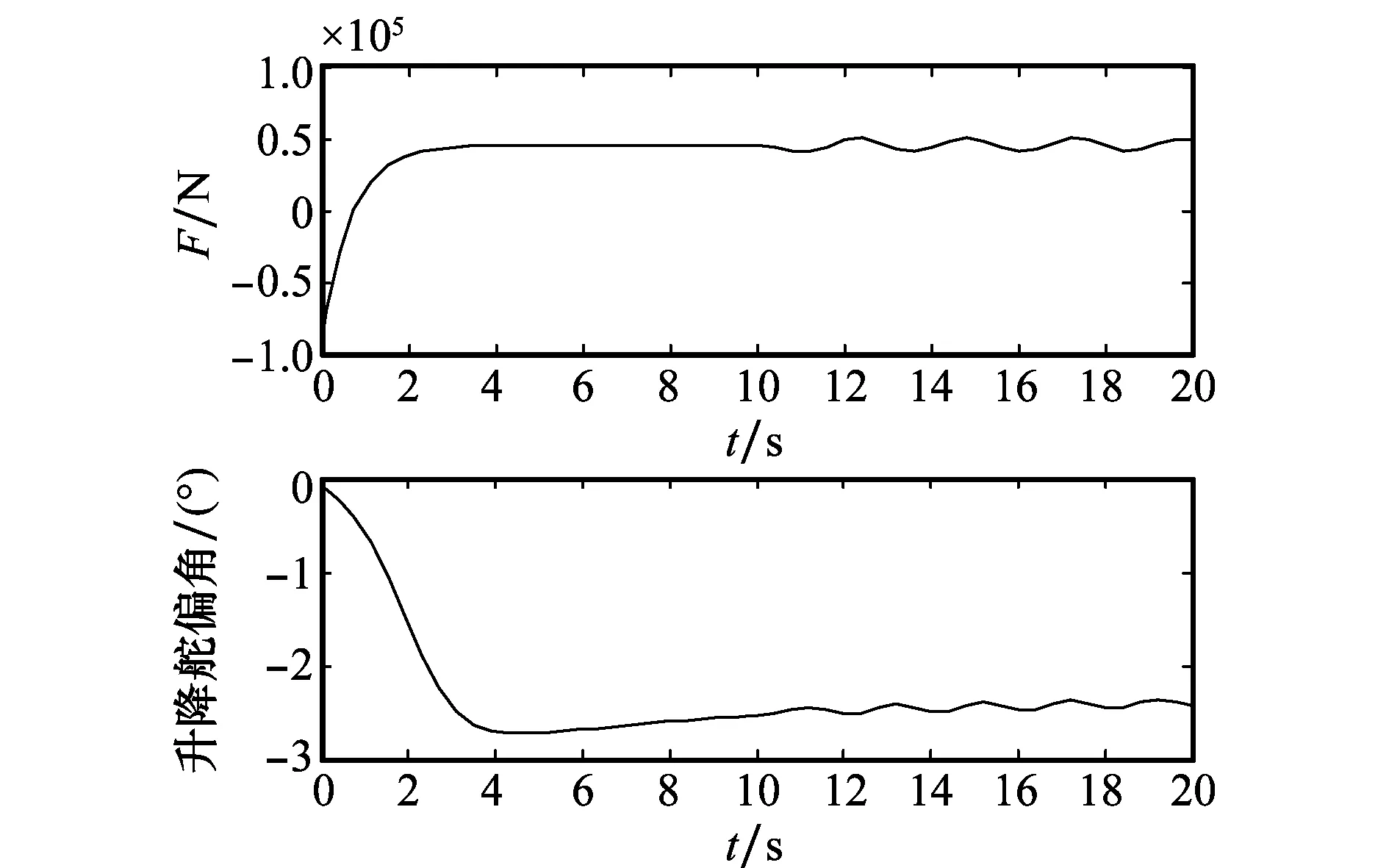
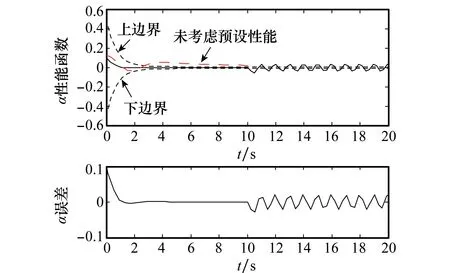
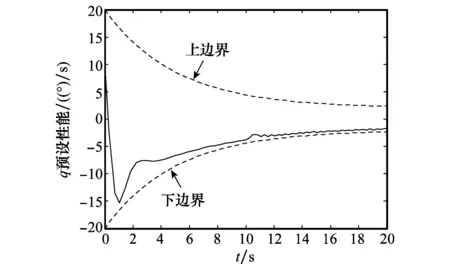
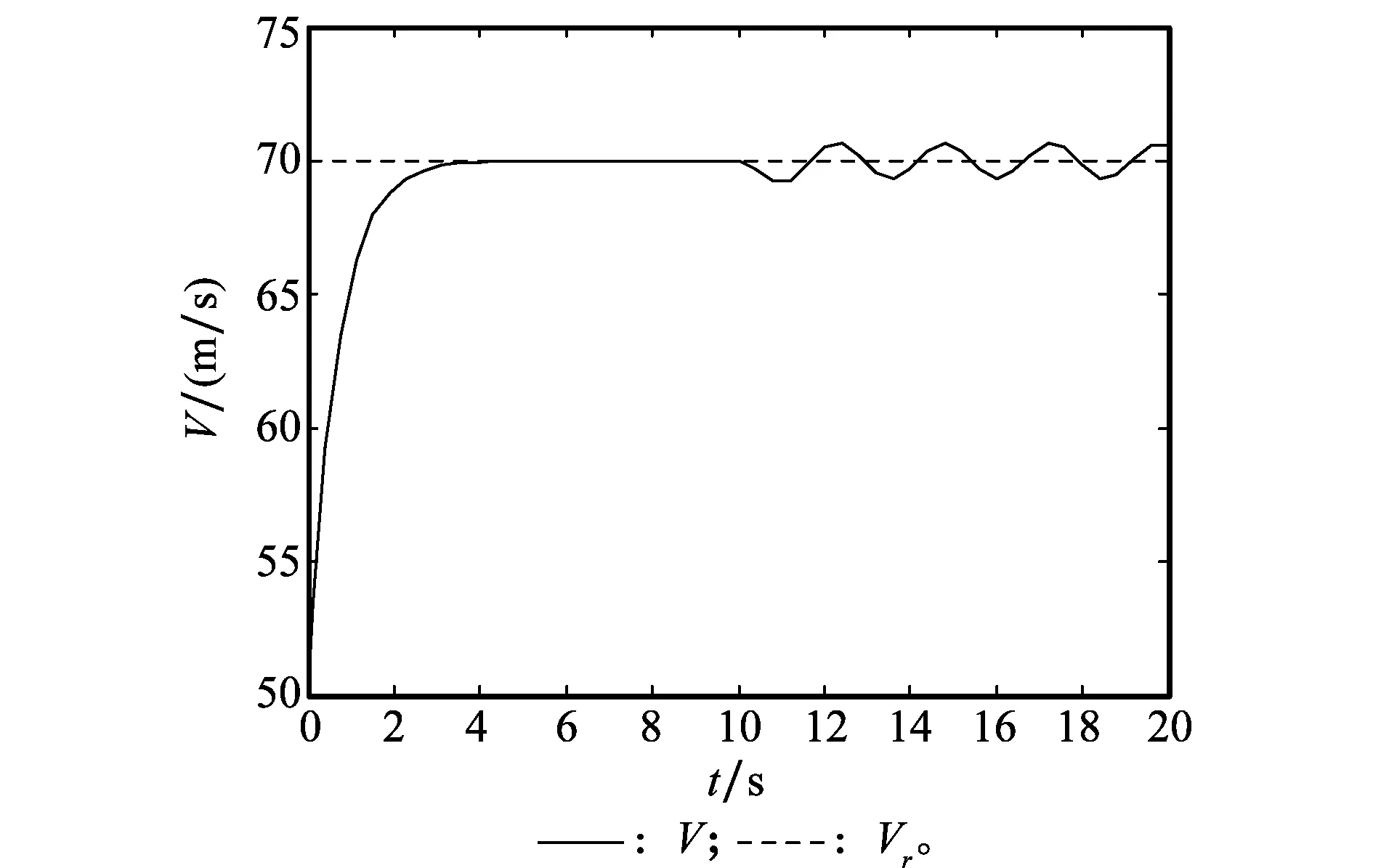
-ρ(t) (9) 其中,M∈[0,1]為設計參數。本文設計思路主要參考文獻[15],令M=1,進一步得到e(t)∈(-ρ(t),ρ(t)),?t≥0。性能函數取為ρ(t)=(ρ0-ρ∞)e-lt+ρ∞,ρ0>ρ∞>0,l>0。預設性能曲線圖如圖1所示。其中常數ρ∞表示預先設定的穩態誤差的上界,ρ(t)的衰減速度為跟蹤誤差e(t)收斂速度的下界,同時跟蹤誤差的最大超調不會大于ρ(0)。因此,通過選擇適當的性能函數ρ(t)便可對輸出誤差的穩態和瞬態性能進行限制。 圖1 預設性能曲線Fig.1 Prescribed performance curve 假設1目標高度函數連續有界且已知,一階導數連續有界但未知。 由于目標(高度、姿態角等)通過衛星或雷達引導可以實時測得,然而其導數并不是可直接獲得的數據,因此假設一階函數相關信息未知。 假設2存在未知正常數使得 由于構建的艦載機非仿射模型連續并可導有界,因此可知假設2成立。 本文控制器設計目標: (1) 設計控制器使所有信號有界,系統全局穩定; (2) 高度、俯仰角、迎角和俯仰角速率等跟蹤誤差滿足預先設定的性能。 設計控制器之前首先定義轉換函數,即 ρ1(0)>|x1(0)-hc(0)| ρ1(t)>(ρ10-ρ1∞)e-k1t+ρ1∞ 式中,ρ10>ρ1∞>0;k1>0。 定義轉換誤差及控制律設計。預設性能的一個重要步驟便是重新定義轉換誤差,即 因此,設計第1步的虛擬控制律 (10) ρ2(0)>|x2(0)-γc(0)| ρ2(t)>(ρ20-ρ2∞)e-k2t+ρ2∞ 式中,ρ20>ρ2∞>0;k2>0。 定義轉換誤差及控制律設計。類似步驟1,通過轉換誤差可得 設計第2步虛擬控制律 (11) ρ3(0)>|x3(0)-θc(0)| ρ3(t)>(ρ30-ρ3∞)e-k3t+ρ3∞ 式中,ρ30>ρ3∞>0;k3>0。 定義轉換誤差及控制律設計。通過轉換誤差函數,可得 設計第3步虛擬控制律 (12) ρ4(0)>|x4(0)-qc(0)| ρ4(t)>(ρ40-ρ4∞)e-k4t+ρ4∞ 式中,ρ40>ρ4∞>0;k4>0。 定義轉換誤差及控制律設計。通過轉換誤差,可得 設計第4步虛擬控制律 (13) ρ5(0)>|x5(0)-qc(0)| ρ5(t)>(ρ50-ρ5∞)e-k5t+ρ5∞ 式中,ρ50>ρ5∞>0;k5>0。 定義轉換誤差及控制律設計。與之前步驟相似,可得 設計最后一步實際控制律 (14) 由上文設計的控制器形式可知,該控制器不需要已知系統非線性項的相關參數,或者是函數的上下界,也不需要對未知非線性進行估計。并且和傳統反演不同的是,不需要中間虛擬控制的高階導數,減少了控制器設計的復雜度。 定理1考慮閉環非仿射系統(7),在假設1、假設2的前提下,給定任意初始條件xi(0),i=1,2,3,4,5,設計的控制器(10)~(14),使得系統全局穩定,所有信號有界并且跟蹤誤差滿足預先設定的性能。 證明 則 (15) 由 (16) 可得 ζ1(t,χ1,χ2) (17) 同理,可得 ζ2(t,χ1,χ2,χ3) (18) ζ4(t,χ1,χ2,χ3,χ5) (19) ζ4(t,χ1,χ2,χ3,χ4,χ5) (20) (21) 由以上可得集合為 (22) 并定義開集為 Ωχ=(-1,1)×(-1,1)×(-1,1)×(-1,1)×(-1,1) 由定理1可知,式(22)存在唯一最大值使得Χ:[0,τmax)→Ωχ。因此對于所有的t∈[0,τmax),閉環系統所有信號有界,并且對于所有的t∈[0,τmax),Χ嚴格在開集Ωχ范圍內。即 χ1(t)∈(-1,1),χ2(t)∈(-1,1),χ3(t)∈(-1,1), χ4(t)∈(-1,1),χ5(t)∈(-1,1) 將式(17)~式(21)代入式(15)得到 [gγ(χ1(t)ρ1(t)+hc,χ2(t)ρ2(t)+γc, [gα(χ4(t)ρ4(t)+αc,χ2(t)ρ2(t)+γc, (23) 由假設2并結合平均值定理可得 gh(χ2(t)ρ2(t)+γc)= (24) 同式(24)類似可得 gγ(χ1(t)ρ1(t)+hc,χ2(t)ρ2(t)+γc, χ3(t)ρ3(t)+θc)=gγ(χ1(t)ρ1(t)+hc, χ2(t)ρ2(t)+γc,χ3(t)ρ3(t))+ (25) (26) gα(χ4(t)ρ4(t)+αc,χ2(t)ρ2(t)+γc, χ5(t)ρ5(t)+qc)=gα(χ4(t)ρ4(t)+αc, χ2(t)ρ2(t)+γc, (27) gq(χ1(t)ρ1(t)+hc,χ2(t)ρ2(t)+γc,δ))= gq(χ1(t)ρ1(t)+hc,χ2(t)ρ2(t)+γc,0)+ (28) 將式(24)~式(28)代入式(23),進一步可得 χ2(t)ρ2(t)+γc,χ3(t)ρ3(t))-a2ε2(t)· χ2(t)ρ2(t)+γc,χ5(t)ρ5(t))- (29) 假設2進一步可以表示為 由式(29)進一步可得 χ2(t)ρ2(t)+γc,χ3(t)ρ3(t))- χ2(t)ρ2(t)+γc,χ5(t)ρ5(t))- (30) 另外,由 (gγ(χ1(t)ρ1(t)+hc,χ2(t)ρ2(t)+γc, (gα(χ4(t)ρ4(t)+αc,χ2(t)ρ2(t)+γc, |gγ(χ1(t)ρ1(t)+hc,χ2(t)ρ2(t)+γc, |gα(χ4(t)ρ4(t)+αc,χ2(t)ρ2(t)+γc, |gq(χ1(t)ρ1(t)+hc,χ2(t)ρ2(t)+γc,0)- (31) 由式(31)可知,當 Ω=Ωε1(t)∪Ωε2(t)∪Ωε3(t)∪Ωε4(t)∪Ωε5(t) 其中 為進一步分析跟蹤誤差在預設性能,引入引理1。 引理1如果轉換誤差函數ε(t)有界并且存在常數εB>0使得|ε(t)|≤εB,那么誤差e(t)∈(-ρ(t),ρ(t))。 證明 結合引理1可得 定理1得證。 證畢 本文設計的方法不需要類似傳統反演方法對中間控制變量進行求導,避免了“指數膨脹”問題,減少了計算量;并且控制器設計過程不需要著艦的精確模型;同時對于模型的不確定性有較強的魯棒性,不需要自適應估計或者采用神經網絡和模糊控制等方法來對模型進行近似。 著艦時需要考慮艦尾流的影響,本文采用的是目前運用較多的軍標MIL-HDBK-1797中[16]描述的艦尾流模型,包括雄雞尾流、尾流隨機分量、周期分量和隨機自由大氣紊流分量。 參數設置及初始值為 V0=50 m/s Vr=70 m/s,H(0)-Hr(0)=8 m α(0)=0.1,γ(0)=0,θ(0)=0.2,q(0)=8 a1=1,a2=0.1,a3=0.3,a4=3,a5=10 預設性能函數為 ρ1(t)=(22-1)e-0.25t+1 ρ2(t)=(0.6-0.02)e-0.5t+0.02 ρ3(t)=(1-0.1)e-0.25t+0.1 ρ4(t)=(0.5-0.01)e-1.5t+0.01 ρ5(t)=(20-2)e-0.2t+2 艦載機高度誤差隨時間變化的曲線如圖2所示。 圖2 高度跟蹤誤差Fig.2 Error of height tracking 由圖2可知,誤差曲線在預先設定的范圍內,并且誤差收斂較快。 艦載機俯仰角誤差隨時間變化的曲線如圖3所示。 圖3 俯仰角誤差及預設性能Fig.3 Pitch error and prescribed performance 由圖3可知,采用預設性能方法后使誤差在0.1的范圍內進行變化,并在預先設定的范圍內,在實際飛行過程中這樣的俯仰角跟蹤精度較高。本文設計的方法提供了快速準確的俯仰角響應,盡管在10 s后加入了艦尾流擾動,但是跟蹤誤差仍然較小,具有較高的魯棒性能。 設計的舵偏角和推力控制曲線如圖4所示。 圖4 推力升降舵曲線Fig.4 Thrust and elevator curve 由圖4可知,盡管擾動加入使得控制器設計出現波動,但是即使在存在艦尾流擾動的情形下,升降舵偏角依然保持波動較小。 迎角誤差隨時間變化的曲線如圖5所示。 圖5 迎角誤差考慮預設性能和未考慮預設性能對比圖Fig.5 Comparison chart of considering prescribed performance and without prescribed performance 為了進一步分析本文方法的優越性,本文和未考慮預設性能的迎角跟蹤誤差曲線進行了對比,由圖5可知,考慮性能函數的誤差較大,沒有在預先設定的范圍內。 俯仰角速率誤差跟蹤曲線如圖6所示。 圖6 俯仰角速率跟蹤誤差曲線Fig.6 Pitching angular rate tracking error curve 俯仰角速率誤差在開始的2 s較大,但是跟蹤誤差收斂較快且在預先設定的要求范圍之內。從圖2、圖3、圖5、圖6可知,誤差曲線在預先設定的范圍內,滿足預先設計的要求。 速度控制曲線如圖7所示。 圖7 速度控制曲線Fig.7 Curve of velocity 由圖7可知,設計的控制器能快速地跟蹤期望的設定速度且跟蹤誤差較小。 綜合以上圖分析,盡管10 s加入了艦尾流擾動,但是控制器魯棒性能較好,采用預設性能方法的誤差都在預先設定的范圍內,并且滿足快速性和魯棒性。 針對艦載機著艦模型中更為一般的非仿射非線性模型進行了控制律的設計,提出了非仿射著艦縱向預設性能控制器方法。從理論推導看出該方法無需對中間控制變量求導,避免了“指數膨脹”問題,減少了計算量;簡化了設計過程,控制器更加簡單,不需要神經網絡或者模糊控制器對未知參數進行估計;考慮了艦尾流外部擾動,魯棒性較高。通過仿真證明了該方法的有效性和正確性。 [1] 朱齊丹, 孟雪, 張智. 基于非線性動態逆滑模的縱向著艦系統設計[J]. 系統工程與電子技術, 2014, 36(10): 2037-2042. ZHU Q D, MENG X, ZHANG Z. Design of longitudinal carrier landing system using nonlinear dynamic inversion and sliding mode control[J]. Systems Engineering and Electronics, 2014, 36(10):2037-2042. [2] 鄭峰嬰, 龔華軍, 甄子洋. 基于積分滑模控制的無人機自動著艦系統[J]. 系統工程與電子技術, 2015, 37(7): 1621-1628. ZHENG F Y, GONG H J, ZHEN Z Y. Carrier UAV autonomous landing system based on integral sliding mode control[J]. Systems Engineering and Electronics, 2015, 37(7):1621-1628. [3] 黃得剛,章衛國,邵山,等.艦載機自動著艦縱向控制系統設計[J]. 控制理論與應用, 2014(12): 1731-1739. HUANG D G, ZHANG W G, SHAO S, et al. Design of automatic control system for longitudinal landing on carrier[J]. Control Theory & Applications, 2014(12):1731-1739. [4] ZHANG Y, WU W, WANG J, et al. Prescribed performance adaptive constrained backstepping controller for carrier-based longitudinal landing with magnitude constraints[C]∥Proc.of the China Control Conference, 2017: 856-861. [5] ZHENG F Y, GONG H J, ZHEN Z Y. Adaptive constraint backstepping fault-tolerant control for small carrier-based unmanned aerial vehicle with uncertain parameters[J]. Proceedings of the Institution of Mechanical Engineers Part G: Journal of Aerospace Engineering, 2016, 230(3), 407-425. [6] LEE T, KIM Y. Nonlinear adaptive flight control using backstepping and neural networks controller[J]. Journal of Guidance Control & Dynamics, 2001, 24(4): 675-682. [7] BOSKOVIC J D, CHEN L, MEHRA R K. Multivariable adaptive controller design for a class of non-affine models arising in flight control[C]∥Proc.of the IEEE Conference on Decision and Control,2001:2442-2447. [8] 劉鑫燕. 高超聲速無人機的非仿射模糊滑模控制研究[D]. 南京:南京航空航天大學, 2014. LIU X Y. Research on fuzzy sliding mode control for hypersonic unmanned aerial vehicle[D]. Nanjing:Nanjing University of Aeronautics and Astronautics,2014. [9] CHEN L, WANG Q. Adaptive robust control for a class of uncertain MIMO non-affine nonlinear systems[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(1): 105-112. [10] BOSKOVIC J D, CHEN L, MEHRA R K. Adaptive control design for nonaffine models arising in flight control[J]. Journal of Guidance Control & Dynamics, 2004, 27(2): 209-217. [11] FITZGERALD. Flight control system design for autonomous UAV carrier landing[D]. England: Cranfield University, 2004. [12] ZHENG F Y, ZHEN Z Y, GONG H. Observer-based backstepping longitudinal control for carrier-based UAV with actuator faults[J]. Journal of Systems Engineering and Electronics, 2017, 28(2):322-337. [13] GAVILAN F, VAZQUEZ R, ACOSTA J. Adaptive control for aircraft longitudinal dynamics with thrust saturation[J]. Journal of Guidance Control & Dynamics, 2014, 38(4): 651-661. [14] 張楊, 胡云安. 受限指令預設性能自適應反演控制器設計[J]. 控制與決策, 2017,32(7):1253-1258. ZHANG Y, HU Y A. Prescribed performance adaptive backstepping controller design based on constrained command filtered[J]. Control and Decision, 2017, 32(7):1253-1258. [15] BECHLIOULIS C P, ROVITHAKIS G A. A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems[J]. Automatica, 2014, 50(4): 1217-1226. [16] MIL-F-8785 C Military specification:Flying qualities of piloted airplanes[S].Washington D.C.:Department of Defense, 1980.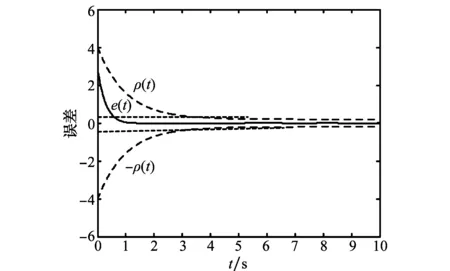

3 穩定性證明










4 仿真分析驗證
5 結 論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56