柴油機共軌壓力自適應神經模糊PID控制研究*
2018-03-15 03:30:30陳國金朱凌俊杭州電子科技大學機械工程學院浙江杭州310018
機電工程 2018年2期
關鍵詞:系統
徐 龍,陳國金,朱凌俊,陳 昌(杭州電子科技大學 機械工程學院,浙江 杭州 310018)
0 引 言
隨著國際社會對環境問題日益重視,對柴油機可靠性、動力性和排放性等性能提出了更高要求。電控技術為柴油機發展帶來新的革命,實現了柴油機噴油量、噴油定時、噴油壓力和噴油規律的靈活而精確的控制,柴油機整體性能得以改善。其中共軌壓力是電控噴油系統的關鍵,不僅決定噴油壓力的大小,而且是影響噴油量的主要參數之一,軌壓的穩定性和過渡響應直接決定柴油機起動、怠速、變速等工況下的動力性能[1],因此,對共軌壓力的精確控制是提高柴油機性能的關鍵。
目前,柴油機共軌壓力控制方法主要有常規PID控制、模糊PID控制和基于遺傳算法優化模糊PID控制等。早期使用最多的是常規PID控制,設計簡單,通過人工整定3個控制參數,在整個控制過程中不變,當控制系統具有較高非線性和嚴重耦合時,控制性能大大降低,對工作中未知干擾不能進行及時處理,軌壓的波動幅度較大[2]。因此,后期主要開始研究能實現軌壓自整定的PID控制方法。文獻[3-4]在常規PID控制基礎上結合模糊推理提出了模糊PID控制,利用模糊推理自然語言的表達能力,使輸入量能在不同范圍內進行在線整定PID控制參數,相比PID控制能實現不同工況下對不同軌壓變化的控制,具有一定的自適應性,但模糊規則仍由專家經驗和專業技術人員設定,主觀性較大,加上高壓共軌系統的復雜性,在瞬態工況下控制系統的應變能力較弱,軌壓過渡不平緩;文獻[5]基于遺傳算法對模糊PID控制參數進行優化處理,在壓力突變時通過優化控制參數能是壓力迅速穩定,超調更小,瞬態工況下的過渡性能得到改善,控制效果較好,但由于遺傳優化的操作過程是離散的,無法通過實時在線的硬件在環仿真實驗去驗證算法的實際準確性,加大了實驗的操作難度。
綜上所述,本研究將結合實際應用高壓共軌系統的非線性、時變性以及滯后性特點,在常規PID控制器基礎上,融合神經網絡的自學習能力和模糊推理自然語言表達能力的優點,設計出能實時在線調節軌壓控制參數的自適應神經模糊PID控制器,使共軌壓力的控制效果達到最佳。
1 柴油機高壓共軌系統共軌壓力控制
柴油機高壓共軌電控噴油系統結構組成如圖1所示。

圖1 柴油機高壓共軌電控噴油系統結構組成
系統主要由油箱、濾清器、低壓油泵、高壓油泵、共軌管、噴油器、電控單元(ECU)及傳感器等一系列輔助監測裝置組成。軌壓控制系統中被控對象為比例節流閥、高壓油泵、共軌管,燃油在低壓油泵工作下輸出,經過比例節流閥后進入高壓油泵的柱塞腔,比例節流閥的開度決定了流入柱塞腔內的燃油量。高壓油泵上油量壓力控制閥(PCV閥)根據ECU在不同工作狀態下計算的排量改變PCV閥開啟關閉的時刻和時間長短,最終達到調節共軌壓力的效果[6]。通過改變電流大小能實現對比例節流閥和PCV閥的控制,電流大小均由控制器的脈沖調寬信號決定,調節其占空比控制燃油流量達到對軌壓的控制。
2 ANFIS與PID控制器相結合的控制算法
在常規PID控制器的基礎上,利用在工程應用中監測到的大量輸入輸出數據樣本,結合基于T-S模型的自適應神經模糊推理系統來自適應學習調整隸屬度函數和模糊控制規則,設計自適應神經模糊PID控制器,根據目標軌壓和實測軌壓在線實時調節軌壓的控制參數,提高軌壓穩定性。
2.1 基于T-S型的模糊PID控制
柴油機高壓共軌系統工作狀況復雜多變,使得共軌壓力閉環控制系統具有高度的時變性和非線性,無明確的數學模型和規律可循,以至于常規PID控制無法滿足系統需求的效果。因此根據T-S型模糊推理器,結合PID調節器組成新的模糊PID控制器,可以通過監測到的軌壓波動狀況自適應調節PID控制參數。
模糊PID控制器原理如圖2所示。

圖2 模糊PID控制器結構框圖
在共軌壓力控制中,為了降低因機器故障影響的范圍,常規PID控制普遍采用增量式PID控制方法。
T-S型模糊控制器主要由3部分組成:(1)模糊化(D/F);(2)模糊規則庫(if-then規則);(3)推理決策機制(T-S型推理)。在圖2中,整個軌壓控制結構中以目標軌壓作為輸入,以實測軌壓值作為輸出。圖中模糊控制器使用2×3 T-S型模糊推理系統,輸入為目標軌壓和實測軌壓的偏差e和偏差變化率ec,經過模糊化處理后由T-S型模糊推理中的模糊規則計算得到3個調整量ΔKp、ΔKi和ΔKd,以此作為PID調節器的輸入量調節3個控制參數Kp、Ki和Kd[7]。
隸屬度函數(membership function,MF)用于描述每種輸入參與運算的程度。該函數為每種輸入關聯一個權重值,用于定義輸入值之間的功能重疊,最終確定一個輸出值。兩種輸入量軌壓偏差e和偏差變化率ec,對應語言變量的語言值均取為Z(零)、S(小)、M(中)、B(大)4個模糊子集,根據共軌壓力工程應用的實際情況,初步將e和ec量化后模糊論域均取為[0 6],隸屬度函數的值域為[0 1],選擇“鐘形”隸屬度函數,輸入量e和ec的MFs,如圖3所示。

圖3 輸入量e和ec的MFs
與Mamdani模糊控制器相比較,T-S型模糊控制器最大區別在于輸出量是用清晰的函數表示結果,無需進行清晰化處理就可以直接操作執行機構。使用T-S型模糊推理,其模糊規則Rj一般表示為:Rj:ifx1isAjandx2isBj,Thenfj=pjx1+qjx2+rj。其中,Aj(Bj)為x1(x2)的第j個語言變量值,j=1,2,3,4;pj,qj,rj為后件參數,是系統固有特性的反應。
在軌壓控制過程中,推理決策分兩個步驟完成:(1)通過控制器輸入與已有的規則選定當前規則;(2)根據選定規則進行控制決策。這樣根據實際工作中軌壓的波動狀況,實時改變軌壓控制參數,維持軌壓穩定。3個參數的整定過程可表示為:
Kp=Kp0+ΔKp
(1)
Ki=Ki0+ΔKi
(2)
Kd=Kd0+ΔKd
(3)
式中:Kp0,Ki0,Kd0—初始PID參數值;ΔKp,ΔKi,ΔKd—模糊控制器的對PID參數實時調整量。
2.2 自適應神經模糊PID控制器設計
T-S型模糊推理系統中,參數辨識分析的實測數據量龐大,可以采用用神經網絡進行處理,建立自適應神經網絡模糊推理系統(ANFIS)。ANFIS神經網絡常用簡化的ANFIS神經網絡結構,如圖4所示。

圖4 常用ANFIS神經網絡簡化結構
確定網絡結構后,只需更新前件參數和后件參數即可。通過前向學習固定前件參數,由最小二乘法計算后件參數;前件參數在固定結論參數不變由反向BP近似誤差調整前件參數,調整隸屬度函數的形狀,直到誤差達到滿足精度停止訓練[8]。
最后,ANFIS根據每個時刻目標軌壓和實測軌壓計算偏差e和偏差變化率ec,調節PID控制參數的調整量ΔKp、ΔKi和ΔKd。ANFIS的神經網絡結構共有5層組成:
第1層。每個節點表示一個語言變量,用如下函數實現自適應功能:
(4)
(5)

默認隸屬度函數為“gbellmf”(鐘形函數):
(6)
式中:aj,bj,cj—前件參數。
第2層。該層每個節點i代表一條模糊規則,總共有m=4×4=16條規則,每條規則的適應度計算如下:
(7)
第3層。固定節點,計算第j條規則的適應度占所有規則適應度的比重,稱為歸一化規則適應度:
(8)
第4層。該層主要計算第個規則的后件輸出:
(9)
式中:pj,qj,rj—后件參數。
第5層。計算系統的總輸出,由式(8~9)得到:
(10)

由于后件輸出為線性函數,在計算出最二乘法均方誤差最小min‖AX-W‖時,參數的最佳估計X*:
X*=(ATA)(-1)ATW
(11)
設誤差函數為:
(12)
式中:fdj,fj—期望和實際的輸出函數。
本研究網絡結構中權重參數使用反向傳導梯度下降學習算法調整,迭代計算出輸出層的誤差并將其反向傳導給前向節點,更新所有權重參數使系統輸出和訓練樣本數據匹配,得到需要的神經網絡[9],主要參數為輸出函數3個參數aj、bj、cj:
(13)
(14)
(15)
式中:η—學習速率,η>0。
輸入量e和ec的隸屬度函數量均取為4,利用Matlab的Anfis編輯器加載已有的訓練樣本來訓練前件參數aj,bj,cj和后件參數pj,qj,rj,迭代次數設為100,可以得到訓練結束后的誤差精度error=0.145 75。訓練后覆蓋輸入量e和ec模糊子集的分布圖如5所示。

圖5 訓練后覆蓋輸入量e和ec模糊子集的分布圖
經過訓練之后,圖5中軌壓偏差和偏差變化率隸屬度函數形狀也變化[10],這與開始時輸入的訓練數據有關。在輸出函數界面中,PID控制參數調整量的線性函數的參數也會隨著訓練完成發生變化,得到最終輸出量的函數表達關系。至此,整個自適應神經網絡模糊推理系統建立完成,保存為guiya.fis文件,仿真時導入模糊邏輯控制器模塊中。
3 仿真分析
根據建立好的軌壓自適應神經模糊推理系統(guiya.fis)結合PID控制器,在Matlab/Simulink中搭建共軌壓力的控制算法仿真模型,如圖6所示。以軌壓偏差的和偏差變化率作為模型輸入量,被控制對象的數學模型參考文獻[11]的模型:
(16)
初步仿真分析,比較兩種控制方法下系統的穩、動態性能以及抗干擾能力,仿真結果如圖(7,8)所示。
從圖7能觀察到軌壓在階躍變化時,常規PID控制響應曲線上升時間為0.7 s左右,峰值時間是1.2 s,超調量達到,調節時間為1.8 s;而自適應神經模糊PID控制的響應曲線超調量很小,上升時間約為0.2 s,在1 s后系統完全趨于穩態。
在3 s時給系統施加一個幅值為0.9的脈沖擾動后,從圖8能清楚的觀察到自適應神經模糊PID控制比常規PID控制的仿真曲線波動小,迅速恢復到平衡狀態,幾乎不受干擾。

圖6 自適應神經模糊PID和常規PID控制仿真框圖

圖7 階躍響應曲線

圖8 脈沖擾動下響應曲線
4 實驗驗證
為了驗證自適應神經模糊推理結合PID控制的柴油機共軌壓力控制算法在實際應用中的控制效果,本研究將Matlab/Simulink中的控制算法模型直接生成代碼,修改后移植到ECU中,在XBD-CR型高壓共軌電控噴油系統的實驗監測平臺上,對柴油機在起動和加速兩種過渡工況的短時間內(20 us)的軌壓進行監測,觀察軌壓的波動狀況,并與常規PID控制效果進行比較,如圖(9,10)所示。
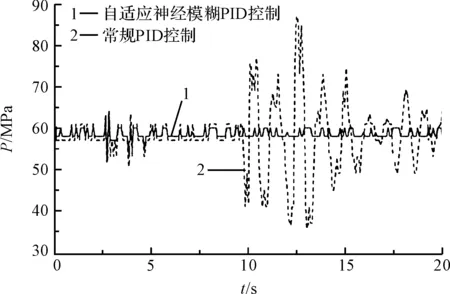
圖9 起動工況軌壓波動狀況

圖10 加速工況軌壓波動狀況
(1)起動工況。觀察圖9可知,在起動初期0~8 us時間段內,共軌壓力較為穩定,最大波動量約為5 MPa,常規PID控制和自適應神經模糊PID控制的控制效果區別不大,都能保證軌壓穩定要求。10 us以后,高壓油泵向共軌管的輸油量增大開始引起軌壓較大的波動,這時很明顯觀察到自適應神經模糊PID的波動幅度幅度較小,持續時間很短,控制效果遠優于常規PID,仍能維持起動開始時效果,而常規PID控制的軌壓曲線呈現振蕩式波動,最大軌壓超過80 MPa。
(2)加速工況。在圖10中可以看到,加速前期(0~13 us),軌壓曲線較平穩,兩種控制方法控制效果都比較理想。13 us時,常規PID控制的軌壓曲線開始出現大幅度的波動,軌壓在110 Mpa~150 Mpa之間變化,波動幅度高達40 Mpa,而自適應神經模糊PID控制的軌壓依然較穩定,最大幅度不超過5 Mpa。
5 結束語
本研究針對高壓共軌柴油機共軌壓力的控制問題,提出了一種新的共軌壓力控制算法。
通過仿真分析和實驗驗證,結果表明:自適應神經模糊PID控制器對軌壓進行控制時,系統響應曲線超調量很小,調節時間短、抗干擾能力強,能迅速恢復穩態;同時由實驗監測的軌壓曲線可以觀察到,自適應神經模糊PID控制在兩種過渡工況監測的軌壓波動曲線的波動幅度很小,遠比常規PID控制效果好,因此能為高壓共軌柴油機在復雜多變工況時,維持共軌壓力穩定提供了更加優越的控制方法。
本研究僅對控制算法控制模型進行了仿真分析和實驗驗證了軌壓穩定性,未驗證實際應用中對柴油機性能的具體影響。在今后研究中,將著重驗證軌壓控制算法在實際應用中對柴油機整體性能的改善效果。
[1] 金江善,平 濤,凌勵遜.柴油機高壓共軌燃油噴射系統共軌壓力控制技術研究[J].柴油機,2006,28(3):5-7.
[2] 王 瑞,于正同.一種高壓共軌柴油發動機的軌壓控制算法[J].測控技術,2015(12):86-89.
[3] 辛 喆,李亞平,張云龍,等.柴油機高壓共軌系統軌壓模糊控制與試驗[J].農業工程學報,2016(S1):34-41.
[4] 任衛軍,賀昱曜,張衛鋼.柴油機共軌壓力模糊自適應PID控制研究[J].計算機工程與應用,2010,46(2):209-212.
[5] 王國超,吳慶林.基于遺傳優化模糊PID高壓共軌系統噴油量的控制算法[J].重慶理工大學學報,2012,26(11):17-22.
[6] SIMONM, MILAN M, PRAUNSEIS Z. Mathematical model for the injector of a common-rail fuel-injection system[J].Engineering,2015,7(6):307-321.
[7] 楊 釗,王建華,吳玉平.基于模糊PID的無人水面艇直線路徑跟蹤[J].計算機工程,2014(10):270-274.
[8] 梁 娟,趙開新,陳 偉.自適應神經模糊推理結合PID控制的并聯機器人控制方法[J].計算機應用研究,2016(12):3586-3590.
[9] LI S W,DUAN X, LIU Z. The application of adaptive bp neural predictive fuzzy control in cement decomposing furnace temperature controlsystem[J].AppliedMechanicsandMaterials,2015,3773(722):173-177.
[10] 張 鑫,何志霞,張文權.柴油機噴嘴空蝕特性研究進展[J].液壓氣動與密封,2016(5):30-35.
[11] 尤麗華,安 偉,張美娟.基于神經網絡的柴油機共軌系統軌壓控制方法[J].中國農機化,2009(6):77-81.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
