基于機載LiDAR技術的高速公路勘測方法研究
2018-03-15 01:41:38廉福綿吳學超
山西建筑 2018年5期
廉福綿 張 衡 吳學超 李 通
(1.中交公路規劃設計院有限公司,北京 100088;2.山東省國土測繪院,山東 濟南 250103)
0 引言
機載激光雷達系統是一種集激光測距、全球定位系統(GPS)、慣性導航系統(INS)和CCD相機為一體的系統[1]。能夠同步獲取高精度的地面點云數據和影像數據,且受天氣影響較小、數據獲取速度快、精度高、產品多樣化等特征,具有傳統攝影測量方法不可比擬的優勢[2,3],引起了測繪界研究的濃厚興趣。
傳統的高速公路測量方法主要是應用水準儀、全站儀、GPS等測量設備對路線的地形圖、道路的縱橫斷面、沿線的主要構造物進行測量[4],以獲取滿足設計需要的數據。利用這些傳統技術雖然也能夠滿足精度要求,但是其效率低,需要對路線進行重復測量,成本較高[5]。特別是在山區植被茂密的區域,利用傳統的方法根本無法測量。因此,本文結合新泰至臺兒莊高速(以下簡稱新臺高速)公路勘測項目,對基于機載LiDAR技術的高速公路勘測方法進行了深入研究,并對其可行性進行了驗證分析。
1 項目實施
新臺高速位于山東省中南部,起自棗莊—臨沂市界附近,經山亭轉向東南穿劉嶺鐵礦,在棗莊市中區孟莊鎮設樞紐與棗木高速東延工程相聯,利用棗木高速東延工程至峨山樞紐,利用臨棗高速向西,在嶧城南互通和嶧城服務區間設樞紐向南新建,經泥溝鎮西,在臺兒莊區馬蘭屯鎮附近接X107落地。線路全長59.096 km,分為南北兩段,北段長約33.380 km,地形以低山丘陵為主,南段長約25.507 km,地形以平原為主。由于項目工期緊,任務重,采用傳統的勘測方法根本無法滿足項目勘察設計的工期要求,結合項目實際情況,提出了采用機載LiDAR技術進行沿線航空掃描,獲取線路的點云和影像數據,生產制作線路地形圖及縱橫斷面等成果,提供設計使用。
項目使用運5載人飛機搭載加拿大Optech公司生產的ALTM OrionH300型機載激光雷達系統。在進行航空掃描時,將測區劃分為2個分區,在線路中間架設地面基站,用于解算機載POS數據。項目共飛行了2個架次,15條航線,飛行相對高度1 200 m,掃描開角為全角45°,激光點旁向重疊度不低于50%,激光發射頻率300 kHz,激光發射頭掃描頻率30 Hz,點云密度4點/m2,每個架次設計一條構架航線,航高保持一致。項目實施基本流程如圖1所示。
2 數據處理
2.1 數據預處理
機載激光雷達航空掃描數據包括原始點云數據、機載POS數據、地面基站GPS數據及影像數據。點云數據預處理工作包括機載POS數據解算、點云航帶匹配、點云精度檢查等。經處理后,用RTK檢測點云精度情況如表1所示。
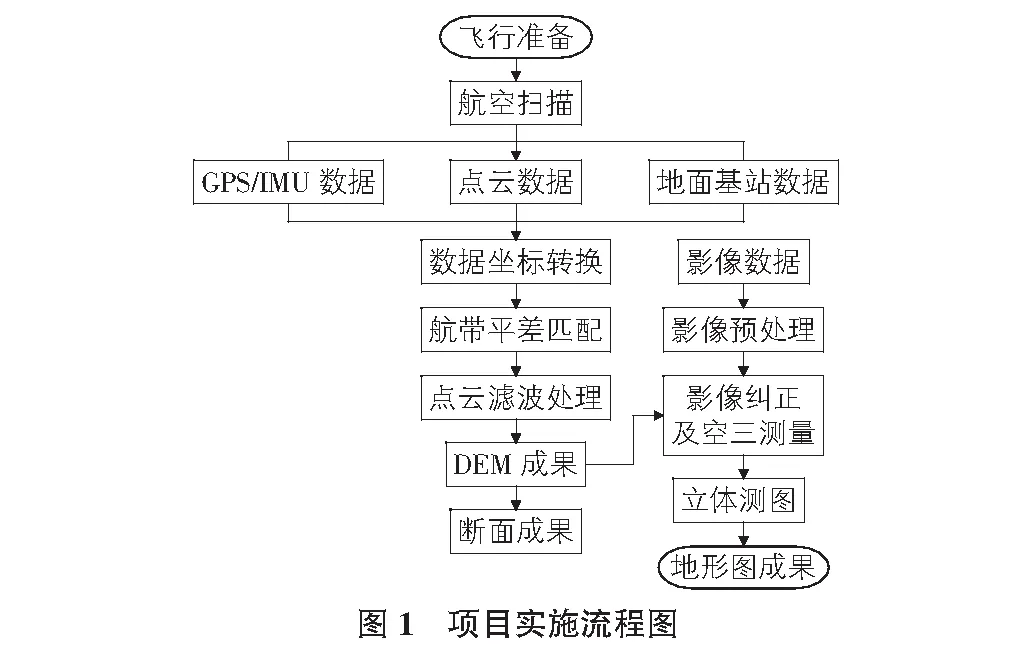

表1 點云精度統計表 m
2.2 基準轉換
機載LiDAR獲取的數據采用的是WGS84坐標系,高程采用的是大地高系統。本項目采用的是1980西安坐標系,正常高,所以要利用測區內分布均的首級控制點運用布爾沙模型計算出七參數[7],將點云數據的坐標換到1980西安坐標系。

其中,ΔX0,ΔY0,ΔZ0為3個平移參數;εX,εY,εZ為3個旋轉參數;m為尺度變化參數。
高程擬合利用沿線的首級控制點計算出其高程異常值,采用解析內插與三次樣條函數[8]法將點云高程由大地高轉換為正常高,得到工程坐標系下的點云成果。
2.3 點云濾波處理及DEM構建
機載LiDAR能夠獲取豐富的地面三維信息數據,包括地面植被、人工建筑物等,所以需要將點云進行濾波處理,濾除非地面點數據,得到地面點數據成果,并構建DEM[9],作為設計的基礎數據并用于制作線路的DOM,DLG及縱橫斷面。利用點云數據制作的數字高程模型如圖2所示。
2.4 道路斷面提取
斷面成果是道路設計最重要的成果之一,經處理后的點云數據和DEM成果,設計人員可以直接導入到緯地等道路設計軟件中,用于自動提取線路的縱橫斷面。基于高密度的點云數據成果,設計人員可以任意提取縱橫斷面,這也是機載LiDAR的一個巨大優勢。提取的斷面圖如圖3所示。


2.5 線路帶狀地形圖制作
機載LiDAR技術能夠同時獲取三維點云和影像數據,在地形圖的測繪與制作中有巨大的優勢,本項目利用LiDAR數據在無外業像控點的情況下快速制作線路帶狀地形圖,達到了1∶2 000地形圖的精度要求,大大節省了勘測設計成本和時間。利用LiDAR數據制作地形圖的工作包括:
1)地物要素數據的采集。利用LiDAR系統獲取的影像數據、POS數據和相機文件數據及點云數據在無外業像片控制點的情況下進行影像糾正和空中三角測量,恢復立體像對,快速采集地物要素數據。
2)地貌和高程注記點的采集。利用Terrasolid和南方CASS軟件在地面點云數據的基礎上自動提取高程注記點并生成等高線,改變了傳統攝影測量依靠立體測圖采集高程點和等高線的模式。
3)地形圖成果生成。將地物要素和地貌要素的綜合處理,經過內業編輯整飾即可得到帶狀地形圖成果。
3 成果精度分析
為了驗證機載LiDAR技術在山區高速公路勘測中的可行性,對地形圖精度和橫斷面精度進行了檢查。
1)地形圖精度的檢查。利用GPS RTK的方法在道路交叉口處、房屋角點均勻采集了647個平面點,在硬化地面、農田等處均勻采集了1 151個高程點,對地形圖的平面和高程精度分別進行計算分析,誤差統計表如表2,表3所示。
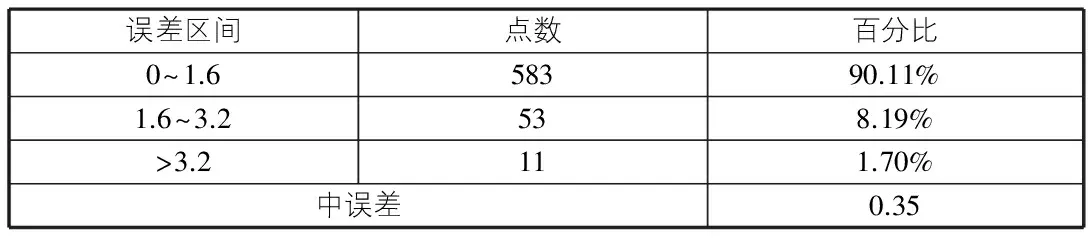
表2 平面誤差統計

表3 高程誤差統計
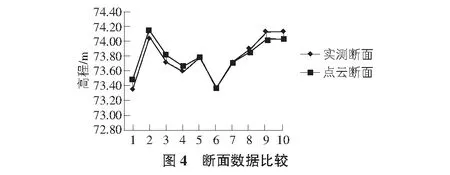
2)斷面精度檢查。利用RTK測量結合水準測量的方式在道路沿線每隔2 km采集一條橫斷面,并與激光點云提取的橫斷面數據進行對比,如圖4所示,列出了點云斷面和實測斷面的對比圖,其中最大的點高差為15.3 cm,中誤差為9.2 cm,表明機載LiDAR的橫斷面測量精度完全能夠滿足高速公路勘測設計的精度要求。
根據規范要求,山地1∶2 000地形圖平面位置中誤差為1.6 m,高程中誤差為1.2 m,以2倍中誤差為限差。經過外業檢查分析,利用機載LiDAR技術無像控點制作的地形圖平面和高程精度均優于規范對1∶2 000地形圖的精度要求,數字高程模型和斷面的精度也遠高于規范要求,完全能夠滿足高速公路勘測設計的需要。
4 總結與展望
機載LiDAR系統能夠同時獲取高精度、高密度的點云數據和高分辨率的影像數據,原始數據經過簡單處理即能夠獲取高精度的地面點云成果、數字高程模型成果以及數字線劃圖成果,本文結合新臺高速公路勘測項目,對基于機載LiDAR數據制作數字高程模型、數字線劃圖、道路斷面提取等進行了深入研究,經過驗證其成果能夠滿足高速公路勘測設計的精度要求,提高了高速公路勘測設計效率,縮短了勘測周期。并得出以下結論:
1)機載LiDAR技術在制作高速公路帶狀地形圖時,可以在無像控點的條件下,利用POS數據和點云數據對影像進行糾正,能夠滿足1∶2 000地形圖的精度要求。
2)機載LiDAR技術獲取的點云數據精度較高,能夠用于高速公路的勘測設計。
3)機載LiDAR技術與其他測量手段相比,精度高,速度快,點云覆蓋全面,非常適用于高速公路勘測項目。
隨著機載LiDAR技術的進一步成熟,必將成為以后高速公路勘測設計的主流手段,對于推動高速公路勘測設計手段的進步和測繪新技術的廣泛應用有重要意義。
[1] 謝向進,黃紀晨.LiDAR測量技術在公路測設中的應用分析[J].測繪與空間地理信息,2013(6):92-95.
[2] 王 煒.利用機載LiDAR測繪大比例尺數字地形圖的精度分析[J].測繪通報,2012(6):34-36.
[3] 郭向前,郝偉濤,李 響.基于機載LiDAR技術的研究及其展望[J].測繪與空間地理信息,2013(2):69-72.
[4] 李青岳,陳永奇.工程測量學[M].第3版.北京:測繪出版社,2008:30-50.
[5] 黃文元,黨建軍,黃愛華.我國公路改擴建工程勘測方法比較分析[J].公路,2011(3):83-86.
[6] XU Bin,LI Yingcheng,LIU Xiaolong,et al.The Application of Bundle Block Adjustment with Constraint Conditions in Platform Clibration of Four-Head Aerial Digital Camera[J].Acta Geodaetica et Cartographica Sinica,2014,43(1):66-73.
[7] 孔祥元,郭際明,劉宗泉.大地測量學基礎[M].武漢:武漢大學出版社,2010.
[8] 楊 穎,朱 磊,張 省,等.直升機載LiDAR測量技術在高速公路改擴建勘測中的應用[J].地理信息世界,2015,22(5):104-107.
[9] 靳克強,龔志輝,王 勃,等.機載激光雷達數據提取DEM的關鍵技術分析[J].測繪工程,2010(6):39-42.
[10] 張小紅.機載激光雷達測量技術理論方法[M].武漢:武漢大學出版社,2007.
猜你喜歡
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中國公共安全(2017年7期)2017-10-13 08:18:11
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年9期)2017-04-17 03:01:00
中國交通信息化(2016年9期)2016-06-06 07:42:10
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06
