考慮摩擦的空間抓捕過程碰撞動力學分析與控制
2018-03-20 03:00:39,,*
中國空間科學技術 2018年1期
關鍵詞:模型
,,*
1. 西北工業大學 航天飛行動力學技術國家級重點實驗室,西安 710072 2. 西北工業大學 航天學院,西安 710072
隨著空間技術的不斷發展,空間機器人因其低風險、低成本等特點,在大型航天器組裝、故障衛星維修、空間碎片清除等任務中將發揮越來越重要的作用。空間機器人在執行空間抓捕任務時,除了與目標產生法向碰撞外,還存在切向摩擦作用,這些作用將對機器人位姿產生影響,甚至破壞機器人與目標的結構,從而導致任務失敗。因此,對空間抓捕過程的動力學研究是執行空間任務的關鍵技術之一。但是目前的研究大多是針對碰撞進行建模,而沒有考慮摩擦因素的影響[1-4]。在抓捕目標的過程中,摩擦會阻礙機器人手爪和目標接觸的相對運動,影響接觸過程的動力學響應,從而對空間抓捕過程中的分析與精確控制有著不容忽視的影響。因此,在進行碰撞問題分析的同時,考慮摩擦因素的影響,對空間機器人抓捕目標過程中的動力學理論分析與控制具有十分重要的意義。
由于摩擦機理十分復雜,很難從數學上建立統一的模型,自16世紀Leonardo最先研究摩擦現象開始,至今已經有數十種摩擦模型[5]。文獻[6-8]對空間機構關節間隙的碰撞和摩擦進行了研究,閻紹澤等[9]對多體系統間隙運動副的碰撞及摩擦建模方法進行了綜述,但這些研究均未涉及空間抓捕過程中機械臂末端執行器與目標表面間的摩擦建模。Wu等[10]對空間抓捕轉動目標中的接觸動力學與控制進行了研究,其中摩擦力采用鬃毛摩擦模型進行建模,但是沒有分析摩擦因素對抓捕過程的影響。同時,在實際應用中,鬃毛摩擦模型的參數辨識存在困難。張海博等[11]的研究中只考慮了滑動摩擦,沒有考慮粘滯摩擦的影響。
通常,摩擦模型可按照摩擦現象是否由微分方程描述分為動態摩擦模型(如鬃毛摩擦模型)和靜態摩擦模型(如庫倫摩擦模型)[12]。文獻[5]系統地介紹了幾種較為常用的摩擦模型,并對每一種模型的構成、特點和適用范圍進行了詳細論述。在實際應用中,靜態摩擦模型參數辨識簡單,但是無法描述靜止狀態的摩擦現象。動態摩擦模型能很好地對靜止狀態的摩擦現象進行建模,但是模型復雜,參數辨識非常困難。
從運動學的角度考慮,靜止狀態接觸面切向方向可看作一個約束,通過引入約束方程,結合拉格朗日乘子建立動力學方程,從而可以求解出靜摩擦力,這種方法被稱為接觸約束法或拉格朗日乘子法。與動態摩擦模型相比,這種方法無需考慮模型的參數辨識問題,應用簡單。因此,本文結合拉格朗日乘子法和庫倫模型的特點,在切向滑動狀態根據庫倫摩擦理論進行摩擦力建模,而在切向粘滯狀態利用拉格朗日乘子法求解摩擦力。這樣,既避免了動態摩擦模型參數辨識問題,又彌補了庫倫理論無法對粘滯狀態下摩擦力進行建模的不足。將求解得到的摩擦力與基于Hertz接觸理論求得的碰撞力進行合成,作為對碰撞模型的修正,從而計算抓捕過程中的動力學響應。同時,針對抓捕完成后基座姿態的漂移問題,設計了控制器進行穩定控制。
1 空間機器人動力學模型
單臂剛性空間機器人系統的一般構型如圖1所示。
其中,C0,C1,…,Cn分別表示基座和各個桿的質心位置,J1,J2,…,Jn分別代表各個關節,OI-XIYIZI為空間慣性坐標系,O-XYZ為原點在基座質心的基座固連坐標系,Oi-XiYiZi(i=1,2,…,n)分別為原點在各個關節的機械臂固連坐標系。
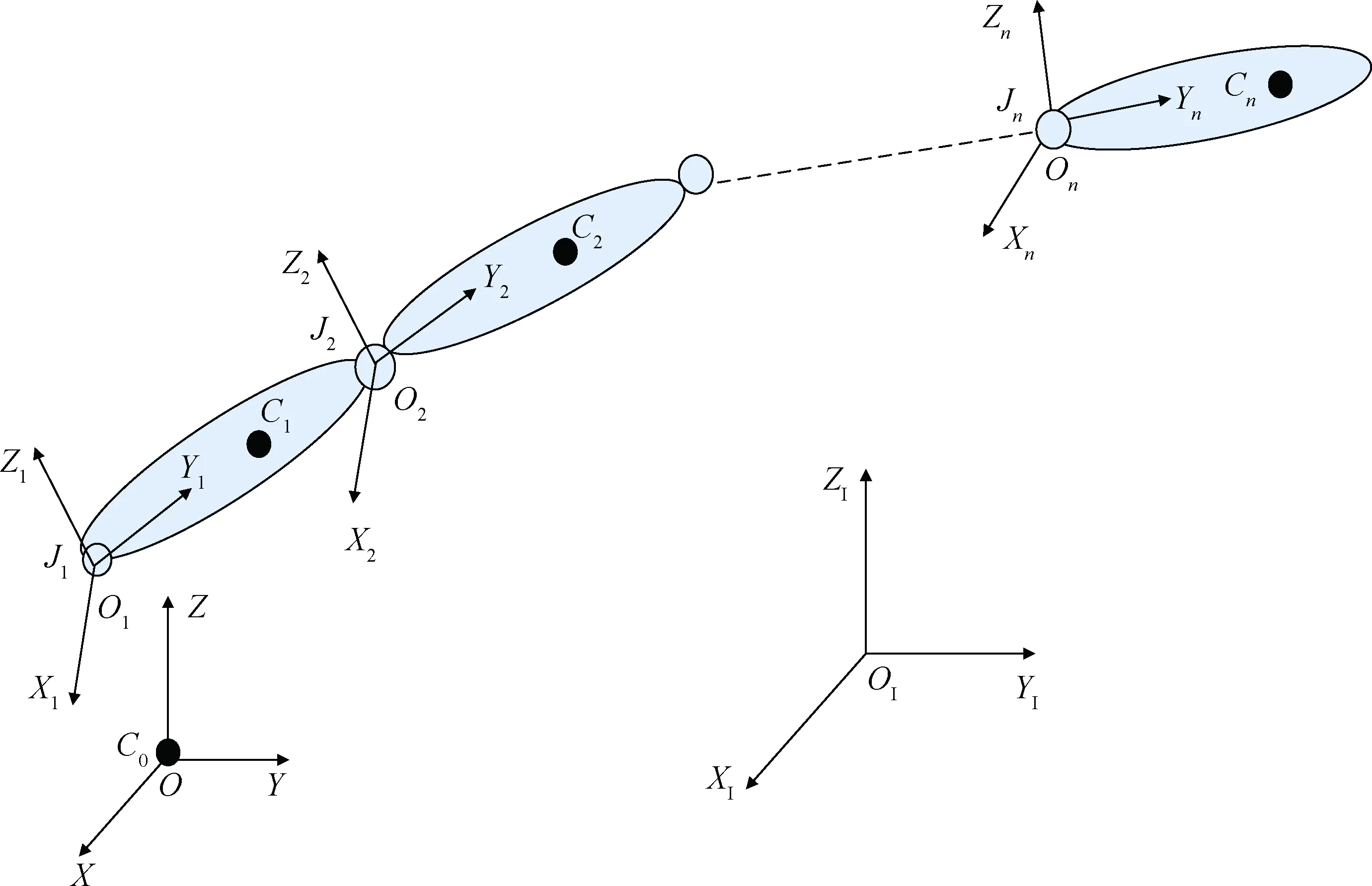
圖1 空間機器人系統Fig.1 Space robot system
空間機器人系統總動能可寫為:
(1)

在空間微重力環境下,忽略空間機器人的重力勢能,則系統的第二類拉格朗日方程為:
(2)
式中:Q為作用在系統上的廣義力。
將式(1)帶入式(2),整理得:
(3)

則整個系統的動力學方程為:
(4)
2 碰撞模型
兩個物體碰撞過程中既存在法向方向的碰撞力,又有切向方向的摩擦力,一般認為這兩種力之間耦合作用很小,兩者可以獨立建模[14]。本節首先建立基于Hertz接觸理論的碰撞力模型;其次,針對現有對空間抓捕碰撞過程摩擦因素考慮不足的問題,結合庫倫摩擦理論和拉格朗日乘子法建立摩擦力的計算模型,作為對碰撞模型的修正,同時給出了摩擦狀態轉換準則及轉換時刻的確定方法。
2.1 碰撞力建模
碰撞動力學的建模方法主要有沖量動量法、連續碰撞力法,以及基于連續介質力學的有限元法。其中,基于Hertz接觸理論的連續碰撞力法可以得到碰撞力在碰撞期間隨時間的變化規律,是研究碰撞機理的重要手段。
基于Hertz理論建立的碰撞力的表達式如下:
(5)
由式(5)可知,當碰撞物體材料屬性已知,并知道嵌入深度時,則可計算出兩物體之間的碰撞力。從而進一步計算出作用在機器人末端上的力和力矩,代入式(4)中,即可得到空間機器人在碰撞過程中的動力學響應結果。
2.2 考慮摩擦的修正碰撞建模
兩個接觸物體之間切向運動狀態分為粘滯狀態和滑動狀態。在粘滯狀態下,兩物體之間的摩擦力為靜摩擦力,滑動狀態下接觸物體之間為動摩擦力。經典庫倫摩擦定律在求解滑動摩擦力時結構簡單,參數辨識容易,但是無法求解靜摩擦力。而在粘滯狀態下,切向為一個運動學約束,利用拉格朗日乘子法可以求解靜摩擦力。
因此,本文摩擦力的建模方法是:滑動狀態下的動摩擦力仍采用經典庫倫摩擦理論進行建模,然后與碰撞力進行矢量合成得到修正碰撞模型。而計算粘滯狀態下的靜摩擦力時,根據接觸物體切向的運動學關系建立運動學方程,再利用拉格朗日乘子法將其與系統動力學方程聯立,建立修正碰撞動力學模型。
(1)滑動狀態下的摩擦力
由經典庫倫摩擦理論可知,滑動狀態下的摩擦力為:
Ff=-μFn
(6)
式中:μ為動摩擦系數;Fn為法向碰撞力,負號表示摩擦力與切向運動方向相反。
(2)粘滯狀態下的摩擦力
當兩物體處于粘滯摩擦狀態時,切向可以看作一個接觸約束,并且粘滯摩擦力等于接觸約束力。下面推導這個約束力的計算公式。
設接觸點在機械爪上用P表示,在目標上用T表示,則粘滯狀態下系統的約束方程為:
Y(q,qt,t)=Pτ-Tτ=0

(7)
(8)

將式(8)代入式(7),可得:
(9)

聯立式(4)和式(9),可以得到空間機器人在粘滯摩擦狀態下的修正碰撞模型,即:
(10)
式中:Q′為作用在空間機器人上除摩擦力以外的廣義力;λf為拉格朗日乘子,即靜摩擦力。由式(10),可以求解出拉格朗日乘子λf為:
(11)
(3)滑動-粘滯狀態轉換準則及轉換時刻
兩個接觸物體在切向相對速度方向發生變化的時候會出現滑動-粘滯狀態的轉換,下面給出狀態轉換準則:假設在t0時刻處于粘滯狀態,利用式(11)計算出粘滯摩擦力,再將其與最大靜摩擦力作對比。若計算出的粘滯摩擦力小于最大靜摩擦力,則該時刻狀態為粘滯狀態,相應的摩擦力即為粘滯靜摩擦力,此時可以直接進行下一步計算;若大于最大靜摩擦力,則該時刻為滑動狀態,此時應按照滑動狀態下摩擦力計算公式計算出動摩擦力,再進行下一步計算。狀態轉換準則可以簡便表示如下:
式中:μs為靜摩擦系數。
滑動-粘滯狀態的轉換發生在兩物體切向相對速度為零的時刻;當相鄰兩個時刻切向相對速度的方向發生變化時,中間必然存在速度為零的時刻。因此,當切向相對速度發生改變時,可采用二分法,通過多次迭代,找出速度為零的時刻。
以上即為求解摩擦力的全部過程,當求解出摩擦力后,將其與第2.1節求得的碰撞力進行矢量合成,再帶入式(4),即可求解空間抓捕過程中機器人的動力學響應。圖2給出了整個抓捕過程的仿真流程。
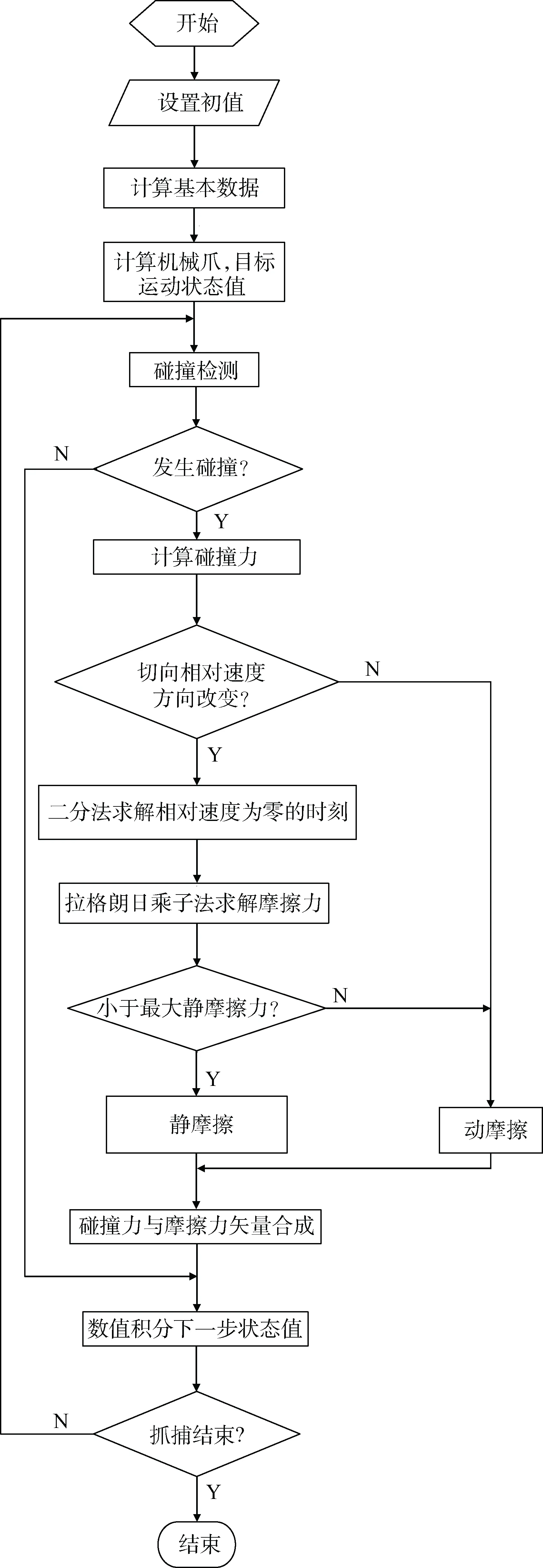
圖2 抓捕過程仿真流程Fig.2 Flow chart of simulation
3 仿真驗證
為了驗證本文所建立的模型及相應算法,本節以圖3所示的模型進行數值仿真。空間機器人由一個均質正方體基座、兩個均質連桿及末端執行器構成,其幾何尺寸與質量特性見表1。限于篇幅,僅考慮機器人關節鎖死的情況,并假設整個抓捕過程在XOY平面內進行。

圖3 抓捕初始位置示意Fig.3 Initial position for capture
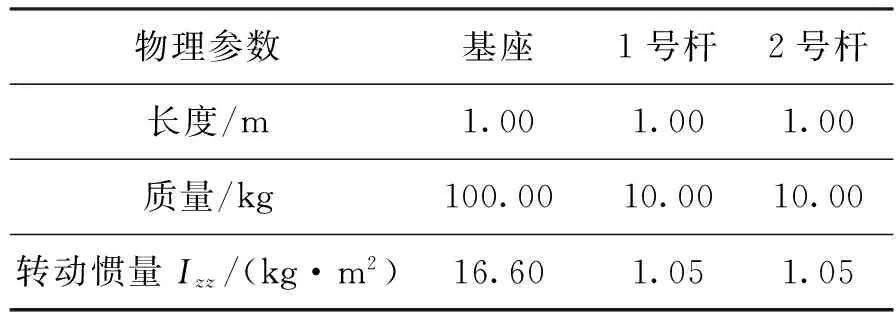
物理參數基座1號桿2號桿長度/m1.001.001.00質量/kg100.0010.0010.00轉動慣量Izz/(kg·m2)16.601.051.05
機器人手爪的構型如圖3所示,兩只機器人手爪分別由兩根完全相同的剛性桿構成,每根桿的長度均為0.3 m,質量均為0.3 kg,轉動慣量均為0.15 kg·m2。目標為圓柱體且軸線平行于慣性坐標系中的OZ軸,目標質量為5 kg,底面圓半徑為0.15 m。機器人手爪和目標的材料均為低碳鋼,其楊氏模量E1=E2=2.06×1011Pa,泊松比μ1=μ2=0.3。機器人基座在慣性坐標系中的初始位置為[0 m,0 m,0°]T,初始速度為[0 m/s,0 m/s,0(°)/s]T。機械臂初始關節角度為[30°,-30°]T,且關節角在整個抓捕過程中保持不變,即基座和兩個桿可視為一個剛體。機器人手爪EA1與A1B1,EA2與A2B2之間的夾角均135°,且夾角不變。桿EA1和桿EA2相對于三號桿軸線的初始角度為[45°,-45°],仿真開始后,兩只機器人手爪分別以1 rad/s的角速度向內合攏。目標在慣性坐標系中的初始位置為[2.6 m,0.5 m,0°]T,初始速度為[-0.1 m/s,0 m/s,0(°)/s]T。
抓捕開始后,兩只機器人手爪在作用于關節E上的控制力矩T的作用下逐漸合攏捕獲目標,當目標被牢固捕獲后,目標作用于關節E上的力矩與控制力矩T相等,抓捕結束。控制力矩為:
Ti=k×(ωr-ωzi),i=1,2
(12)
式中:k為常值系數;ωr和ωzi分別為手爪轉動的期望值和實際值。
圖4和圖5分別為抓捕過程中空間機器人在x方向和y方向的受力情況。從圖中可以看出,t=0.065 2 s,目標與機器人手爪發生第一次碰撞,0.004 s后分離;t=0.115 9 s,目標與手爪的另一端進行了第二次碰撞,0.000 4 s后又一次分離。這樣反復幾次,直到機器人手爪每根桿均與目標接觸。此后經過多次連續碰撞,直至機器人手爪完全抓緊目標,機器人的受力變為零,抓捕過程結束。
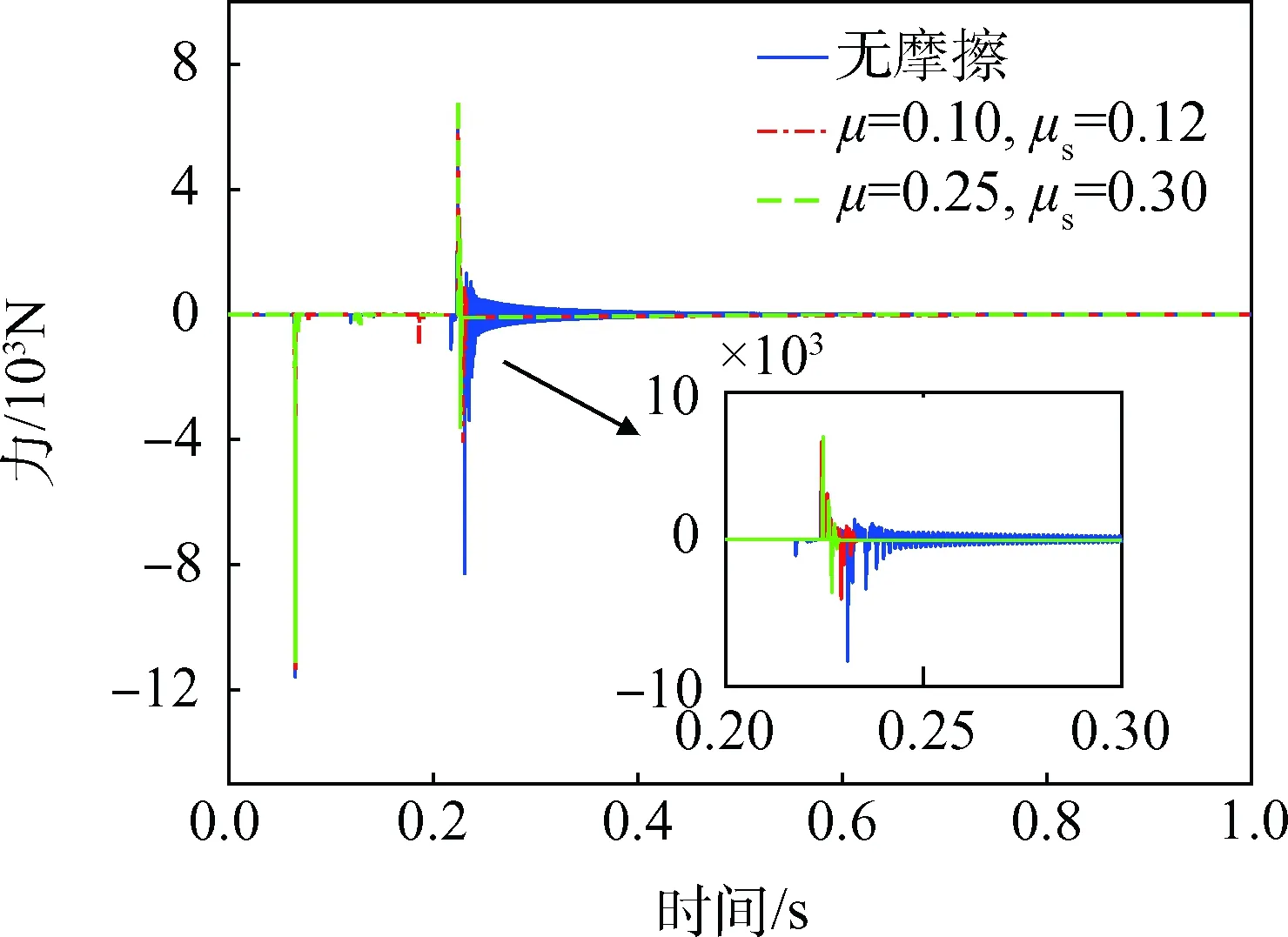
圖4 空間機器人x方向受力Fig.4 Reaction force on the x-coordinate of the space robot
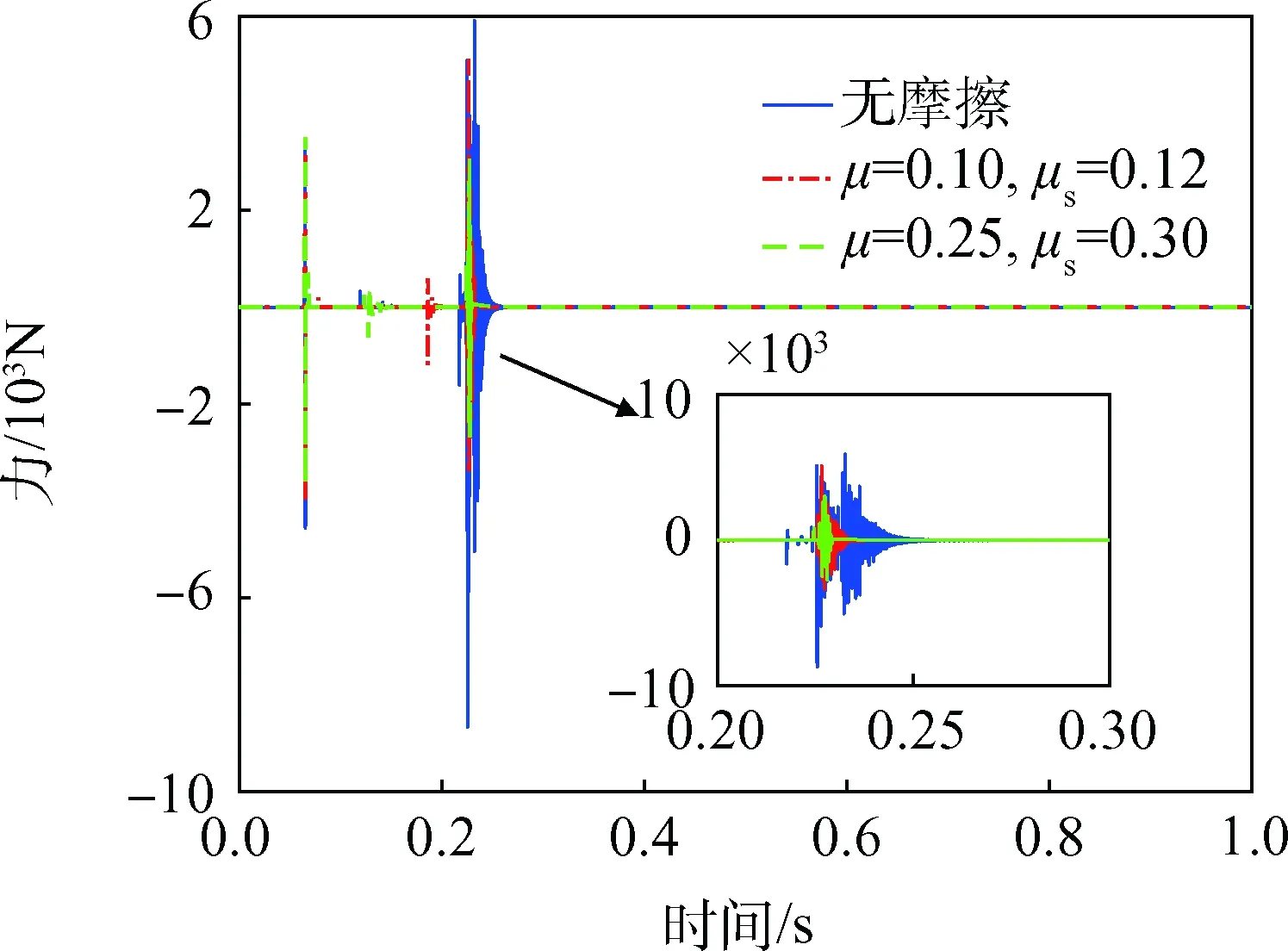
圖5 空間機器人y方向受力Fig.5 Reaction force on the y-coordinate of the space robot
仿真考慮了兩組摩擦因素的影響,其中μ和μs分別是動摩擦因子和靜摩擦因子。由圖4和圖5可以看出,摩擦越大,抓捕過程中機器人的受力越小,且抓捕過程更快結束。
圖6分別為機器人基座姿態角和姿態角速度的變化情況。從圖中可以看出,碰撞使得姿態角速度發生復雜的變化,且摩擦越小,變化越劇烈。抓捕完成后,基座姿態角速度保持常值,使得姿態不斷變大。
圖7為考慮第一組摩擦時整個抓捕過程中動量和角動量的變化情況。三幅圖分為為x方向、y方向線動量以及角動量的變化,其中藍線表示機器人和目標總的動量和動量矩,紅線表示機器人系統的動量和動量矩,綠線表示目標的動量和動量矩。由圖中結果可以看出,碰撞發生后,機器人和目標的動量和角動量發生相應變化。由于沒有外力作用,機器人和目標整體的動量和角動量守恒,仿真結果說明了所建模型的正確性。
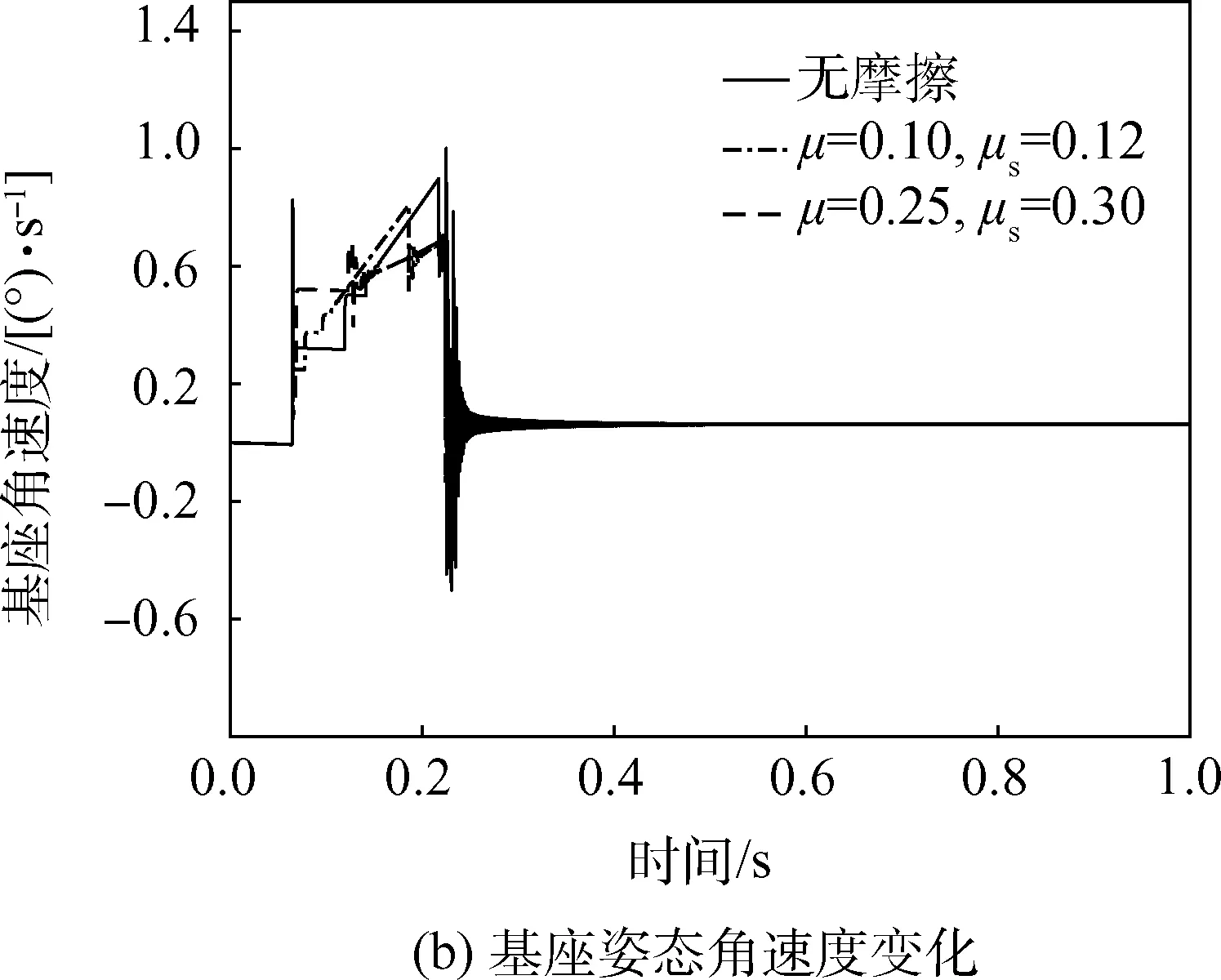
圖6 基座姿態角與角速度變化Fig.6 Attitude angular and angular velocity of the base
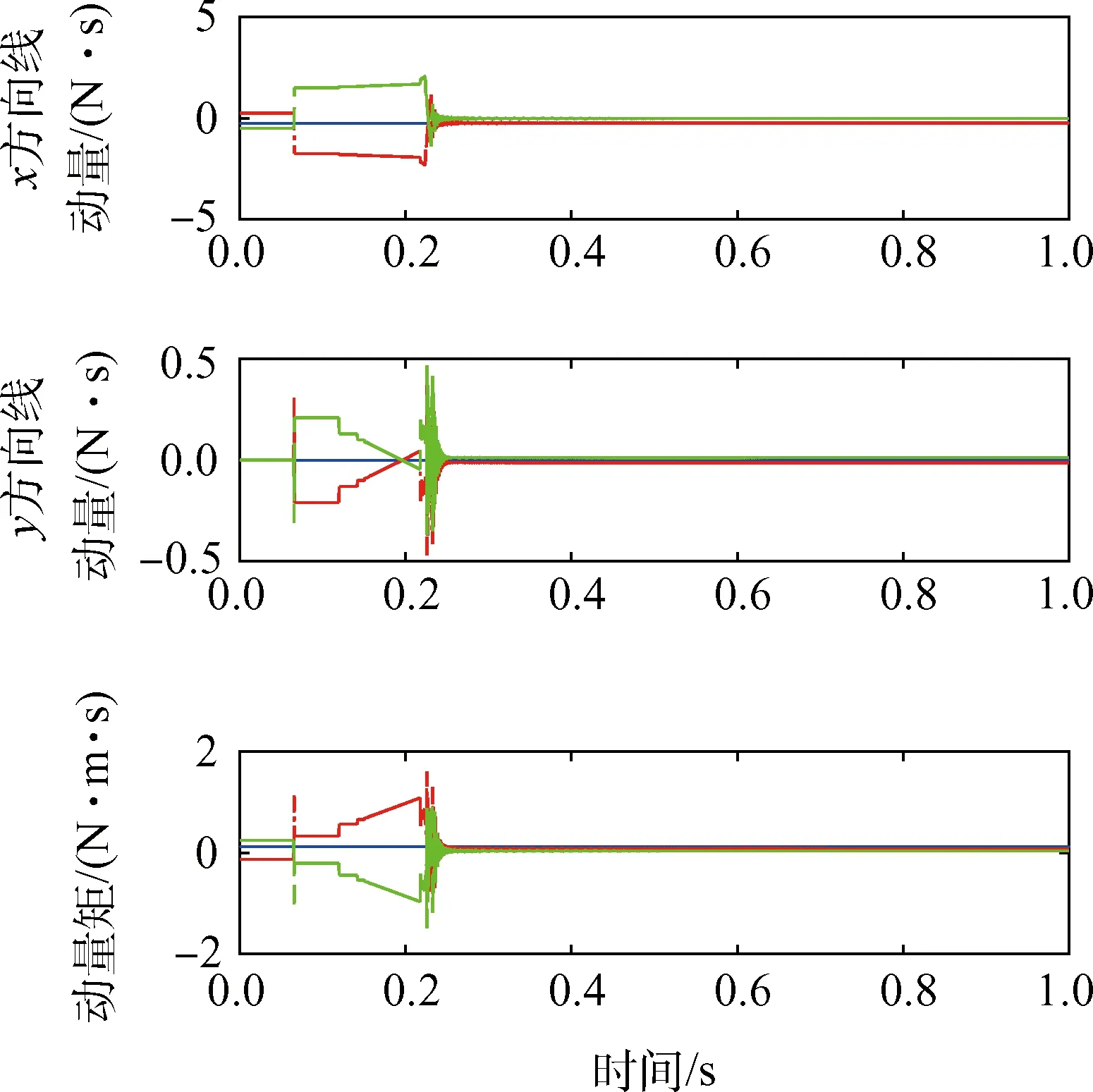
圖7 抓捕過程中的動量與角動量變化Fig.7 Linear and angular momentum in capture
由于抓捕過程中碰撞力的作用,空間機器人捕獲目標后基座姿態會產生漂移,不利于后續操作。目前,針對空間機器人的姿態控制已有了大量研究[15-18]。這些文章都在傳統控制方法的基礎上,考慮了參數不確定等實際中可能出現的問題,結合魯棒、自適應等理論對空間機器人控制進行了研究。然而,當空間機器人和目標參數全部已知時,這些控制就會顯得復雜臃腫。基于微分幾何的反饋線性化方法通過將復雜的空間機器人非線性動力學模型進行線性化處理,使得控制器的設計變得簡單便捷,并可以實現各個方向的解耦控制。因此,本文基于反饋線性化的解耦控制方法,設計控制器實現對抓捕后組合體的穩定控制。組合體的動力學方程與式(4)相似:

(13)
與式(4)相比,H′和C′中包含了目標的質量特性。在機械臂關節鎖死的情況下,F′為作用在基座上的控制力和控制力矩。
將式(13)寫成狀態空間方程的形式:
(14)
式中:u=F′為控制向量。
式(14)中的非線性存在于H′和C′中,根據反饋非線性思想,可設u=C′,此時,系統線性化為:
(15)
設廣義坐標q的期望值為qd,偏差e=qd-q,則
u=H′v+C′
(16)
式中:
(17)
式中:kD和kP分別為微分系數矩陣和比例系數矩陣。
將式(16)代入式(14)中,可得:
(18)
可知,只要kD和kP正定,則e就可以趨于0,q就可以趨于期望值。
二階線性系統控制器參數可由極點配置的方法確定,在實際應用中可根據具體需要配置合適的極點。本文選取了3組控制器參數,使系統分別處于欠阻尼、臨界阻尼和過阻尼狀態,3組控制參數分別用No.1,No.2和No.3表示,取值見表2。抓捕完成后整個系統只剩下3個自由度,所以控制器參數取為三階對角陣。圖8展示了碰撞結束后對空間機器人基座姿態進行控制后的結果。從仿真結果可以看出,碰撞結束后,在沒有進行控制的情況下,機器人基座存在常值姿態角速度,姿態將會發散。而進行了控制之后,經過一段時間機器人基座姿態角速度變為零,姿態也回到原來的位置,即期望位置,這說明了所設計的控制器的有效性。而3組控制器的控制效果也各有不同,其中第1組為欠阻尼系統,響應速度最快,但控制過程會出現較大的振蕩和超調。第2組相對阻尼系數接近于臨界阻尼,因此響應較快,且不會出現振蕩和超調。第3組在控制過程中姿態角速度的變化最小,但控制時間最長。實際應用中應根據具體情況選擇控制器系數,使控制響應滿足工程要求。
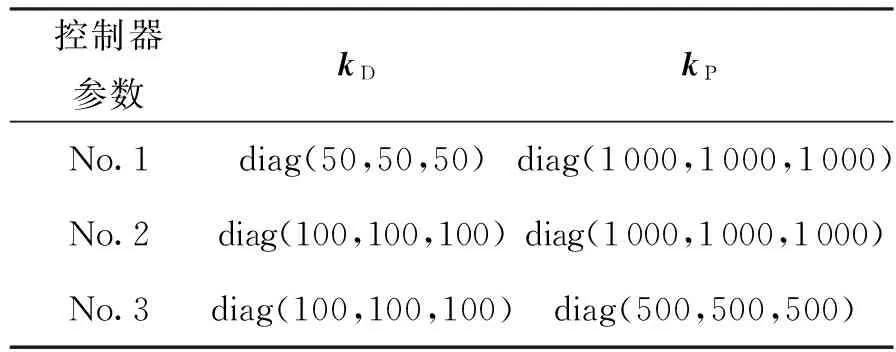
表2 控制器參數取值
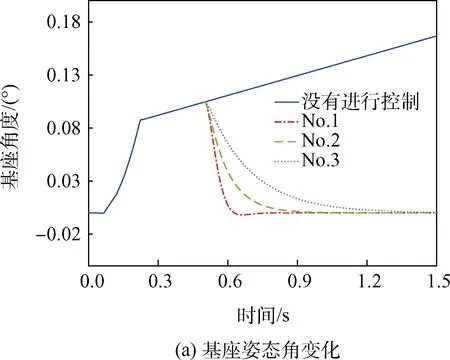
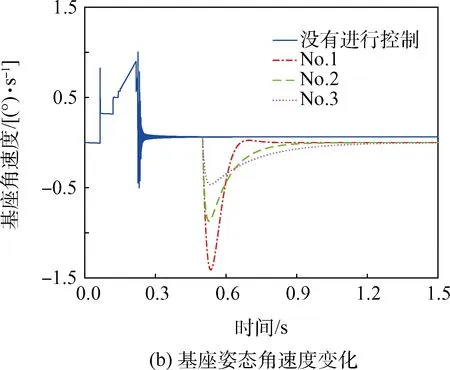
圖8 基座受控與無控條件下姿態角與角速度變化Fig.8 Attitude angular and angular velocity of the base with and without controller
4 結束語
空間機器人抓捕目標過程中的碰撞動力學一直是研究熱點和難點。本文主要針對空間單剛性臂機器人抓捕目標過程中的碰撞動力學進行了研究,重點是利用庫倫摩擦理論和拉格朗日乘子法建立了考慮摩擦的修正碰撞模型。從仿真結果可以看出,整個碰撞過程動力學響應復雜,具有強非線性的特點;從動力學特性方面考慮,整個抓捕過程符合動量守恒;摩擦因素會造成碰撞系統的能量損失,使碰撞過程更快結束。抓捕完成后的機器人基座存在較大的姿態漂移,采用本文設計的控制器能夠對漂移進行有效的穩定控制。拉格朗日乘子法能很好地彌補庫倫摩擦定律對靜摩擦力建模的不足,但是其數值求解比較困難,特別是多點碰撞時系統矩陣維數變化情況復雜,不利于編程仿真,如何改進其數值仿真效率,是未來的一個研究方向。
References)
[1] ZHENG Y F. Collision effects on two coordinating robots in assembly and the effect minimization[J]. Systems Man & Cybernetics IEEE Transactions on,1987,17(1):108-116.
[2] 陳剛,賈慶軒,孫漢旭,等. 空間機器人目標捕獲過程中碰撞運動分析[J]. 機器人,2010,32(3): 432-438.
CHEN G,JIA Q X,SUN H X,et al. Analysis on impact motion of space robot in the object capturing process[J]. Robot,2010,32(3):432-438(in Chinese).
[3] SHIBLI M,AGHILI F,SU C Y. Modeling of a free-flying space robot manipulator in contact with a target satellite[C]∥Proceedings of 2005 IEEE Conference on Control Applications,28-31 August,Toronto,Canada,2005:559-564.
[4] UYAMA N,NAKANISHI H,NAGAOKA K,et al.Impedance-based contact control of a free-flying space robot with a compliant wrist for non-cooperative satellite capture[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems, 7-12 October,Vilamoura,Algarve,Portugal,2012:4477-4482.
[5] 劉麗蘭,劉宏昭,吳子英,等. 機械系統中摩擦模型的研究進展[J]. 力學進展,2008,38(2):201-213.
LIU L L,LIU H Z,WU Z Y,et al. An overview of friction models in mechanical systems[J]. Advances in Mechanics,2008,38(2):201-213(in Chinese).
[6] YANG Z,ZHENG F B. Dynamics analysis of space robot manipulator with joint clearance[J].Acta Astronautica,2011,68(7-8):1147-1155.
[7] 閻紹澤. 航天器中含間隙機構非線性動力學問題及其研究進展[J]. 動力學與控制學報,2004,2(2):50-54.
YAN S Z. Development and problems of nonlinear dynamics of the mechanisms with clearances for spacecrafts[J]. Journal of Dynamics and Control,2004,2(2):50-54(in Chinese).
[8] 胡海巖,田強,張偉,等. 大型網架式可展開空間結構的非線性動力學與控制[J]. 力學進展,2013,43(4):390-414.
HU H Y,TIAN Q,ZHANG W,et al. Nonlinear dynamics and control of large deployable space structures composed of trusses and meshes[J]. Advances in Mechanics,2013,43(4):390-414(in Chinese)
[9] 閻紹澤,向吳維凱,黃鐵球. 計及間隙的運動副和機械系統動力學的研究進展[J]. 北京大學學報(自然科學版),2016,52(4):741-755.
YAN S Z,XIANGWU W K,HUANG T Q. Advances in modeling of clearance joints and dynamics of mechanical systems with clearances[J]. Acta Scientiarum Naturalium Universitatis Pekinensis,2016,52(4):741-755(in Chinese).
[10] WU S,MOU F,MA O. Contact dynamics and control of a space manipulator capturing a rotating object[C].AIAA Guidance,Navigation,and Control Conference,9-13 Febuary,Grapevine,Texas,2017:1-12.
[11] 張海博,王大軼,魏春嶺. 空間機器人加注機構碰撞力建模與柔順控制[J]. 中國空間科學技術,2015,35(4):1-9.
ZHANG H B,WANG D Y,WEI C L. Contact dynamics model of refueling device and compliance control for space robot[J]. Chinese Space Science and Technology,2015,35(4):1-9(in Chinese).
[12] AWREJCEWICZ J,OLEJNIK P.Analysis of dynamic sys-tems with various friction laws[J]. Applied Mechanics Reviews,2005,58(6):389-411.
[13] 王委鋒,羅建軍,馬衛華. 自由漂浮空間機器人動力學建模與仿真研究[J]. 科學技術與工程,2011,11(13):3004-3008.
WANG W F,LUO J J,MA W H. Study on dynamics modeling and simulation of free-floating space robot[J]. Science Technology and Engineering,2011,11(13):3004-3008(in Chinese).
[14] 錢震杰,章定國. 含摩擦碰撞柔性機械臂動力學研究[J]. 振動工程學報,2015,28(6):879-886.
QIAN Z J,ZHANG D G. Frictional impact dynamics of flexible manipulator arms[J]. Journal of Vibration Engineering,2015,28(6):879-886(in Chinese).
[15] WALKER M W,WEE L B. Adaptive control of space-based robot manipulators[J]. Robotics & Automation IEEE Transactions on,1991,7(6):828-835.
[16] 王益平,趙育善,師鵬,等. 捕獲目標后組合體航天器抗干擾自適應控制[J]. 中國空間科學技術,2015,35(6):20-28.
WANG Y P,ZHAO Y S,SHI P,et al. Adaptive control for stabilizing the coupling system with disturbance after capturing spacecraft[J]. Chinese Space Science and Technology,2015,35(6):20-28.
[17] 陳志勇,陳力. 具有外部擾動及不確定系統參數的漂浮基空間機器人關節運動的增廣魯棒控制[J]. 空間科學學報,2010,30(3):275-282.
CHEN Z Y,CHEN L. Robust control for space-based robot with external disturbances and uncertain parameters in joint space[J]. Space Science,2010,30(3):275-282(in Chinese).
[18] ZHANG T,YUE X K,NING X,et al. Stabilization and parameter identification of tumbling space debris with bounded torque in postcapture[J]. Acta Astronautica,2016,123:301-309.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
