加裝新型仿形加載機(jī)構(gòu)免耕播種機(jī)的動態(tài)模擬
2018-03-20 00:56:10李寶筏孟凡成何倍倍張桐嘉
干旱地區(qū)農(nóng)業(yè)研究 2018年1期
林 靜,錢 巍,李寶筏,孟凡成,何倍倍,齊 林,張桐嘉
(沈陽農(nóng)業(yè)大學(xué)工程學(xué)院, 遼寧 沈陽 110866)
保護(hù)性耕作的關(guān)鍵是免耕播種技術(shù),免耕播種機(jī)是保護(hù)性耕作機(jī)具的重點和難點。免耕播種機(jī)與普通播種機(jī)的不同主要表現(xiàn)在作業(yè)條件差,地表殘茬、秸稈、雜草覆蓋,土壤堅硬,壟形不整,造成播種機(jī)易壅堵、播種深度不易把握等[1-3]。它不僅需要具備普通播種機(jī)的性能,還要能夠在地表有前茬作物根茬或秸稈覆蓋的情況下實現(xiàn)免耕播種。播種深度受到地表不平度及土壤阻力的影響,播種深度變化是一個動態(tài)過程。鑒于國內(nèi)外對機(jī)械免耕播種仿形加載機(jī)構(gòu)的工作機(jī)理與參數(shù)優(yōu)化基礎(chǔ)理論,尤其是動態(tài)過程理論,缺乏系統(tǒng)性的研究[4-7],為了提高免耕施肥播種的質(zhì)量,除了進(jìn)行必要的破茬防堵外,還必須考慮免耕施肥播種機(jī)的仿形性能,即在地表不平條件下保持播種深度一致的能力[8-9]。為保證播種深度穩(wěn)定,系統(tǒng)研究播種深度變化的動態(tài)過程,在對2BG-2型玉米壟作免耕播種機(jī)進(jìn)行改進(jìn)基礎(chǔ)上,本文開展新型仿形加載機(jī)構(gòu)的研究,建立免耕播種機(jī)縱向鉛垂面微振動動態(tài)模型,優(yōu)化設(shè)計免耕播種機(jī)的結(jié)構(gòu),為控制免耕播種作業(yè)質(zhì)量和性能改進(jìn)奠定理論基礎(chǔ)。
1 2BG-2型玉米壟作免耕播種機(jī)簡介
2BG-2型玉米壟作免耕播種機(jī)總體結(jié)構(gòu),如圖1所示。整機(jī)由掛接機(jī)構(gòu)、四連桿機(jī)構(gòu)、破茬機(jī)構(gòu)、施肥機(jī)構(gòu)、播種機(jī)構(gòu)、壓種機(jī)構(gòu)、鎮(zhèn)壓機(jī)構(gòu)和機(jī)架等組成。整機(jī)長1 550 mm,工作幅寬1 300 mm(壟距600 mm),寬1 700 mm,質(zhì)量465 kg,播種兩行。配套動力:18.3 kW以上輪式拖拉機(jī)。2BG-2型玉米壟作免耕播種機(jī)結(jié)構(gòu)質(zhì)量為465 kg,與目前東北普遍使用的2BMZF-2型免耕指夾式精量施肥播種機(jī)采用1 000 kg的整機(jī)質(zhì)量相比[10-15],結(jié)構(gòu)質(zhì)量減少一半,在遼寧省各種土壤條件下進(jìn)行試驗,均可達(dá)到破茬、防堵、入土能力的要求。但是,2BG-2型機(jī)型采用滾動缺口單圓盤作為破茬裝置,開溝較窄,破茬刀阻力較大。為此研發(fā)了阿基米德螺線型破茬犁刀組成的切撥防堵裝置,以減小工作阻力,加大開溝寬度滿足農(nóng)業(yè)技術(shù)要求;并研發(fā)加裝彈簧和阻尼器復(fù)合體的新型仿形機(jī)構(gòu),保持整機(jī)對土壤的下壓力的需求。
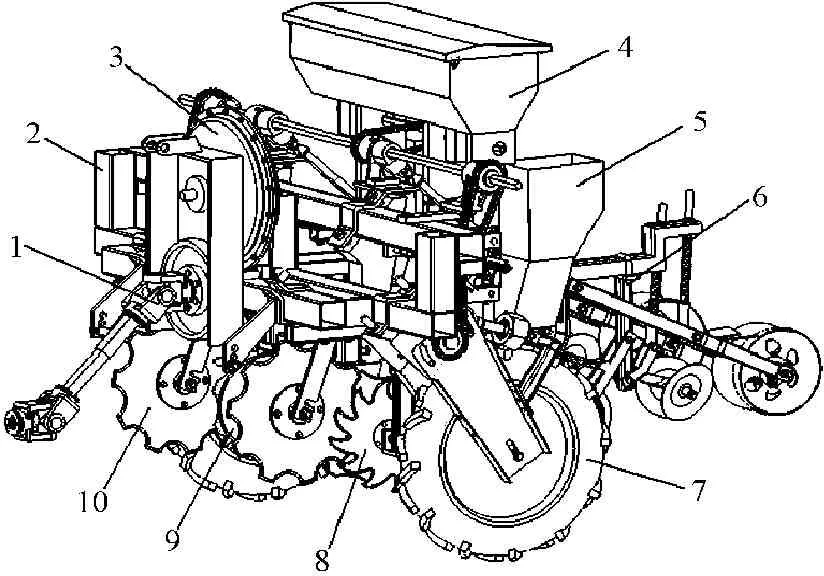
1.萬向節(jié);2.機(jī)架;3.風(fēng)機(jī);4.肥料箱;5.種箱;6.覆土鎮(zhèn)壓機(jī)構(gòu);7.地輪機(jī)構(gòu);8.切撥防堵裝置;9.雙圓盤施肥開溝器;10.破茬裝置
1.universal joint; 2.frame; 3.fan; 4.fertilizer box; 5.seed box; 6.soil covering and repression device; 7.land wheel mechanism; 8.anti-blocking; 9.double disc fertilizing furrow opener; 10.residue cutting device
圖1 2BG-2型玉米壟作免耕播種機(jī)總體結(jié)構(gòu)
Fig.1 General structure of type 2BG-2 corn ridge and no-till planter
2 免耕播種機(jī)的動態(tài)模擬
2.1 免耕播種機(jī)兩種不同仿形加載機(jī)構(gòu)
兩種仿形加載機(jī)構(gòu)結(jié)構(gòu)如圖2所示。2BG-2型玉米壟作免耕播種機(jī)改進(jìn)前的機(jī)構(gòu)是在四連桿機(jī)構(gòu)上安裝壓力彈簧,彈簧剛度系數(shù)為16 N·mm-1,通過絲杠調(diào)節(jié)來改變彈簧的工作長度,而改變其壓力大小。改進(jìn)后的機(jī)構(gòu)則是在四連桿機(jī)構(gòu)上加裝彈簧和阻尼器的復(fù)合體,彈簧剛度系數(shù)k約為20 N·mm-1。
田間試驗于2015年11月16日,在沈陽農(nóng)業(yè)大學(xué)試驗田玉米留茬地進(jìn)行,試驗地塊平均壟距為60 cm,壟高為7 cm,壟臺寬27 cm,溝底寬16 cm,平均株距為30 cm,玉米殘茬平均高度為15 cm,土壤平均含水率為16.5%,土壤緊實度15 cm處平均為1.97 MPa。由東方紅354型拖拉機(jī)懸掛連接,試驗裝置連接如圖3所示。為對比研究,將原仿形加載機(jī)構(gòu)和新型仿形加載機(jī)構(gòu)安裝在同一免耕播種機(jī)機(jī)架上[16]。
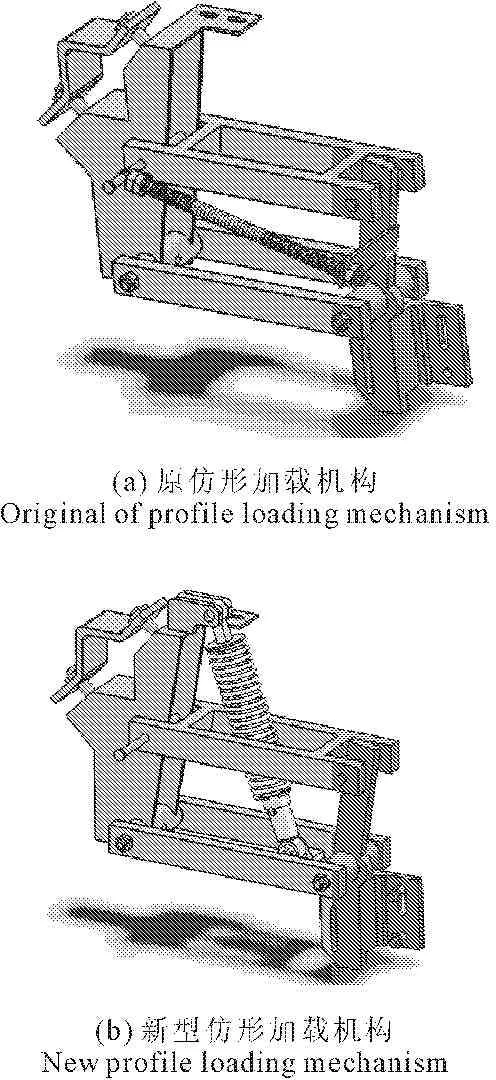
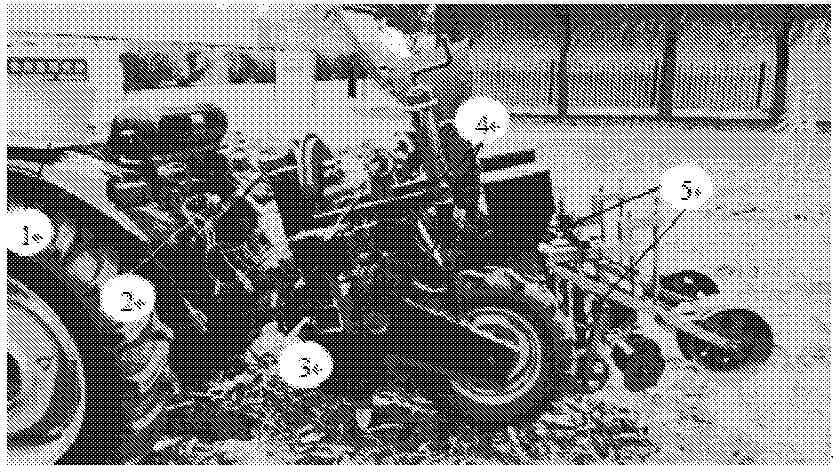
圖2 兩種仿形加載機(jī)構(gòu) Fig.2 Two kinds of profile loading mechanism
1.筆記本電腦;2.數(shù)據(jù)采集卡;3.蓄電池;4.傾角傳感器;5.直線位移傳感器
1.computer; 2.data acquisition; 3.storage battery; 4.angular displacement sensor; 5.linear displacement transducer
圖3 試驗裝置安裝圖
Fig.3 Completed installation of the tested apparatus
2.2 時域分析
安裝兩種不同仿形加載機(jī)構(gòu)的免耕播種單體,在5 km·h-1速度下的開溝深度變化和彈簧形變量的時間歷程曲線如圖4、圖5所示。
對圖4和圖5中2種情況下開溝深度和彈簧形變量的時域曲線數(shù)據(jù)進(jìn)行統(tǒng)計、計算和分析,得到試驗數(shù)據(jù)的統(tǒng)計結(jié)果如表1所示。

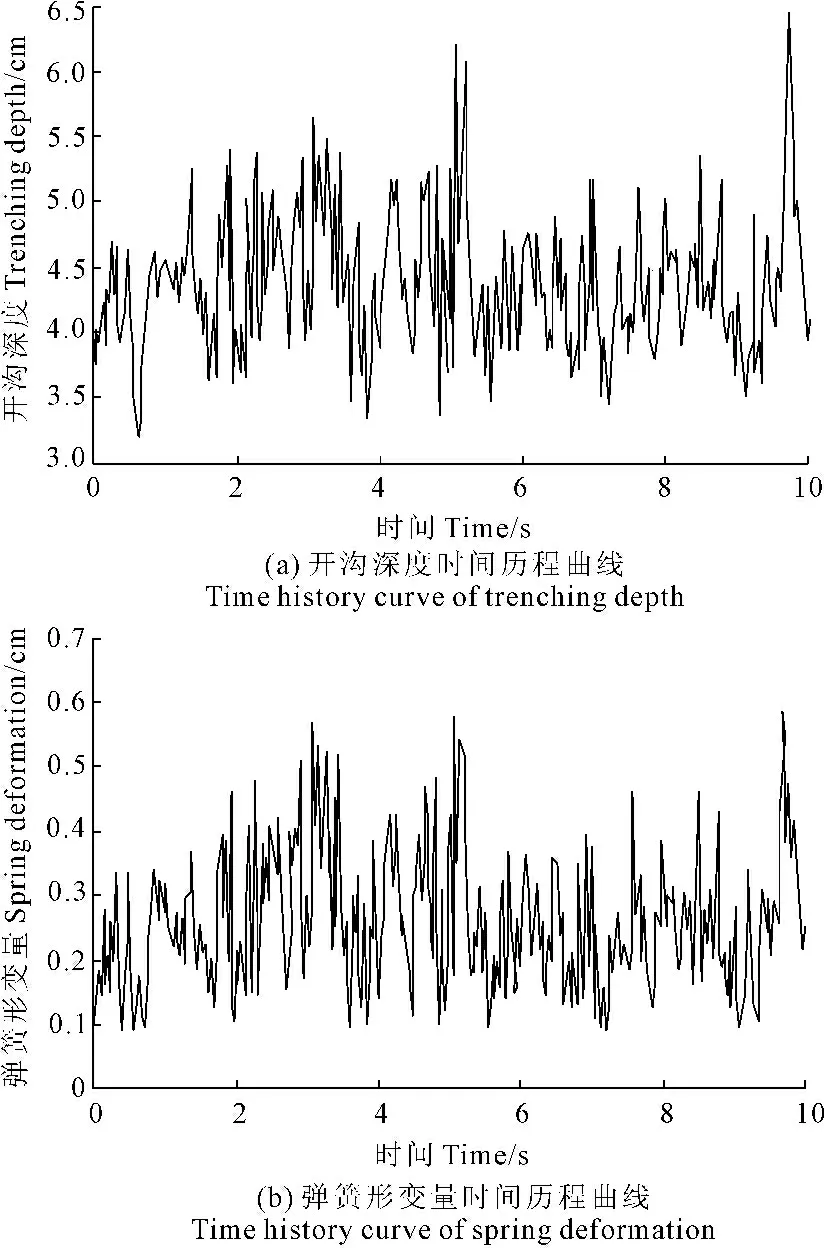
圖4 原仿形加載機(jī)構(gòu)開溝深度與彈簧形變量時間歷程曲線 Fig.4 Time course curve of trenching depth and spring deformation for original profile loading mechanism

圖5 新型仿形加載機(jī)構(gòu)開溝深度 與彈簧形變量時間歷程曲線 Fig.5 Time history curve of trenching depth and spring deformation for new profile loading mechanism表1 兩種不同仿形加載機(jī)構(gòu)試驗結(jié)果 Table 1 Test results of two kinds profile loading mechanism
由表1分析可得,新型仿形加載機(jī)構(gòu)的彈簧形變量與變異系數(shù)均較原仿形加載機(jī)構(gòu)的小,開溝深度的變異系數(shù)也較原仿形加載機(jī)構(gòu)的小,可見在田間作業(yè)時,安裝新型仿形加載機(jī)構(gòu)的免耕播種單體工作性能更穩(wěn)定,開溝深度的一致性得到保證,利于種子的發(fā)芽以及苗期生長。由不同工況下開溝深度和彈簧形變量的時間歷程曲線,可以求出信號的自相關(guān)函數(shù)以及兩個信號的互相關(guān)函數(shù)如圖6、圖7所示[17-18]。隨機(jī)信號在原點處有較大相關(guān)性,隨延遲時間的增長相關(guān)性變?nèi)酰€此后呈現(xiàn)出周期性,并且可以看到曲線相對于該軸衰減振動,曲線的這種歷程特性證明系統(tǒng)工作過程中具有隱匿的周期性分量。
2.3 譜密度分析
為了進(jìn)一步研究不同仿形加載機(jī)構(gòu)、不同作業(yè)速度下的田間工作性能,可對各參數(shù)的時間歷程曲線進(jìn)行譜密度分析。開溝深度作為輸入和彈簧形變量作為輸出的動態(tài)響應(yīng)自譜密度曲線如圖8、圖9所示。
由圖8分析可知,開溝深度、彈簧形變量自譜密度曲線以及開溝深度與彈簧形變量的互譜密度曲線相似,各峰值處對應(yīng)的頻率值基本一致。試驗用播種開溝器外徑為D=350 mm,轉(zhuǎn)動一周移動的距離為l=π×D=3.14×0.35≈1.1 m,機(jī)具的作業(yè)速度為1.38 m·s-1,則沿前進(jìn)速度方向上轉(zhuǎn)動一周所用的時間為t=1.1/1.38≈0.797 s,產(chǎn)生的振動頻率為1.35 Hz,則1點(1.35 Hz)處出現(xiàn)的峰值是播種開溝器振動引起的。同理可知:圖8中2點(8.26 Hz)處出現(xiàn)的峰值是由半圓缺口破茬盤振動引起的;圖8中3點處出現(xiàn)的峰值是由施肥開溝器振動引起的;圖8中4點處出現(xiàn)的峰值是由清壟器振動引起的。另外振動頻率在2 Hz與3 Hz處開溝深度、彈簧形變量自譜均出現(xiàn)過極值,應(yīng)該為地表不平度或者土壤非勻質(zhì)造成的土壤阻力波動引起的。比較輸入輸出自譜曲線可得,輸出的頻帶寬度較輸入的頻帶寬度大,說明系統(tǒng)不穩(wěn)定。
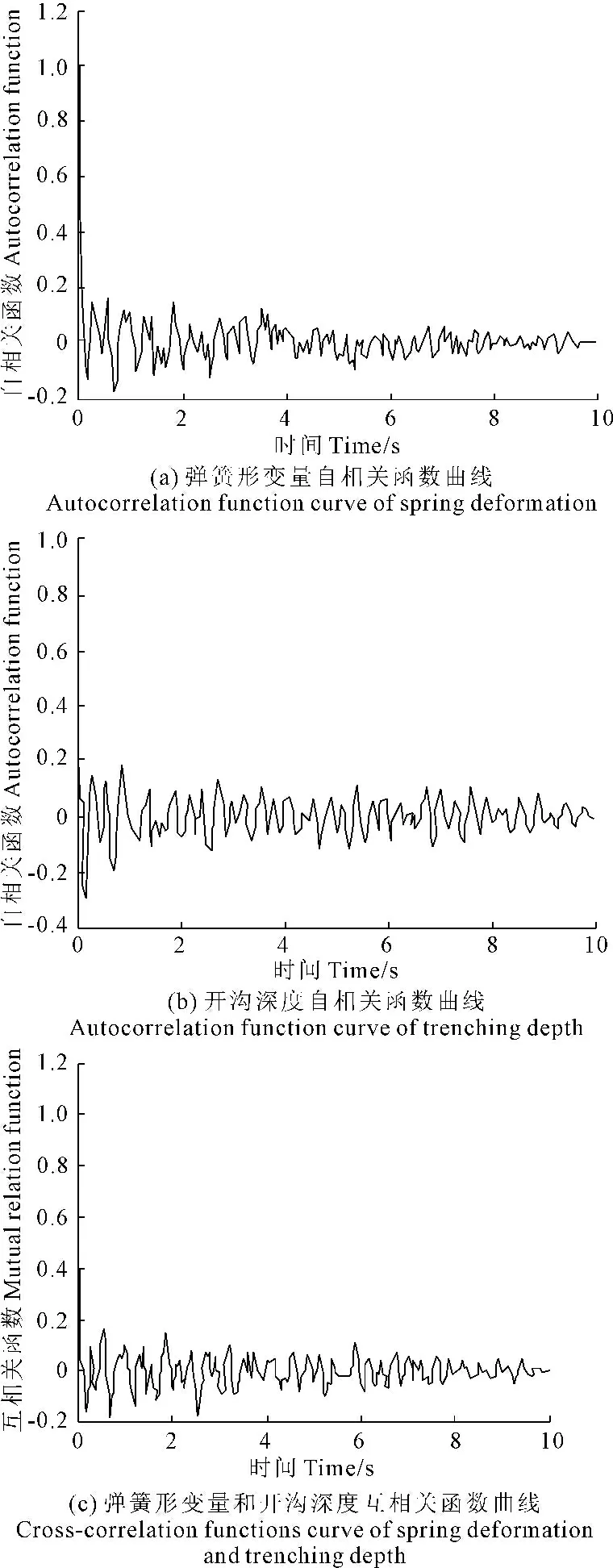
圖6 原仿形加載機(jī)構(gòu)的自相關(guān)與互相關(guān)函數(shù)曲線
Fig.6 Auto-and cross-correlation functions curve of original of profile loading mechanism
由圖9分析可知,開溝深度、彈簧形變量自譜密度曲線以及開溝深度與彈簧形變量的互譜密度曲線在1′、2′、3′和4′點處出現(xiàn)峰值原因同圖8中1、2、3和4處相同。振動頻率在0.67 Hz與1.67 Hz處開溝深度、彈簧形變量自譜曲線均出現(xiàn)過峰值,應(yīng)該是由地表不平度或者土壤非勻質(zhì)造成的土壤阻力波動引起的。由下文可知此時系統(tǒng)的固有頻率為3.57 Hz,則3.57 Hz處出現(xiàn)的峰值應(yīng)為系統(tǒng)固有頻率引起的。另外輸入、輸出自譜和互譜密度曲線相似,各峰值處對應(yīng)的頻率值基本一致,且輸出的頻帶寬度較輸入的頻帶寬度沒有加大,說明該動態(tài)系統(tǒng)比較穩(wěn)定,裝置結(jié)構(gòu)設(shè)計合理。
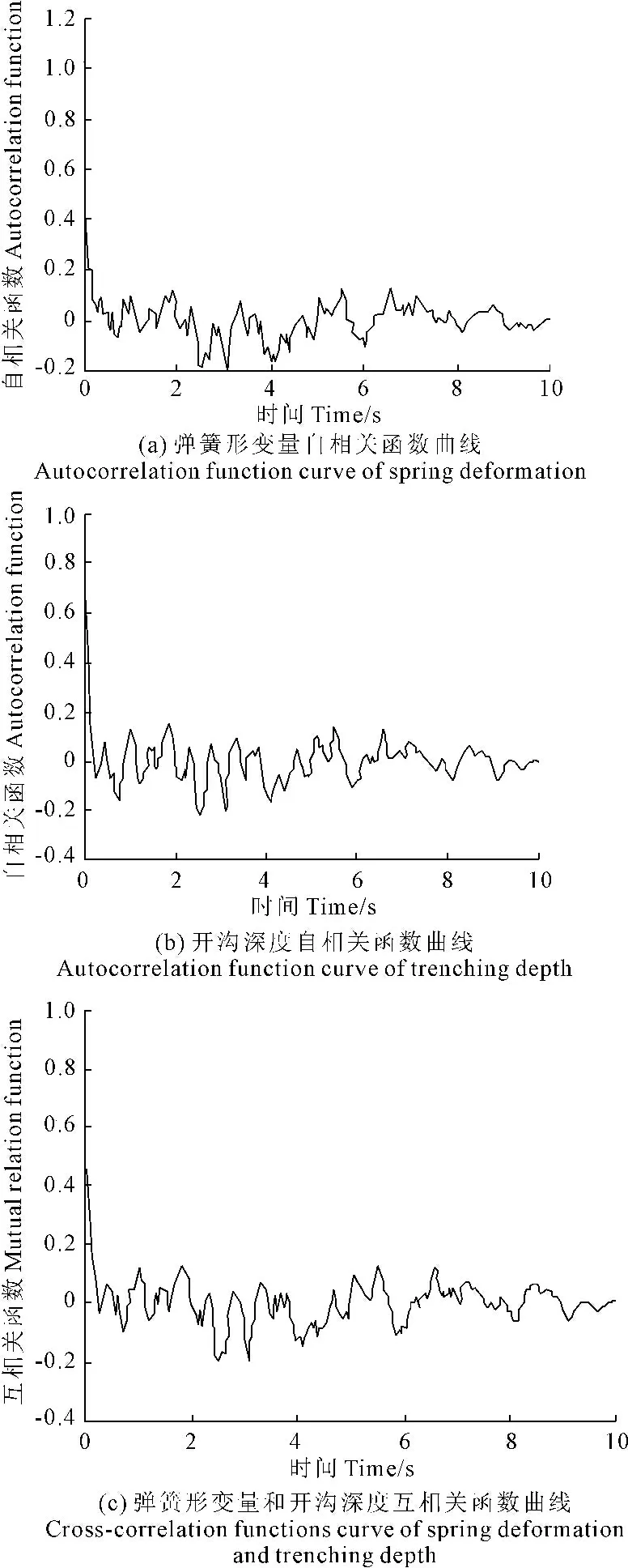
圖7 新型仿形加載機(jī)構(gòu)自相關(guān)與互相關(guān)函數(shù)曲線
Fig.7 Auto-and cross-correlation functions curve of new of profile loading mechanism
對比圖8和圖9可知,原仿形加載機(jī)構(gòu)的免耕播種單體的輸出頻帶主要集中在0~15 Hz,新型仿形加載機(jī)構(gòu)免耕播種單體的輸出頻帶約在0~6 Hz之間,說明田間作業(yè)時,輸入經(jīng)過新型仿形加載機(jī)構(gòu)后輸出信號的高頻成分被過濾掉,更利于免耕播種機(jī)系統(tǒng)的穩(wěn)定工作,新型仿形機(jī)構(gòu)設(shè)計合理。新型仿形加載機(jī)構(gòu)通過安裝輔助阻尼元件可以降低開溝器工作時的振動性能,利于保持播種深度的穩(wěn)定性。
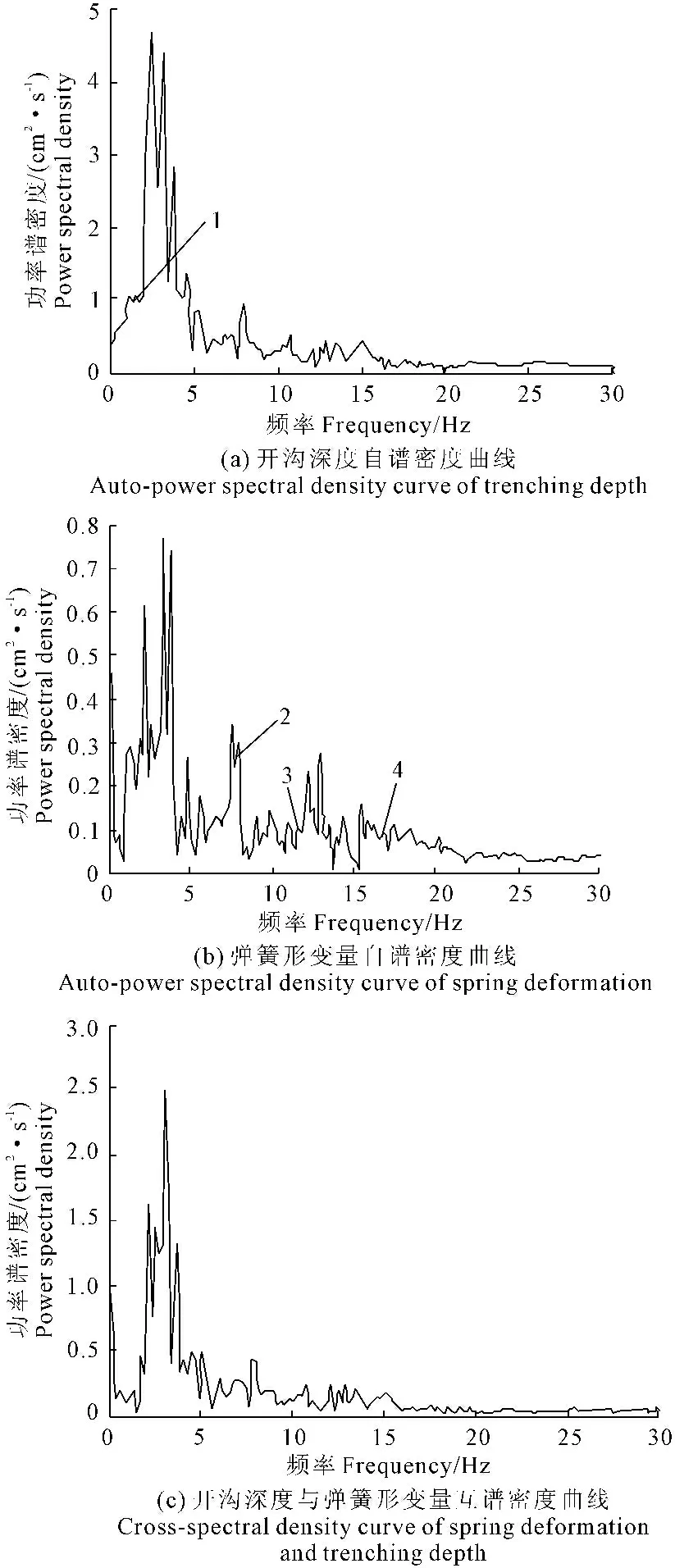
圖8 原仿形加載機(jī)構(gòu)開溝深度與彈簧形 變量功率譜密度曲線
Fig.8 Power spectral density curve of trenching depth and spring deformation for original profile loading mechanism
2.4 免耕播種傳遞函數(shù)的建立
免耕播種機(jī)械是較為復(fù)雜的動態(tài)系統(tǒng),根據(jù)免耕播種機(jī)系統(tǒng)正常工作時的動態(tài)運(yùn)動過程,以開溝深度x(t)作為輸入,彈簧形變量P(t)作為輸出的傳遞函數(shù)[19]:
(1)
式中,K—放大系數(shù);τ、T1、T2為時間常數(shù)。

圖9 新型仿形加載機(jī)構(gòu)開溝深度與彈簧形 變量功率譜密度曲線
Fig.9Powerspectraldensitycurveoftrenchingdepthandspringdeformationfornewprofileloadingmechanism
且有如下公式:
SPX(ω)=G(jω)SX(ω)
(2)
(3)
式中,SX(ω)為開溝深度和彈簧形變量的自譜密度;SPX(ω)為開溝深度和彈簧形變量的互譜密度;A(ω)為系統(tǒng)的幅頻特性;G(jω)為系統(tǒng)的頻率特性。
由圖7、圖8和圖9中確定輸入自譜密度SX(ω)、輸出自譜密度SP(ω)和互譜密度SPX(ω),得出不同工況下的A(ω)值。對于平穩(wěn)隨機(jī)過程,A(ω)又有如下表示形式:
(4)
式中,c1=T24,c2=T12-2T22,d=τ2。
可以由試驗結(jié)果計算出K,c1,c2,d,從而求出T1,T2,τ。計算結(jié)果如表2所示。

表2 開溝深度和彈簧形變量傳遞函數(shù)系數(shù)值Table 2 Stubble breaking depth and spring deformation transfer function coefficient value
由表2可知,在田間作業(yè)條件下,相對于原仿形加載機(jī)構(gòu)的單體而言,新型仿形加載機(jī)構(gòu)的播種單體開溝器的振動性能減小,提高了開溝深度的穩(wěn)定性,進(jìn)而改善了播種深度的穩(wěn)定性,證明新型仿形加載機(jī)構(gòu)的設(shè)計合理。
將表2中數(shù)據(jù)代入式(5)、式(6),可分別求得相同工況下,開溝深度作為輸入、彈簧形變量作為輸出的傳遞函數(shù)表達(dá)式。
原仿形加載機(jī)構(gòu)系統(tǒng)的傳遞函數(shù)(5km·h-1)為:
(5)
新型仿形加載機(jī)構(gòu)系統(tǒng)的傳遞函數(shù)(5 km·h-1)為:
(6)
2.5 基于Matlab/Simulink的免耕播種機(jī)系統(tǒng)單位階躍響應(yīng)分析
當(dāng)系統(tǒng)受到某種輸入作用后輸出變量的變化情況可以表征系統(tǒng)的性能。系統(tǒng)針對不同的輸入信號,響應(yīng)不同。外作用信號具有隨機(jī)性質(zhì),常采用一些典型信號作為系統(tǒng)的輸入,對免耕播種機(jī)系統(tǒng)良好的設(shè)計應(yīng)該是對系統(tǒng)輸入的瞬態(tài)響應(yīng)快速、穩(wěn)定、和準(zhǔn)確。本文討論系統(tǒng)在單位階躍函數(shù)作用下的瞬態(tài)響應(yīng)。系統(tǒng)實際輸出的單位階躍響應(yīng)曲線如圖10所示。
利用Matlab軟件中Simulink對免耕播種機(jī)動態(tài)系統(tǒng)進(jìn)行多域建模[20]。根據(jù)前面建立的加裝兩種不同仿形加載機(jī)構(gòu)的免耕播種系統(tǒng)(5km·h-1)的傳遞函數(shù)模型,打開SimulinkLibrary,設(shè)置好各模塊的屬性,正確連接各模塊,采用0.01s固定步長,搭建起系統(tǒng)的仿真模型,如圖11所示。然后運(yùn)行,獲得系統(tǒng)傳遞函數(shù)的單位階躍響應(yīng)曲線,如圖12所示。

注:tr-上升時間;tp-峰值時間;ts-響應(yīng)時間;MP-超調(diào)量;2σ-允許誤差。
Note:tr-rise time;tp-peak time;ts-response time;MP-overshoot volume;2σ-allowable deviation

圖10 二階系統(tǒng)單位階躍響應(yīng)曲線 Fig.10 Unit step response curve of second-order system
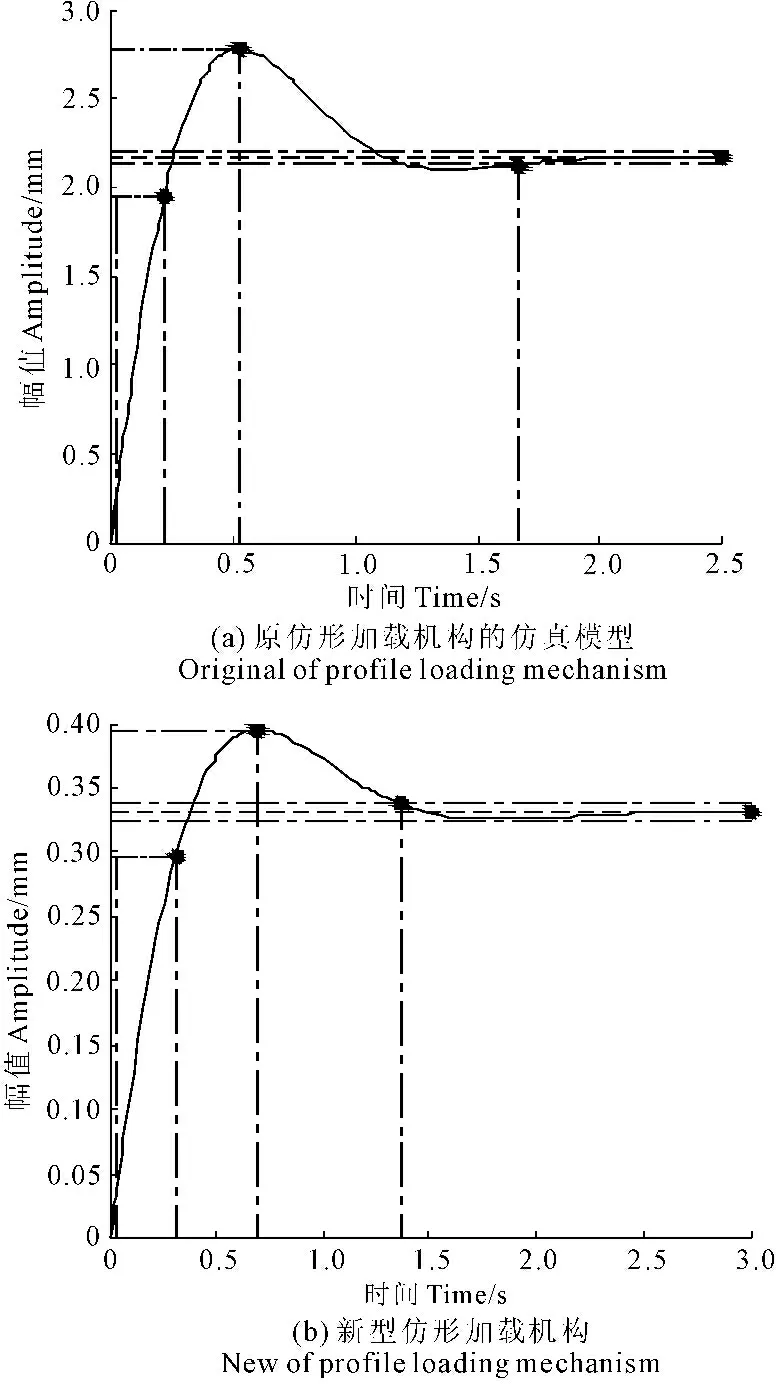
圖11 免耕播種機(jī)系統(tǒng)仿真模型 Fig.11 Simulation model of the system

圖12 系統(tǒng)傳遞函數(shù)的單位階躍響應(yīng)曲線 Fig.12 Unit step response curve of the transfer function of the system表3 開溝深度與彈簧形變量瞬態(tài)響應(yīng)性能指標(biāo) Table 3 Transient response performance index of trenching depth and spring length variation
由表3分析可知,新型仿形加裝機(jī)構(gòu)的免耕播種機(jī)系統(tǒng)與加裝原仿形加載機(jī)構(gòu)的免耕播種機(jī)系統(tǒng)相比,系統(tǒng)上升時間與峰值時間略微增加,但是系統(tǒng)響應(yīng)時間與最大超調(diào)量分別減少18%、32%,系統(tǒng)響應(yīng)震蕩弱,系統(tǒng)平穩(wěn)性好。
3 結(jié) 論
1) 通過對加裝兩種不同仿形加載機(jī)構(gòu)的免耕播種開溝深度和彈簧形變量時域分析,可得作業(yè)速度為5 km·h-1時,新型仿形加載機(jī)構(gòu)的彈簧形變量均值與變異系數(shù)分別為0.26 cm、38.5%,原仿形加載機(jī)構(gòu)的彈簧形變量均值與變異系數(shù)分別為0.32 cm、40.6%,利于免耕播種單體系統(tǒng)的穩(wěn)定工作。
2) 通過建立加裝新型仿形加載機(jī)構(gòu)免耕播種機(jī)的傳遞函數(shù),分析得到加裝新型形機(jī)構(gòu)的免耕播種機(jī)系統(tǒng)為欠阻尼衰減振動系統(tǒng),阻尼比為0.62,開溝深度穩(wěn)定性提高;系統(tǒng)響應(yīng)時間與最大超調(diào)量分別減少18%、32%,系統(tǒng)響應(yīng)震蕩弱,系統(tǒng)平穩(wěn)性好。
[1] 林 靜.農(nóng)田保護(hù)性耕作技術(shù)與機(jī)具[M].北京:金盾出版社,2016,3:118-262.
[2] 董 智,鄧林軍,董 俊,等.免耕農(nóng)業(yè)在遼西風(fēng)沙半干旱區(qū)的機(jī)遇與挑戰(zhàn)[J].遼寧農(nóng)業(yè)科學(xué),2016,(2):48-50.
[3] 王躍勇,王利斌,張維安,等.長春地區(qū)免耕播種機(jī)的現(xiàn)狀和建議[J].農(nóng)機(jī)化研究.2016,2:264-268.
[4] Magalhaes P S G, Bianchim A, Braunbeck O A. Simulated and experimental analyses of a toothed rolling coulter for cutting crop residues[J]. Biosystems Engineering, 2007,96(2):193-200.
[5] Gratton J, Chen Y, Tessier S. Pinciples of Farm Machineery. Design of a spring-loaded downforce system for a no-till seed opener[J]. Canadian Biosystem Engineering,2003,45(2):29-35.
[6] Mouazen A M, Anthonis J, Saeys W, et al. An automatic depth control system for on-line measurement of spatial variation in soil compaction, part 1: sensor design for measurement of frame height variation from soil surface[J]. Biosystems Engineering, 2004,89(2):139-150.
[7] Anthonis J, Mouazen A M, Saeys W, et al. An automatic depth control system for online measurement of spatial variation in soil compaction, part 3: design of depth control system[J]. Biosystems Engineering , 2004,89(1):59-67.
[8] 趙金輝,劉立晶,楊學(xué)軍,等.播種機(jī)開溝深度控制系統(tǒng)的設(shè)計與室內(nèi)試驗[J].農(nóng)業(yè)工程學(xué)報,2015,31(6):35-41.
[9] 黃東巖,朱龍圖,賈洪雷,等.基于壓電薄膜的免耕播種機(jī)播種深度控制系統(tǒng)[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2015,27(10):11-16.
[10] 王慶杰,何 進(jìn),梁忠輝,等.東北地區(qū)玉米壟作免耕播種機(jī)研究現(xiàn)狀[C]//中國農(nóng)業(yè)工程學(xué)會2011年學(xué)術(shù)年會.北京:中國農(nóng)業(yè)工程學(xué)會,2011.
[11] 林 靜,劉安東,李寶筏,等.2BG-2型玉米壟作免耕播種機(jī)[J].農(nóng)業(yè)機(jī)械學(xué)報,2011,42(6):43-46.
[12] Grisso R B, Holshouser D, Pitman R. Planter/drill considerations for conservation tillage systems[R]. Virginia: Virginia cooperative Extension,2007.
[13] 高煥文,李洪文,姚宗路.我國輕型免耕播種機(jī)研究[J].農(nóng)業(yè)機(jī)械學(xué)報,2008,39(4):78-82.
[14] 李宏哲,林 靜,李寶筏.免耕播種機(jī)在遼寧鐵嶺縣的適應(yīng)性研究[J].農(nóng)機(jī)化研究,2014,36(8):49-51.
[15] 李 博.免耕播種機(jī)新型破茬開溝裝置的設(shè)計與試驗研究[D].沈陽:沈陽農(nóng)業(yè)大學(xué),2013.
[16] 錢 巍.東北壟作免耕播種機(jī)關(guān)鍵部件研究與整機(jī)設(shè)計[D].沈陽:沈陽農(nóng)業(yè)大學(xué),2016.
[17] 楊叔子,楊克沖.機(jī)械工程控制基礎(chǔ)[M].武漢:華中理工大學(xué)出版社,1996.
[18] 盧文祥,杜潤生.工程測試與信息處理[M].武漢:華中理工大學(xué)出版社,1995.
[19] А.Б.盧里耶,А.А.格羅姆勃切夫斯基.農(nóng)業(yè)機(jī)械的設(shè)計和計算[M].北京:中國農(nóng)業(yè)機(jī)械出版社,1983.
[20] 趙廣元.MATLAB與控制系統(tǒng)仿真實踐[M].北京:北京航空航天大學(xué)出版社,2012:115-120.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)品鑒證.中國藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國藝術(shù)金融(2018年12期)2018-08-26 06:03:48