飛行器的故障診斷與控制
2018-03-20 09:10:02濱州學院電氣工程學院賈榮叢
電子世界 2018年4期
濱州學院電氣工程學院 賈榮叢 張 冉
0 引言
隨著航空飛行科技的日益壯大,各式各樣飛行器出現在人們的視野中,并且也變得越來越先進,系統構造復雜多樣,功能巨大且種類繁多,分系統、子系統反復交織,彼此耦合,尤其是一些成本很高并且執行特殊任務的航空航天器,其中大多數是有唯一性的,所以對各部分以及各子部分的穩定性要求更為苛刻,理論上不容許飛行器系統在運行期間呈現任何異常狀態。恰好是因為飛行器的高穩定性需求,使得對飛行器的故障進行診斷成為一個十分重要的研究課題。無論是在國內還是在國外,對于飛行器的故障診斷與控制的研究都是一項十分熱門的話題。飛行器在運行使用中的可靠性和安全性,將直接決定了其完成任務是否高效率,以及能否帶動相關產業的快速發展。
1 飛行器硬件設計
一個完整的四旋翼飛行器主要包括了以下幾個部分:電源部分、數據收集部分、四旋翼實驗平臺和實時控制軟件。四旋翼飛行器使用四個電動機作為飛行的動力,電動機對稱安裝在飛行器的前、后、左、右四個位置,每個電動機上都安裝了一個旋翼,旋翼處于相同的高度的平面上,且四個旋翼的構造和半徑都一樣,旋翼1和旋翼3逆時針轉動,旋翼2和旋翼4順時針轉動。四旋翼飛行器根據調整四個電動機的輸出電壓來改變旋翼轉動速度進而改變飛行器上升的力,控制飛行器的飛行狀況。因為飛行器是根據調整旋翼轉動速度改變升力的大小,這么做會導致其飛行力波動很大,因此要有一個可以長久保持穩定的控制方式。四旋翼飛行器只有四種飛行狀態的輸入,卻有六種飛行狀態的輸出。四旋翼飛行器的構造如圖1所示,電機1和電機3逆時針轉動的同時,電機2和電機4順時針轉動,所以當飛行器處于平衡狀態時,不存在陀螺效應和空氣動力扭矩效應。
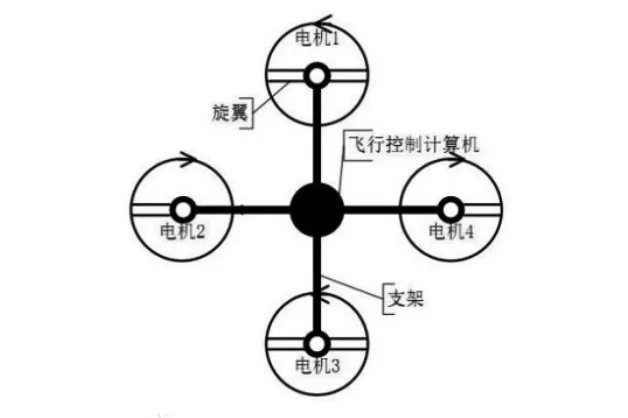
圖1 四旋翼飛行器結構示意圖
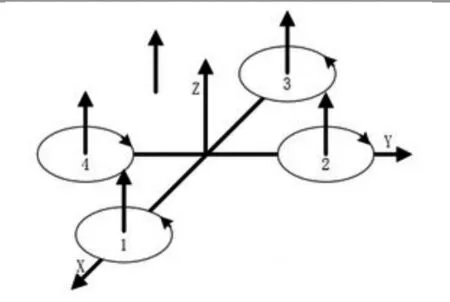
圖2 四旋翼飛行器垂直運動示意圖
2 四旋翼飛行器的飛行原理
四旋翼飛行器本身擁有兩組互相對稱的旋翼,四旋翼飛行器根據調整四個電動機的電壓來改變其轉動速度,圖2中,電機1和電機3進行逆時針轉動,電機2和電機4進行順時針轉動。規定沿x軸正方向稱為飛行器飛行的正方向,箭頭在旋翼的轉動平面的上面代表此電動機轉動速度增大,在下面代表此電動機轉動速度減小。
3 四旋翼飛行器的故障診斷
四旋翼飛行器的故障診斷方法如圖3所示:
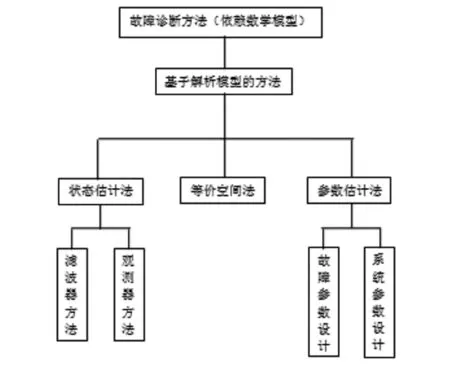
圖3 四旋翼飛行器的故障診斷方法
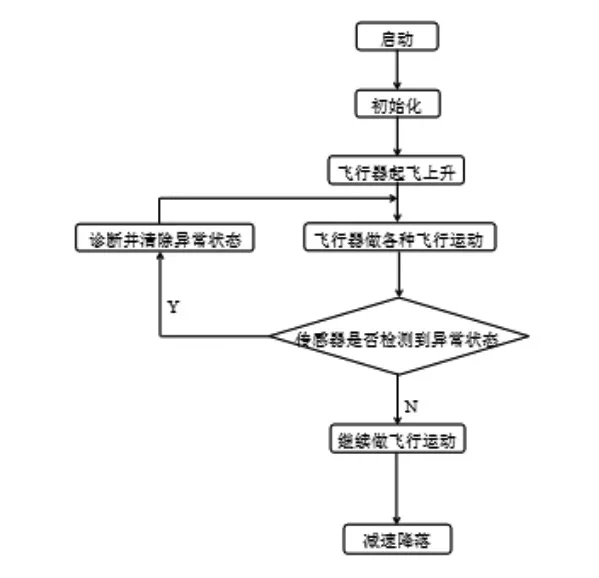
圖4 四旋翼飛行器故障診斷流程圖
4 四旋翼飛行器的定性模型
四旋翼飛行器是一種變量較多、耦合性高、不是線性系統的飛行機器,而且飛行器自身還有著質量、慣量等不能完全確定的的因素。針對這樣的并不簡單的系統,將飛行器的控制部分分解成內環和外環并且分開對兩部分進行研究,外環由水平控制部分和高度控制部分構成,內環則由飛行狀態控制模塊構成。控制流程圖如圖4所示。
5 結論
四旋翼飛行器的異常狀態取得的數據都是連續不斷的,進行整理后分析一系列趨向點,把趨向點與獲得的定性示意圖繪于整理成一個圖。利用每一個數據的定性示意圖與提取的趨向點作比較,不難發現,由定性仿真的方式分析的參數的變換與利用仿真獲得的圖像大致相同,vx、vy、vz與sx、sy、sz在每一個定性點和定性點之間的變換也較正確地反映了真正的四旋翼飛行器飛行運動的變換,定性仿真分析出的數據與定量仿真曲線整合的特性點大致相同。在定性仿真的計算中添加了模糊值后,可以更加精確的描繪狀態,從而能夠提高故障的識別率。
[1]胡錦添,舒懷林.基于PID神經網絡的四旋翼飛行器控制算法研究[J].自動化與信息工程,2015(1).
[2]王欣峰,任淑萍.基于LPC2138的四旋翼飛行控制器設計[J].工業控制計算機,2013(9).
[3]蘇哲宇.一種微小型四旋翼飛行器控制系統的設計與開發[D].南京:東北大學,2012.
[4]B.Rojas de Gáscue,J.L Prin,D.Guerra,C.Urbina de Navarro.Journal of Thermal Analysis and Calorimetry[M].2013,V ol.67(2),pp.343-347.
[5]曾勇.四旋翼飛行器容錯控制系統設計與實現[D].電子科技大學,2013.
猜你喜歡
《學習方法報》歷史中考版(2023年21期)2023-11-09 07:40:38
裝備制造技術(2020年3期)2020-12-25 05:22:30
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
當代貴州(2019年41期)2019-12-13 09:28:56
北京航空航天大學學報(2016年6期)2016-11-16 01:50:43
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
中國共青團(2015年7期)2015-12-17 01:24:38
中學生數理化·八年級物理人教版(2014年2期)2014-04-02 08:50:44
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31