一種AUV載荷分離過程實(shí)驗(yàn)研究與分析
2018-03-27 16:47:44付佳杰葉玉玲
艦船科學(xué)技術(shù) 2018年3期
付佳杰,葉玉玲
(中國船舶重工集團(tuán)公司第七一〇研究所,湖北 宜昌 443003)
0 引 言
自主式水下航行器(AUV)作為一種開發(fā)海洋、保衛(wèi)海洋的重要工具,無論是在民用還是在軍用上,都發(fā)揮著越來越大的作用[1–3]。近些年,AUV作為一種新型運(yùn)載體越來越廣泛用來攜帶、運(yùn)送、布放載荷。載荷可以是水下勘探設(shè)備、監(jiān)控設(shè)備、偵察設(shè)備。載荷的數(shù)量可以是單個(gè),也可以是多個(gè)。這種航行器是由載荷和運(yùn)載體組成的一個(gè)多體系統(tǒng)[4]。載荷作為航行器的一部分,其被釋放后,航行器一般會(huì)由于瞬間浮力發(fā)生變化而暫時(shí)失去平衡,嚴(yán)重時(shí),AUV甚至?xí)l(fā)生與載荷碰撞而失控的危險(xiǎn)。文獻(xiàn)[5–7]對AUV載荷分離方法和安全性進(jìn)行了一些理論研究和仿真分析,這些研究都是基于AUV運(yùn)載體與攜帶的載荷在同一軸線上的方式。本文介紹了一種AUV,其攜帶的載荷對稱布置在AUV兩側(cè)。對該型AUV的載荷分離過程作了簡單介紹,并主要針對AUV載荷分離過程的試驗(yàn)數(shù)據(jù)進(jìn)行分析。
1 AUV載荷布置及分離過程
1.1 AUV與攜帶載荷布置方案介紹
AUV攜帶載荷布置如圖1所示,該型AUV運(yùn)載體采用流線型外形設(shè)計(jì),攜帶的2個(gè)載荷均為負(fù)浮力(重力大于浮力)載荷,對稱布置在AUV中部兩側(cè)。為了減少航行阻力和方便攜帶,載荷外形通常做成圓柱流線形。分離裝置將載荷與AUV運(yùn)載體固連成一體,航行過程中起到攜帶載荷的作用,當(dāng)載荷與AUV分離時(shí)又起到了釋放載荷的作用。浮力調(diào)節(jié)裝置用來及時(shí)調(diào)整AUV在水下航行時(shí)因分離載荷引起的浮力變化。
1.2 AUV與載荷分離過程
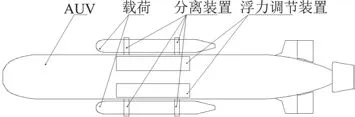
圖1 AUV攜帶載荷布置圖Fig.1 The layout of AUV and carrying loads
當(dāng)AUV攜帶載荷航行到達(dá)目標(biāo)區(qū)域時(shí),一側(cè)分離裝置解脫,該側(cè)載荷依靠自身重力與AUV分離,繼續(xù)航行至下一目標(biāo)區(qū)域時(shí),另一側(cè)分離裝置解脫,另一個(gè)載荷也依靠自身重力與AUV分離,至此,2個(gè)載荷完全實(shí)現(xiàn)與AUV分離。為了確保航行安全,通常AUV與載荷組成的多體系統(tǒng)在水下航行時(shí)調(diào)配成微正浮力[8],而載荷自身為負(fù)浮力,每次載荷分離后,運(yùn)載體的浮力將大于重力,如果沒有及時(shí)平衡這一變化,運(yùn)載體水下航行將會(huì)失去平衡,甚至浮出水面而暴露目標(biāo),這一點(diǎn)對軍用AUV尤為重要。鑒于此,AUV運(yùn)載體內(nèi)設(shè)有浮力調(diào)節(jié)裝置,在每次載荷分離后,觸發(fā)浮力調(diào)節(jié)裝置快速進(jìn)水,來平衡載荷分離后的重量變化。浮力調(diào)節(jié)具體過程可參見文獻(xiàn)[9]。
2 AUV載荷分離實(shí)驗(yàn)數(shù)據(jù)分析
為了充分驗(yàn)證該AUV載荷分離方法的可行性,將AUV分別攜帶2種不同重量的載荷在海上進(jìn)行實(shí)際航行實(shí)驗(yàn),航行過程中的數(shù)據(jù)實(shí)時(shí)記錄在AUV中央控制單元內(nèi)部,實(shí)驗(yàn)結(jié)束后下載內(nèi)計(jì)數(shù)據(jù),并對AUV航行姿態(tài)主要參數(shù)進(jìn)行分析。
2.1 載荷負(fù)浮力為150 kg時(shí)分離過程AUV航行姿態(tài)分析
實(shí)驗(yàn)工況1:AUV攜帶2個(gè)載荷水中重量均為150 kg,在水下30 m深以1 m/s的速度直線航行,在每次載荷分離后分別控制浮力調(diào)節(jié)裝置進(jìn)水150 kg。將載荷分離前后時(shí)刻的AUV航行姿態(tài)主要參數(shù)整理成圖2所示,其中圖2(a)是載荷分離前后AUV航行深度隨時(shí)間變化曲線;圖2(b)是載荷分離前后AUV航速隨時(shí)間的變化曲線;圖2(c)是載荷分離前后AUV航行俯仰角隨時(shí)間的變化曲線;圖2(d)是載荷分離前后AUV航行橫滾角隨時(shí)間的變化曲線。
從圖2可以看出,AUV在水下30 m深度以1 m/s速度航行至10 420 s左右時(shí)釋放第1個(gè)載荷,由于釋放載荷后AUV重力小于浮力,AUV先小幅上浮至30.7 m,通過自身浮力調(diào)節(jié)裝置和舵機(jī)控制,航行深度小幅震蕩后又恢復(fù)到30 m左右;第1個(gè)載荷分離前,AUV航行時(shí)橫滾角在1.1°左右往復(fù)震蕩,俯仰角在–2.5°上下輕微波動(dòng)。由于第1個(gè)載荷位于AUV的右側(cè),其分離后,橫滾角迅速變成在–2.3°左右震蕩;俯仰角先降至–5°左右,又恢復(fù)至–2.3°左右。AUV繼 續(xù)航行至10 520 s左右時(shí),位于AUV左側(cè)的第2個(gè)載荷分離,橫滾角迅速變成在1.2°左右震蕩,俯仰角經(jīng)過小幅波動(dòng)后又恢復(fù)至–2.2°左右。可見,2個(gè)載荷全部分離后,AUV的航行深度、速度、俯仰角和橫滾角又基本恢復(fù)到了載荷分離前的狀態(tài)。

圖2 載荷負(fù)浮力為150 kg時(shí)分離前后AUV航行姿態(tài)參數(shù)曲線Fig.2 AUV navigation attitude parameter curves of before and after separation while carrying the loads negative buoyancy as 150 kg
2.2 載荷負(fù)浮力為300 kg時(shí)分離過程AUV航行姿態(tài)分析
實(shí)驗(yàn)工況2:AUV攜帶2個(gè)載荷水中重量均為300 kg,在水下30 m深以1 m/s的速度直線航行,在每次載荷分離后分別控制浮力調(diào)節(jié)裝置進(jìn)水300 kg。將載荷分離前后時(shí)刻的AUV航行姿態(tài)主要參數(shù)整理成圖3所示,其中圖3(a)是載荷分離前后AUV航行深度隨時(shí)間變化曲線;圖3(b)是載荷分離前后AUV航速隨時(shí)間的變化曲線;圖3(c)是載荷分離前后AUV航行俯仰角隨時(shí)間的變化曲線;圖3(d)是載荷分離前后AUV航行橫滾角隨時(shí)間的變化曲線。
從圖3可以看出,AUV在水下30.5 m左右深度以1 m/s速度航行,載荷分離前,AUV航行橫滾角在–0.5°~1.5°之間左右往復(fù)擺動(dòng),俯仰角在–1.7°左右上下波動(dòng)。AUV航行至33 030 s左右時(shí)釋放第1個(gè)載荷,由于第1個(gè)載荷位于AUV的右側(cè),其分離后,橫滾角迅速變成在–4.8°左右震蕩;俯仰角先降至–2.9°左右,又恢復(fù)至–1.7°左右。AUV繼續(xù)航行至33 240 s左右時(shí),位于AUV左側(cè)的第2個(gè)載荷分離,橫滾角由–4.8°迅速變成在0.3°左右震蕩,俯仰角經(jīng)過小幅波動(dòng)后又恢復(fù)至–1.7°左右。可見,2個(gè)載荷分離后,AUV的航行深度、速度、俯仰角和橫滾角又恢復(fù)到了載荷分離前的狀態(tài)。
該布置方案中,載荷位于AUV運(yùn)載體的中間兩側(cè)位置,載荷軸向重心基本位于AUV的軸向中間位置,而載荷縱向重心與AUV中間位置有一定的偏距,載荷分離前后對AUV航行俯仰角改變不大,對AUV航行橫滾角影響較明顯,從圖2和圖3中也可看出載荷分離前后對AUV航行橫滾角的影響比對AUV航行俯仰角影響大。另外對比圖2和圖3還可看出,載荷在水中重量越大,第1個(gè)載荷分離后AUV的橫滾角變化也越大。
3 結(jié) 語
本為介紹了一種AUV左右兩側(cè)對稱攜帶載荷布置方法,對AUV與載荷分離過程方案做了簡單說明,通過對AUV攜帶載荷航行實(shí)驗(yàn)數(shù)據(jù)分析,驗(yàn)證了采用該布置方案,載荷分離可靠,且載荷分離前后對AUV水中航行姿態(tài)影響不大;同時(shí),攜帶載荷水中重量越大,載荷分離對AUV水中航行狀態(tài),尤其是橫滾角影響越大。
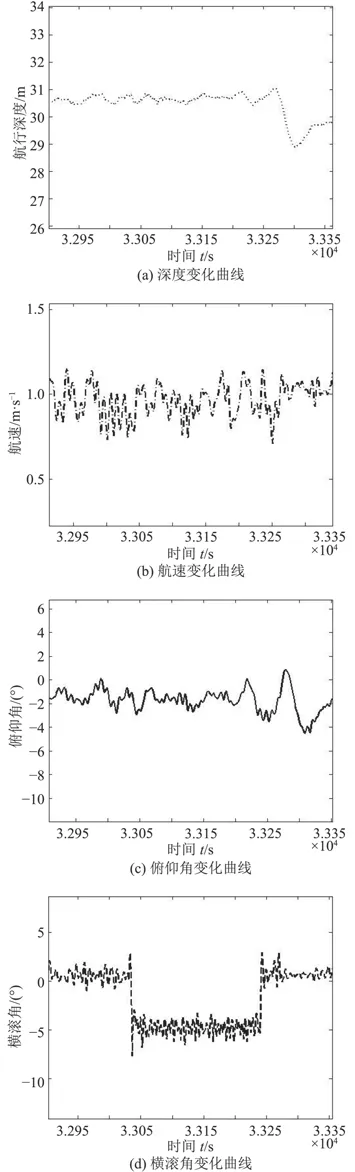
圖3 載荷負(fù)浮力為300 kg時(shí)分離前后AUV航行姿態(tài)參數(shù)曲線Fig.3 AUV navigation attitude parameter curves of before and after separation while carrying the loads negative buoyancy as 300 kg
[1]陳強(qiáng), 張林根.美國軍用UUV現(xiàn)狀及發(fā)展趨勢分析[J].艦船科學(xué)技術(shù), 2010, 32(7): 129–134.CHEN Qiang, ZHANG Lin-gen.Analysis of current situational development trend of US military UUV [J].Ship Science and Tecnology, 2010, 32(7): 129–134.
[2]郭鳳水, 袁思鳴, 劉強(qiáng).軍用UUV使命任務(wù)和裝備性能分析[J].中國艦船研究, 2007, 2(5): 76–80.GUO Feng-shui, YUAN Si-ming, LIU Qiang.Development of unmanned underwater vehicle—their missions and capabilities[J].Chinese Journal of Ship Research, 2007, 2(5): 76–80.
[3]陳強(qiáng), 蘭曉娟, 王霜.國外UUV系統(tǒng)在海洋調(diào)查中的應(yīng)用 [J].艦船科學(xué)技術(shù), 2012, 34(10): 133–136.CHEN Qiang, LAN Xiao-juan, WANG Shuang.Applications of foreign unmanned underwater vehicles in oceanographic survey[J].Ship Science and Tecnology, 2012, 34(10): 133–136.
[4]潘瑛, 徐德民, 宋保維, 等.AUV水下分離運(yùn)動(dòng)及分離方式研究 [J].西北工業(yè)大學(xué)學(xué)報(bào), 2004, 22(4): 505–509.PAN Ying, XU De-min, SONG Bao-wei, et al.On the kinematics and mode selection for separation motion of AUV[J].Journal of Northwestern Ploytecnical University, 2004,22(4): 505–509.
[5]潘光, 魏靜, 陳誠.載荷AUV進(jìn)水過程分析及分離運(yùn)動(dòng)仿真[J].西北工業(yè)大學(xué)學(xué)報(bào), 2014, 32(4): 576–580.PAN Guang, WEI Jing, CHEN Cheng.Water injection analysis and separation motion simulation of AUV with payload [J].Journal of Northwestern Ploytecnical University, 2014, 32(4):576–580.
[6]宋保維, 趙娥, 李家旺.AUV載荷分離方法及安全性研究 [J].計(jì)算機(jī)仿真, 2009, 26(1): 174–177.SONG Bao-wei, ZHAO E, LI Jia-wang.Method and safty of load separation of AUV [J].Computer Simulation, 2009, 26(1):174–177.
[7]余德海, 潘光, 邵成, 等.AUV載荷分離運(yùn)動(dòng)仿真研究[J].彈箭與制導(dǎo)學(xué)報(bào), 2006, 26(2): 625–627.YU De-hai, PAN Guang, SHAO Cheng, et al.Simulation of AUV's load separation [J].Journal of Projectiles, Rockets, 2006,26(2): 625–627.
[8]鄭榮, 常海龍.浮力調(diào)節(jié)系統(tǒng)在作業(yè)型AUV上的應(yīng)用研究[J].微計(jì)算機(jī)信息, 2006, 22(6): 207–209.ZHENG Rong, CHANG Hai-long.Applied research of the buoyancy regulating system on work AUV [J].Control and Automation, 2006, 22(6): 207–209.
[9]付佳杰, 胡玉梅, 楊海鵬, 等.水下彈簧活塞式浮力補(bǔ)償裝置:中國, CN201410509841.5[P].2015–03-25.FU Jia-jie, HU Yu-mei, YANG Hai-peng, et al.Underwater spring piston buoyancy compensation device [P]: Chinese patent, CN201410509841.5.2015–03-25.