車聯網中基于模糊邏輯處理的多跳廣播協議
2018-03-29 08:26:09廖恩瑞潘燕燕
網絡安全與數據管理 2018年2期
廖恩瑞,潘燕燕,宋 祥
(1.福州大學 數學與計算機科學學院,福建 福州 350108;2.福州大學 福建省網絡計算與智能信息處理重點實驗室,福建 福州 350108)
0 引言
近年來車聯網通信引起了國內外研究人員的廣泛關注,而其中較為重要的研究應用領域之一就是告警消息的廣播。真實的車聯網中,車輛的快速移動等特性產生大量失真數據,已有的協議都是在默認接收的數據為真的情況下進行轉發決策,忽略了失真數據對于協議性能的影響。因此,廣播協議的容錯能力逐漸成為衡量車聯網服務性能的一個重要指標,它體現了該協議在數據失真的情況下是否能依然保有較高的效率和性能。針對該問題本文提出了針對高速公路環境下一種基于模糊控制的廣播協議MBOF(Multi-Hop Broadcast Protocol in VANET Based on Fuzzy Logic Approach)。在選擇轉發中繼節點時,采用模糊邏輯[1]評估候選中繼節點。模糊邏輯處理能容忍輸入參數的不準確,且更具擴展性與靈活性,能更好地適應拓撲結構易變的車聯網。
1 相關工作
國內外關于多跳廣播協議的研究層出不窮,文獻[2]和文獻[3]為了改善數據傳輸的可擴展性,分別提出了基于鄰居節點位置信息,輔助相鄰車輛做轉發數據信息的協議。文獻[4]提出了基于車聯網的安全數據優先權傳播協議 PVCast,有效地避免了依賴目的節點數據的問題。文獻[5]提出了基于計數的廣播協議CBD,為每一個節點設定等待時間和重復數據包閾值,等待時間內收到的數據包未達到閾值則進行廣播操作。文獻[6]提出了多跳廣播協議的轉發節點選擇算法FLFNS,該協議采用模糊處理從距離、移動性和信號強度3個維度分析數據,提高決策準確率。文獻[7]提出基于模糊選擇的路由協議,通過節點的速度、丟失率和時延來決定中繼節點的選擇。
2 網絡模型和問題描述
本文假設車聯網是由隨機分布在一段長方形平面上的車輛節點V={v1,v2,…,vn}組成,節點v0為觸發告警信息的源節點。網絡模型可抽象描述成一個無向圖G=(V,E),其中V表示車輛節點集合,E表示鏈路集。
2.1 問題描述

2.2 相關概念


定義3 興趣范圍ROI:以生成告警消息的源節點為圓心,該告警消息對所有覆蓋在半徑ROI的車輛都有價值。
定義4 鄰居節點集CV:車輛節點v的鄰居節點集,R為標準車輛通信范圍。
CV={vi|vi∈V&&xvi≤xvt&&dvivt≤R}
(1)
3 算法
MBOF算法由定向傳輸和有效傳輸機制組成。以下介紹本文提出的廣播算法的兩個過程,分別為定向傳輸和候補轉發機制,具體描述過程如下。
3.1 定向傳輸
當節點第一次接收到告警消息時,首先解析該消息,如果下一跳中繼節點信息與自己匹配,節點即獲得廣播權限,然后依據獲取的信標信息計算鄰居節點的可靠因子、實時因子、路況因子來評估鄰居節點,選擇出中繼節點和候補節點,將該信息更新入告警消息,廣播該消息。中繼節點選擇過程可分為計算輸入值、模糊化計算、規則匹配和精確化計算4個子過程。
(1)計算輸入值
模糊邏輯計算過程包含3個輸入值:可靠因子、實時因子和路況因子。
①可靠因子
采用文獻[8]使用的Rayleigh衰減模型模擬交通環境的無線信號,為了實現告警消息在距離為d的兩車輛之間以低于PTh的概率被成功傳輸,則消息發送者對應的無線信號發射功率必須滿足式(2):
(2)
式中參數名稱與數據值均可由各個車輛資料數據獲得。可靠因子MP(i)的計算公式如下:
(3)
②實時因子
傳輸時延Ttrs由回退延遲Tback和消息傳輸數據的時間Tdata組成,即Ttrs=Tback+Tdata。采用文獻[9]無線信道碰撞概率的閉合表達式來計算消息傳輸重傳平均次數。E(Nr)為重傳次數Nr的均值,wmin代表最小競爭窗口,lre代表重傳次數的上限,η表示回退時的單位時隙長度,L表示數據包大小,M表示傳輸率,回退延遲Tback及消息傳輸時間Tdata的計算如式(4)、式(5)所示。
Tback=
(4)
(5)
m為最大重傳次數,用Dtmax表示車聯網中允許的最大傳輸延遲,由兩倍歷史最大時延獲得,實時因子MT(i)的計算公式如下:
(6)
③路況因子
在選擇中繼轉發節點時,路況信息是很重要的影響因子,如車輛節點的方向、車速、與源車輛節點的距離等。文獻[6]中為了計算路況因子,先計算平均距離dave,如式(7)所示:
(7)
|CVv0|為鄰居節點集CVv0的個數。則路況因子MD反應了鄰居節點的運動情況,在時刻t,節點vk的路況因子MD計算公式如下:
(8)
其中,h0、hk分別表示廣播節點v0與節點vk的速度。
(2)模糊化計算
模糊集的隸屬度函數[10]是模糊化設計的一個重要組成部分。本小節采用函數表示法,3個輸入變量的隸屬度函數和輸出變量FitData的隸屬度函數如圖1所示。
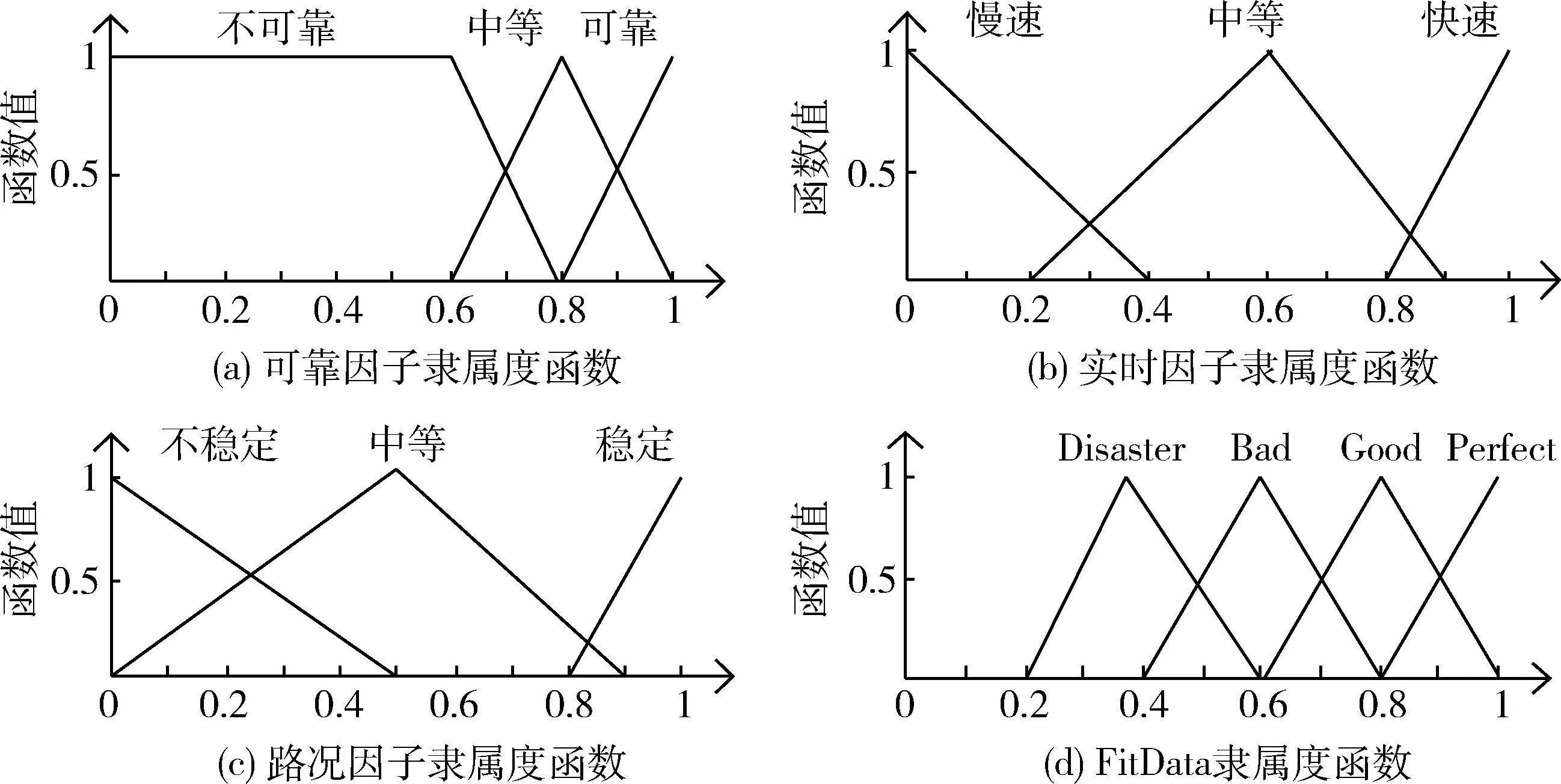
圖1 輸入/輸出變量的隸屬度函數
(3)規則匹配
模糊控制器的中心工作是依據語言規則進行模糊推理,模糊推理則依據模糊控制規則庫。規則庫見表1,采用IF/THEN規則[11],輸出變量為FitData。

表1 規則庫
(4)精確化計算(去模糊化)
為了得到確切的輸出值,就必須對模糊推理獲得的模糊輸出量進行轉換,這個過程就是精確化計算。采用Mamdani重心法[12]實現去模糊化,由輸入值經過對應隸屬度函數獲得對應輸出值,將其與輸出變量隸屬度函數所形成的陰影部分重心點的橫坐標作為去模糊化后的值。
3.2 候補轉發機制
即便采用模糊邏輯選擇的中繼節點具備良好的健壯性,也難免會有突發故障等原因導致告警消息的丟失,因此算法采用候補轉發機制來降低數據包丟失率。如圖2所示,車輛v0發生事故,向后發出告警消息,v1,v2分別是中繼節點和候補節點,v1肩負起轉發告警信息的重任,v2則在時間閾值內監聽,若收到重復消息則放棄轉發,否則v2接手v1成為轉發中繼節點。
3.3 算法實現
節點廣播告警消息過程偽代碼如下:
(1)當節點v第一次收到告警消息WM時,解析告警消息WM,若v為源節點或中繼節點,跳轉至步驟(3);若為候補節點,跳轉至步驟(2);否則丟棄告警消息。
(2)節點v進入候補狀態,在時間閾值T內檢測收到的消息數量,若接收到與告警消息WM相同的消息達到閾值,則丟棄告警消息WM,否則轉至步驟(3)。
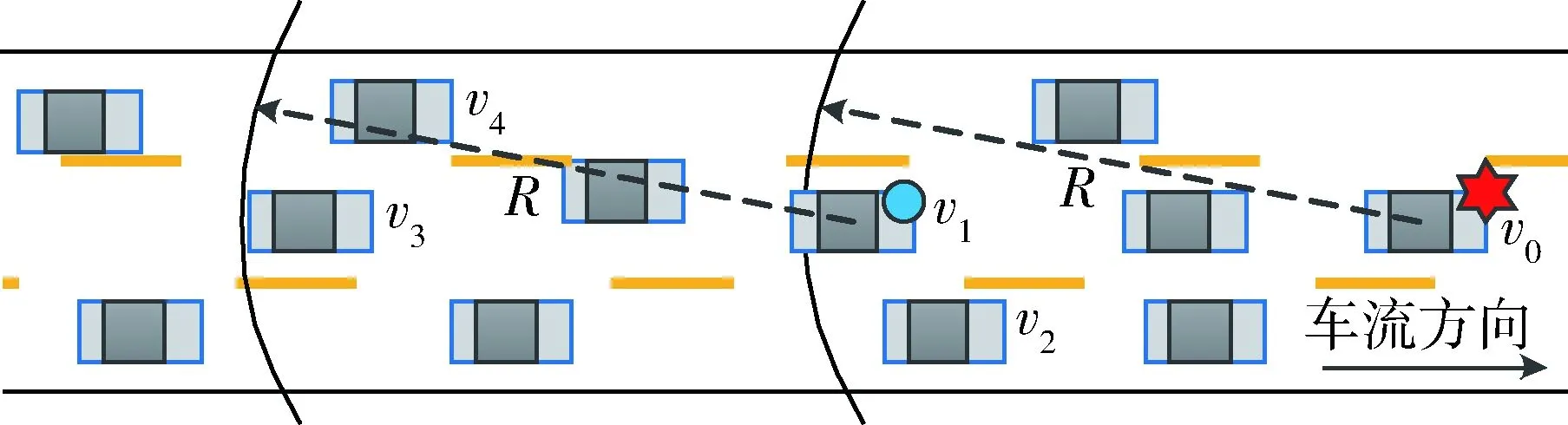
圖2 廣播示意圖
(3)根據通信覆蓋半徑R計算節點v的鄰居節點集CV,通過接收的信標消息獲取鄰居節點的信息數據,遍歷鄰居節點CV,計算節點的FitData值。
(4)對于節點集CV中的任意節點,首先計算3個輸入值,即可靠因子MP、實時因子MT以及計算路況因子MD。
(5)接著根據對應的隸屬度函數進行模糊化處理,查詢規則庫進行規則匹配,最后采用Mamdani重心法精確化計算。
(6)比較各個節點精確化后的FitData值,選出最大值的結果對應的節點為中繼節點,次大值為候補節點。將信息更新入告警WM,轉發新的告警消息WM。
(7)告警消息WM覆蓋整個興趣范圍ROI,算法終止。
4 實驗
4.1 仿真實驗場景
本文采用MATLAB作為實驗仿真工具,建立一個200 m×3 m的矩形道路區域,生成一個單向三車道交通路段,實驗模擬區間為[40,200]。實驗參數及其取值如表2所示。

表2 仿真參數及預設值
車輛節點vi的信標數據Xi自動生成,包含節點位置、接收到告警信息的時間、車速等信息。失真數據則對真實數據Xi做部分修改。車輛節點u與v之間的鏈路l=(u,v)∈E,值的大小與節點距離duv有關,這里采用正比例函數來量化鏈路值。
4.2 性能指標
(9)
在相同仿真環境下,將MBOF協議與CBD、PVCast和FLFNS 3個協議作比較,除了比較容錯能力外,同時也比較數據傳輸時延。
4.3 結果分析
(1)容錯能力比較
CBD、PVCast、FLFNS和MBOF 4個協議容錯能力系數FTA隨節點數變化的變動情況如圖3所示。從圖中可以看出,誤差數據對于MBOF協議幾乎沒有影響,而其他協議結果差異相對較大,其中PVCast協議容錯能力最不理想。當車輛節點從160增至200時,MBOF的容錯能力系數FTA變化幾乎為0,而CBD協議容錯能力系數FTA的值從0.014 5增加到0.076 3;PVCast協議從0.31增加到1;FLFNS協議從0.19增加到0.37。可見MBOF在協議的容錯能力上優于CBD、PVCast和FLFNS協議。
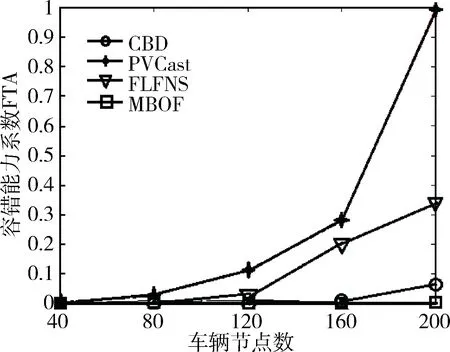
圖3 容錯能力仿真結果
(2)傳輸時延比較
CBD、PVCast、FLFNS和MBOF 4個協議端到端的數據傳輸時延隨節點數的變化情況如圖4所示。4個協議的傳輸時延隨節點數的上升而增大,當節點數低于80時,變化差異不大。隨著節點數的增加,CBD、PVCast和FLFNS協議傳輸時延變化明顯,而MBOF協議傳輸時延則上升緩慢。當車輛節點數從120增加到200時,MBOF協議的傳輸時延從0.34 ms增加到1.05 ms,相差0.69 ms;CBD協議的傳輸時延從2.53 ms增加到12.13 ms,相差9.6 ms;PVCast協議傳輸時延從1.19 ms增加到7.72 ms,相差6.53 ms;FLFNS則從2.14 ms增加到6.91 ms,相差4.75 ms。可見MBOF在傳輸時延上優于其他協議且相對穩定。
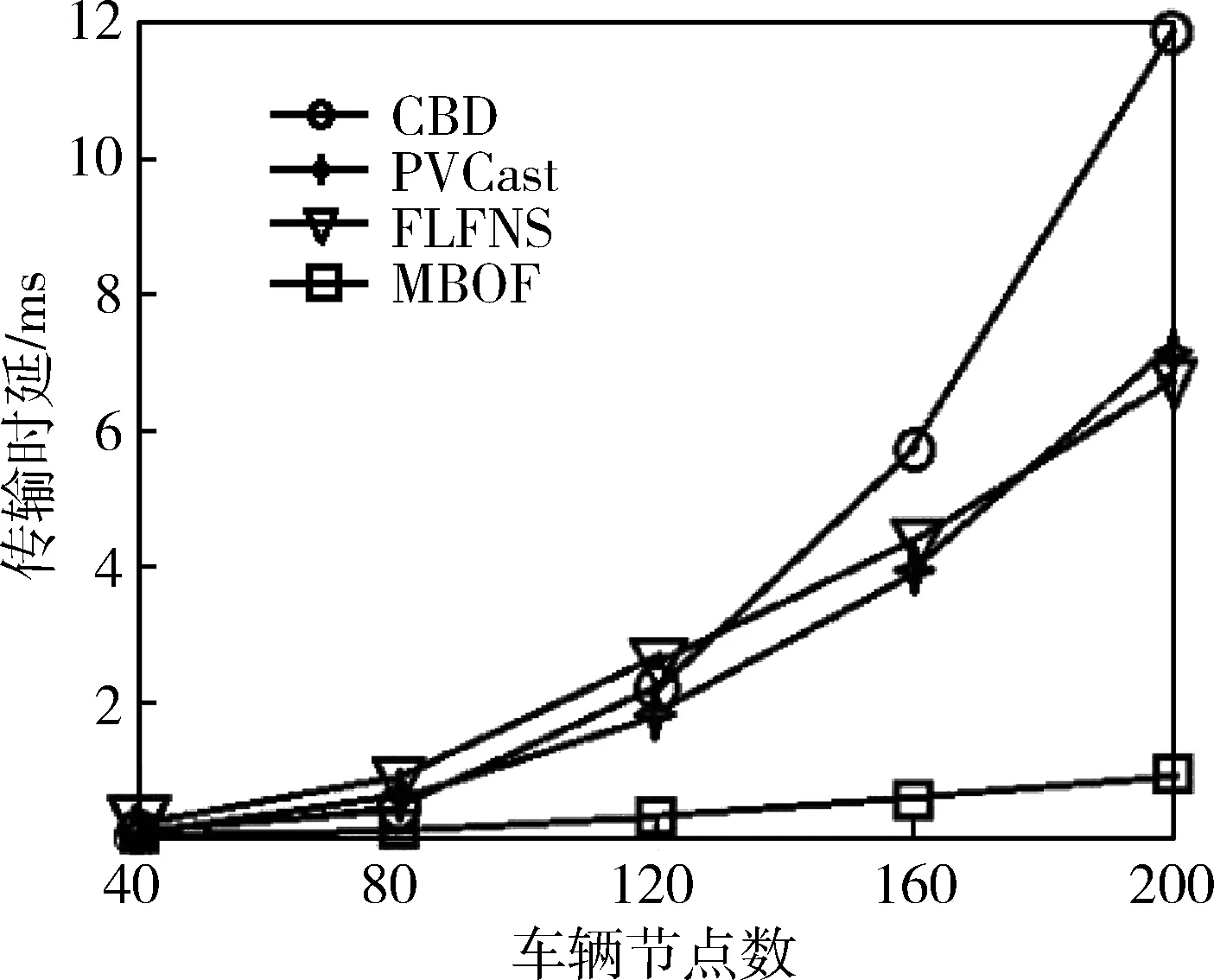
圖4 傳輸時延仿真結果
5 結論
模糊邏輯處理能夠有效地容忍錯誤數據帶來的決策錯誤問題。本文提出的基于模糊邏輯處理的廣播協議,首先采用模糊邏輯處理分析告警信息中各中繼候選節點的數據,綜合計算選出中繼節點與候補節點。然后采用候補轉發機制確保消息有效傳輸,降低數據包丟失率。實驗結果表明,對比CBD、PVCast和FLFNS協議,本文提出的MBOF協議在容錯能力上有較大提高。
[1] 李合生, 毛劍琴, 代冀陽. 基于遺傳算法的廣義Takagi-Sugeno模糊邏輯系統最優參數辨識[J].自動化學報,2002,28(4):581-586.
[2] NI S, TSENG Y. The broadcast storm problem in a mobile ad hoc network[C]//IEEE International Conference on Mobile Computing and Networking, 1999:151-162.
[3] WISITPONGPHAN N, TONGUZ O. Broadcast storm mitigation techniques in vehicular ad hoc networks[J]. IEEE Wireless Communications, 2007, 14(6):84-94.
[4] ZHUANG Y Y, PAN J P, LUO Y Q, et al. Time and location-critical emergency message dissemination for vehicular ad-hoc networks[J]. IEEE Journal on Selected Areas in Communications, 2011, 29(1):187-196.
[5] ZHANG J S, MA X M, WU T. Performance modeling and analysis of emergency message propagation in vehicular ad hoc networks[J]. Wireless Communications and Mobile Computing, 2014, 14(3):366-379.
[6] 王嫣, 馬俊峰. 多跳廣播協議的轉發節點選擇算法[J]. 計算機工程與設計, 2017,38(2):84-94.
[7] WONG F, WONGR W C. Fuzzy-decision-based routing protocol for mobile ad hoc networks[J].IEEE International Conference on Network, 2012, 17(8):47-55.
[8] SOU S. Modeling emergency messaging for car accident over dichotomized headway model in vehicular Ad-hoc networks[J]. IEEE Transactions on Communications, 2013, 61(2):802-812.
[9] CARVALHO M, GARCIA L J J. Delay analysis of IEEE 802.11 in single-hop networks[C]//Proceedings of the 11th IEEE International Conference on Network Protocols, 2013:146.
[10] ADEL B, ZOURBIR M. Adaptive contention window scheme to improve multi-hop broadcast in VANETs[C]//IEEE Vehicular Technology Conference, 2015:1-6.
[11] PARK M, KIM D. A simple SNR based linear back-off to propagate multi-hop emergency messages on the distributed VANETs[C]//Communication in Computer and Information Science, 2012:34-41.
[12] CHENG X, WANG C X. Envelope level crossing rate and average fade duration of nonisotropic vehicle-to-vehicle fading channels[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1):62-72.