基于視覺(jué)引導(dǎo)的室內(nèi)四旋翼飛行器控制系統(tǒng)研究與設(shè)計(jì)
2018-03-30 05:12:25時(shí)夢(mèng)瑤李建奇黃瑞敏田中杰
自動(dòng)化與儀表 2018年2期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
時(shí)夢(mèng)瑤,李建奇,黃瑞敏,張 斌,田中杰
(湖南文理學(xué)院 電氣與信息工程學(xué)院,常德 415000)
四旋翼飛行器設(shè)計(jì)是一項(xiàng)包含多種交叉學(xué)科的尖端技術(shù)領(lǐng)域。隨著四旋翼飛行器在軍用、民用和商用領(lǐng)域的應(yīng)用范圍越來(lái)越廣,對(duì)四旋翼飛行器在導(dǎo)航系統(tǒng)和視覺(jué)定位方面也提出了新的要求,四旋翼飛行器中通過(guò)視覺(jué)循跡成為當(dāng)下熱門(mén)研究領(lǐng)域之一[1]。基于視覺(jué)循跡是指通過(guò)圖像的目標(biāo)識(shí)別與跟蹤技術(shù)來(lái)獲得目標(biāo)的空間位置,當(dāng)四旋翼飛行器在低空飛行時(shí),可通過(guò)裝載的攝像頭來(lái)獲得實(shí)時(shí)路徑信息,并通過(guò)相應(yīng)算法,使飛行器在無(wú)人干擾的情況下移動(dòng)到目的地[2-4]。
1 系統(tǒng)總體設(shè)計(jì)
整個(gè)飛行控制系統(tǒng)總體構(gòu)成,包括飛行器平臺(tái)、圖像處理系統(tǒng)、供電電池及電壓轉(zhuǎn)換模塊和無(wú)線遙控接收系統(tǒng)。系統(tǒng)的總體設(shè)計(jì)如圖1所示。

圖1 系統(tǒng)的總體設(shè)計(jì)Fig.1 Overall design of system
飛行器平臺(tái)包括3部分:①微處理器最小系統(tǒng),用于處理數(shù)據(jù)和協(xié)調(diào)控制;②傳感器模塊,包括九軸姿態(tài)傳感器、高度傳感器,為飛控系統(tǒng)提供機(jī)體實(shí)時(shí)姿態(tài)信息和高度信息;③動(dòng)力系統(tǒng),由無(wú)刷電調(diào)、無(wú)刷電機(jī)及螺旋槳組成,電調(diào)接收PWM信號(hào),再驅(qū)動(dòng)電機(jī)帶動(dòng)螺旋槳轉(zhuǎn)動(dòng)。圖像處理系統(tǒng)包括從處理器、CMOS攝像頭處理模塊及FIFO組件等3部分。供電電池及電壓轉(zhuǎn)換模塊對(duì)整個(gè)系統(tǒng)提供3種不同的穩(wěn)定電壓,即11,5,3.3 V。無(wú)線遙控接收系統(tǒng)主要對(duì)飛行器進(jìn)行調(diào)試,使飛行器能平穩(wěn)飛行,然后記錄相關(guān)數(shù)據(jù)。
2 系統(tǒng)硬件設(shè)計(jì)
系統(tǒng)硬件主要包括飛行器平臺(tái)、動(dòng)力系統(tǒng)、圖像系統(tǒng)及電源模塊四部分電路[5]。
2.1 飛行器平臺(tái)的電路設(shè)計(jì)
飛行器平臺(tái)的電路由微控制器最小系統(tǒng)、九軸姿態(tài)傳感器、超聲波傳感器和動(dòng)力系統(tǒng)四部分組成。在此,主控制器采用STM32F407系列處理器。該芯片資源豐富,其最小系統(tǒng)包括時(shí)鐘電路、復(fù)位電路、SWD下載電路和I/O接口等。
九軸姿態(tài)傳感器MPU9150包括三軸陀螺儀、三軸加速計(jì)和三軸磁力計(jì),可減少組合陀螺儀與加速計(jì)時(shí)的軸差現(xiàn)象[6],同時(shí)加入磁力傳感器互補(bǔ)數(shù)據(jù),以預(yù)防歐拉角奇異。此外,陀螺儀具有增強(qiáng)偏置和穩(wěn)定溫度的功能,姿態(tài)檢測(cè)模塊如圖2所示。

圖2 姿態(tài)檢測(cè)模塊Fig.2 Gesture detection module
高度傳感器運(yùn)用US-100傳感器,此傳感器有2種工作模式,即利用I/O口傳輸數(shù)據(jù)和利用串口測(cè)試數(shù)據(jù)。由于UART模式操作簡(jiǎn)便且不會(huì)浪費(fèi)定時(shí)器,故釆用UART模式以達(dá)到測(cè)量高度的目的。
2.2 圖像處理系統(tǒng)的電路設(shè)計(jì)
圖像處理系統(tǒng)的電路設(shè)計(jì)由STM32F103最小系統(tǒng)電路和攝像頭處理電路組成,STM32F103相對(duì)STM32F407資源稍豐富。攝像頭數(shù)據(jù)采用SCCB總線協(xié)議傳輸,SCCB中文為串行攝像機(jī)控制總線,是一種與I2C總線相似且能夠兼容I2C的總線[4],可以用GPIO直接模擬該總線時(shí)序,完成讀寫(xiě)操作。
3 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)軟件設(shè)計(jì)的核心是主程序設(shè)計(jì),具體包括系統(tǒng)初始化程序設(shè)計(jì)、姿態(tài)解算程序設(shè)計(jì)、定高程序設(shè)計(jì)和串級(jí)PID控制程序設(shè)計(jì)等。軟件開(kāi)發(fā)工具釆用C語(yǔ)言,依靠結(jié)構(gòu)化與模塊化的核心設(shè)計(jì)思想,從后向前完成軟件設(shè)計(jì)。
3.1 系統(tǒng)主程序設(shè)計(jì)
控制系統(tǒng)的核心是主程序,其作用是結(jié)合所有驅(qū)動(dòng)子程序及數(shù)據(jù)處理程序,完成計(jì)劃任務(wù)。首先,將所有模塊初始化,包含處理器內(nèi)部模塊如中斷設(shè)置、系統(tǒng)時(shí)鐘等。初始化后,進(jìn)入系統(tǒng)自檢,自檢通過(guò)才能執(zhí)行下面的程序。主函數(shù)功能分為兩部分,一部分是遙控調(diào)試,另一部分是一鍵啟動(dòng),這是本系統(tǒng)的主要執(zhí)行方式。當(dāng)運(yùn)行任務(wù)時(shí),各種傳感器會(huì)不斷采集所需要的信息,然后經(jīng)過(guò)數(shù)據(jù)融合,再計(jì)算控制量,最終得到控制量的輸出。另外運(yùn)用多種中斷使程序更加穩(wěn)定高效。主程序流程如圖3所示。
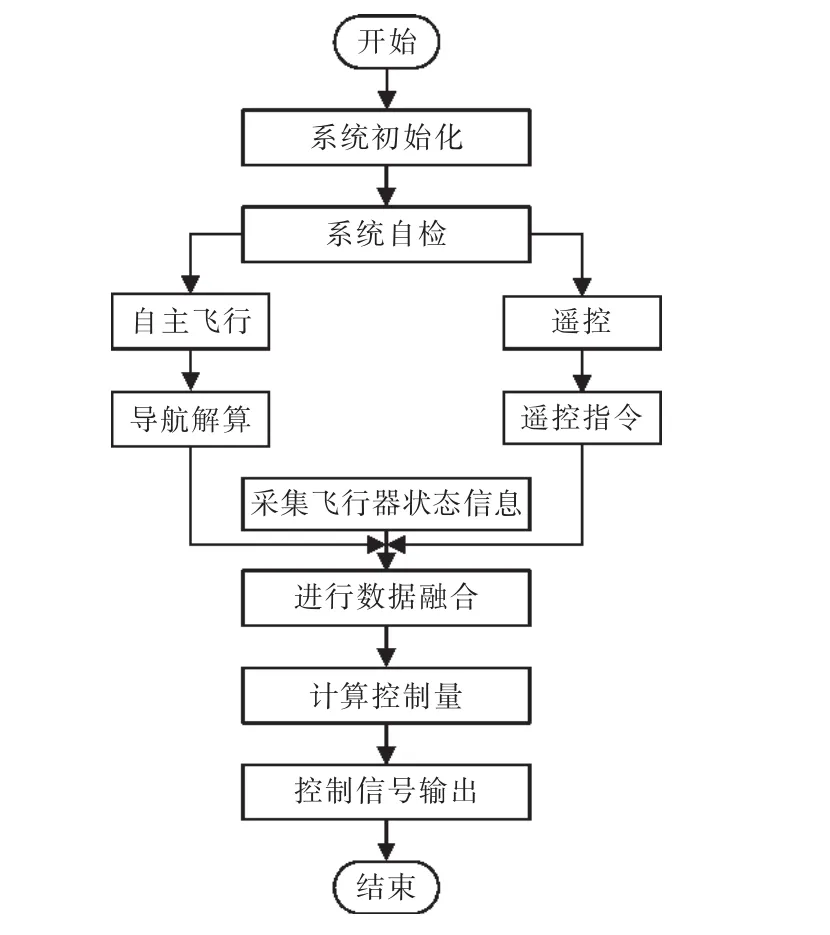
圖3 系統(tǒng)總流程Fig.3 System total flow chart
3.2 系統(tǒng)初始化程序設(shè)計(jì)
系統(tǒng)初始化主要針對(duì)外設(shè)和控制系統(tǒng)中的其他模塊進(jìn)行初始化,使之能夠穩(wěn)定正常的工作。在系統(tǒng)中,還需要對(duì)MPU9150、攝像頭模塊、滴答定時(shí)器和中斷分組進(jìn)行初始化,因此整個(gè)飛控系統(tǒng)還需要設(shè)置中斷優(yōu)先級(jí)組別。攝像頭模塊的初始化相對(duì)復(fù)雜,需要設(shè)置數(shù)十個(gè)寄存器數(shù)值,主要設(shè)置圖像的格式、亮度、對(duì)比度、分辨率、圖像尺寸等。設(shè)計(jì)中采用QVAG格式,顏色模式為YUYV,圖像尺寸為320×240。
3.3 姿態(tài)解算程序設(shè)計(jì)
消除誤差的方法有互補(bǔ)濾波法、姿態(tài)插值法、卡爾曼濾波法等,其中互補(bǔ)濾波法最常見(jiàn)。描述姿態(tài)的方法有歐拉角、四元數(shù)、方向余旋矩陣等,其中四元數(shù)方法運(yùn)算量最小且應(yīng)用廣泛,故選用四元數(shù)描述姿態(tài)。
設(shè)計(jì)姿態(tài)解算程序時(shí),采用定時(shí)器中斷的方式以確保采樣頻率固定。采樣頻率為500 Hz,即每2 ms讀取1次傳感器數(shù)據(jù),將得到的數(shù)據(jù)進(jìn)行滑動(dòng)平均濾波處理,再與陀螺儀和加速度計(jì)的數(shù)據(jù)混合,最終采用四元數(shù)法解算出實(shí)時(shí)信息[7]。另外,偏航角的解算通過(guò)磁阻傳感器數(shù)據(jù)來(lái)調(diào)整,解決了飛機(jī)自我旋轉(zhuǎn)和漂移等現(xiàn)象,最后獲取到較好的姿態(tài)信息[8]。
3.4 定高程序設(shè)計(jì)
超聲波傳感器的數(shù)據(jù)讀取采用串口中斷的方法,串行口收到1個(gè)字節(jié)的數(shù)據(jù)就產(chǎn)生1次中斷。其具體流如下:先發(fā)出觸發(fā)指令0x55,等待串行口中斷,發(fā)生中斷時(shí),需判斷收到數(shù)據(jù)的容量大小。如果為高字節(jié),需要等待下次中斷來(lái)臨,反之則將上次中斷接收的高字節(jié)數(shù)據(jù)與本次低字節(jié)數(shù)據(jù)相融合,獲得所測(cè)量的高度。定高控制算法采用的是位置式PID控制,最后定高控制輸出與姿態(tài)控制輸出疊加到4個(gè)電機(jī)控制中。
在進(jìn)行基本的姿態(tài)控制后,飛行器能夠完成基本起飛任務(wù),再進(jìn)行高度控制,即控制地理坐標(biāo)系中的Z軸。在此控制中,為使數(shù)據(jù)更加可靠穩(wěn)定,采用超聲波的融合數(shù),檢測(cè)到飛行器的實(shí)際高度數(shù)據(jù)后,與期望高度進(jìn)行比較,得出偏差,然后用PID控制器修正偏差。也可采用串級(jí)PID控制器,外環(huán)為高度,內(nèi)環(huán)為上升速度。
3.5 串級(jí)PID控制的程序設(shè)計(jì)
針對(duì)飛行器的非線性,該控制系統(tǒng)選用角度外環(huán)PID和角速度內(nèi)環(huán)PID的串級(jí)PID控制器,其內(nèi)環(huán)控制回路是角度環(huán)與角速度環(huán)相結(jié)合。對(duì)干擾的反應(yīng)靈敏且具有抑制作用[9]及提高系統(tǒng)魯棒性,是角速度閉環(huán)控制的優(yōu)點(diǎn),通常也稱(chēng)增穩(wěn)環(huán)節(jié)[10]。四旋翼飛行器串級(jí)PID的流程如圖4所示。
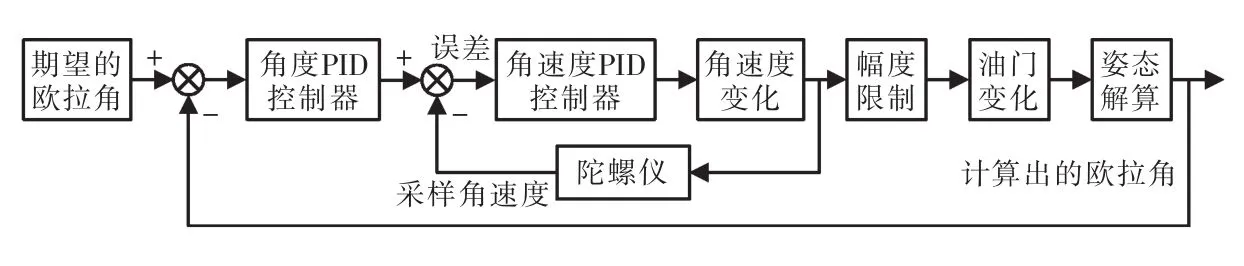
圖4 串級(jí)PID流程Fig.4 Cascade PID flow chart
3.6 主控與協(xié)控的通信協(xié)議
圖像處理系統(tǒng)往飛行控制處理系統(tǒng)發(fā)送的數(shù)據(jù)中,有飛行器離目標(biāo)X軸偏差、飛行器離目標(biāo)Y軸偏差、飛行降落標(biāo)志位,然而圖像處理系統(tǒng)與飛行處理系之間通過(guò)串口通信,單一地發(fā)送數(shù)據(jù)使得飛行控制系不能正確地收到數(shù)據(jù)。因此,圖像處理系統(tǒng)與飛行控制處理系統(tǒng)之間需要通信協(xié)議,圖像處理系統(tǒng)采用這一協(xié)議發(fā)送數(shù)據(jù),飛行控制系統(tǒng)按這一通信協(xié)議解析數(shù)據(jù),使得圖像處理系統(tǒng)與飛行控制系統(tǒng)可以正常收發(fā)數(shù)據(jù)。通信采用RS232串口通信,通信的幀格式見(jiàn)表1。
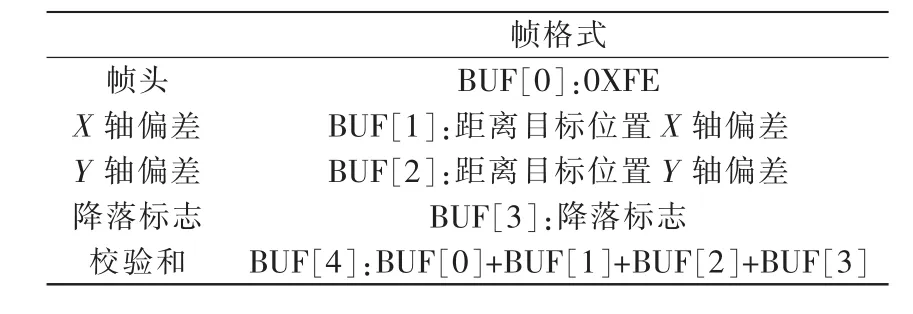
表1 通信的幀協(xié)議Tab.1 Communication frame protocol
4 視覺(jué)尋跡算法的設(shè)計(jì)與實(shí)現(xiàn)
通過(guò)采集攝像頭傳感器對(duì)路徑的圖像信息,結(jié)合預(yù)處理和中心線提取,確定黑線位置,再通過(guò)視覺(jué)導(dǎo)航建立飛行器在水平面上的相對(duì)位置,最后通過(guò)位置控制得到需要補(bǔ)償?shù)淖藨B(tài)角,可方便調(diào)節(jié)飛行時(shí)對(duì)照線路的偏差,使飛行器在尋跡飛行時(shí)可準(zhǔn)確按照飛行線路飛行。
4.1 圖像采集原理
圖像時(shí)序如圖5所示。VSYN為2個(gè)正脈沖之間的時(shí)間,為一個(gè)完整圖像;HREF為掃描該圖像中各行像素的時(shí)間,高電平時(shí)為有效時(shí)間;PCLK表示同步信號(hào)由有效像素值提供,高電平時(shí)輸出有效圖像數(shù)據(jù)。若當(dāng)前圖像窗口大小為320×240,則在2個(gè)正脈沖之間有240個(gè)HREF的正脈沖,即240行;在每個(gè)HREF正脈沖期間有320個(gè)PCLK正脈沖,即每行320個(gè)像素[5]。
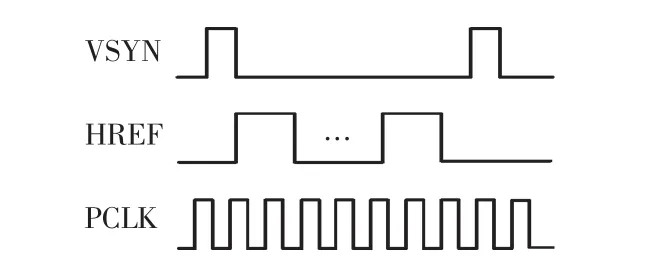
圖5 圖像的時(shí)序圖Fig.5 Timing diagram of image
4.2 圖像的預(yù)處理
通常,機(jī)載攝像頭獲取圖像會(huì)受到無(wú)人機(jī)的振動(dòng)、環(huán)境因素的影響,存在噪聲干擾、失真等問(wèn)題,使圖像質(zhì)量明顯下降。為了提高圖像的精度,在提取目標(biāo)圖像的特征前,必須采取一定措施用于降低干擾的影響,以方便后續(xù)處理如圖像灰度與二值化和濾波。
4.3 賽道提取算法
路徑識(shí)別系統(tǒng)中重要的環(huán)節(jié)是提取黑線中心部分,根據(jù)系統(tǒng)特性,采用中心線提取法來(lái)提取路徑。具體過(guò)程是:先判斷每行的起始點(diǎn)是否為黑點(diǎn),若不是則對(duì)白點(diǎn)計(jì)數(shù)(設(shè)計(jì)數(shù)為x),當(dāng)為連續(xù)黑點(diǎn)時(shí)計(jì)黑點(diǎn)個(gè)數(shù)(設(shè)計(jì)數(shù)為y),再次為白點(diǎn)時(shí)退出計(jì)數(shù),這時(shí)黑線中心位于第(x+y/2)列;若起始點(diǎn)為黑點(diǎn),且不連續(xù),則對(duì)黑點(diǎn)計(jì)數(shù)(設(shè)計(jì)數(shù)為b),當(dāng)遇到連續(xù)白點(diǎn)后退出計(jì)數(shù),此時(shí)黑線中心位于第(b/2)列。最后,將得到的所有中心位置,按順序儲(chǔ)存在數(shù)組中[5]。雖然已去除噪音,但仍有干擾會(huì)使某些黑線中心位置產(chǎn)生誤差,為此需要在產(chǎn)生誤差的地方做差值處理,則黑線中心值即為前后2行的平均值[7]。
4.4 視覺(jué)導(dǎo)航
為準(zhǔn)確描述四旋翼飛行器的空間運(yùn)動(dòng)狀態(tài)信息,需定義以下坐標(biāo)系[11]:
攝像頭坐標(biāo)系Γc在機(jī)身下方安裝攝像頭,設(shè)光心與飛機(jī)質(zhì)心重合,坐標(biāo)系的原點(diǎn)Oc為光心,Zc軸為光軸,Xc軸和Yc軸為2條垂邊,分別與圖像平面平行[11]。
圖像坐標(biāo)系xOy攝像頭成像原理與小孔成像原理相似,會(huì)產(chǎn)生跑道軌跡與所投影的圖像分別在攝像頭光心的兩側(cè)且圖像倒立等現(xiàn)象,故設(shè)成像平面在攝像頭的光心和跑道之間[11]。
像素坐標(biāo)系uO′v坐標(biāo)單位為像素,坐標(biāo)系原點(diǎn)O′位于圖像的左上角,u軸和v軸分別平行于圖像坐標(biāo)的x軸和y軸[11]。
由于QUAV屬于低空低速飛行狀態(tài),攝像頭的焦距遠(yuǎn)小于跑道軌跡到攝像頭光心的距離,因此攝像頭成像可認(rèn)為是小孔成像原理[11],其模型如圖6所示。

圖6 機(jī)體坐標(biāo)與攝像頭坐標(biāo)系的轉(zhuǎn)換關(guān)系和透視投影模型Fig.6 Transforming relation and perspective projection model between body coordinate and camera coordinate system
飛行器通過(guò)攝像頭識(shí)別跑道軌跡信息時(shí),提取圖像特征后,當(dāng)跑道路線中心線上中心點(diǎn)的投影點(diǎn)P,與機(jī)體質(zhì)心投影點(diǎn)O位于同一點(diǎn)時(shí),說(shuō)明飛行器正好在跑道路線上方飛行;未重合則說(shuō)明飛行器與跑道路線有偏差,需調(diào)節(jié)位置偏差[11],由此奠定四旋翼循跡自主飛行基礎(chǔ)并提供位移控制量[5-11]。
4.5 位置控制
設(shè)軌跡中心線上的中心點(diǎn)在地面坐標(biāo)系下的坐標(biāo)為[xd,yd,0]T, 圖像坐標(biāo)系的原點(diǎn)為機(jī)體質(zhì)心在圖像上的投影點(diǎn),設(shè)其坐標(biāo)為y0-y1分別為飛行器相對(duì)于軌跡的左右位移差、距離位移差;x0-xi,y0-yi分別為飛行器左右、前后平移速度誤差。設(shè)z0為目標(biāo)飛行高度,飛機(jī)飛行過(guò)程中超聲波測(cè)量高度為zi,則高度誤差為z0-z1[11-12]。
5 系統(tǒng)測(cè)試與分析
定高控制PID的參數(shù)調(diào)試,可以先根據(jù)控制輸出的PWM值和高度數(shù)據(jù)的計(jì)算,把4個(gè)軸綁住大致確定出參數(shù),再根據(jù)實(shí)際飛行效果最后確定出參數(shù)。定高控制的積分需要限幅,否則會(huì)導(dǎo)致積分誤差越來(lái)越大,使飛行器越飛越高,積分限幅的大小由四軸飛行器本身的重力決定。四軸飛行器定高控制高度數(shù)據(jù)波形如圖7所示。
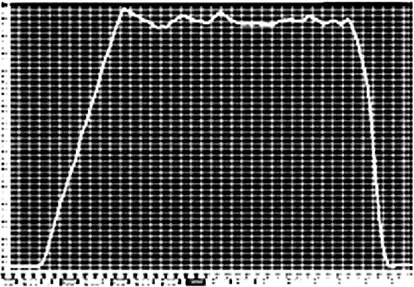
圖7 四軸飛行器定高調(diào)試Fig.7 Fixed altitude adjustment of four axis rotorcraft
利用keil5實(shí)現(xiàn)在線調(diào)試,如圖8所示,RC_Pwm_In 的[0]—[3]分別為 ROLL,PITCH,THR(油門(mén))及 YAW 的實(shí)際值,Distance[2]為超聲波的高度值,291為超聲波的測(cè)量高度 29.1 cm;Roll,Pitch及Yaw為陀螺儀解算出來(lái)的當(dāng)前姿態(tài)角。黑線正中間是160,即飛行器處于正中間。OV7670的分辨率為320×240,所以0代表最左端,319代表最右端。
四旋翼飛行器自主飛行的試驗(yàn)效果如圖9所示,懸停效果如圖10所示。
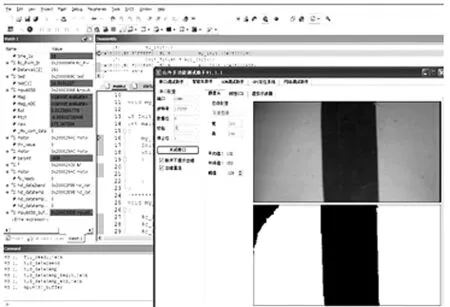
圖8 飛控平臺(tái)的整體調(diào)試Fig.8 Overall debugging of the flight control platform
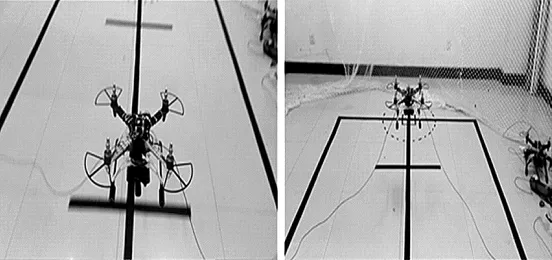
圖9 實(shí)際飛行調(diào)試Fig.9 Actual flight debugging
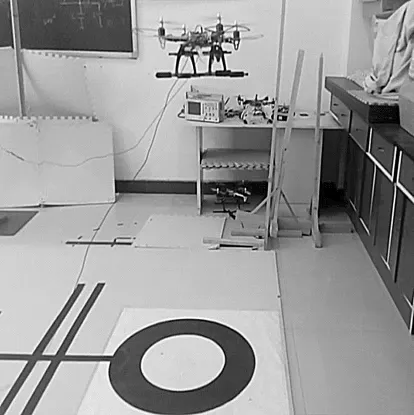
圖10 懸停效果測(cè)試Fig.10 Hover effects test
6 結(jié)語(yǔ)
對(duì)四旋翼飛行器進(jìn)行了軟硬件設(shè)計(jì),在飛控平臺(tái)上開(kāi)展了自主尋跡飛行的研究與設(shè)計(jì)。通過(guò)超聲波傳感器進(jìn)行高度采集,經(jīng)過(guò)高度PID進(jìn)行高度的定位;通過(guò)姿態(tài)測(cè)量傳感器進(jìn)行姿態(tài)分析,再通過(guò)姿態(tài)解算進(jìn)行平衡調(diào)整;通過(guò)中心線提取法對(duì)黑線路徑進(jìn)行了提取,通過(guò)視覺(jué)導(dǎo)航得出了飛行的實(shí)際位置,再通過(guò)循跡算法得出了相應(yīng)控制量再融入姿態(tài)數(shù)據(jù)進(jìn)行結(jié)算,便于與位置控制器解得到的結(jié)果作差,提高了調(diào)節(jié)實(shí)際飛行軌跡與跑道軌跡偏差的靈敏性,使四旋翼飛行器在自主尋跡飛行時(shí)能準(zhǔn)確按照跑道軌跡飛行,如果飛行過(guò)程中出現(xiàn)位置偏差,可及時(shí)調(diào)整好飛行方向。
[1]楊明志,王敏.四旋翼微型飛行器控制系統(tǒng)設(shè)計(jì)[J].計(jì)算機(jī)測(cè)量與控制,2008,16(4):485-490.
[2]凌金福.四旋翼飛行器飛行控制算法的研究[D].南昌:南昌大學(xué),2013.
[3]Salih A L,Moghavvemi M,Mohamed H A F,et al.Modelling and PID controller design for a quadrotor unmanned air vehicle[C]//Automation Quality and Testing Robotics (AQT R).2010 IEEE International Conference on IEEE,2010(1):1-5.
[4]劉煥曄.小型四旋翼飛行器飛行控制系統(tǒng)研究與設(shè)計(jì)[D].上海:上海交通大學(xué),2009.
[5]Xu L F,Jiang S D.Research of intelligence control for flying altitude of four rotors flyer[C]//International Conference on ArtificialIntelligence and ComputationalIntelligence.2010:294-298.
[6]陳海濱,殳國(guó)華.四旋翼飛行器的設(shè)計(jì)[J].實(shí)驗(yàn)室研究與探索,2013,32(3):41-44.
[7]王福,鮮斌,黃國(guó)平,等.四旋翼無(wú)人機(jī)自主懸停控制研究[C]//2013年第32屆中國(guó)控制會(huì)議論文集.西安:中國(guó)自動(dòng)化學(xué)會(huì)控制理論專(zhuān)委會(huì)、中國(guó)系統(tǒng)工程學(xué)會(huì),2013:620-625.
[8]于雅莉,孫楓,王元昔.基于多傳感器的四旋翼飛行器硬件電路設(shè)計(jì)[J].傳感器與微系統(tǒng),2011,30(8):113-115.
[9]李俊,李運(yùn)堂.四旋翼飛行器的動(dòng)力學(xué)建模及PID控制[J].遼寧工程技術(shù)大學(xué)學(xué)報(bào),2012,31(1):114-117.
[10]岳基隆,張慶杰,朱華勇.微小型四旋翼無(wú)人機(jī)研究進(jìn)展及關(guān)鍵技術(shù)淺析[J].電光與控制,2010,17,(10):46-52.
[11]張婧.四旋翼無(wú)人機(jī)自主飛行控制系統(tǒng)設(shè)計(jì)與開(kāi)發(fā)[D].海口:海南大學(xué),2015.
[12]劉峰,呂強(qiáng),王國(guó)勝,等.四軸飛行器姿態(tài)控制系統(tǒng)設(shè)計(jì)[J].計(jì)算機(jī)測(cè)量與控制,2011,19(3):583-585.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
