基于模糊PID電動振動臺控制系統設計與實現
2018-03-30 01:29:14王會民陳家焱趙佃云
自動化與儀表 2018年1期
王會民,洪 濤,陳家焱,趙佃云
(中國計量大學 質量與安全工程學院,杭州 310018)
飛行器、艦船、車輛等運載工具上的機械設備、電子器件在生產、運輸、工作和維修時常處于一個復雜的振動環境之中。振動帶來的危害不容小覷,在機械加工領域,振動往往會造成機械結構的磨損,降低加工精度;在交通運輸領域,振動會降低車輛的安全度和舒適度;在航空航天領域,很多火箭發射失利是由于振動引起的[1]。為保障結構或系統的安全性和可靠性,在其研制過程中需要對其進行地面振動環境模擬試驗和可靠性試驗。這類試驗對于指導機械結構的優化設計,保證系統結構強度、提高設備的總體性能等諸多方面具有極為重要的意義,同時也是許多產品設計規范的強制性要求[2]。
正弦振動是地面振動環境模擬試驗的重要振動形式,而電動振動臺系統是進行正弦振動的主要系統。其中電動振動臺控制系統是整個振動系統的核心[3]。通過分析電動振動臺控制系統的特點和電氣控制要求,可以通過Modbus-ASCII通信協議將PLC與變頻器結合以實現對電動振動臺體的控制,同時通過LabVIEW的NI OPC通道實現PLC與上位機的交互。
1 電動振動臺控制系統總體方案
本次設計的電動振動臺系統如圖1所示,它由上位機、電動振動臺控制系統、電動振動臺體、冷卻系統組成[4]。

圖1 典型電動振動臺系統Fig.1 Typical electric shaker system
上位機負責電動振動臺控制系統運行參數的輸入和振動運行情況的顯示;電動振動臺控制系統接收上位機的輸入參數,對振動臺體進行控制,同時將電動振動臺的運行情況傳遞給上位機;電動振動臺體實際上是將電能轉化為機械能的裝置,是一個振動源;由于振動臺在工作的時候,勵磁線圈及驅動線圈中都通有很大的電流,因此會產生大量的熱量,所以需要冷卻系統對振動臺進行降溫冷卻。電動振動臺控制系統是整個電動振動臺系統的核心。根據電動振動臺控制系統需產生正弦變化電流的原理,可以選用PLC控制變頻器的方案實現電動振動臺控制系統的功能。其設計方案如圖2所示(這里的PLC為臺達DVP12SA211T,變頻器為臺達VFD015B21A,AD轉換器為 DVP04AD,DA轉換器為 DVP04DA)。
1.1 電動振動臺控制系統硬件

圖2 電動振動臺控制系統設計方案Fig.2 Electric shaker control system design
電動振動臺控制系統硬件設計采用“PLC+計算機”的控制方案。計算機作為上位機主要負責上層控制,包括整個系統參數的輸入與顯示、修改PLC程序、控制操作(人機交互)界面、數據庫等;PLC作為下位機主要負責底層控制,包括變頻器輸出頻率、自動增益放大器的控制、振動方向的選擇等。
下位機PLC選用臺達DVP12SA211T,晶體管輸出,24 VDC供電,8輸入/4輸出,提供2軸100 kHz高速脈沖輸出,內置1組RS-232與2組RS-485通訊端口(主/從站),兼容標準Modbus ASCII/RTU通訊協議。上位機通過串口、采用NI OPC協議與PLC的RS-232通信端口建立起通信[5],用以向PLC傳遞上位機的輸入參數和向上位機傳遞電動振動臺的運行情況,而PLC通過Modbus協議經RS-485總線與變頻器控制產生頻率變化的電流[6]。
1.2 電動振動臺控制系統PLC程序
此PLC程序采用模塊化的編程思想,將整個程序分為若干個子程序模塊,在主程序中對各子程序模塊進行組合、調用。在本系統中,子程序模塊包括系統初始化程序、定頻測試程序、線性掃頻程序、對數掃頻程序、多階測試程序等。程序流程如圖3所示。

圖3 電動臺振動控制PLC流程Fig.3 Electric shaker control PLC flow chart
2 電動振動臺PLC控制策略研究
電動振動控制系統是以PLC+變頻器的控制模式,配合加速度傳感器、繼電器、自動增益放大器對振動過程進行自動控制。這里的PLC有2個作用:一是與變頻器結合產生電動振動臺驅動信號;二是PLC通過加速度目標值與測量值的比較得到一個控制量,通過這個控制量調整激勵電流的大小。
2.1 電動振動臺驅動信號生成算法
電動振動臺驅動信號產生流程如下,首先在PLC程序里對RS-485通信端口進行初始化(設置端口號、波特率、奇偶檢驗位、數據位),然后通過MODED指令來獲取變頻主頻率和MODWR指令來設置變頻器的主頻率等相關參數,從而生成我們需要的頻率恒定、頻率線性變化、頻率對數變化、頻率多階段變化4種模擬信號。頻率恒定信號、頻率線性變化信號、頻率對數變化信號和頻率多階段變化信號是 PLC 分別按照式(1)~式(4)產生的。

式中:f0為頻率恒定信號的初始頻率,Hz;f為頻率恒定信號的頻率,Hz。

式中:m為線性掃頻速率,Hz/min;f0為線性掃頻初始頻率,Hz;t為時間,s;f為與 t對應的頻率線性變化信號的頻率,Hz。

式中:n為對數掃頻速率,倍頻程/min;f0為對數掃頻初始頻率,Hz;t為時間,s;f為與 t對應的頻率對數變化信號的頻率,Hz。

式中:f0為頻率多階段變化信號的初始頻率,Hz;t為時間,s; f1、 f2、 fn為分別與時間段(t1,t2]、(t2,t3]、(tn,tn+1]對應的頻率多階段變化信號的頻率,Hz;t1、t2、t3、tn、tn+1為頻率多階段變化信號頻率發生變化的時間點,s。
同時PLC對此過程進行計時,當達到Z軸或X、Y軸的運動時間,將DVP-SA2的2個輸出口相應的置1或0來激發相應的繼電器開或關,從而驅動電動振動臺體Z軸或X、Y軸運動。
2.2 基于模糊PID復合控制的加速度控制算法
加速度控制是整個電動振動控制系統的核心環節。其自動控制原理是PLC根據不同頻率應達到的加速度的目標值與實際測量值比較后得到一個控制量,再由這個控制量控制自動增益放大器調節激勵信號[7]。控制過程如圖4所示

圖4 加速度的模糊PID復合控制原理Fig.4 Acceleration fuzzy-PID composite control principle

圖5 加速度隨頻率的變化曲線Fig.5 Acceleration versus frequency curve
其目標加速度隨頻率的變化曲線如圖5所示(圖中橫、縱坐標皆為對數刻度),由圖可知其加速度的變化分為兩部分。第一部分加速度線性變化,第二部分加速度一直穩定在某一個值。根據加速度這樣的變化規律,提出一種模糊PID復合控制的加速度控制算法。通過設置一個開關量R0即加速度線性變化部分與穩定部分的轉折點,根據輸入量所處范圍的不同選擇不同的控制器。當輸入量小于R0時,此時加速度變化較快且變化量大,可以利用模糊控制器動態性好,上升速度快,超調量小的優點,當輸入量大于R0時,此時加速度穩定在某一個值,可以利用PID控制器控制精度高、穩態性的優點,其控制原理如圖6所示。
其中PID控制器選用的是積分分離式PID控制算法,其控制算法如下:


圖6 模糊PID復合控制Fig.6 Fuzzy-PID composite control
式中:k 為采樣序號 1,2,3…;u(k)為第 k 次采樣時刻的輸出值;e(k)為實際測量值的第k次采樣與目標設定值的控制偏差;e(k-1)為實際測量值的第k-1次采樣與目標設定值的控制偏差;Kp為控制器的比例系數;α為積分項的開關系數,當時,α=1,反之,α=0;Ki為控制器的積分時間常數;Kd為控制器的微分時間常數;T為采樣周期[8]。積分分離式PID控制就是人為設定一個ε閾值(ε>0),當誤差值超過這個閾值ε時,采用PD控制,這樣可避免產生過大的超調,又可以使系統有較快的響應。當偏差小于閾值ε時,又采用PID控制,以保證系統的控制精度[9]。
模糊控制器是運用模糊數學的基本理論和方法,把控制規則的條件、操作用模糊集表示,并把這些模糊控制規則及有關專家的控制信息作為知識存入計算機知識庫中[10],然后計算機根據控制系統實際響應狀況,運用模糊控制規則表中的相關的規則進行模糊推理的一種控制器,包括模糊化、模糊推理、模糊判決三部分,其中r為系統設定值精確量;e、ec分別為系統誤差與誤差變化率精確量;E、Ec分別為反映系統誤差與誤差變化的語言變量的模糊集合(模糊量);u為模糊控制器的輸出的控制作用(精確量);y為系統輸出(精確量)。
在設定掃頻模式為線性掃頻,掃頻范圍為6 Hz~32 Hz,掃頻時間間隔為 1 s,掃頻率為 1 Hz/s,掃頻方向為向上掃頻,恒加速度為2g,恒位移為2 mm的情況下,分別采用PID控制算法、模糊控制算法、模糊PID復合控制算法對電動振動臺進行控制,其控制效果如圖7所示(圖中橫、縱坐標皆為對數刻度),PID控制下的加速度值在轉折點 (即圖中標準加速度值線性變化與穩定不變的交接點,以下簡稱轉折點)之前與標準加速度值之間的誤差較大,在轉折點之后與標準加速度值之間的誤差很小,模糊控制下的加速度值在轉折點之前與標準加速度值之間的誤差較小,在轉折點之后與標準加速度值之間的誤差較大,而模糊PID復合控制則綜合了模糊控制與PID控制的優點,其加速度的誤差小于國標GB/T13310-2007規定的±10%的范圍,由此證明將此模糊PID復合控制運用于電動振動臺的加速度控制中是可行的。
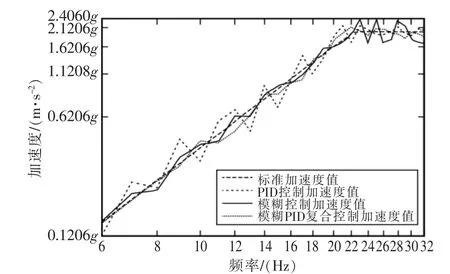
圖7 三種不同控制算法的加速度變化Fig.7 Three different control algorithm acceleration changes
3 電動振動臺控制系統界面設計
計算機采用虛擬儀器LabVIEW作為開發平臺,用其創建電動振動控制系統的人機交互界面。LabVIEW是圖形化的程序語言,它提供了大量與實際儀器相似的旋鈕、開關、指示燈等控件,是實現儀器編程和數據采集系統的便捷方式,具有運行速度快,調試和維護簡單,靈活性好的優點[11-12]。該上位機主要包括定頻測試、線性掃頻、對數掃頻、多階測試四個功能模塊組成。每個模塊都包括試驗命令設置區(用來啟動、暫停、停止試驗)、試驗狀態顯示區(用以試驗進行過程中一些參數的實時顯示)、試驗參數設置區 (用以對試驗進行前一些參數進行設置)、圖形顯示區(用圖形顯示試驗運行過程中參數的動態變化)、特殊功能區(特殊功能包括返回主界面功能的“關閉試驗”、將試驗運行過程中的情況保存為圖片的“導出圖片”)如圖8所示。
由于振動系統本身的時變性和環境的干擾,可能導致加速度測量值與設定值存在一定的誤差。這里為了表示誤差的大小,在加速度目標值的上下±3 dB、±6 dB處設置了高低報警譜、高低中斷譜(圖8右上小圖中的4條直線),而彎曲的那條色譜線為系統實際運行中的加速度。為了便于觀察實際的加速度處于哪種狀態,圖7左側創建了5個LED燈表示實際的加速度處于的狀態,比如加速度處于高報警譜與低報警譜之間,則正常LED燈亮(如圖8所示),再比如實際的加速度高于高中斷譜,則高中斷LED亮,同時觸發“試驗命令窗口”中的暫停按鈕以防止損壞。
電動振動控制系統的使用步驟如下:
步驟1 首先將要進行振動測試的產品用夾具固定在振動臺體上,然后啟動電動振動控制系統;
步驟2 通過電動振動控制系統人機交互主界面選擇要進行的哪種振動試驗,進入功能界面設置掃頻的上下限頻率、系統運行時間、開始運行頻率掃頻率等一系列參數;
步驟3 按下試驗開始按鈕,啟動振動試驗,這時系統開始計時,振動臺體與測試產品開始振動;
步驟4 當加速度測量值與目標設定值相差較大時,PLC通過計算差值得到一個控制量來調整自動增益放大器的輸出,從而使測量值與目標值保持一致;
步驟5 在試驗進行過程中,可隨時暫停、繼續、停止試驗,另外當系統計時達設定時間后,系統也會自動停止試驗;
步驟6 試驗進行完以后,可點擊特殊功能區中的“導出圖片”按鈕,將試驗情況保存下來。
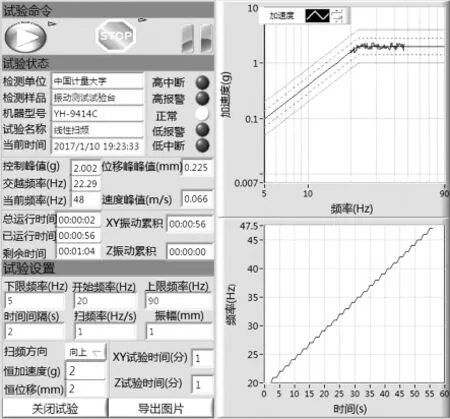
圖8 功能界面Fig.8 Functional interface
4 結語
本文利用PLC與變頻器成功實現了對電動振動臺體的控制,同時借助LabVIEW這個強大的開發平臺,創建了友好的人機交互界面。本電動振動臺PLC控制系統在投入運用中運行良好,可靠性高,操作和維護方便,滿足了對產品進行地面振動環境模擬試驗和可靠性試驗的要求。本控制系統也可以改造應用于控制機械振動臺和液壓振動臺,具有較高的推廣和使用價值。
[1]徐鑒.振動控制研究進展綜述[J].力學季刊,2015(4):547-565.
[2]韓俊偉,張連朋.多自由度振動臺的發展與控制技術[J].液壓與氣動,2014(1):1-6.
[3]宦海祥,范真.電動振動設備的發展及展望[J].環境技術,2006,24(4):28-31.
[4]陳小慧.電動振動臺動力學建模及其擴展臺面設計[D].成都:西南交通大學,2008.
[5]林獻坤,朱琳,高禮剛.基于LabVIEW和OPC的三軸加載機測控系統開發[J].儀表技術與傳感器,2015(5):59-61.
[6]趙洪業,曲波,高翔,等.基于PLC的油氣分離中控系統性能檢測系統[J].自動化與儀表,2017,32(1):51-53.
[7]冉育強,李軍,楊軍.基于PLC的環境模擬系統溫度控制算法的研究與實現[J].計算機測量與控制,2015,23(10):3377-3380.
[8]呂華芳,楊漢波,叢振濤,等.基于PLC控制的室內降雨入滲自動測定系統[J].農業機械學報,2014,45(9):144-149.
[9]胡科峰,周云飛,李作清,等.基于積分分離的PID位置控制器的設計[J].機床與液壓,2004(5):19-21.
[10]王明軍.基于模糊PID的箱式電加熱爐控制系統[D].大連:大連理工大學,2009.
[11]許超,徐惠鋼,謝啟.基于LabVIEW的變頻器老化檢測系統[J].儀表技術與傳感器,2016(5):68-72.
[12]趙梅,胡天亮,張倩,等.基于LabVIEW的AMT數據采集系統設計與研究[J].山東大學學報:工學版,2011,41(6):70-74.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
防爆電機(2020年3期)2020-11-06 09:07:42
天天愛科學(2020年6期)2020-09-10 07:22:44
測控技術(2018年5期)2018-12-09 09:04:50
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年7期)2017-06-05 09:36:13
