基于dSPACE的混合動力汽車控制策略半實物仿真平臺
2018-03-30 01:29:35杜常清徐懂懂
自動化與儀表 2018年1期
杜常清,徐懂懂
(武漢理工大學 現代汽車零部件技術湖北省重點實驗室 汽車零部件技術湖北省協同創新中心,武漢 430070)
隨著能源的日益消耗與環境的逐漸惡化,發展新能源汽車成為現代汽車工業的方向。混合動力汽車既可以改善燃油經濟性,也可以降低排放,被認為是近期最有希望替代傳統汽車的方案。由于混合動力汽車是一個復雜的多能源綜合系統,在完成系統開發過程中的建模與仿真后,還要通過試驗對系統進行匹配標定,并對控制策略進行驗證、優化和評價,因此需要一個真實的試驗環境[1]。
隨著科技的進步,計算機在試驗臺測控系統上得到了廣泛的使用,然而采用傳統的A/D計算機、D/A組合進行試驗臺測控系統開發存在一定不足,主要體現在控制算法實現時需要考慮計算機底層的接口設計,控制算法參數選擇不當時還可能引起系統的不穩定,從而需要停機重新修改參數或設計。文獻[2]開發的基于Matlab/xpc平臺的半實物仿真平臺成本低、系統構建方便,但不能實現在線調整控制參數,并受限于控制模塊的復雜度和硬件資源。文獻[3]利用Matlab開發的基于MPC555的半實物仿真平臺,需要引入實時系統,才能實現整車數據的實時反饋,增加了開發成本。
為解決以上問題,本文開發了基于dSPACE系統平臺的混合動力汽車半實物仿真平臺,可以在Simulink的仿真環境里直接添加鏈接實際被控對象的I/O接口,無需考慮A/D、D/A接口的軟件程序設計;在dSPACE的試驗軟件中只需調節控制算法需要的參數就可以進行實時在線仿真試驗測試,在此基礎上進行實際控制策略與車輛模型的半實物實時仿真試驗,試驗結果比純仿真更接近實際,從而提高控制策略的可靠性,可大大縮短混合動力汽車控制策略的開發周期[4]。

圖1 試驗臺架原理Fig.1 Schematic diagram of test bench
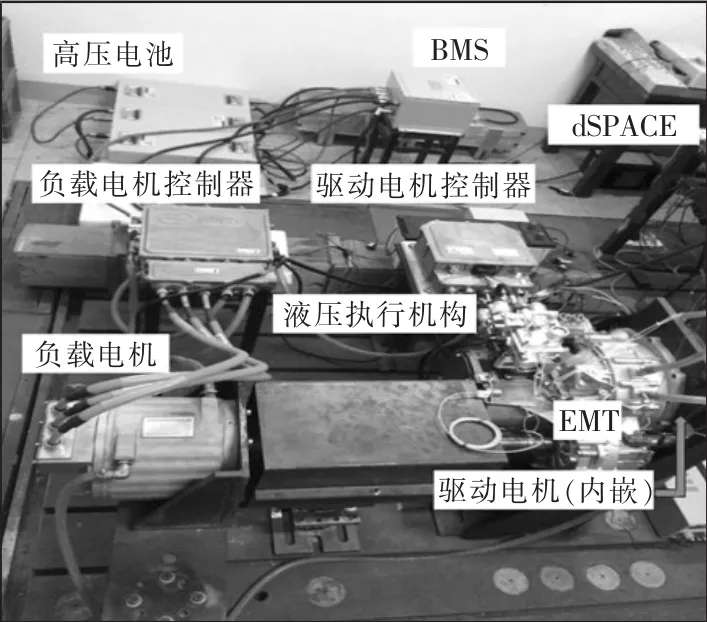
圖2 試驗臺架實物Fig.2 Physical diagram of test bench

表1 EMT電機參數Tab.1 Parameters of EMT motor
1 硬件在環仿真試驗平臺設計
1.1 dSPACE實時仿真系統開發平臺
德國dSPACE系統作為半實物仿真與控制器開發優秀的軟硬件平臺能夠實現和Matlab/Simulink的無縫連接。使用該平臺用戶能將更多的精力集中在控制策略的設計優化上,基于dSPACE進行快速原型設計開發的一般流程如下:
(1)使用如Matlab/Simulink/Stateflow等主流的設計、控制軟件建立圖形化控制模型并進行離線仿真;
(2)將離線仿真模型中的輸入參量使用ADC或者CAN通信等模塊代替,輸出模塊使用DAC或者CAN通信等模塊代替完成I/O配置;
(3)在Simulink環境下配置好模型參數利用自動代碼生成技術生成實時C代碼,并通過RTW生成能夠在dSPACE硬件上運行的文件;
(4)dSPACE提供了交互式控制軟件 Control Desk,利用該軟件用戶能快速建立虛擬儀器對試驗過程進行監控,且可實現在線參數調控[5-8]。
1.2 混合動力試驗臺系統構成及原理
為了測試控制策略在真實系統中的控制效果,搭建了EMT試驗臺架,進行混合動力系統EMT臺架試驗,臺架主要由以下部分構成:①EMT、負載電機及其相應的控制器、高壓電池及BMS等高壓系統;②dSPACE控制系統;③油泵、電磁閥、各類傳感器及其低壓供電系統;④聯軸器、固定支架、冷卻回路等物理系統。EMT臺架測試系統的原理圖如圖1所示。
從成本和慣性負載兩方面考慮,在設計試驗臺架時使用了另外一臺電機作為負載(功能與測功機類似,稱為負載電機),測功機能夠在動力系統試驗中施加載荷并且可以對所測對象進行全面綜合的測試,但主流的測功機成本相對較高,許多用戶沒有條件接受;真實系統在換檔過程中車輛雖然中斷動力傳遞但繼續依靠慣性前行,速度基本保持不變,在試驗臺架中如果EMT輸出軸無法提供合適的轉動慣量,這將與實際車輛換檔過程存在較大差異。負載電機的存在為變速器輸出軸提供了合適的負載,并能夠模擬實際車速為換檔提供條件,且成本較主流測功機大幅度降低。
EMT電機與負載電機參數如表1、表2所示。
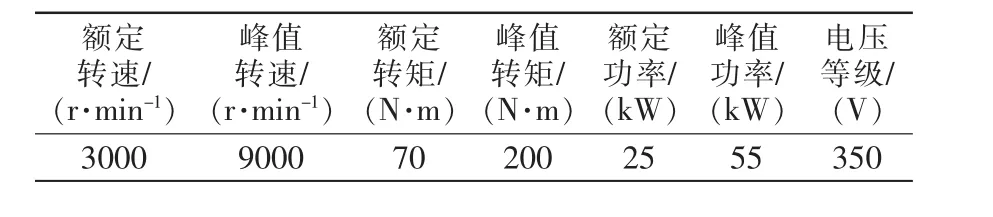
表2 負載電機參數Tab.2 Parameters of load motor
dSPACE使用DS1103平臺,系統主處理器采用PowerPC 750GX@1.0 GHz、DSP從處理器為 TI TMS320F、配備ISO 11898-2高速CAN總線,具有20路模擬輸入(4路并行AD、16路復用AD,采集范圍±10 V)、8 路獨立 DA(輸出范圍±10 V)、數字 IO(可獨立編程TTL通道,4通道8位數字I/O口,共32 Bit)、通訊接口(CAN 接口、串行接口,支持RS232、RS422收發器)等。
輪速傳感器安裝在EMT主減速器殼體處,在EMT換檔操縱機構處有4個電磁閥(選檔電磁閥1、2,換檔電磁閥1、2)和1個選檔傳感器以及1個換檔傳感器。
聯軸器是傳遞EMT電機和負載電機轉矩的機械部件,其在試驗過程中通常工作在高速轉動環境下,為了保證試驗人員與臺架系統的安全,避免聯軸器斷裂與甩出等危險,兩個電機需要保持嚴格對中。
完成控制模型離線仿真后,進行整車快速控制原型開發,實際輸入、輸出信號將由I/O接口與dSPACE系統進行關聯。EMT電機控制器、負載電機控制器、高壓電池BMS、dSPACE系統通過CAN總線組成一個CAN網絡,dSPACE讀取EMT電機、負載電機、高壓電池的信息并通過報文控制三個子系統;油壓傳感器、選檔傳感器、換檔傳感器、輪速傳感器均由ADC讀入其電信號,針對選檔傳感器、換檔傳感器、輪速傳感器存在數據波動較大的問題,在其信號讀入后對其進行平均值濾波處理,以增強信號的可用性;輸出信號包括油泵、選1電磁閥、選2電磁閥、換1電磁閥、換2電磁閥、EMT控制報文、負載電機控制報文等。
1.3 數據采集及控制系統
在保證臺架安全、穩定運行的前提下,為了使得臺架自動化控制程度較高,以及具備高效、便捷的采集試驗數據能力,根據實際需求,本文從實時監控、數據采集以及故障診斷等方面出發,使用dSPACE平臺建立了臺架監控與數據采集系統[9-11]。
基于dSPACE開發換檔快速控制原型時,主要采集換檔過程中EMT電機和負載電機轉速變換情況、當前的檔位位置,選(換)檔傳感器信號、在換檔過程中退檔、選檔、調速、進檔4個過程所占據的時間以及4個電磁閥的狀態。
Control Desk是dSPACE提供的集監控、控制以及實時仿真于一體的交互式控制軟件,用戶只需要拖動其內部配置好各種虛擬儀器、儀表,并與需要監控或者控制的參量關聯即可進行顯示與實時控制,除了如數字顯示器、旋鈕、滑動條、多參數多維度曲線等基本儀表外,其針對汽車行業開發了專業的儀表導航,此外軟件還擁有強大的數據記錄與曲線回放等功能。進行快速控制原型試驗時所建立的數據采集系統如圖3所示。

圖3 快速控制原型數據采集系統Fig 3 Rapid control prototype data acquisition system
測試過程中Control Desk軟件為用戶提供了實時仿真以及實時采集試驗數據兩種工作模式,兩者都能進行實時仿真與試驗過程的回放,區別在于后者能夠保存試驗數據并能導入到Office或者Matlab等外部環境中進行分析。
2 混合動力汽車建模
2.1 駕駛員模型
駕駛員模型是前向仿真中特有的,本文進行混合動力系統前向仿真時,駕駛員模型主要根據實際車速與目標車速的差值模擬駕駛者對汽車進行相應操作(加速或者制動),控制目標是使得實際車速與目標車速盡量接近。
駕駛員模型使用PI控制器,其難點在于參數整定(參照參數整定方法,結合整定后輸出效果,經過反復調試得到PI參數)。所建立的駕駛員模型如圖4所示,輸入目標車速v與真實車速v_real,輸出踏板開度pedal,踏板開度限制輸出范圍在-100~100,0~100 表示加速踏板開度,-100~0 則表示制動踏板開度。

2.2 EMT模型
變速器通過改變傳動比實現汽車在不同環境下對牽引力的需求,此外還可實現系統倒車和中斷動力傳遞等功能,EMT將驅動電機集成到自動變速器內,換檔時實現主動調速以提高換檔品質。本文EMT系統設置有4個前進檔、一個倒檔,檔位通過齒輪組和離合器的組合實現動力傳遞路線的選擇,檔位確定時控制該檔位上的離合器結合傳遞轉矩,當所有離合器均未結合時系統處于空檔位置,所建立的EMT模型如圖5所示。
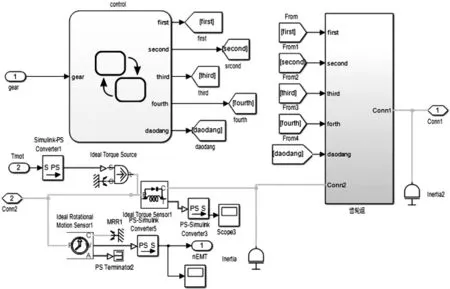
圖5 混合動力汽車EMT模型Fig.5 Driver model
2.3 其他模型
發動機模型和電機模型由試驗所得的轉矩-轉速-效率特性曲線通過查表得到。電池模型由試驗所得的充放電特性曲線得到。傳動系統模型根據輸入力矩和檔位信號,通過速比查表和效率查表,經過計算后得到并輸出車輪轉矩。根據汽車動力學方程構建整車模型,從而計算車速。與儀表顯示模塊可描述模型的數據輸入、輸出通道,將模型輸出量及外部輸入量通過儀表盤等直觀地顯示在監控界面上并進行儲存。
3 混合動力系統實時仿真試驗
本文采用的是基于確定規則的控制策略[12-15],確定規則控制策略的思想是根據發動機和電機的特性,其優點是控制策略思路清晰、算法簡單、計算量小,也是第一種應用在商品化混合動力汽車的控制策略。
進行換檔快速控制原型試驗時,在試驗正常、安全操作的要求下,對上電順序有嚴格的要求,遵守先低壓后高壓的上電原則:①將各類傳感器、油泵、電池低壓系統、負載電機控制器低壓部分、電池開關、dSPACE系統完成接線;②穩壓電源給傳感器低壓上電、油泵上電、電池低壓系統上電,水泵開啟;③向高壓電池BMS發送高壓上電命令,負載電機控制器上電;④負載電機預充電(防止瞬間電流過大損壞器件);⑤負載電機、EMT電機上高壓電,開始試驗。
在Control Desk軟件中將 Start軟開關置 1,EMT電機定轉矩運行,調節負載電機轉速,進行換檔試驗,選擇測量模式實時顯示系統的運行狀態,選擇記錄模式系統完整保存試驗數據。
圖6、圖7分別表示了檔位從一檔升到二檔、二檔退到一檔以及從三檔退到二檔再退到一檔過程中負載電機和EMT電機轉速-時間變化曲線,從圖中可以發現隨著負載電機轉速逐漸升高,EMT電機轉速也相應增大,當轉速滿足換檔條件時,EMT轉速調整,檔位進行切換,圖中EMT電機轉速存在兩次迅速變化的時刻 (升檔時EMT電機轉速降低,降檔時轉速升高),該時間段即為換檔過程中EMT電機主動調速的階段。
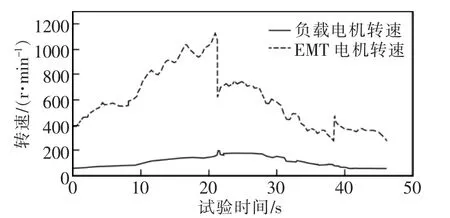
圖6 一換二、二退一轉速變換曲線Fig.6 One to two and two to one speed conversion curve
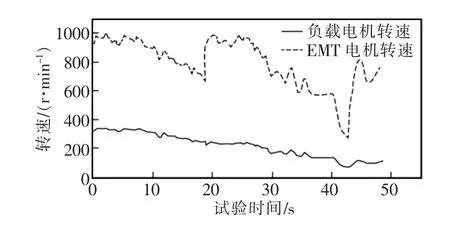
圖7 三退二、二退一檔轉速變換曲線Fig.7 Speed change curve of three back and two back two files
換檔過程具體分為退空檔、選檔、調速與進檔等過程,每個過程的具體時間可以從電池閥的上電情況分析得到,圖8分析了從三檔退二檔時各個電磁閥的上電情況(圖中為了區別顯示各個電磁閥狀態,將電磁閥輸出的信號分別乘以1、1.5、2和2.5的比例系數以便分析):執行退空檔命令時換檔電磁閥1、2置位,從圖中可以看出退空檔時間大約在100 ms;確定退空檔完畢后即可進行選檔操作,選檔電磁閥1、2置位,選檔所用時間較短,大約在50 ms;選檔結束后EMT隨即進行主動調速操作,從三檔退到二檔時變速器輸入軸轉速需要升高,即圖7中EMT轉速變化曲線第一次迅速上升部分,待轉速差小于設定閾值,調速完成并立刻進行進檔操作,本次調速時間大約在150 ms左右;換檔電磁閥1置位,換檔電磁閥2復位,執行進二檔操作,從圖中可以看出進檔時間約100 ms,三檔退二檔總時間在400 ms以內。此外一、二檔,三、四檔之間切換時因為選檔過程在退空檔后隨即完成,即不存在選檔時間,換檔時間會進一步縮短到350 ms以內。

圖8 換檔過程中電磁閥狀態Fig.8 Solenoid valve state during gear shifting
在進行EMT換檔試驗時,分析換檔的4個過程,多次試驗發現退檔、選檔、進檔時間相對穩定,波動范圍不大,而主動調速過程時,不同檔位之間切換存在較大差異,升檔與降檔過程中也存在較大波動。表3顯示了多次試驗過程中調速過程所用的時間,從調速時間來看,升檔與降檔過程中調速時間相差較大,在減速升檔時調速時間較短,而在升速降檔時其調速時間遠遠超過其在升檔時所用時間。

表3 各檔位切換所用調速時間Tab.3 Timing speed for each gear shift
EMT電機控制器自帶的調速方法是控制器接收到調速指令后內部進行轉矩輸出從而調整轉速到目標值,從表3的調速時間來看,調速時間并不是非常理想,特別是在降檔時時間相對較長。本文使用PI控制器,在電機有調速需求時,主動發送轉矩命令使得電機轉速達到目標轉速,所用PI控制器轉矩計算如式1所示:

式中:u(t)為輸出的轉矩命令值;e(t)為實際角速度與目標轉速下角速度的差值;kP、TI為比例與積分系數,同樣參照參數整定方法,本文選定的kP、TI參數分別為0.56與0.8,使用PI控制器再次進行換檔試驗,所得到的換檔過程中主動調速時間如表4所示。
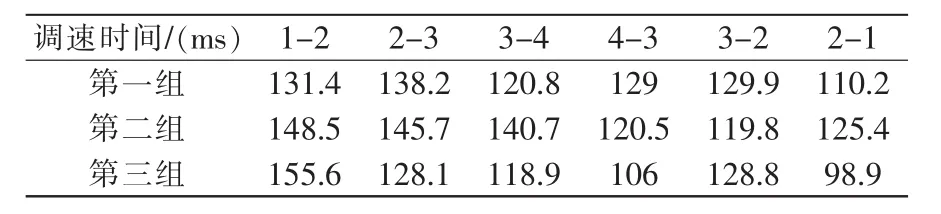
表4 PI控制所用調速時間Tab.4 Timing of PI control
表5使用做差法對比了使用自建PI調速控制策略與原始控制策略在各個檔位切換過程中的調速時間,結果表明使用自建PI控制策略進行調速時在降檔過程中能夠明顯的縮短調速時間,而在升檔過程中則控制效果并不理想,調速時間反而增加,據此,在EMT最終的換檔控制策略中,采用了分段控制的方法,即在系統升檔時直接發送轉速命令來實現調速,而在降檔時則采用所建的PI控制器通過發送轉矩命令使得EMT轉速快速接近目標轉速,使用自建的降檔PI控制器對調速時間進行了優化,從而使得系統在升、降檔過程中均能有較好的換檔效果。從換檔時間來看,所建的EMT換檔控制策略達到預期的控制目標,縮短了換檔過程導致的動力中斷時間,擁有較好的換檔品質。

表5 PI控制與原始控制調速時間對比Tab.5 Comparison of timing between PI control and original control
4 結語
本文在傳統汽車實驗臺基礎上搭建混合動力半實物仿真平臺,利用dSPACE/Simulink作為開發調試平臺能方便快捷地構建混合動力汽車控制策略,并且將控制算法在實時硬件平臺上實現。基于dSPACE的混合動力汽車半實物仿真平臺能實現大部分混合動力汽車的實驗并具有良好的運行效果,提高了試驗結果的可靠性,大大縮短混合動力汽車控制策略的開發周期,驗證了混合動力半實物仿真平臺的功能。
[1]韋作高,劉振軍,葉明,等.基于dSPACE的混合動力實驗臺系統開發研究[J].重慶交通大學學報:自然科學版,2008,27(3):470-473.
[2]王熠,何洪文,張穎琦,等.基于CAN網絡的混合動力汽車硬件在環仿真平臺[J].北京理工大學學報,2011,31(5):524-527.
[3]石琦文,孫曉民.基于MATLAB的車用快速控制原型軟件平臺的研究與實現[J].計算機工程與應用,2005,41(13):108-110.
[4]馬培蓓,吳進華,紀軍,等.dSPACE實時仿真平臺軟件環境及應用[J].系統仿真學報,2004,16(4):667-670.
[5]張晉東.基于dSPACE的混合動力汽車AMT電機控制系統[D].吉林:吉林大學,2006.
[6]鄧冠豐.dSPACE系統在整車控制器開發上的應用[J].機電技術,2013(2):80-82.
[7]黃華,楊樺,劉穎.基于dSPACE的氣動AMT系統快速原型開發[J].微計算機信息,2010,26(22):27-29.
[8]張奇.基于V模式的dSPACE電機控制器開發[J].實驗室研究與探索,2014,33(11):141-144.
[9]崔濤.基于模型的自動變速箱數據采集系統[J].北京理工大學學報,2008,28(5):392-396.
[10]桂勇,駱清國,張更云,等.基于dSPACE的發動機信號實時采集系統開發[J].裝甲兵工程學院學報,2010,24(3):32-34.
[11]孫仲立.基于Labview的EMT變速器試驗臺架的研究[D].武漢:武漢理工大學,2012.
[12]杜玖玉,王賀武,黃海燕.基于規則的混聯式混合動力系統控制策略[J].農業工程學報,2012,28(S1):152-157.
[13]Dextreit C,Kolmanovsky I V.Game theory controller for hybrid electric vehicles[J].IEEE Transactionson Control Systems Technology,2014,22(2):652-663.
[14]曹正策.基于電驅動自動變速器(EMT)的Plug_in并聯混合動力系統研究[D].武漢:武漢理工大學,2011.
[15]謝海明,黃勇,王靜,等.插電式混合動力汽車能量管理策略綜述[J].重慶理工大學學報,2015,29(7):1-9.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
