工程機械臂系統結構動力學及特性分析
2018-03-30 02:53:04梁玉強
現代制造技術與裝備 2018年4期
梁玉強
(太原學院,太原 030000)
現代工業技術發展快速,社會生產規模越來越大,自動化程度越來越高,在整個生產過程中,工程機械臂的應用至關重要。在控制技術、計算機技術及傳感器技術日漸成熟的背景下,工程機械臂呈現出精密化、智能化的發展趨勢,這就給工程機械臂的設計提出了更高的要求,人們需要全面分析工程機械臂系統結構動力學及特性,以此來為設計實踐提供依據。
1 工程機械臂系統結構動力學分析
1.1 多體系統動力學
從本質上來講,工程機械臂系統屬于一種多體系統,這就需要對多體系統動力學進行分析[1]。多體系統動力學以多體系統運動規律為主要研究對象,主要包括多柔體系統動力學和多剛體系統動力學兩個方面,二者之間有著密不可分的關系,具體如圖1所示。
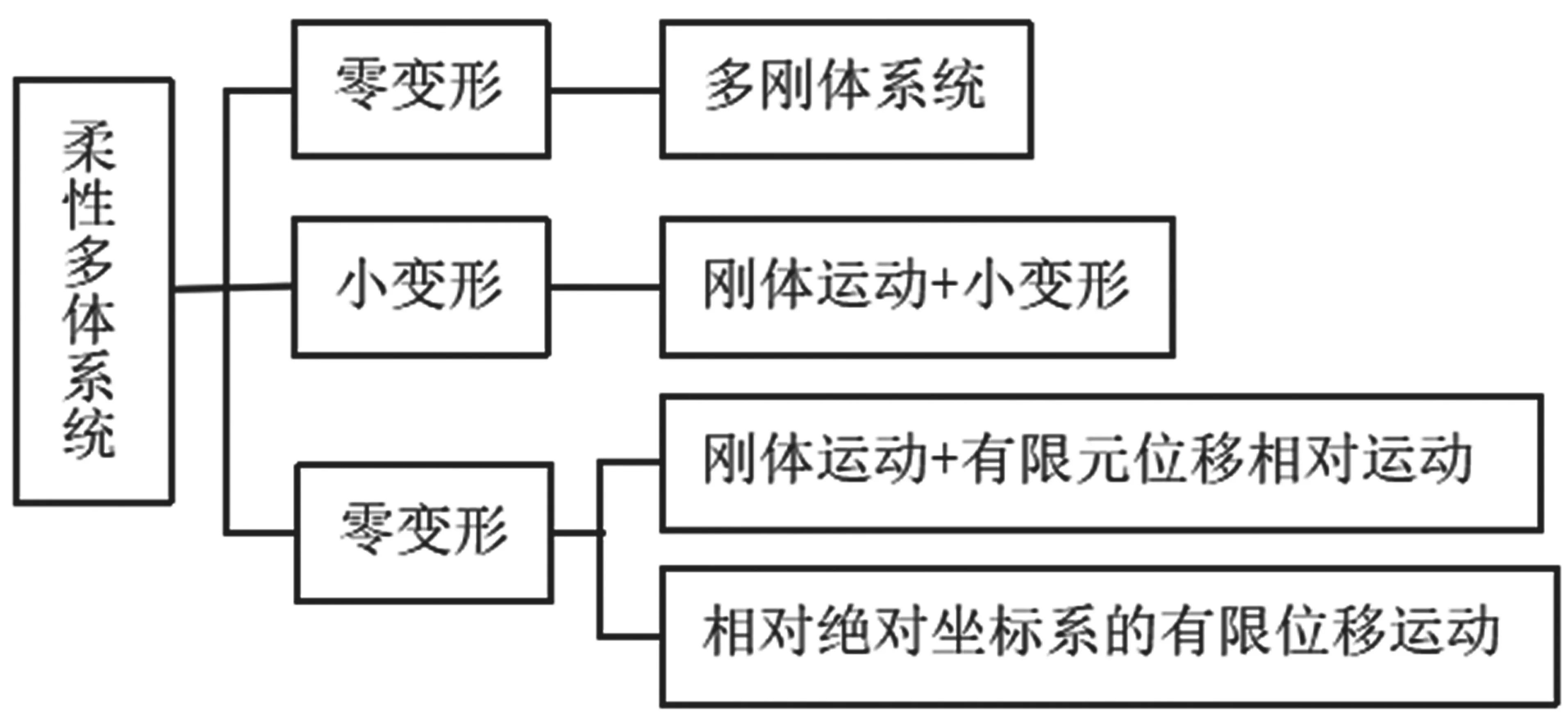
圖1 多剛體系統與多柔體系統關系
目前,國內外對多剛體系統動力學研究較為成熟,形成了完善的理論體系,但對于多柔體系統動力學的研究還處于起步階段,相關計算方式及模型建立等還有待探索,尤其對于結構復雜性較高的柔性體系來說,其模型建立、計算求解公式等方面存在諸多問題[2]。多柔體系統動力學建模有著較高的復雜度,對于相關求解方程式的精準度也有著較高的要求。而機械臂屬于一種復雜的機械結構,在進行動力學及特性分析的過程中,還難以有效應用多柔體系統動力學建模方式,需要進一步深入研究。
1.2 工程機械臂
在整個工程機械系統中,工程機械臂扮演著重要的角色,工程機械臂的設計質量與工程機械整體性能有著密不可分的關系。就目前來看,對工程機械臂的研究主要集中在兩個方面。
一是對工程機械臂系統動力學微分方程建模的相關研究。工程機械臂屬于多體系統,在建模的過程中,需要采用多體動力學方式,以拉格朗日理論為基礎,在廣義坐標系中建立其挖掘機結構運動模型簡圖,建立機械臂力學模型,以此來為分析機械臂中相關運動分析奠定基礎。
二是對工程機械臂動力學仿真的相關研究,以動力學分析軟件或數值求解方法為基礎,進行工程機械臂的仿真。當前較為常用的仿真軟件有MATLAB軟件、ADAMS軟件等,通過對工程機械臂的仿真來分析其動力學特性。
2 工程機械臂系統結構動力學特性研究
2.1 工程機械臂運動分析
工程機械臂主要用于挖掘機之上,而挖掘機在開采工程、土建施工等領域應用廣泛,機械臂的性能一定程度上能夠反映整個工程機械設計水平,本文以單斗反鏟液壓挖掘機為例,簡要分析工程機械臂的運動情況。
動臂、鏟斗、斗桿、液壓缸及液壓控制系統等是挖掘機的主要工作部分,在工作的過程中,液壓控制系統啟動,動臂液壓缸會產生壓力,動臂在液壓缸壓力的作用下圍繞著鉸點進行轉動,斗桿液壓缸也會產生壓力,斗桿在壓力作用下則會圍繞鉸點做上下擺動,以此來將鏟斗鉸接到斗桿之前,鏟斗液壓缸產生壓力,配合搖桿與連桿驅動,在聯合作用下,鏟斗圍繞著鉸點轉動[3]。單斗反鏟液壓挖掘機的工程機械臂系統屬于多體系統,在工作范圍內,能夠實現任何角度的旋轉,操作靈活,使用方便,適用范圍廣泛,通過機械臂的運動來完成挖掘工作,在工作的過程中,工程機械臂的受力情況與運動情況較為復雜,動力學特性與其工作性能和挖掘水平息息相關。
2.2 工程機械臂系統結構優化
在工程機械結構設計與研究領域,結構優化設計一直備受關注,研究實踐表明,即使機械結構強度達到或超過設計標準,其在實際工作的過程中,受到工作環境、使用強度及使用年限等因素的影響,也難免會出現結構性損傷與破壞,因此,對機械機構進行動態優化設計是十分重要的。在工程機械臂系統設計方面,結構動態優化的應用日漸廣泛,這得益于各種模擬技術和設計技術的進步。
工程機械臂的工作環境較為惡劣,結構運動較為復雜,有著較高的工作負荷和運動強度,因此經常會出現一些故障和問題。利用動態優化設計方式可以優化工程機械臂系統結構,通過模擬仿真進行工程機械臂的動力學分析,研究其動力學特性。在此基礎上,人們可以找出需要優化的結構部位,建立工程機械臂結構優化目標函數,并利用增廣拉格朗日乘子法對優化目標函數進行求解,以此為依據即可開展工程機械臂的優化設計,改善其工作性能,從而降低使用過程中的故障概率。
工程機械臂動態優化方法較多,其中典型方法為有限元分析動態法,有限元與優化算法的結合能夠節省優化開發時間,提升優化設計效率。有限元分析的應用能夠有效滿足工程機械臂零部件應力分布需求,利用結構優化技術來優化設計尺寸[4]。但需要注意的是,這種方法在實際應用的過程中會受到商業軟件的限制,需要積極發展有限元軟件技術,提升優化設計精度和優化可靠性。此外,基于BP神經網絡的優化方法也逐步被應用起來,其非線性映射能力較強,能夠自動模擬工程機械臂動態特性之間的函數關系,其采用遺傳算法來進行最優化設計,能夠改善工程機械臂的動態特性,優勢較為明顯。
3 結論
工程機械臂的設計質量直接關系整個機械的性能,對工程機械臂系統結構動力學及特性的分析能夠為結構設計提供依據。同時,對工程機械臂的優化設計也至關重要,其中有限元分析優化、基于BP神經網絡優化等優化方法效果良好,值得推廣和應用。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
商品與質量(2021年43期)2022-01-18 05:27:58
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
表面工程與再制造(2019年1期)2019-12-04 15:10:07
汽車觀察(2018年9期)2018-10-23 05:46:44
專用汽車(2015年1期)2015-03-01 04:04:39
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
