基于粒子群優(yōu)化的卡爾曼濾波去耦算法
2018-04-03 03:46:50陸志毅李相平鄒小海
系統(tǒng)工程與電子技術(shù) 2018年4期
陸志毅, 李相平, 陳 麒, 鄒小海
(海軍航空工程學(xué)院電子信息工程系, 山東 煙臺 264001)
0 引 言
隨著作戰(zhàn)的電子環(huán)境日趨復(fù)雜,捷聯(lián)導(dǎo)引頭技術(shù)受到各個軍事強國的重視。捷聯(lián)導(dǎo)引頭相比于傳統(tǒng)的導(dǎo)引頭具有可靠性高、質(zhì)量輕以及彈體過載信息不敏感[1]等優(yōu)勢,尤其是相控陣?yán)走_導(dǎo)引頭。近年來,美國戰(zhàn)略防御局、英國的Qinetiq公司以及意大利的Matra Bae Dynamics Alenia (MBDA)公司都在積極地攻克相控陣?yán)走_導(dǎo)引頭彈體姿態(tài)擾動和波束指向耦合的難題[2]。針對相控陣?yán)走_導(dǎo)引頭去耦的問題,文獻[3]分析了波束角指向誤差斜率的特性,并提出了基于波束角誤差補償?shù)慕怦钏惴?文獻[4-5]根據(jù)波束指向在慣性坐標(biāo)系下不變的原理,提出了通過坐標(biāo)轉(zhuǎn)換的關(guān)系實時保持波束穩(wěn)定的算法;文獻[6-10]研究了卡爾曼濾波器在相控陣?yán)走_導(dǎo)引頭去耦以及彈目視線角速率提取上的運用,但是在濾波過渡的過程中,由于導(dǎo)引頭前向通道增益系數(shù)Ks和波束控制增益系數(shù)Kg刻度尺度不同帶來的隔離度問題,會引起整個制導(dǎo)系統(tǒng)的不穩(wěn)定,使得提取的視線角速率誤差過大。
由于制導(dǎo)系統(tǒng)是一個非線性、連續(xù)的系統(tǒng),在建立卡爾曼濾波方程的時候,可以根據(jù)擴展卡爾曼濾波(extended Kalman filter, EKF)采用泰勒級數(shù)展開一階近似的方法將非線性系統(tǒng)線性化的基本思想[11]進行處理,然后把連續(xù)型卡爾曼濾波方程離散化即可。
本文提出了一種粒子群優(yōu)化的卡爾曼濾波去耦算法,對于導(dǎo)彈制導(dǎo)回路中的非線性系統(tǒng)參數(shù),采用EKF進行處理,根據(jù)狀態(tài)方程和量測方程獲得最小均方差意義下的最優(yōu)估計[12]。同時為了減小Ks和Kg帶來的影響,利用粒子群優(yōu)化算法不斷對Ks和Kg值進行調(diào)整,使得經(jīng)過濾波后的估計值達到最優(yōu)值。最后通過仿真實驗對比了優(yōu)化后的彈目視線角速率提取值誤差和未優(yōu)化的提取值誤差,以及優(yōu)化后算法和當(dāng)前主流的波束誤差補償算法的誤差值。表明了所提算法可以克服Ks和Kg帶來的誤差量過大問題,并且驗證了算法在相控陣?yán)走_導(dǎo)引頭上去耦的有效性。
1 粒子群優(yōu)化的EKF去耦算法原理
EKF可以根據(jù)系統(tǒng)每個時刻的量測值和濾波參數(shù),通過量測方程和狀態(tài)方程進行時間更新和量測更新,進而得到該系統(tǒng)狀態(tài)的后驗估計值。同時用粒子群算法修正輸入的增益參數(shù)Ks和Kg,直至輸出的結(jié)果滿足適應(yīng)度函數(shù)條件,即為最優(yōu)的估計值。圖1為整個去耦算法的原理框圖。
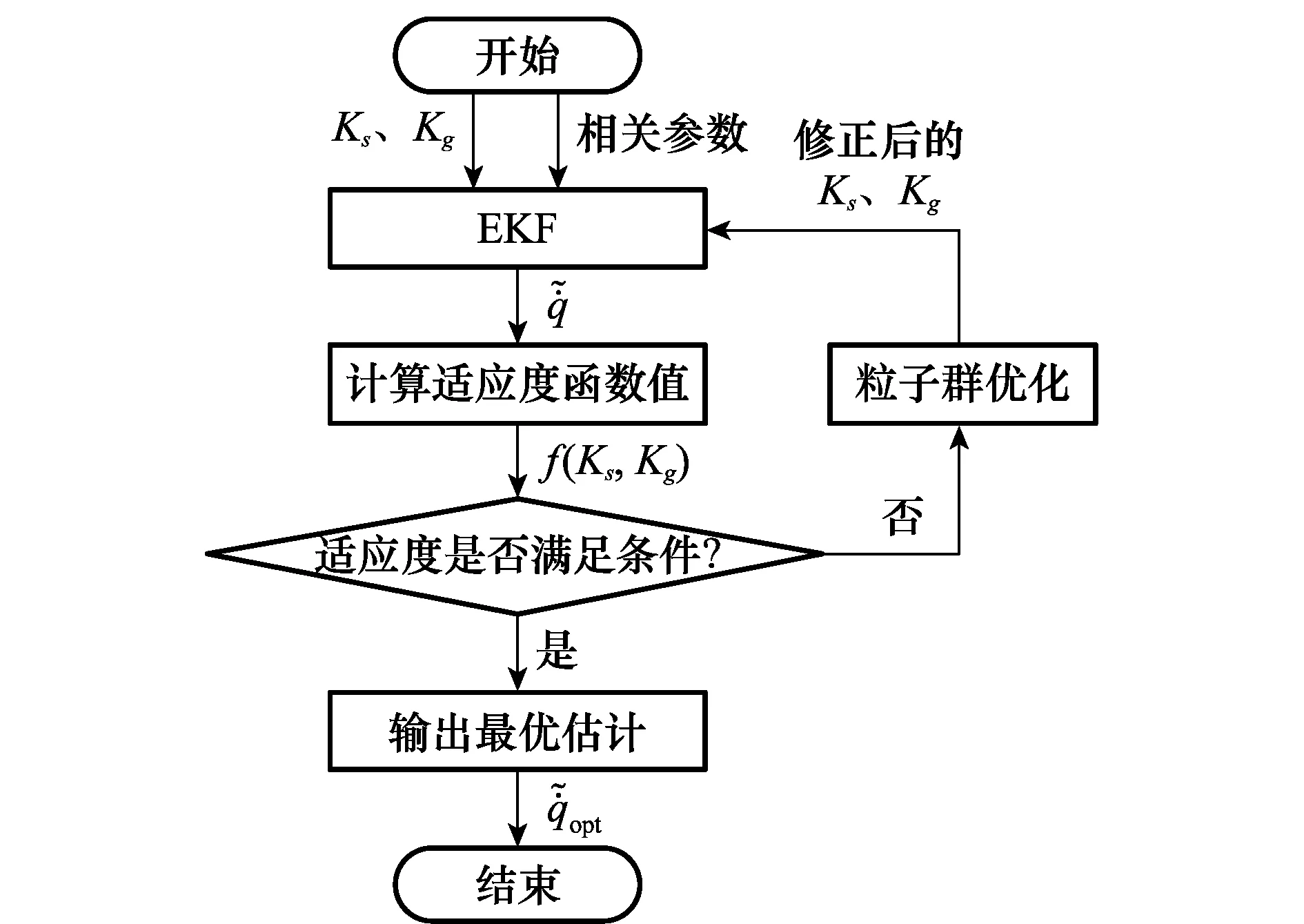
圖1 粒子群優(yōu)化的EKF去耦算法原理框圖

2 粒子群優(yōu)化EKF去耦算法的實現(xiàn)
2.1 粒子群優(yōu)化算法
粒子群優(yōu)化是由Kennedy和Eberhart基于一種社會心理學(xué)模型中的社會影響和社會學(xué)習(xí)而提出的。其仿真模型是要模擬鳥群在捕食過程中,避免碰撞,通過團體的協(xié)作,不斷調(diào)整自己的飛行軌跡向最優(yōu)位置靠近的行為[13]。針對問題中提到優(yōu)化增益參數(shù)Ks和Kg,可以用每個粒子代表一個2維空間的候選解,選擇合適的適應(yīng)度函數(shù),計算各個粒子的適應(yīng)度,并按照式(1)和式(2)來不斷地迭代和更新自己的速度和位置。
vij(t+1)=ωvij(t)+c1r1j[pbest-xij(t)]+
c2r2j(t)[gbest-xij(t)]
(1)
xij(t+1)=xij(t)+vij(t+1)
(2)
式中,vij和xij分別是粒子i在第j維上的速度和位置;pbest為粒子i遍歷后在空間搜索的個體最優(yōu)位置;gbest是所有粒子目前為止搜索到的全局最優(yōu)位置;t表示當(dāng)前的時間;c1和c2相當(dāng)于粒子的加速度,一般取正數(shù);r1,j和r2,j是區(qū)間[0,1]之間的隨機數(shù),主要是把不確定的因素迭代到算法中,增大算法的隨機性;ω為慣性權(quán)重,用來衡量上個時刻的速度對于粒子下次運動的影響。
在粒子群優(yōu)化算法中一個重要的指標(biāo)就是適應(yīng)度函數(shù),其不僅可以約束粒子的運動,還能有效地作為目標(biāo)函數(shù)終止粒子的更新[14]。如果選擇的不合適可能會導(dǎo)致算法早熟收斂,使得結(jié)果陷入局部最優(yōu)解,最后通過EKF后達不到最優(yōu)的狀態(tài)后驗估計值。結(jié)合EKF的目的是要減小測量過程中的觀測噪聲影響[15],可以將真實值和濾波后的估計值之間的均方誤差作為適應(yīng)度函數(shù),記作
(3)
2.2 EKF去耦算法過程實現(xiàn)
對于卡爾曼濾波而言,可以從與被提取信號相關(guān)的量測信號中應(yīng)用算法對需要的信號做出最優(yōu)估計。其處理的對象一般是由高斯白噪聲引起的隨機響應(yīng),并且系統(tǒng)的白噪聲和量測過程中的白噪聲不是卡爾曼濾波濾除的對象。實質(zhì)上相當(dāng)于一整套遞推的算法,在一個濾波周期內(nèi)主要包含了時間更新和量測更新的過程,其計算回路和更新過程的框圖如圖2所示。
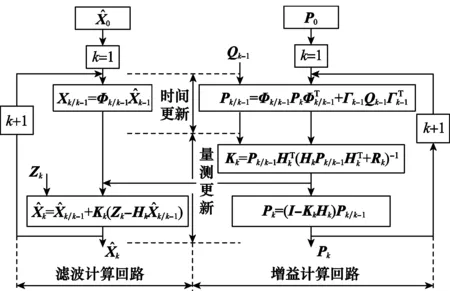
圖2 卡爾曼濾波的計算回路和更新過程
根據(jù)圖3所示相控陣?yán)走_導(dǎo)引頭制導(dǎo)跟蹤回路,可以選取合適的狀態(tài)變量和量測量,寫出EKF的基本濾波方程,從而建立EKF去耦算法的模型。

圖3 相控陣?yán)走_導(dǎo)引頭制導(dǎo)跟蹤回路

為了達到去耦和提取彈目視線角速率的目的,可以選擇式(4)系統(tǒng)變量作為狀態(tài)變量。
(4)
系統(tǒng)的量測量選取為
(5)
該系統(tǒng)的系統(tǒng)方程和量測方程為

Z(t)=H(t)X(t)+v(t)
(6)
其中
(7)
對式(8)進行離散化處理,取步長為Δt,進而得到狀態(tài)轉(zhuǎn)移矩陣為
Φk/k-1=I+F(t)Δt=
(8)
根據(jù)圖3系統(tǒng)變量之間的關(guān)系,可以計算出
(9)
離散化處理后量測矩陣為
(10)

(12)

3 粒子群優(yōu)化的EKF去耦算法驗證
3.1 粒子群優(yōu)化的作用
導(dǎo)引頭前向通道增益Ks和波束控制增益Kg作為相控陣導(dǎo)引頭制導(dǎo)控制回路中影響EKF估計彈目視線角速率的重要參數(shù),對這兩個參數(shù)進行粒子群優(yōu)化組合,可以極大地提高后驗估計值的精度。并且將優(yōu)化后的參數(shù)組合作為工業(yè)生產(chǎn)時的一個重要參考標(biāo)準(zhǔn),可以適當(dāng)減小導(dǎo)彈姿態(tài)擾動對波束指向的影響。
3.2 仿真結(jié)果與性能分析
運用粒子群優(yōu)化參數(shù)的一個重要參考就是適應(yīng)度,在本算法中優(yōu)化參數(shù)是二維的,所以所選粒子的維數(shù)也為2,分別表示Ks和Kg。考慮到彈上嵌入式計算機的工作能力,為了防止粒子數(shù)選取過大帶來的計算時長問題,粒子數(shù)取40,一定程度上既能保證不陷入局部最優(yōu),也能使計算時間控制在一個能夠接收的范圍[16-17]。由于在本算法中選取的適應(yīng)度函數(shù)表示均方誤差值,典型的線性遞減慣性權(quán)重在初期雖然全局的搜索效果很好,但是隨著其值的減小容易陷入局部最優(yōu),不利于尋找最優(yōu)解[18-19],所以選取固定的慣性權(quán)重值,參考文獻[20-21]推薦的固定權(quán)重ω1=0.6。在加速度因子選取上主要參考文獻[22]給出的常數(shù)值c1=c2=1.5。算法最大迭代次數(shù)為500次,避免因為沒有找到最優(yōu)解而陷入死循環(huán)。在導(dǎo)彈跟蹤的過程中,為了可以有效地輸出視線角速率信息,提高導(dǎo)彈的命中精度,需要控制俯仰方向上的角速率誤差幅值在0.05°/s以內(nèi),偏航方向上的誤差幅值在0.1°/s以內(nèi),此時對應(yīng)的適應(yīng)度值約為0.006 4,所以可將適應(yīng)度滿足條件設(shè)定為不超過10-3。EKF算法中功率譜取Sw1=Sw2=0.002 W/Hz,Sv=0.03 W/Hz時,對Ks和Kg的適應(yīng)度進行仿真,圖4為適應(yīng)度與迭代次數(shù)的曲線圖。
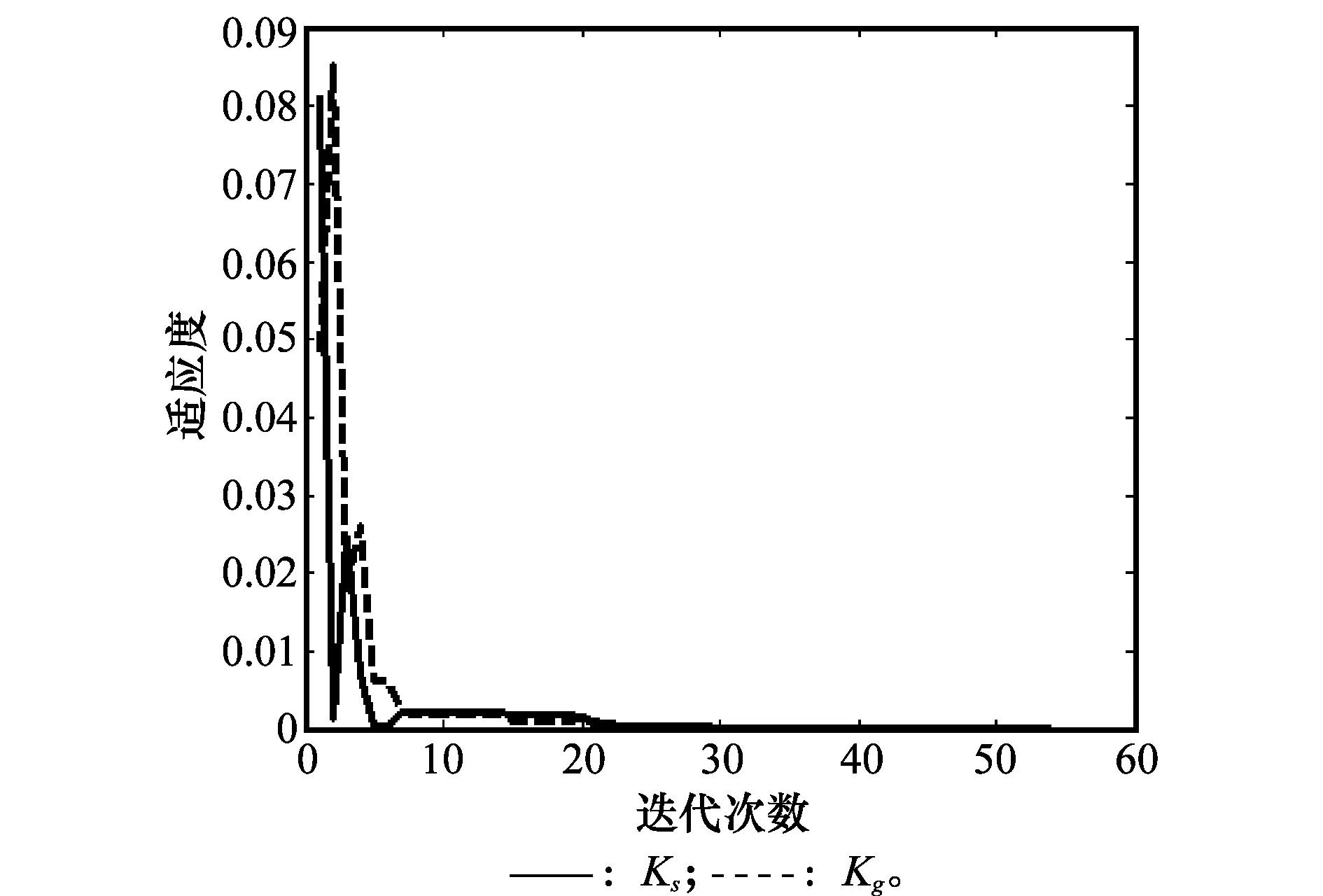
圖4 適應(yīng)度與迭代次數(shù)曲線圖
可見當(dāng)粒子群迭代到23次左右時,Ks和Kg的值達到符合條件的最優(yōu)解,此時的適應(yīng)度約為6.001 24×10-4,其實際的意義就是經(jīng)過EKF濾波后真實值與估計值的均方差值,表明此時所得到的估計是最優(yōu)的后驗估計值。其對應(yīng)的Ks和Kg值分別為10.863和1.024,考慮到工業(yè)設(shè)計的實際,取前向通道增益Ks為10,波束控制增益Kg為1。計算此時的適應(yīng)度值為6.113 25×10-4,與調(diào)整前的適應(yīng)度誤差在10-3~10-4,由于適應(yīng)度滿足的條件為不超過10-3,所以調(diào)整后的值是可取的。
確定濾波參數(shù)Ks和Kg后,通過EKF進行去耦和視線角速率的提取。由于在實際的導(dǎo)彈飛行中滾動姿態(tài)趨于穩(wěn)定,因此在仿真時不考慮滾動角帶來的影響。設(shè)定仿真條件為
式中,φ、?、γ分別是導(dǎo)彈姿態(tài)的俯仰角、偏航角和滾動角;qy和qz是真實的俯仰方向和偏航方向的彈目視線角;fm一般取3 Hz。
選取兩個增益Ks和Kg分別為10和1,經(jīng)過EKF濾波后提取俯仰和偏航兩個方向的視線角速率,計算此時的誤差值,給出粒子群優(yōu)化EKF去耦算法估計誤差值圖,如圖5所示。同時在Ks=20,Kg=1.1的條件下得到常規(guī)EKF視線角速率提取值誤差圖如圖5所示。在相同的仿真條件下給出當(dāng)下主流的波束誤差補償去耦算法的誤差值圖,如圖5所示。對比波束誤差補償算法的誤差值和粒子群優(yōu)化后EKF去耦算法的誤差值發(fā)現(xiàn),在相控陣?yán)走_導(dǎo)引頭去耦上,優(yōu)化后的算法更具有優(yōu)勢。
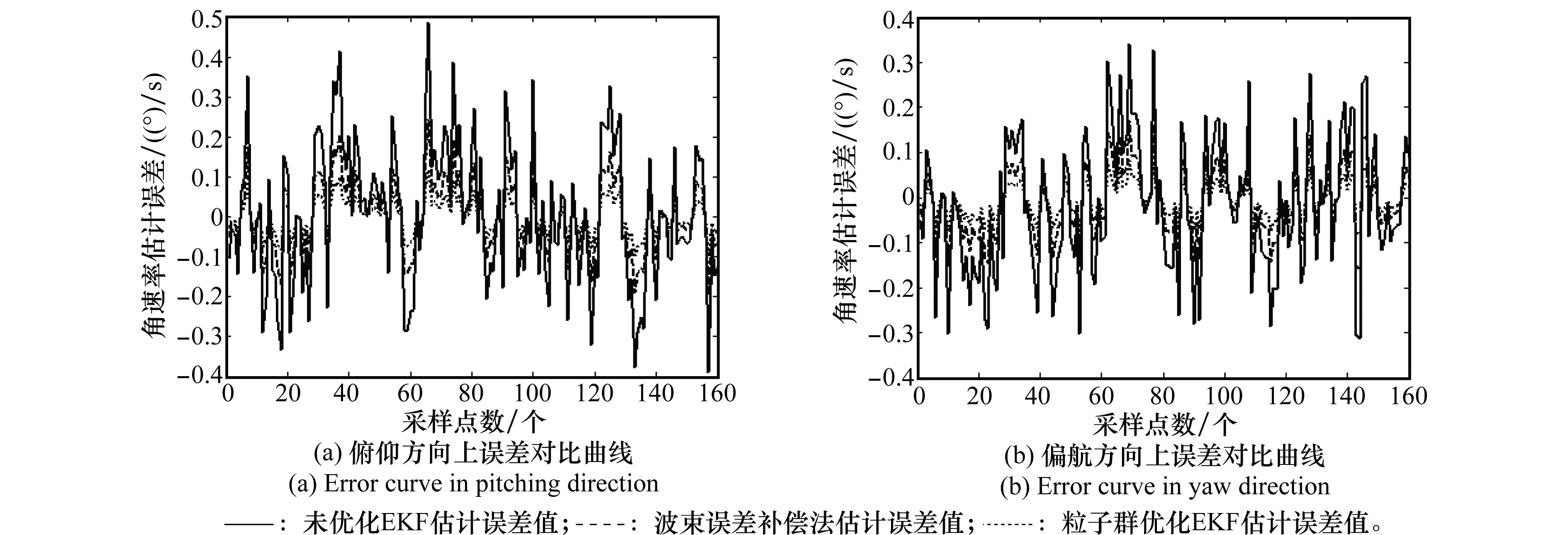
圖5 3種算法視線角速率提取值的誤差曲線
為了更清晰地表征算法的優(yōu)良性,表1給出了Ks=10時不同Kg對各誤差以及適應(yīng)度的影響情況,表2給出了Kg=1時不同Ks對各誤差以及適應(yīng)度的影響情況。
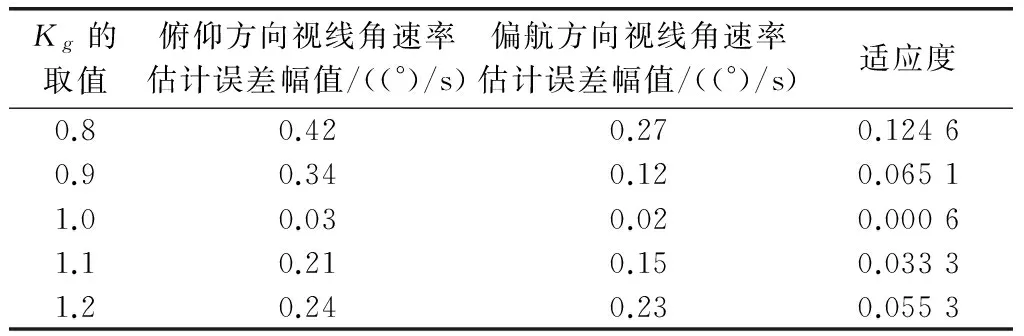
表1 Ks=10時不同Kg對各誤差以及適應(yīng)度的影響情況
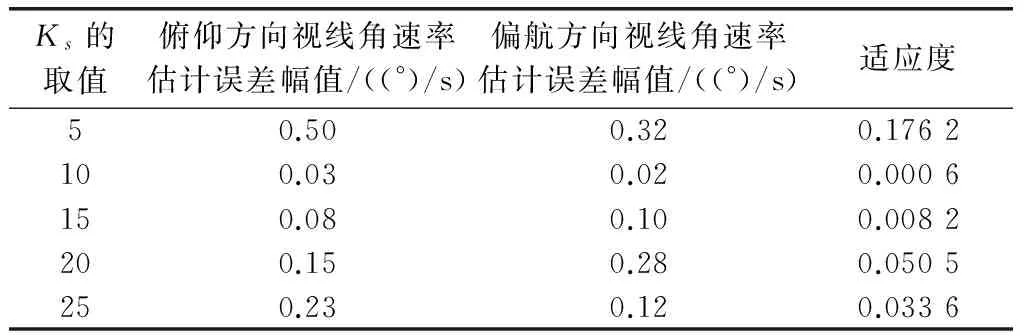
表2 Kg=1時不同Ks對各誤差以及適應(yīng)度的影響情況
由圖5可知,雖然常規(guī)的EKF去耦算法在提取視線角速率上擬合性較好,但是沒有粒子群優(yōu)化后的EKF算法的精度高。尤其是通過表1和表2對比發(fā)現(xiàn),不同的Ks和Kg組合所導(dǎo)致提取視線角速率的誤差值和適應(yīng)度也相差很大,可以認為Ks和Kg是不相關(guān)的兩個增益參數(shù)[23],因此當(dāng)Ks=10和Kg=1時,EKF提取值效果最好,同時也驗證了粒子群優(yōu)化得到參數(shù)的準(zhǔn)確性。
4 結(jié) 論
首先通過粒子群優(yōu)化的EKF算法對導(dǎo)引頭前向通道增益Ks和波束控制增益Kg進行優(yōu)化組合,然后進行濾波,使得視線角速率的提取值誤差控制在一個較小的范圍內(nèi),不僅有效地解決了因Ks和Kg取值不當(dāng)引起誤差值過大的問題,而且提高了彈目視線角速率提取值的精度。最后仿真結(jié)果表明,在系統(tǒng)不同的增益條件下,隔離彈體擾動的程度也有很大的差別,這為實際工程中設(shè)計相控陣?yán)走_導(dǎo)引頭前向通道增益Ks和波束控制增益Kg提供了重要的理論依據(jù)和參考價值。
參考文獻:
[1] 賈鑫,羅艷偉,羅麗.全捷聯(lián)導(dǎo)引頭解耦技術(shù)方法[J]. 戰(zhàn)術(shù)導(dǎo)彈技術(shù), 2013, 34(1): 77-81.
JIA X, LUO Y W, LUO L. Research on decoupling methods of strapdown seeker[J].Tactical Missile Technology,2013,34(1): 77-81.
[2] ROCK J C, MULLINS J H, BOOTH J P. The past, present, and future of electronically-steerable phased arrays in defense applications[C]∥Proc.of the IEEE Aerospace Conference, 2008: 1-7.
[3] 魯天宇,尹健,夏群利,等.基于波束角誤差補償?shù)南嗫仃噷?dǎo)引頭解耦算法[J].系統(tǒng)工程與電子技術(shù),2015,37(9):2123-2128.
LU T Y, YIN J, XIA Q L, et al. A kind of decoupling algorithm of phased array seeker based on beam angle error compensation[J]. Systems Engineering and Electronics, 2015, 37(9): 2123-2128.
[4] 樊會濤,楊軍,朱學(xué)平.相控陣?yán)走_導(dǎo)引頭波束穩(wěn)定技術(shù)研究[J].航空學(xué)報,2013,34(2): 387-392.
FAN H T, YANG J, ZHU X P. Research on beam stable technology of phased array radar seeker[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(2): 387-392.
[5] 李秋生.相控陣?yán)走_導(dǎo)引頭捷聯(lián)去耦技術(shù)研究[J]. 制導(dǎo)與引信, 2005, 26(2): 19-22.
LI Q S. Strapdown decoupling technique research on phased array radar seeker[J]. Guidance and Fuze, 2005, 26(2): 19-22.
[6] ELGAME S A, SORAGHAN J. Target tracking enhancement using a Kalman filter in the presence of interference[C]∥Proc.of the Geoscience and Remote Sensing Symposium,2009:681-684.
[7] ROTSTEIN H, REINER J, BEN-ISHAI A. Kalman filter mechanization in INS/Seeker fusion and observability analysis[C]∥Proc.of the AIAA Guidance, Navigation, and Control Conference and Exhibit, 2001: 2001-4402.
[8] VERGEZ P L, MCCLENDON J R. Optimal control and estimation for strapdown seeker guidance of tactical missiles[J]. Journal of Guidance, Control,and Dynamics,1982,5(3):225-226.
[9] YUN J, RYOO C K, SONG T L. Strapdown sensors and seeker based guidance filter design[C]∥Proc.of the International Conference on Control, Automation and Systems, 2008: 468-472.
[10] CHEN J, LI J H, YANG S H, et al. Weighted optimization-based distributed Kalman filter for nonlinear target tracking in collaborative sensor networks[J]. IEEE Trans.on Cybernetics, 2017, 47(11): 3892-3905.
[11] 宗睿. 導(dǎo)引頭天線罩誤差及相控陣導(dǎo)引頭波束指向誤差在線補償方法研究[D]. 北京: 北京理工大學(xué), 2016.
ZONG R. Research on online compensation methods for radome error of seeker and beam direction error of phased array seeker[D]. Beijing: Beijing Institute of Technology, 2016.
[12] 張旭輝,林海軍,劉明珠,等.基于蟻群粒子群優(yōu)化的卡爾曼濾波算法模型參數(shù)辨識[J].電力系統(tǒng)自動化,2014,38(4):44-49.
ZHANG X H, LIN H J, LIU M Z, et al. Model parameters identification of UKF algorithm based on ACO-PSO[J]. Automation of Electric Power Systems, 2014, 38(4): 44-49.
[13] YANG G, ZHOU F R, MA Y, et al. Identifying lightning channel-base current function parameters by powell particle swarm optimization method[J]. IEEE Trans.on Electromagnetic Compatibility. 2017, 60(1): 182-187.
[14] LI J, ZHANG J Q, JIANG C J. Composite particle swarm optimizer with historical memory for function optimization[J]. IEEE Trans.on Cybernetics, 2015, 45(10): 2350-2363.
[15] 秦永元,張洪鉞,汪叔華.卡爾曼濾波與組合導(dǎo)航原理[M].3版.西安:西北工業(yè)大學(xué)出版社, 2015.
QIN Y Y, ZHANG H Y, WANG S H. Kalman filtering and integrated navigation principle[M]. 3rd ed. Xi’an: Northwestern Polytechnical University Press, 2015.
[16] WANG L, YANG B, ORCHARD J. Particle swarm optimization using dynamic tournament topology[J]. Applied Soft Computing, 2016, 48(16): 584-596.
[17] SARKER R A, ELSAYED S M, RAY T. Differential evolution with dynamic parameters selection for optimization problems[J]. IEEE Trans.on Evolution Computation, 2014, 18(5): 689-707.
[18] ZHANG L, TANG Y, HUA C, et al. A new particle swarm optimization algorithm with adaptive inertia weight based on Bayesian techniques[J].Applied Soft Computing,2015,28(C): 138-149.
[19] JI W, WANG J, ZHANG J. Improved PSO based on update strategy of double extreme value[J]. International Journal of Control & Automation, 2014, 7(2): 231-240.
[20] TRELEA I. The particle swarm optimization algorithm: convergence analysis and parameter selection[J]. Information Processing Letters, 2003, 85(6): 317-325.
[21] EBERHART R C, SHI Y. Comparing inertia weights and constriction factors in particle swarm optimization[C]∥Proc.of the Congress on Evolutionary Computation, 2000: 84-88.
[22] SHI Y, EBERHART R C. A modified particle swarm optimizer[C]∥Proc.of the IEEE International Conference on Evolutionary Computation, 1998: 69-73.
[23] 朱振虹,夏群利, 蔡春濤, 等. 相控陣導(dǎo)引頭去耦及視線角速率提取算法研究[J]. 戰(zhàn)術(shù)導(dǎo)彈技術(shù), 2013, 6(5): 70-75.
ZHU Z H, XIA Q L, CAI C T, et al. Research on phased array seeker decoupling and line of sight rate extraction algorithmic[J]. Tactical Missile Technology, 2013, 6(5): 70-75.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
測控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36