視線角約束自適應滑模中制導律
2018-04-04 00:28:50呂壽坤孟克子王子才
系統工程與電子技術 2018年4期
關鍵詞:模態
呂壽坤, 周 荻, 孟克子, 王子才
(1. 北京電子工程總體研究所, 北京 100854; 2. 哈爾濱工業大學航天學院, 黑龍江 哈爾濱 150001)
0 引 言
中遠程攔截中,常采用“中制導+末制導”的制導體制,因攔截導彈高速飛行,氣動產生的熱量易對導引頭的探測產生干擾。側窗探測導引頭應運而生。側窗探測要求中末制導交班時刻的視線方向滿足特定約束條件。應用視線角約束還可帶來中末制導段彈道過渡平滑的好處,同時可使導彈在末制導段以最佳角度毀傷目標,戰斗部殺傷效能得到最大發揮。此外,在中末制導交班時刻,如視線角速率趨于零,導彈在末制導段將以準平行彈道飛向目標[1]。因此應在中制導律設計中考慮此類約束。當前,視線角約束滑模末制導律是研究熱點,攻擊角/落角約束研究也可稱為視線角約束,對攻擊角約束的目的一般是要使導彈戰斗部效能最大化。文獻[2-4]研究了基于滑模控制的攻擊角度約束制導律,文獻[4]還討論了制導算法有限時間收斂特性。文獻[5]綜合最優控制、滑模控制和徑向基函數 (radial basis function,RBF)網絡設計了變結構增益項可調節的落角約束最優滑模導引律。文獻[6]提出了針對空地制導武器的最優滑模攻擊角度約束導引律。文獻[7-10]則考慮導彈自動駕駛動態特性,設計了攻擊角度約束導引律,其中文獻[7]采用的是滑模與backstepping綜合控制方法;文獻[8]采用的是滑模與動態面綜合控制方法;文獻[9]考慮了視線角速率及視線角的有限時間收斂特性,采用的是積分滑模控制方法;文獻[10]針對靜止目標、恒速目標及機動目標設計導引律,以實現全方位攔截。文獻[11]針對不考慮攻擊角約束和考慮攻擊角約束兩種情況,設計二階滑模導引律。文獻[3-6,9]中的攻擊角/落角約束等同于視線角約束,文獻[2,7-8,10-18]中攻擊角度約束也是通過對視線角的間接控制實現的。
末制導階段,如視線角被控制至期望值,則視線角速率將不斷變化。因此,導彈與目標無法形成準平行接近,進而實現最佳的碰撞幾何,末端脫靶量勢必會增大。實際使用中,應在中制導段完成視線角約束,在末制導過程中要使視線角基本保持不變。基于上述考慮,同時還要達到中末制導交班時刻彈道平滑過渡和側窗探測的要求,基于目標與導彈相對運動方程,設計了基于滑模控制的視線角約束自適應魯棒中制導律。該中制導律所需信息輸入少,便于工程實現。
1 目標-導彈相對運動方程
目標和導彈相對運動方程為
(1)

設中末制導交班時刻視線角的期望值為qd,選取狀態變量
則視線角約束下的制導系統狀態方程為
(2)

?t>0
(3)
為了便于滑模中制導律的分析,引入如下引理:
引理1[19]假設存在連續正定函數V(t)滿足
?t>t0
(4)
那么V(t)可在有限時間ts內收斂至原點,且ts滿足
(5)
式中,β>0;λ>0;0<γ<1。
2 自適應滑模中制導律
滑模控制已廣泛應用于制導與控制系統設計中,其對參數攝動及干擾具有很好的魯棒性及自適應不變性。以下采用滑模控制來設計視線角約束的中制導律。
針對制導系統式(2),選取滑動模態面為
(6)
自適應滑模趨近律選取為
k2=const.>0,ε=const.>0
(7)
式(7)的物理意義是:制導系統趨近滑模的速率隨r的變化進行調節。當r較大時,趨近速率較慢;當r→rc時,趨近速率快速增大。這種趨近速率調節有益于抖振的抑制。
(8)
根據式(7)和式(8)并結合式(6),可得視線角約束的滑模中制導律為
(9)
實際中,如果目標機動,則其機動加速度aT難以獲得,可以將其視為系統的擾動。但考慮到目標可用過載等因素的限制,aT一定是有界的,假設aT滿足
|aT|≤f=const.
(10)
則工程中易于實現的滑模中制導律為
(11)
證明將中制導律式(11)代入式(8)中,可得
(12)
定義Lyapunov函數為
V=S2
(13)
式(13)相對時間求導并將式(12)代入其中,同時考慮到ε=f+α和|aT|≤f,可得
(14)
考慮式(3),進一步可得
(15)
根據式(15)和定理1可知,制導系統可在有限時間ts內收斂至滑動模態面S=0,且ts滿足
(16)

當制導系統進入滑動模態面后有
(17)
根據式(17),可得
?



(18)
其中
(19)
考慮到r(tc)=rc,可得
(20)
根據式(20),可得
(21)
由式(18)和式(21),可得
(22)
結合式(22)和式(17)很容易得到
(23)
證畢
通過用函數S/(|S|+δ)代替函數sgnS,可消除式(11)中開關函數項sgnS在制導系統中產生的抖動,即
(24)
針對三維空間中的攔截問題,將導彈和目標的運動分解到縱向平面和側向平面內,根據中制導律式(24)的推導與分析,視線俯仰通道和偏航通道中視線角約束中制導律的表達式為
(25)
其中
(26)
由式(25)可知,在中末制導交班時刻亦即r等于rc時,制導指令會出現奇異現象,為了保證中末制導平滑過渡,這顯然是不允許的。為了避免奇異的產生,當r接近rc時,將式(25)中aMε和aMβ的后3項分母中的rc替換為rc-Δrc,其中Δrc>0為隨著r趨于rc而逐漸增大的量。但是,式(26)滑動模態面S1和S2中的rc值保持不變。由于S1和S2本身是開關函數的變量,式(26)將開關函數替換為連續函數Si/(|Si|+δi),i=1,2以削弱抖動,其在交班時刻不會產生奇異。這樣處理既可避免交班時刻制導指令奇異,也能滿足交班精度要求。
3 仿真驗證

圖1 視線角
圖2 視線角速率
圖3 導彈加速度指令
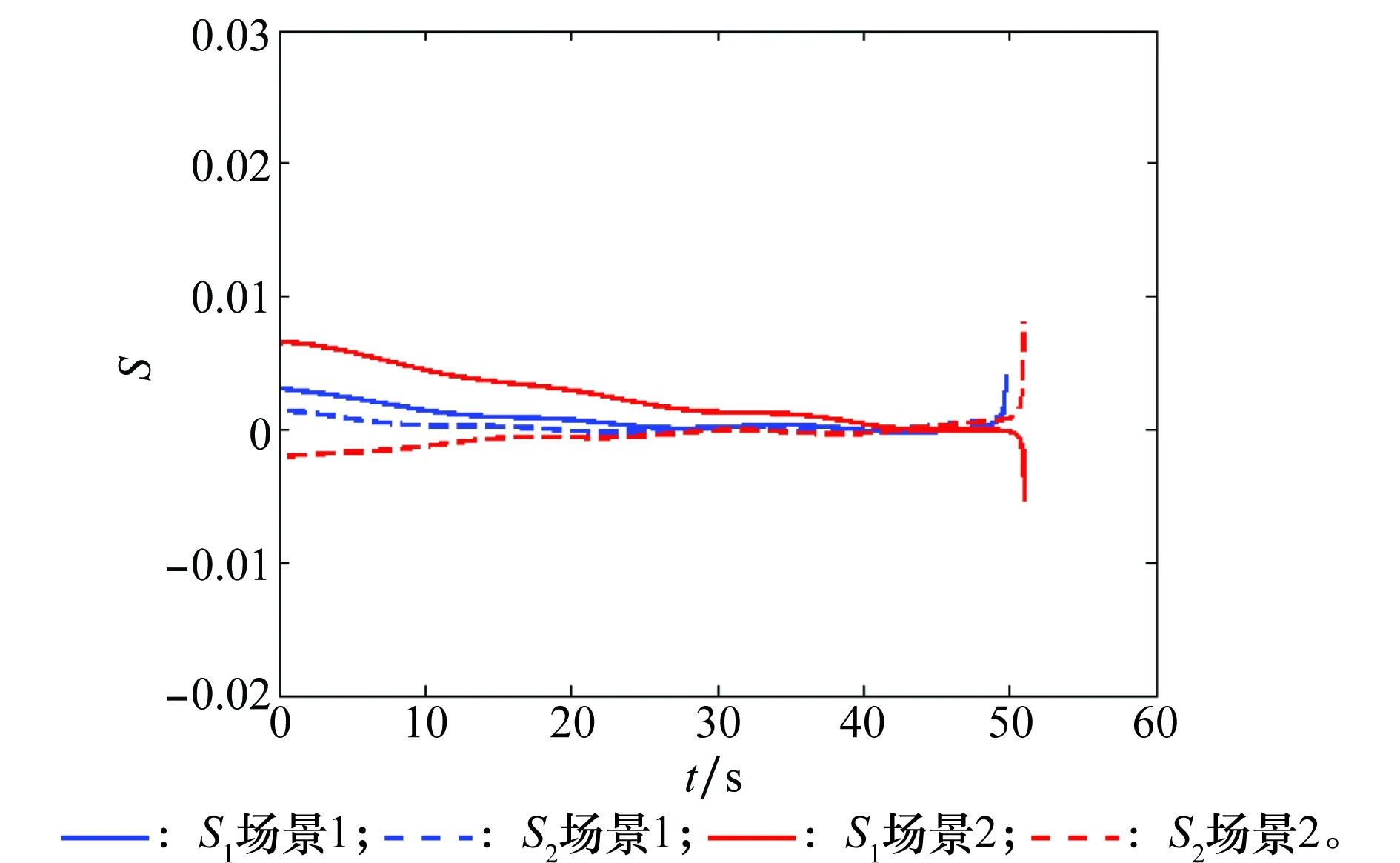
圖4 滑動模態面
由圖1~圖4可知,在所設計制導律的作用下,滑動模態面可在有限時間內收斂至零附近的微小鄰域內,如圖4所示;視線角漸進收斂至期望值,如圖1所示;視線角速率向零附近收斂,如圖2所示。由于導彈可用過載的限制,導彈加速度指令出現了局部飽和的現象,如圖3所示,盡管如此,制導精度依然滿足要求。
中末制導交班誤差如表1所示。
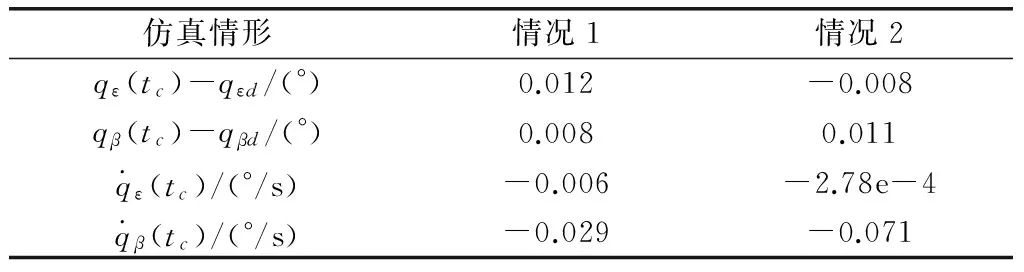
表1 中末制導交班誤差
據表1可知,中末制導交班時刻視線角的收斂誤差小,視線角速率接近于零。同時,由于對中制導律進行了奇異處理,中末制導交班時刻導彈加速度指令并未出現發散現象。
4 結 論
設計了視線角約束滑模中制導律。該中制導律能使制導系統在有限時間內收斂至滑動模態面,且在中末制導交班時刻能夠實現視線角速率趨零,同時保證視線角趨于給定的期望值。另外,該中制導律對目標機動具有較強的魯棒性,且交班誤差小。最后,該中制導律中需要的變量僅有導彈與目標相對距離、導彈與目標接近速度及視線角和視線角速率,因此設計的中制導律易于工程實現。
參考文獻:
[1] 周荻.尋的導彈新型導引規律[M].北京:國防工業出版社,2002.
ZHOU D. New guidance laws for homing missile[M]. Beijing: National Defence Industry Press, 2002.
[2] 吳鵬, 楊明. 帶終端攻擊角度約束的變結構制導律[J]. 固體火箭技術, 2008, 31(2): 116-119.
WU P, YANG M. Variable structure guidance law with terminal attack angle constraint[J]. Journal of Solid Rocket Technology, 2008, 31(2): 116-119.
[3] 尹永鑫, 楊明, 吳鵬. 針對機動目標帶攻擊角度約束的三維制導律[J]. 固體火箭技術, 2010, 33(3): 237-241.
YIN Y X, YANG M, WU P. Three-dimensional guidance law with attack angle constraint for maneuverable target[J]. Journal of Solid Rocket Technology, 2010, 33(3): 237-241.
[4] ZHANG Y X, SUN M W, CHEN Z Q. Finite-time convergent guidance law with impact angle constraint based on sliding-mode control[J]. Nonlinear Dynamics, 2012, 70(1): 619-625.
[5] 盧春燕, 周德云, 張堃,等. 基于RBF的帶落角約束的最優滑模導引律設計[J]. 電光與控制, 2012, 19(5): 20-23.
LU C Y, ZHOU D Y, ZHANG K, et al. Design of an optimal sliding mode guidance law with terminal angle constraint based on RBFNN[J].Electronics Optics and Control,2012,19(5): 20-23.
[6] ZHANG Q Z, WANG Z B, TAO F. On-line optimization design of sliding mode guidance law with multiple constraints[J]. Applied Mathematical Modeling, 2013, 37(14/15): 7568-7587.
[7] 孫勝, 張華明, 周荻. 考慮自動駕駛儀動特性的終端角度約束滑模導引律[J]. 宇航學報, 2013, 34(1):69-78.
SUN S, ZHANG H M, ZHOU D. Sliding mode guidance law with autopilot lag for terminal angle constrained trajectories[J]. Journal of Astronautics, 2013, 34(1):69-78.
[8] ZHOU D, QU P P, SUN S. A guidance law with terminal impact angle constraint accounting for missile autopilot[J]. Journal of Dynamic Systems, Measurement and Control,2013,135(5): 051009.
[9] ZHANG Z X, LI S H, LUO S. Composite guidance laws based on sliding mode control with impact angle constraint and autopilot lag[J]. Transactions of the Institute of Measurement and Control, 2013, 35(6): 764-776.
[10] KUMAR S R, RAO S, GHOSE D. Sliding-mode guidance and control for all-aspect interceptors with terminal angle constraints[J].Journal of Guidance Control and Dynamics,2012,35(4):1230-1246.
[11] SHIMA T. Intercept-angle guidance[J].Journal of Guidance Control and Dynamics, 2012,34(2):484-492.
[12] YAMASAKI T, BALAKRISHNAN S N, TAKANO H, et al. Second order sliding mode-based intercept guidance with uncertainty and disturbance compensation[C]∥Proc.of the AIAA Guidance, Navigation and Control Conference, 2013.
[13] BYUNG S, JANG G, HYUNG S. Homing guidance with terminal angular constraint against non-maneuvering and maneuvering target[C]∥Proc.of the AIAA Guidance, Navigation and Control Conference, 1997:189-199.
[14] XIONG S F, WANG W H, LIU X D, et al. Guidance law against maneuvering targets with intercept angle constraint[J]. ISA Trans., 2014, 53(4): 1332-1342.
[15] KUMAR S R, RAO S, GHOSE D. Nonsingular terminal sliding mode guidance with impact angle constraints[J]. Journal of Guidance, Control and Dynamics, 2014, 37(4): 1114-1130.
[16] LI Q C, ZHANG W S, HAN G, et al. Fuzzy sliding mode control guidance law with terminal impact angle and acceleration constraints[J].Journal of Systems Engineering and Electronics, 2016, 27(3):664-679.
[17] YUN Y, TANG S, GUO J, et al. Adaptive sliding-mode guidance with terminal angle constraints based on explicit space engagement model[C]∥Proc.of the IEEE Chinese Guidance, Navigation and Control Conference, 2017.
[18] RAO S, GHOSE D. Terminal impact angle constrained gui-dance laws using variable structure systems theory[J]. IEEE Trans.on Control Systems Technology,2013,21(6):2350-2359.
[19] CHEN M, WU Q X, CUI R X. Terminal sliding mode tracking control for a class of SISO uncertain nonlinear systems[J]. ISA Transaction, 2013, 52(2): 198-206.
猜你喜歡
成都信息工程大學學報(2022年4期)2022-11-18 07:31:14
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:12
工程與建設(2019年1期)2019-09-03 01:12:12
廣州大學學報(自然科學版)(2016年2期)2017-01-15 13:43:00
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
振動工程學報(2014年4期)2014-03-01 01:15:31
電影新作(2014年1期)2014-02-27 09:07:36