基于Wifi無線視頻監控的移動機器人的研發
2018-04-04 05:01:37田亞娟廣東松山職業技術學院科研處廣東韶關512126
電氣自動化
2018年1期
田亞娟(廣東松山職業技術學院科研處,廣東 韶關 512126)
0 引 言
設計研發了一種基于Wifi無線視頻監控的移動機器人,機器人可以直接用筆記本電腦上的無線網卡連接的Wifi網絡對機器人進行監控。其具有實時性高、成本較低、易于擴展、結構緊湊輕巧、移動靈活敏捷、通過能力強、適應性能力強、有合適的通信距離和支持遠程監控的特點。具有可以通過城市內一般障礙、在城市路面以及部分野外路面以較高的速度行走、轉向靈活、能在較為惡劣的環境中進行工作、適于城市環境內無線通信并能將采集到的數據回傳其監控系統的功能。
1 系統的硬件組成
1.1 系統的硬件組成
機器人系統[1]的結構框圖如圖1所示。機器人系統由五大部分組成,分別為機械控制部分,環境信息采集部分,通信部分,功能輔助部分及上位機部分。
機械控制主要負責舵機的協調組合動作,以實現攝像頭的向上、向下、左轉、右轉四項基本動作、控制土壤濕度計的插入、拔出,以及控制移動機器人的前進、后退、左轉、右轉使其能在陌生的環境中靈活動作。
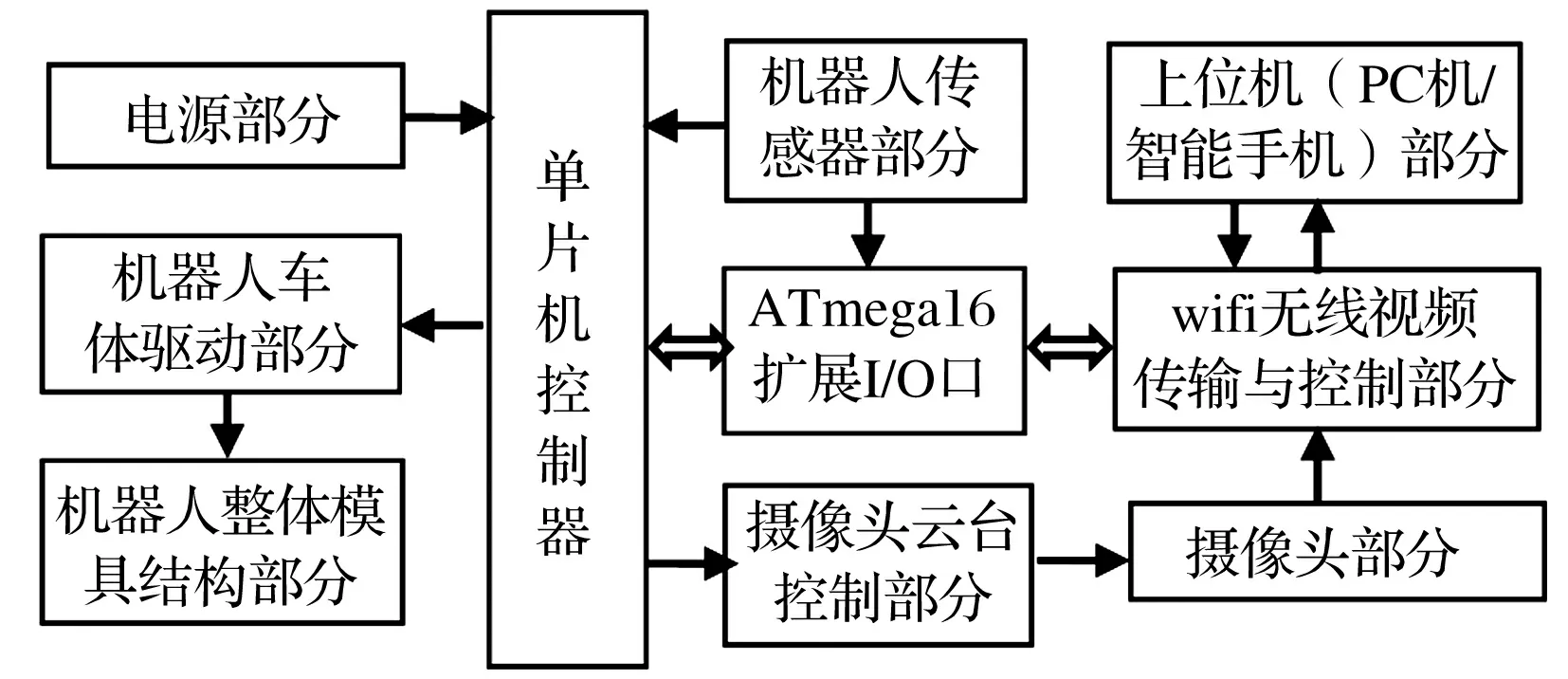
圖1 系統的結構框圖
環境信息采集通過傳感器部分能夠檢測包括溫濕度信息、土壤的濕度信息、紫外線信息、煙霧信息、氣壓信息、經緯度信息、海拔信息、振動信息、金屬探測信息、人體熱釋電紅外信息等在內的眾多環境信息參數,并可根據具體任務要求進行擴展。
通信部分通過Wifi無線數據傳輸模塊[2]將采集的信息參數實時準確的進行傳輸。……
登錄APP查看全文
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國生殖健康(2019年11期)2019-01-07 01:28:02
制造技術與機床(2017年3期)2017-06-23 08:11:21
電子設計工程(2015年15期)2015-02-27 12:07:30