針對上肢高位截肢者的肌電假肢設(shè)計*
2018-04-09 07:26:40張定國
傳感器與微系統(tǒng) 2018年4期
關(guān)鍵詞:動作
汪 洋, 張定國
(上海交通大學 機械系統(tǒng)與振動國家重點實驗室,上海 200240)
0 引 言
肌電作為一種人體生物信號,包含了大量的神經(jīng)信號[1],結(jié)合模式識別算法可以解析出相應(yīng)的運動意圖[2]。國內(nèi)外一些機構(gòu)針對用肌電信號控制的假肢進行了很多研究[3~6]。但目前研究工作大多聚焦于手部假肢,即面向前臂截肢者,鮮有針對高位截肢患者的肌電假肢設(shè)計和研發(fā)。主要原因有:1)采集的表面肌電信號存在很多噪聲,且不同的肌肉產(chǎn)生肌電信號傳導(dǎo)至皮膚存在串擾[7]。2)人體的肌電信號在每天的不同時刻均可能存在差異,且每次佩戴肌電采集裝置的位置亦存在差異[8],導(dǎo)致難保證上一次訓(xùn)練的模式識別模型可以在下一次使用[9,10]。3)一般訓(xùn)練的模型比較大,難以在線快速訓(xùn)練,而快速訓(xùn)練對于截肢患者是很重要的一個指標[11]。4)對于一般高位截肢者控制手部和腕部運動的肌電信號已經(jīng)丟失,其結(jié)果是控制手部和腕部的意圖不能從肌電信號中體現(xiàn)出來。因此,目前的假肢大多以肌電信號作為開關(guān)量控制假肢的運動,通過多個肌電采集通道上的有無狀態(tài)的組合控制假肢各個關(guān)節(jié)的運動[12]。這種控制方式很難做到截肢者想做什么動作,假肢就做出什么樣的動作,導(dǎo)致使用者認為假肢實用性不強[13,14]。
上述問題中前3個問題可以通過改進肌電傳感器、肌電處理算法和假肢接收腔的佩戴方式解決[12,15]。針對問題(4),美國Kuiken團隊提出的靶向肌肉神經(jīng)移植(targeted muscle reinnervation,TMR)手術(shù)提供了解決方案[16],將殘留的神經(jīng)移植到殘余的靶向肌肉(比如胸大肌)上,從而恢復(fù)控制手部和腕部運動的肌電信號。目前基于TMR的肌電假肢研究只在美國的某些團隊開展,國內(nèi)尚未有相關(guān)研究成果發(fā)表。
本文與上海華山醫(yī)院手外科合作,在國內(nèi)率先開展了基于靶向肌肉神經(jīng)移植手術(shù)的肌電假肢研究。主要介紹了一種針對高位截肢患者的假肢系統(tǒng)設(shè)計,為后期的臨床測試奠定了基礎(chǔ)。
1 假肢結(jié)構(gòu)
假肢的運動關(guān)節(jié)包括肘關(guān)節(jié)、腕關(guān)節(jié)和手。機械臂的三維模型和實物如圖1所示。機械手使用了由上海交通大學機器人研究所生機電實驗室研發(fā)的SJTU-6,包含6個自由度。本文6個自由度耦合使用,由控制器控制6個電機同時運動,當檢測到某個手指與物體達到一定接觸力時,手指停止運動,而其他未滿足條件的手指則繼續(xù)運動。由此機械手即可更容易地抓取不同形狀的物體。肘關(guān)節(jié)采用無刷電機和諧波減速器的設(shè)計方案,腕關(guān)節(jié)采用無刷電機加行星減速器的方式。另外,考慮到腕關(guān)節(jié)的旋轉(zhuǎn)運動對布線的影響,在腕關(guān)節(jié)增加了導(dǎo)電滑環(huán)。導(dǎo)電滑環(huán)可以在避免導(dǎo)線纏繞的情況下為機械手上的電機供電。各個關(guān)節(jié)的運動范圍如表1所示。
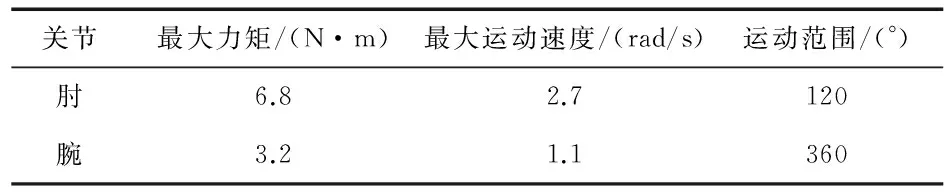
表1 手臂性能參數(shù)
2 假肢電氣系統(tǒng)
2.1 硬件結(jié)構(gòu)
硬件結(jié)構(gòu)如圖2所示,硬件系統(tǒng)包括肌電采集模塊、總控制模塊和驅(qū)動模塊。肌電采集模塊將表面肌電信號放大濾波,驅(qū)動模塊驅(qū)動相應(yīng)的電機運動,肘部關(guān)節(jié)和腕部關(guān)節(jié)的無刷電機的驅(qū)動模塊直接由總控制器控制,手部電機的驅(qū)動模塊由手部控制器控制,總控制器通過串口發(fā)送命令控制手部控制器。
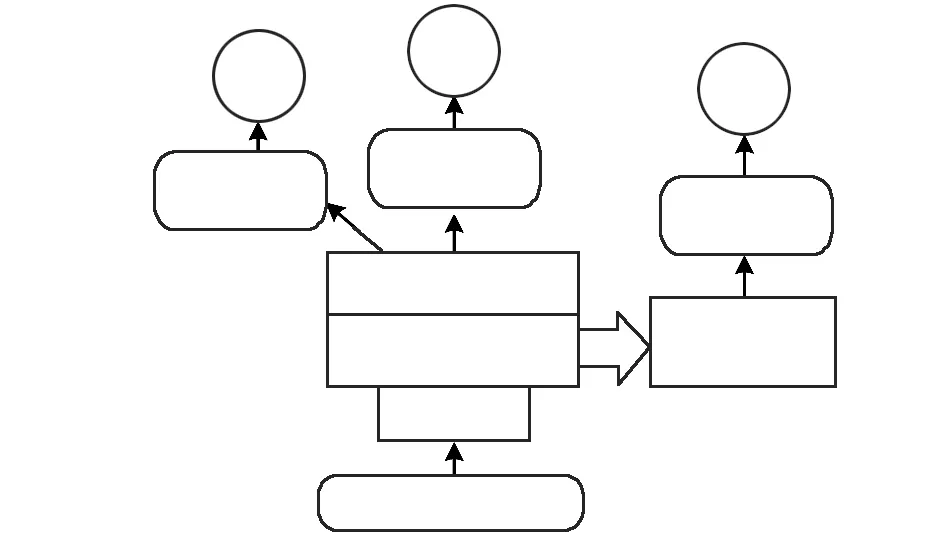
圖2 硬件結(jié)構(gòu)框圖
2.2 采樣系統(tǒng)
肌電信號在由模/數(shù)轉(zhuǎn)換器(analog to digital converter,ADC)采樣前首先通過儀表放大器和運放組成的濾波電路[17]被放大和濾波,如圖3所示。
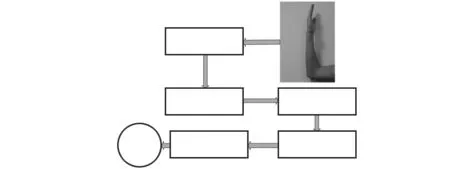
圖3 采樣系統(tǒng)
肌電信號通過低通濾波器,經(jīng)過儀表放大器放大100倍后,通過截止頻率為15.9~482 Hz的帶通濾波器。經(jīng)過陷波頻率為50 Hz的陷波器,并將信號再次放大50倍。再對放大和濾波后的信號抬升1.5V,最終由STM32F103ZET6的ADC采樣得到。ADC的采樣頻率為1 860 Hz。在該假肢系統(tǒng)中共有5個肌電采集通道。ADC采用輪詢方式,采樣結(jié)束后由直接存儲器存取(direct memory access,DMA)存于緩存中。當每個通道采集滿128個數(shù)據(jù)點后執(zhí)行一次特征提取。
3 控制算法
3.1 算法基礎(chǔ)
假肢有3個獨立的自由度,為了做到使截肢患者靈巧地控制假肢,必須得到7個不同類的動作,即控制3個自由度往返的6類動作和一個休息態(tài)的動作。但考慮到保證識別率,系統(tǒng)中將手腕的內(nèi)旋和外旋合并為一個外旋動作,即共有6類動作,如表2所示。
6類動作可以根據(jù)情況進行定義,最理想的狀態(tài)是定義成和假肢的動作相同的動作類型。在一般情況下高位截肢患者人群,相應(yīng)的肌肉已經(jīng)不存在或者萎縮。需要找到替代的信號源或者進行神經(jīng)移植手術(shù)[16],但亦無法保證每種運動的運動神經(jīng)能夠分開,所以本文動作1,2,3,4,5未限定。為了識別包括空閑態(tài)的6類動作,系統(tǒng)中采用了模式識別的方式。
系統(tǒng)選用基于貝葉斯決策的線性分類器(linear discriminant analysis,LDA)[18~20],可以達到快速訓(xùn)練的要求。特征選用時域上的特征,便于實時系統(tǒng)的計算,提高識別速度,且能達到良好的效果[21,22]。肌電采用的特征有絕對平均值(mean absolute value,MAV)、波長(wave length,WL)、過零點數(shù)(zero-point crossing,ZC)、斜率符號變化(slope symbol change,SSC)次數(shù)4個特征,分別由式(1)~式(4)得到[3]
(1)
(2)
(3)
(4)
分類器計算公式為
(5)
式中X為特征向量;μC為相應(yīng)動作類別所有訓(xùn)練特征向量的平均向量。p(wc)為動作c出現(xiàn)的概率,在實際情況中一般每個動作出現(xiàn)的概率是相當?shù)模栽谙到y(tǒng)中不考慮每個動作概率不同的影響,即在此處lnp(wc)=0。式中的Σ為總協(xié)方差矩陣,其計算公式為[15]。
(6)
式中Σc為各個動作的協(xié)方差矩陣;C為動作類別數(shù);nc為每個動作的訓(xùn)練樣本數(shù);N為總的訓(xùn)練樣本數(shù)。當?shù)玫揭粋€X時,通過式(5)計算得到6個值。比較6個值的大小,最終的識別結(jié)果即為最大值對應(yīng)的動作。
3.2 算法的片上實現(xiàn)過程
3.2.1 訓(xùn)練流程
在控制板上有6個指示燈分別對應(yīng)6類動作。當相應(yīng)按鈕按下時對應(yīng)的指示燈亮起,使用者做出相應(yīng)的動作,同時ADC開始采樣。每個動作的采樣時間約為7 s,為了得到穩(wěn)態(tài)的信號將前4 s的信號舍棄。
為了保證實時性和識別率,系統(tǒng)中的數(shù)據(jù)處理窗長度為256個數(shù)據(jù)點,滑動窗長度為128個數(shù)據(jù)點[19]。在1 860 Hz的采樣頻率下,處理的延遲時間為68.8 ms,明顯小于可以接受的延遲時間256 ms[19]。當各通道得到128個數(shù)據(jù)點時,將這些數(shù)據(jù)與之前的128個數(shù)據(jù)合并,并提取特征。處理過程如圖4所示。
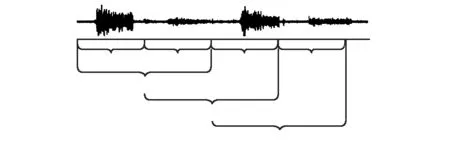
圖4 肌電特征的實時提取
整個系統(tǒng)的訓(xùn)練過程如圖5所示。當指示燈1亮時,使用者開始做動作1。主控板上的ADC不停地將采樣結(jié)果經(jīng)DMA存儲在緩存區(qū),當所有通道的存儲數(shù)量達到128時觸發(fā)中斷。為了消除尾跡的影響,在開始的緩沖區(qū)存滿前200次未進行訓(xùn)練,即前4 s的數(shù)據(jù)。在緩沖區(qū)滿201次時,中斷程序?qū)⒋舜蔚玫降?28個數(shù)據(jù)和上一次得到的128個數(shù)據(jù)合并,提取特征。每個動作提取40次特征。系統(tǒng)中有5個通道,每個通道提取4個時域特征,最終可以得到40個20維的特征向量。由該40個特征向量得到動作1的協(xié)方差矩陣,并得到40個特征向量的平均特征向量μC。
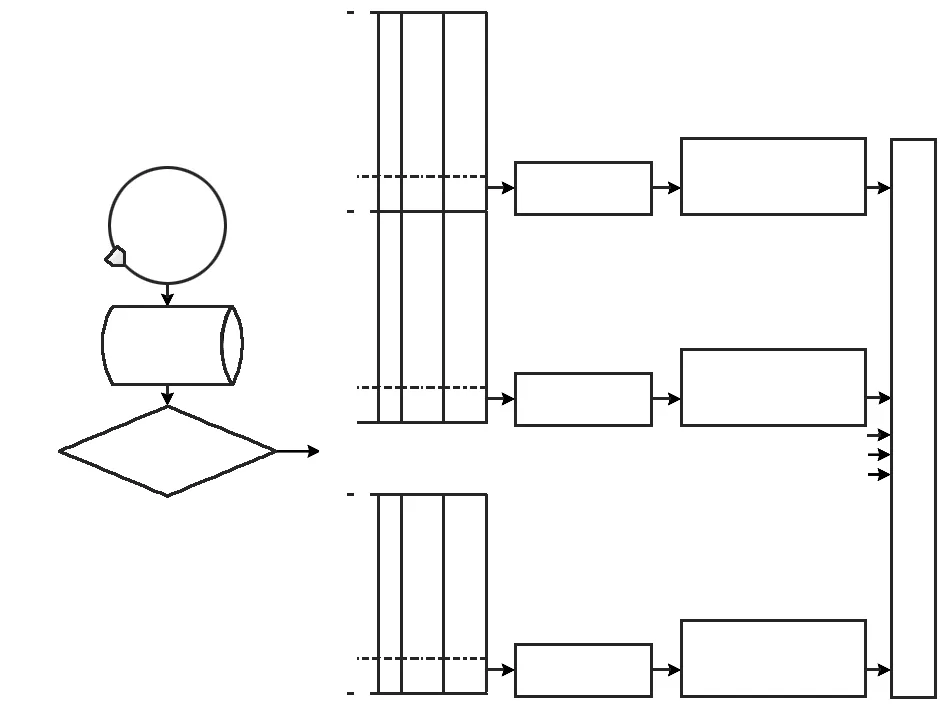
圖5 在線訓(xùn)練算法流程
在得到各個動作的協(xié)方差矩陣后通過式(6)將各動作的協(xié)方差矩陣合并得到最終的總協(xié)方差矩陣Σ。
3.2.2 識別流程
如圖6,得到各動作的平均特征向量μC和總的協(xié)方差矩陣Σ后即可根據(jù)式(5)進行動作識別。當緩沖區(qū)的數(shù)據(jù)存滿128個時送入分類器,分類器結(jié)合上128個數(shù)據(jù)進行預(yù)測。
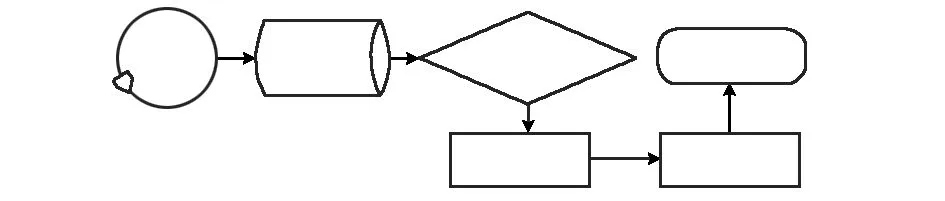
圖6 在線動作識別流程
根據(jù)預(yù)測結(jié)果即可由主控板對驅(qū)動電路發(fā)出控制指令,控制相應(yīng)的關(guān)節(jié)運動。
4 實 驗
4.1 受試者信息
實驗招募了5位受試者,4名男性,1名女性,年齡在20~26歲。5名受試者手臂健全。
4.2 實驗流程
為驗證系統(tǒng)的識別率,進行了5名受試者的在線分類實驗。分類實驗包括了1次分類器訓(xùn)練和10次預(yù)測。
整個實驗的過程如下:1)將5個肌電電極片貼于手臂。貼放的位置分別為掌長肌、尺側(cè)腕屈肌、指伸肌、肱二頭肌和肱三頭肌,如圖7所示。注意:參考這些前臂肌電電極針對的肌肉,后期將會在高位截肢患者上進行靶向肌肉神經(jīng)移位手術(shù)來獲取對應(yīng)的肌電信號。2)訓(xùn)練線性分類器,受試者根據(jù)指示燈的提示分別作出放松、握拳、外翻手腕、內(nèi)翻手腕、屈肘和伸肘6類動作。在放松狀態(tài)下手臂處于自然垂直狀態(tài);握拳、手腕外翻和手腕內(nèi)翻3個動作手臂處于垂直狀態(tài);在屈肘時,手腕和手指放松,上臂處于垂直狀態(tài);在伸肘時手腕和手指處于放松狀態(tài),手臂處于垂直狀態(tài)。3)6類動作按放松、握拳、外翻手腕、內(nèi)翻手腕、屈肘和伸肘的順序進行。每個動作大約7s。6類動作完成后,得到分類器模型。
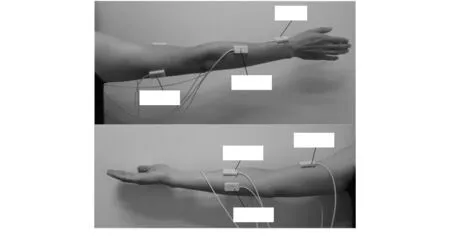
圖7 電極貼放位置
在預(yù)測實驗中,受試者根據(jù)指示燈的提示完成相應(yīng)動作,分類器將分類的結(jié)果存儲在STM32的RAM上。動作的順序與訓(xùn)練時相同,每個動作的持續(xù)時間為4 s左右。受試者根據(jù)指示燈的提示進行動作切換。受試者完成一次預(yù)測實驗后,系統(tǒng)暫停分類,通過串口將分類的結(jié)果傳輸至上位機,保存結(jié)果。重復(fù)預(yù)測實驗10次。
4.3 實驗結(jié)果
上述實驗可以得到5名受試者的識別率數(shù)據(jù)。任意抽取1名受試者的1次預(yù)測實驗的實驗數(shù)據(jù),如圖8所示。如圖中橫坐標所示前60次受試者放松,61~120次受試者握拳,后面以此類推。縱坐標為識別結(jié)果,其中,1為放松態(tài),2為握拳,3為外翻手腕,4為內(nèi)翻手腕,5為屈肘,6為伸肘。
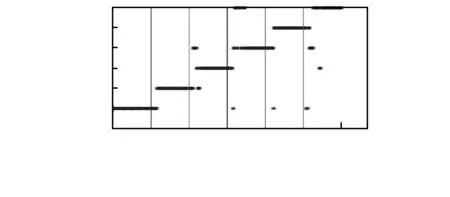
圖8 6類動作在線預(yù)測結(jié)果
從圖9可以看出,雖然在60~120次指示燈指示做握拳的動作,但識別結(jié)果依然為放松態(tài),該現(xiàn)象稱為識別延遲。在后面幾個動作的切換點處也存在同樣的識別延遲。主要原因是受試者在看到指示燈跳轉(zhuǎn),到調(diào)節(jié)到相應(yīng)的動作存在一段時間。另外從圖中可以看出:2個動作的間隔時間點附近識別的結(jié)果會發(fā)生跳動。例如在屈肘和伸肘間隔點附近識別結(jié)果跳到了4(內(nèi)翻手腕)。主要是因為在兩個動作切換時,肌電信號不穩(wěn)定。
以上的結(jié)果同樣可以從5名受試者總的混淆矩陣看出,如表3所示。混淆矩陣的對角線為動作識別的正確率,可以看出:動作1(握拳)識別率為95.1 %,為5個動作中最高的,而每類動作的錯誤分類情況主要集中在該動作的前一個動作。例如動作2被識別為動作1有16.7 %,動作3被識別為動作2的有15.1 %,后面幾個動作存在類似情況。
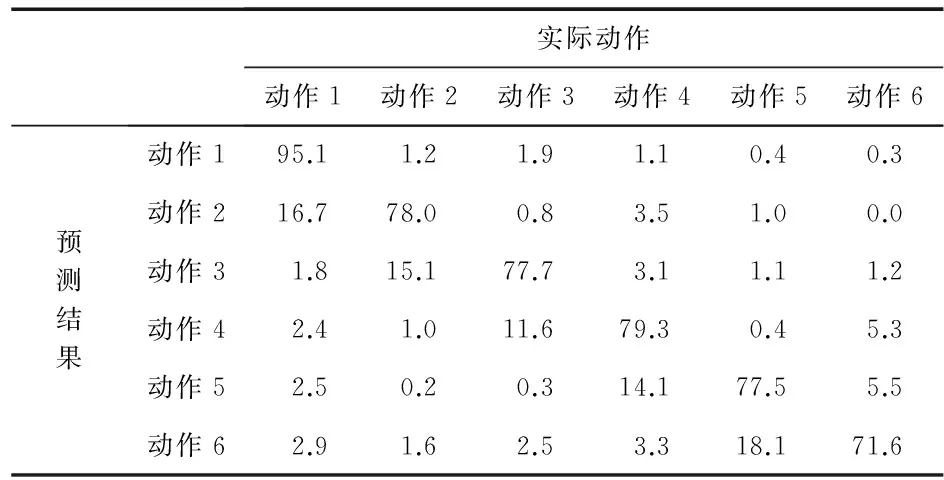
表3 6類動作的混淆矩陣 %
為了消除這種現(xiàn)象的影響,在分析時應(yīng)當剔除動作切換時的數(shù)據(jù)。在舍棄識別結(jié)果時,以動作切換的起始點為參考點,向后數(shù)。圖9顯示了隨著舍棄切換處分類結(jié)果識別率的變化過程,可以看出:休息態(tài)的識別率無變化。因為在實驗中休息態(tài)之前無動作。其他5類動作在舍棄點達到20之后基本無變化。20個點對應(yīng)的時間約為1.37 s,基本符合現(xiàn)實運動情況。當舍棄的點數(shù)達到20時基本上消除了動作切換時對識別率的影響。
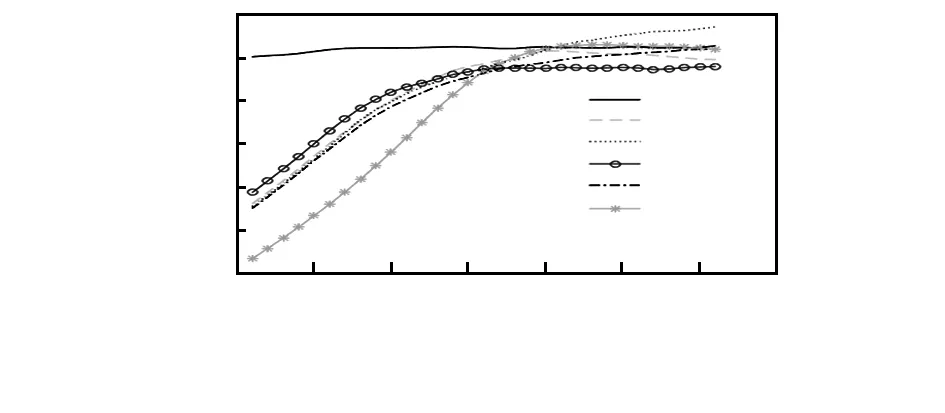
圖9 舍棄點數(shù)和識別率的關(guān)系
在舍棄次數(shù)為20時5名受試者的6類動作的識別率如圖10。可以看出,當舍棄次數(shù)為20次時6類動的識別率均達到了90 %以上。

圖10 舍棄20點后6類動作識別率
4.4 機械臂控制效果
機械臂運動的控制實驗如圖11所示。電極片的貼放位置如前面所述,經(jīng)過51 s 6類動作的訓(xùn)練后,控制者可以通過自身的運動控制機械臂的運動。控制者的屈肘、伸肘、內(nèi)翻手腕、外翻手腕、握拳、休息態(tài)分別對應(yīng)機械臂的屈肘、伸肘、外旋手腕、展拳、握拳、靜止。與驗證識別率時不同,此時控制者可以根據(jù)自己的意愿隨意切換動作。

圖11 實時控制
觀察發(fā)現(xiàn),機械臂可以很好地跟隨手臂的運動。在控制者切換動作時,機械臂的誤動作不明顯。
5 結(jié) 論
論述了整套假肢的設(shè)計方案,包括了假肢的機械結(jié)構(gòu)方案、電氣系統(tǒng)方案和控制算法方案。實驗驗證,發(fā)現(xiàn)通過快速單次訓(xùn)練分類器,6類動作的穩(wěn)態(tài)識別率可以達到90%以上,整個訓(xùn)練時間為51 s。通過在線控制肌電假肢,發(fā)現(xiàn)假肢基本上可以隨著控制者的意圖運動。但在運動的過程中,會存在錯誤識別結(jié)果,這主要是由于控制者在切換動作時,肌電信號變化需要一段時間造成的。在控制機械臂運動時,這種現(xiàn)象體現(xiàn)并不明顯,即機械臂很少出現(xiàn)誤動作的情況:1)由于在動作切換時,分類器的錯誤分類所占的時間很短,在短時間內(nèi)機械臂的運動幅度比較小;2)由于在動作切換時分類器錯誤分類的結(jié)果中多是上一次動作,在控制機械臂運動時體現(xiàn)出的是動作切換時的延遲,并不會造成錯誤的動作。
目前,假肢系統(tǒng)在正常人身上得到了驗證。為了驗證該系統(tǒng)能否用在高位截肢者身上,已經(jīng)和復(fù)旦大學附屬華山醫(yī)院手外科合作,外科醫(yī)生已經(jīng)給幾例截肢者做了靶向肌肉神經(jīng)移植手術(shù),相應(yīng)的研究成果將在未來發(fā)表。
參考文獻:
[1] Farina D,Jiang N,Rehbaum H,et al.The extraction of neural information from the surface EMG for the control of upper-limb prostheses:Emerging avenues and challenges[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering,2014,22(4):797-809.
[2] Reaz M B I,Hussain M S,Mohd-Yasin F.Techniques of EMG signal analysis:Detection,processing, classification and applications[J].Biological Procedures Online,2006,8(1):11-35.
[3] Kelly M F,Parker P A,Scott R N.The application of neural networks to myoelectric signal analysis: A preliminary study[J].IEEE Transactions on Biomedical Engineering,1990,37(3):221-230.
[4] Jiang N,Englehart K B,Parker P A.Extracting simultaneous and proportional neural control information for multiple-DOF prostheses from the surface electromyographic signal[J].IEEE Transactions on Biomedical Engineering,2009,56(4):1070-1080.
[5] Liu H,Yang D,Jiang L,et al.Development of a multi-DOF prosthetic hand with intrinsic actuation,intuitive control and sensory feedback[J].Industrial Robot:An International Journal,2014,41(4):381-392.
[6] 楊大鵬,趙京東,姜 力,等.基于肌電信號的人手姿態(tài)多模式識別方法[J].上海交通大學學報,2009(7):1071-1075.
[7] Farina D,Merletti R,Enoka R M.The extraction of neural strategies from the surface EMG: An update[J].Journal of Applied Physiology,2014,117(11):1215-1230.
[8] Sensinger J W,Lock B A,Kuiken T A.Adaptive pattern recognition of myoelectric signals: Exploration of conceptual framework and practical algorithms[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering,2009,17(3):270-278.
[9] He J,Zhang D,Sheng X,et al.Effects of long-term myoelectric signals on pattern recognition[C]∥International Conference on Intelligent Robotics and Applications,Springer,Berlin Heidelberg,2013:396-404.
[10] Jiang N,Dosen S,Müller K R,et al.Myoelectric control of artificial limbs—Is there a need to change focus[J].IEEE Signal Process Mag,2012,29(5):152-150.
[11] Guo W,Sheng X,Liu J,et al.Towards zero training for myoelectric control based on a wearable wireless sEMG armband[C]∥2015 IEEE International Conference on Advanced Intelligent Mechatronics(AIM),IEEE,2015:196-201.
[12] Parker P A,Scott R N.Myoelectric control of prostheses[J].Critical Reviews in Biomedical Engineering,1985,13(4):283-310.
[13] Wright T W,Hagen A D,Wood M B.Prosthetic usage in major upper extremity amputations[J].The Journal of Hand Surgery,1995,20(4):619-622.
[14] Biddiss E A,Chau T T.Upper limb prosthesis use and abandonment:A survey of the last 25 years[J].Prosthetics and Orthotics International,2007,31(3):236-257.
[15] Liu J,Sheng X,Zhang D,et al.Reduced daily recalibration of myoelectric prosthesis classifiers based on domain adaptation[J].IEEE Journal of Biomedical and Health Informatics,2016,20(1):166-176.
[16] Kuiken T A,Miller L A,Lipschutz R D,et al.Targeted reinnervation for enhanced prosthetic arm function in a woman with a proximal amputation:A case study[J].The Lancet,2007,369(9559):371-380.
[17] Fang Y,Zhu X,Liu H.Development of a surface EMG acquisition system with novel electrodes configuration and signal representation[C]∥International Conference on Intelligent Robotics and Applications,Springer,Berlin Heidelberg,2013:405-414.
[18] Chen X,Zhang D,Zhu X.Application of a self-enhancing classification method to electromyography pattern recognition for multifunctional prosthesis control[J].Journal of Neuroengineering and Rehabilitation,2013,10(1):1.
[19] Englehart K,Hudgins B.A robust,real-time control scheme for multifunction myoelectric control[J].IEEE Transactions on Biomedical Engineering,2003,50(7):848-854.
[20] Englehart K,Hudgins B,Parker P A,et al.Classification of the myoelectric signal using time-frequency based representations[J].Medical Engineering & Physics,1999,21(6):431-438.
[21] Phinyomark A,Phukpattaranont P,Limsakul C.Feature reduction and selection for EMG signal classification[J].Expert Systems with Applications,2012,39(8):7420-7431.
[22] Zhou P,Lowery M M,Englehart K B,et al.Decoding a new neural-machine interface for control of artificial limbs[J].Journal of Neurophysiology,2007,98(5):2974-2982.
猜你喜歡
作文周刊·小學一年級版(2022年16期)2022-05-07 11:28:30
作文周刊·小學一年級版(2021年8期)2021-07-07 11:00:47
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
電影故事(2015年30期)2015-02-27 09:03:12
七彩語文·低年級(2014年10期)2015-01-14 14:46:27
