基于LabVIEW的自動焊接機焊接腳檢測方法
2018-04-10 06:16:50汪成龍黃余鳳陳銘泉林浩斌陳澤濤
制造業自動化 2018年1期
關鍵詞:檢測
汪成龍,黃余鳳,陳銘泉,林浩斌,陳澤濤
(惠州學院電子信息與電氣工程學院,惠州 516015)
0 引言
隨著人力成本的提升,國內制造業加快了自動化改革的步伐。在自動化焊接技術中檢測焊接腳的正確與否,通常讓工人肉眼進行品質檢測,但人眼具有視覺暫留,視覺疲勞等特點,容易造成誤判和檢測效率低等問題,因此為提高焊機技術行業生產效率和品質檢測準確率,亟待研究一種快速精準的檢測方法。當代自動化技術融入焊接技術可以給焊接行業帶來新鮮血液,因此自動化焊接技術逐漸成為焊接行業的主流[1]。相對之前的焊接機,自動化焊接機有很多優勢,但自動焊接機焊接腳的檢測仍然面臨著許多難題。
目前,自動焊接機焊接腳檢測仍然是以工人檢測為主,但此方法效率低,準確率不高,因此有必要研究一種速度快、準確率高的自動檢測方法。
本文首先對采集到的自動焊接機焊接腳圖片進行預處理,將圖片中的噪音消除并且將雜質過濾掉;然后利用模板匹配和建立坐標系對圖片進行定位操作;接著通過圖像掩模準確地從圖像中提取需要的區域,將不需要的區域屏蔽;最后經過二值化和形態學處理顯示出焊接腳中出錯的區域。實驗表明,該方法能準確穩定地檢測出焊接腳錯誤區域,且檢測速度快、準確率高。
1 圖像預處理
1.1 灰度化圖像
灰度化圖像是將彩色圖像轉化成為灰度圖像的過程。現在大部分的彩色圖像都是采用RGB顏色模式,但這種方式占用內存比較大,在處理時需要分別對RGB三種分量進行處理。如果在進行圖像處理時先將圖像轉化為灰度圖像后再進行下一步的操作,會減少工作量。經過灰度化處理的圖像,用0~255代表其灰度值,0是黑色,255是白色。中間的取值分別代表不同的灰色。
圖像的灰度化處理有兩種常用方法:
1)平均值算法,即將當前像素的R、G、B三個分量求平均值,即:

2)加權平均法,這種方法的特點在于人眼對于各種顏色的敏感程度不同,因此對三個分量取不同的權值來進行加權平均計算,而人眼對于綠色的敏感程度較高,紅色次之,藍色最低,因此,以下公式能更好的得到灰度化圖像:

通過以上任一方法得到的Gray值就是灰度化值。
1.2 濾波處理
在獲取圖像時,由于外界因素的干擾,圖像中不時會呈現少許噪聲,干擾了對圖像的下一步操作。故在竭力保存圖像特點的情況下,需要消除其噪聲,過濾掉干擾信號,讓后續處理可以更加準確。中值濾波[2]是將目標區域內的最大最小值全部視為噪聲,用中值代替他們,讓周圍的點更接近真實值。這種非線性濾波算法,可以保留圖像細節特征。中值濾波的算法相對比較簡單,速度快,而且除噪效果好,特別是針對椒鹽噪聲(脈沖噪聲)時有很好的效果。
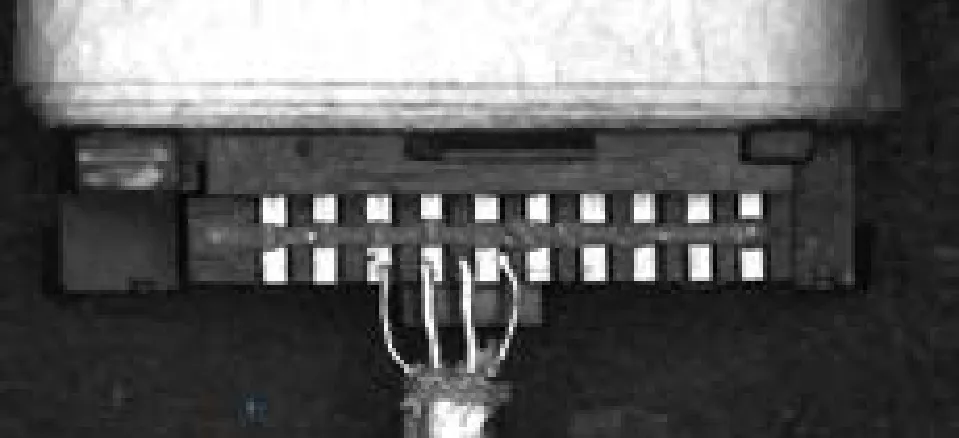
圖1 中值濾波后的圖像
2 基于模版配的圖像定位法
模版匹配就是從圖像中獲取部分小圖像作為模版,或者將已有的圖片作為模版,然后根據小圖像在大圖像中搜索有相同圖像的目標,并得到其相應坐標位置。設計參數可以使圖像在相似度低一點、有一定旋轉角度的圖像也能定位出來。
模版匹配在圖像處理中是一個很重要的過程,經過模版匹配對其某個部位進行定位。確定坐標系,使其他圖片能被同樣的程序進行操作,或者在同一圖片中獲取相同的部位,然后進行后續操作[3]。
模版匹配常用的算法有兩種,分別是平方差匹配和相關匹配,平方差匹配是利用平方差來進行匹配,當匹配參數越接近0時,匹配值越高,反之越小。其算法 如下:

而相關匹配正好相反,其得出的匹配參數越大時,匹配值越高,反之越低,其算法如下:

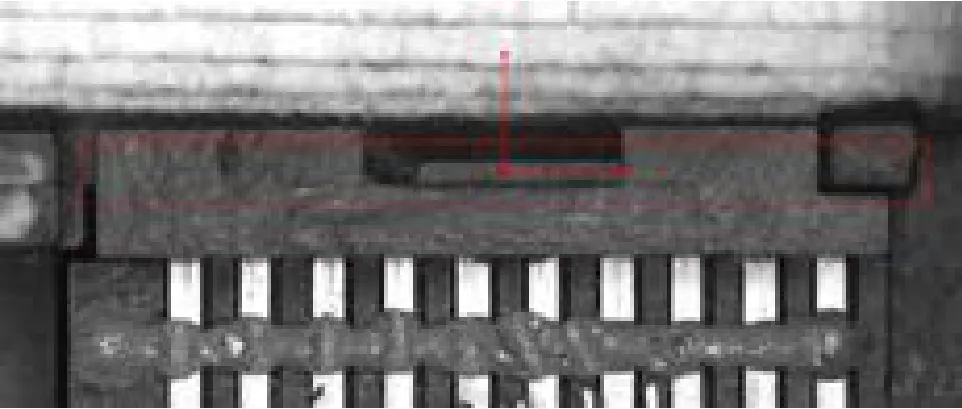
圖2 建立的模板和坐標系
3 圖像特征提取
3.1 圖像掩模
圖像掩模,一般指的是用形狀或者圖像對需要處理的圖像進行掩蓋,保留掩蓋部位的圖像值,把掩蓋區域外的圖像值清零。圖像掩模可以準確的從圖像中提取出需要的區域,還可以把不感興趣或者不需要處理的區域屏蔽掉。
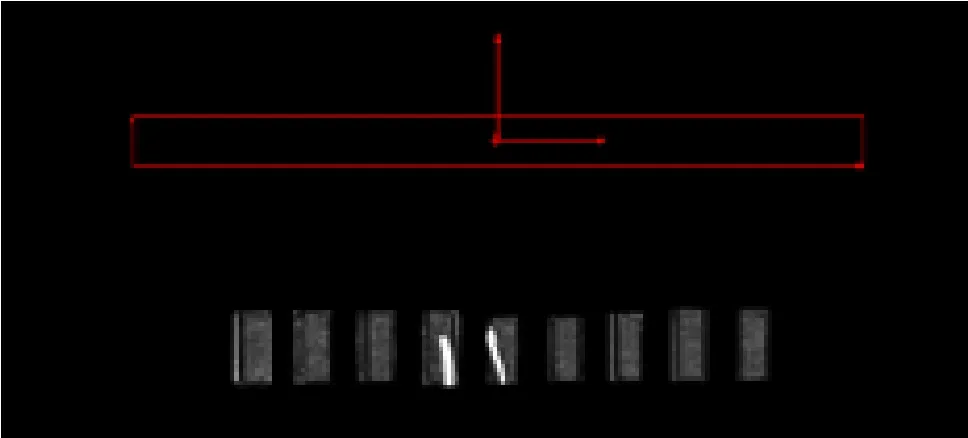
圖3 圖像掩模處理后的圖像
3.2 二值化
將灰度化后的圖像設定一個閾值A,圖像中灰度值大于A的部分全部變成白色,小于A的部分全部變成黑色,就成了新的圖像[4]。新的圖像由灰度圖像轉化而來,使其0~255共256個灰度值減少到只有0和255兩個灰度值,雖然會使圖片信息數據丟失非常多,但相對于進行圖像掩模后得到的部分區域是有用的。設置不同A的數值,獲取的圖像也不同,通過不斷改變A的值而得到需要的二值化圖像。圖像在經過二值化處理之后,圖像的數據就變少了,提高了圖像處理效率。

表1 實驗結果
3.3 形態學濾波
圖像在經過二值化處理之后,由于圖像干擾和噪聲的存在,總存在著一些被錯誤分割出來的孤立點,于是需要用到形態學濾波[5]把這一部分小區域過濾掉,使圖像的主體更能凸顯出來。
形態學濾波的算法一般有四種:腐蝕運算、膨脹運算、開運算和閉運算。腐蝕運算可以消除圖像中小的物體。膨脹是將物體與有和其他物體接觸的地方合并到一起并且向外部膨脹。開運算可用于消除物體的邊界使其變得平滑,但是又不明顯地改變其面積。閉運算可用于填充物體內細小空洞、以及填充物體的邊界,使其變得平滑但是又不明顯地改變其面積。
圖4~圖6是采用不同的閾值進行腐蝕運算后得到的圖像,經調試得知,當閾值設定為178時,圖像最 清晰。

圖4 閾值為160濾波后的圖像

圖5 閾值為180濾波后的圖像
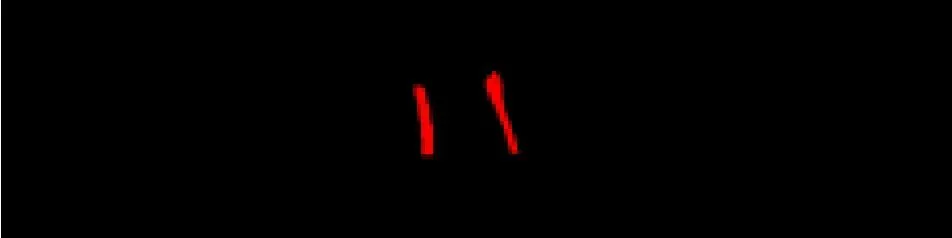
圖6 閾值為200濾波后的圖像
4 結論
以6張焊接腳圖片為樣本,利用LabVIEW編寫檢測軟件,軟件界面如圖7所示。

圖7 焊接腳檢測系統軟件界面
表1表明,樣本的匹配值都高于950,匹配相似度高,檢測成功率都是100%。
得到結論如下:
1)檢測穩定性高:對樣本的定位準確,匹配 值高。
2)檢測準確率高:對樣本識別準確率達100%。
3)檢測范圍:該軟件的編程過程簡潔方便,在該軟件平臺基礎上修改算法,可設計其他檢測功能。
參考文獻:
[1]王彬.我國焊接自動化技術的現狀與發展趨勢[J].焊接技術,2000,29(6):1-3.
[2]楊小靜.基于LabVIEW和Matlab的圖像去噪研究[D].2014:23-24.
[3]田娟,鄭郁正.模板匹配技術在圖像識別中的應用[J].傳感器與微系統2008,27(1):2-3.
[4]朱軍民,黃磊,劉昌平.圖像二值化方法比較[J].2002:110-112.
[5]吳辰夏.二值化圖像特征及其應用[D].2013:2-4.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
