擴頻調制的偽碼跟蹤技術分析
2018-04-10 07:08:50張麗娜
無線電工程 2018年5期
關鍵詞:信號
張麗娜
(中國電子科技集團公司第五十四研究所,河北 石家莊 050081)
0 引言
由于擴頻系統具有良好的保密性、靈活的信道分配以及較強的抗干擾、抗多徑衰落的能力等優點[1],它在軍用和民用通信中得到了廣泛應用[2-3]。在擴頻調制中常采用偽隨機序列作為擴頻碼與數據進行擴頻傳輸[4],在接收端擴頻信號解擴前需要先完成本地碼字和接收信號擴頻碼字的精確同步,這就需要在解調端先完成對擴頻信號的捕獲和跟蹤[5]。而通過合理的算法對接收擴頻信號的捕獲僅僅完成擴頻碼的粗略同步[6],接收到的擴頻碼和本地碼字并未完全對齊[7],還需要啟動擴頻碼跟蹤來進一步減小本地碼字和擴頻碼信號的相位差并跟蹤其相位變化。
文獻[8]介紹了擴頻碼跟蹤的算法和其中關鍵模塊的設計,但實際實現中擴頻碼跟蹤參數的設置對解調性能影響較大,主要針對連續擴頻系統的擴頻碼跟蹤技術中的關鍵參數進行分析仿真。
1 擴頻調制解調原理
基帶擴頻調制主要完成擴頻調制、成型濾波,實現框圖如圖1所示。編碼后的數據和擴頻碼發生器輸出的擴頻碼進行擴頻調制,然后進行成型濾波,成型濾波采用截短奈奎斯特升余弦函數,截取長度為8個符號持續期,8倍內插,成型后的數據經過D/A變換后,再經過低通濾波器消除數模轉換后的高頻諧波分量,輸出信號送給中頻調制模塊進行調制。基帶解調框圖如圖2所示,主要包括模數轉換、數字下變頻、擴頻碼捕獲跟蹤、相關解擴、頻率估計和載波提取等模塊。
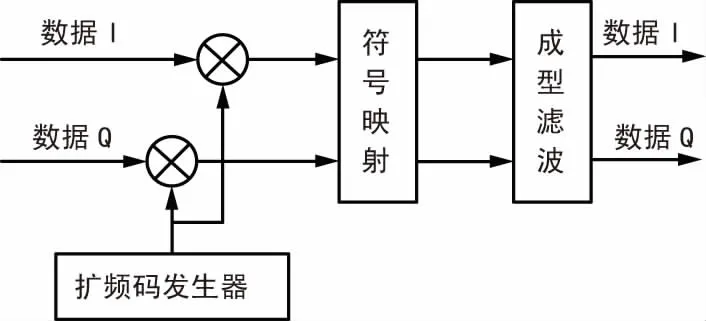
圖1 基帶擴頻調制框圖
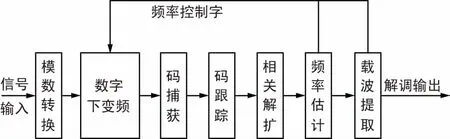
圖2 基帶擴頻解調框圖
2 擴頻系統中的碼跟蹤
2.1 理論分析
在連續擴頻系統中,擴頻碼的跟蹤常采用延遲鎖定環,它是一種非相干鎖定環[9],不受載波誤差的影響,因此可以在本地載波恢復前就可以精確地實現本地碼字和接收擴頻信號的碼同步。
假設輸入信號采用BPSK調制方式,在無噪聲的情況下,輸入擴頻信號可以表示為:
(1)
式中,P為接收信號功率;ωc和φ分別為接收信號的剩余載波頻率和相位;c(t)為擴頻碼。
接收端的本地擴頻碼cr(t)是與擴頻碼c(t)相同的序列,即cr(t)=c(t-T),匹配濾波器中心頻率與輸入信號載頻偏差表示為Δω。
解擴輸出表示為:
cos(Δωt+φ)+n(t))。
(2)
如果T=Td,則有
(3)
假設碼定時跟蹤無誤差時認為擴頻信號的解擴沒有信噪比損失,解擴損失僅在于碼跟蹤定時誤差帶來的損失。
如果T≠Td,令τ=T-Td,則
cos(Δωt+φ)+n(t))。
(4)
2.2 設計分析
碼跟蹤定時框圖如圖3所示。偽碼跟蹤的輸入是基帶信號和本地偽碼序列,輸出反饋給偽碼發生器。偽碼跟蹤關鍵在于鑒相算法的選擇,常用的是超前—滯后鑒相算法,該算法對輸入的幅度要求較高,采用歸一化的鑒相算法,消除幅度對跟蹤性能的影響。偽碼跟蹤環路需要產生3路本地碼:超前碼、即時碼和滯后碼,3路碼的相位依次相差半個碼片。輸入的I、Q兩路信號分別與3路本地碼進行長度為N的相干累加,再進行M次非相干累加,3路累加結果送給碼鑒相器,鑒相誤差通過環路濾波控制NCO產生本地擴頻碼鐘,從而控制本地碼產生器產生本地碼字[10]。
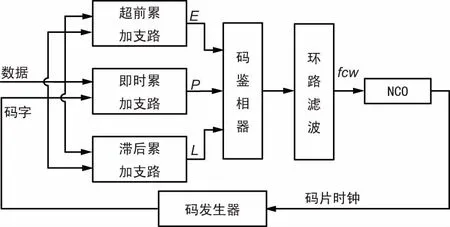
圖3 碼跟蹤環框圖
超前、滯后和即時3個支路的輸出是數據和相應延時后的碼字經過相干累加和非相干累加后的功率值,表示如下:
(5)
(6)
(7)
碼環鑒相算法表示為:
(8)
在碼環跟蹤中,鑒相算法固定以后,需要重點分析的參數是數據和碼字的相干累加長度、非相干累加次數以及環路濾波參數,設計中環路濾波采用二階環濾波[11-12],在保證環路入口幅度和固定信噪比的條件下可以固定環路參數,本文重點分析相干累加長度和非相干累加次數這2個參數。
2.3 偽碼跟蹤誤差對性能影響分析
由前面分析,假定解擴損失僅在于碼跟蹤定時誤差帶來的損失。仿真碼跟蹤定時誤對解擴信噪比的影響,如圖4所示。
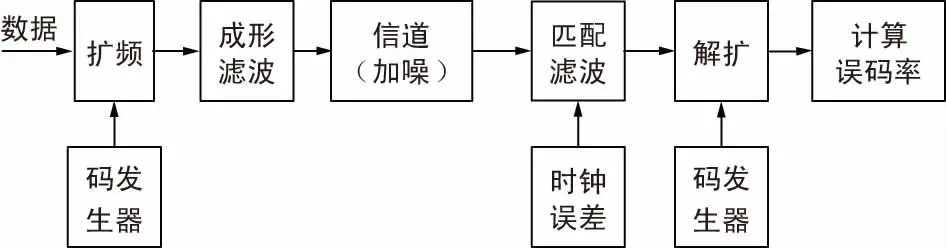
圖4 仿真模型示意
仿真條件:8倍采樣,擴頻比為64,無頻偏,仿真次數5 000,跟蹤定時誤差τ分別為0、1/8和1/4碼片時,解擴后誤比特率仿真如圖5所示。當定時誤差偏差為1/8碼片時,解擴信噪比損失小于0.2 dB,當定時誤差偏差為1/4碼片時,解擴信噪比損失更大。
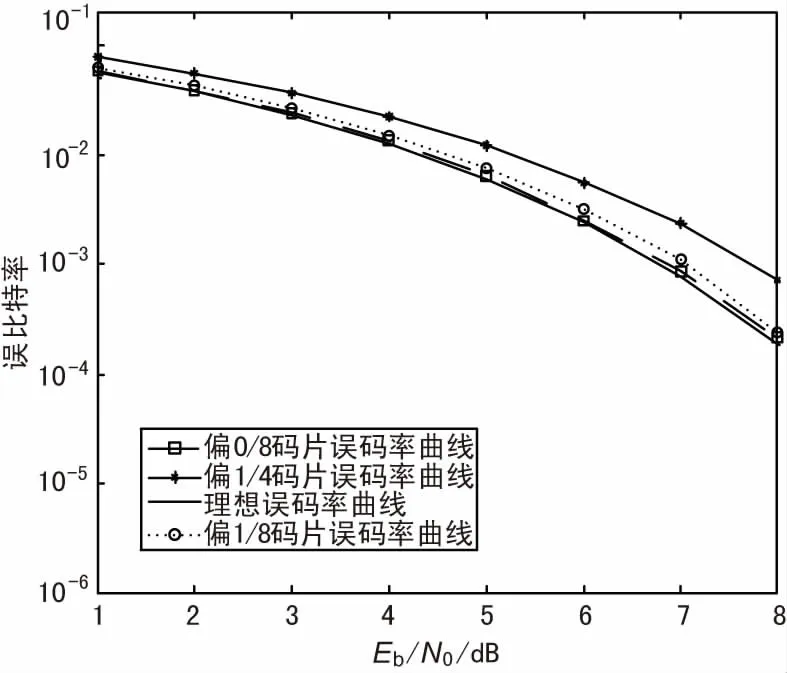
圖5 不同定時誤差與解擴輸出信噪比的關系
2.4 偽碼跟蹤相干累加長度分析
相干累加時間的選擇對偽碼跟蹤性能有著重要的影響,相干累加時間越長,偽碼跟蹤環的熱噪聲誤差越低,信噪比越好,但是過長的累加長度會導致偽碼跟蹤環不穩定,嚴重情況下可能失鎖。不考慮解擴本身的信噪比損失,解擴后的輸出信噪比是衡量相干累加長度的一個重要指標[13-14],而碼跟蹤支路中數據和碼字的相干累加相當于擴頻碼解擴。所以相干累加長度的選擇可以用累加輸出信噪比為標準來衡量。
相同條件下仿真相干累加長度對累加器輸出信噪比的影響,仿真結果如圖6所示。可知相干累加長度只要大于等于擴頻比即可,在工程實踐中,如果系統要求擴頻比是在一定范圍內可變的,相干累加長度可參照最大擴頻比的情況進行設計。
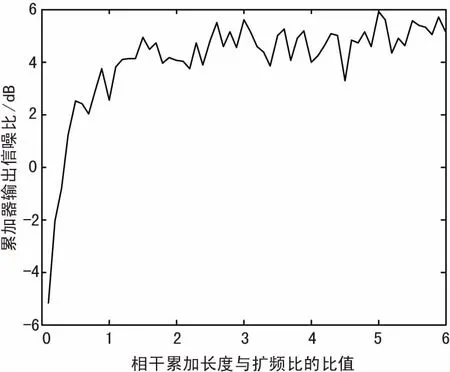
圖6 累加長度與相關器輸出信噪比的關系
2.5 偽碼跟蹤非相干累加次數分析
碼跟蹤支路中相干累加長度確定后,固定相干累加長度,變化非相干累加次數,觀察鎖定后帶內波動,并觀察其對信噪比的影響。
仿真條件:收發時鐘偏差5×10-7,載波頻偏1/4符號率,符號信噪比為3 dB,擴頻比為64,相干累加長度64,非相干累加次數8時的跟蹤定時誤差如圖7所示,跟蹤環鎖定后的帶內波動方差為0.002 24,均值為0.014。

圖7 跟蹤定時誤差曲線
根據以上仿真結果,定時誤差滿足(帶內波動方差=0.002 24,均值=0.014)條件時,得出誤碼率仿真曲線如圖8所示。可以看出,在3 dB時信噪比損失小于0.1 dB。
將非相干累加次數4,重復以上仿真得到跟蹤環路鎖定后帶內波動方差0.004,均值0.02,定時誤差滿足此條件時,可以得出,在3 dB時信噪比損失0.19 dB。
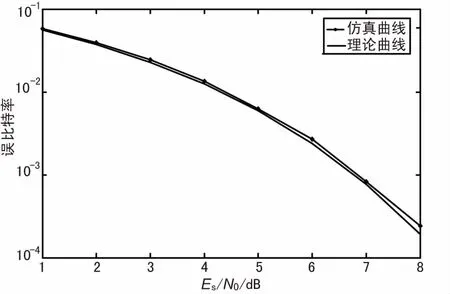
圖8 非相干累加次數8時的誤碼率曲線
3 結束語
對擴頻解調中的偽碼跟蹤技術進行了分析和仿真,主要針對其中相干累加長度和非相干累加次數2個參數進行重點分析,得出相干累加長度的設計可以取最大擴頻比,并通過合理地設計非相干累加次數,可以使偽碼跟蹤誤差[15]導致的解調損失小于0.1 dB,為相關設計實現提供參考。
[1]王秉鈞.擴頻通信[M].天津:天津大學出版社,1993:112-153.
[2]樊昌信,曹麗娜.通信原理(第6版)[M].北京:國防工業出版社,2006:379-400.
[3]孫晨華,陸洲,吳隆恕.衛星通信[M].石家莊:中國電子科技集團公司第五十四研究所,2012:68-78.
[4]CHEN Zhijun,ZHAO Jiang,GUO Suli,et al.A PN Code Acquisition Scheme in the Presence of Data Modulation and Doppler Shift[C]∥Proceedings of the Sixth International Conference on Machine Learning and Cybernetics,2007:19-22.
[5]張蔚,張宗橙.直接序列擴頻捕獲的門限調整技術與混合方案[J].江蘇通信技術,2000,45(7):45-49.
[6]夏運兵,龔文斌,姜泉江,等.GPS信號捕獲算法Matlab/Simulink仿真[J].電子設計工程,2015(3):11-13.
[7]康亞楠.高動態衛星導航信號快速捕獲算法研究與實現[D].石家莊:河北科技大學,2016:18-22.
[8]紀捷先,樊華.擴頻通信系統的偽碼跟蹤技術研究[J].電子質量,2010(1):19-21.
[9]祁東杰.大頻偏、高動態擴頻信號捕獲跟蹤技術及其FPGA實現[D].北京:北京理工大學,2015:29-30.
[10] 楊再秀,王茂磊,郭曉峰,等.基于通用環路的GNSS碼跟蹤性能分析方法[J].無線電工程,2015,45(7):45-49.
[11] 苗江宏,馬國寧,賀寓東,等.非相干擴頻接收機偽碼跟蹤環設計及FPGA實現[J].信息與電子工,2010,8(6):648-650.
[12] 倪少杰,劉瀛翔.理想帶限條件下碼跟蹤環路的精度分析[J].國防科技大學學報,2012,34(6):171-173.
[13] 王浩然,郝學坤.非相干擴頻捕獲的匹配濾波器參數分析[J].無線電工程,2011,41(4):29-30.
[14] 張大衛,胡修林,李晨.衛星定位接收機高精度偽碼跟蹤的設計與實現[J].電子技術應用,2009(9):108-110.
[15] 孫琳.北斗二代導航接收機的捕獲跟蹤技術研究[D].成都:電子科技大學,2016:14-52.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06