純電動車自適應巡航縱向控制方法研究?
2018-04-11 11:14:12李天驕孫成偉
汽車工程 2018年3期
初 亮,李天驕,孫成偉
前言
自適應巡航系統的縱向控制算法是連接上層自適應巡航決策層算法和下層車輛執行機構的橋梁。接受來自自適應巡航系統決策層算法的期望加速度或減速度信號,并轉化為對執行層驅動或制動機構的控制信號,是保證自適應巡航系統實現效果的關鍵所在。
由于車輛驅動、制動系統十分復雜,有著極強的非線性和耦合性,難以建立數學模型來精確描述。因此國內外學者對于自適應巡航縱向控制算法多基于無模型或少模型控制。文獻[1]中利用CarSim與Simulink建立了一種車輛縱向動力學控制模型,并基于最優控制和PID控制設計上下兩層的自適應巡航控制系統。文獻[2]中應用參數自整定模糊-PID控制,通過模糊規則對PID的3個參數進行調節實現汽車縱向控制。文獻[3]中基于模糊邏輯和滑模控制理論設計雙層自適應巡航系統,依據車輛傳動系統動力學特性確定模糊控制規則并構建了驅動、制動切換邏輯曲線保證系統協調性。
以上文獻關于汽車縱向動力學控制方法多基于車輛本體特性整定PID參數或建立模糊控制規則。若外界環境(坡度、風速等)發生變化,將會對車輛加速度控制精度產生較大影響。目前對于傳統發動機車輛自適應巡航縱向動力學控制算法研究較多。對于純電動車縱向動力學控制算法的研究較少。對于純電動車自適應巡航系統而言,驅動控制機構為電機;考慮到制動能量回收特性,純電動車制動控制機構包括電機和液壓制動系統。相較于傳統車,制動控制更為復雜。
本文中首先設計了自適應巡航系統制動過程制動力分配策略,考慮外界環境風速和坡度對控制系統的干擾,建立基于加權最小二乘擬合的模式切換策略,并基于迭代學習算法設計驅動和制動控制方法。基于最優線性二次型設計上層決策算法,并在CarSim和Simulink下聯合仿真完成算法驗證,并與傳統PID控制方法結果進行對比。
1 制動力分配策略
本文中研究的目標車型為前軸驅動的純電動轎車構型。電機通過主減速器對車輪施加驅動力矩或制動力矩。液壓制動力由ESC調節。管路布置按照II型布置。通過控制ESC的閥和液壓泵電機電流實現前、后軸輪缸壓力的主動控制。
制動力分配包括前、后軸制動力分配和電、液制動力分配。前、后軸制動力分配受到法規的嚴格限制[4],如圖1所示。其中B線規定前軸分配制動力的最大值。C線規定后軸分配制動力的最大值。為充分利用前軸電機制動回收制動能量并考慮整車安全性,基于前期對于制動能量回收系統的研究[5],設計如圖2所示制動力分配策略。
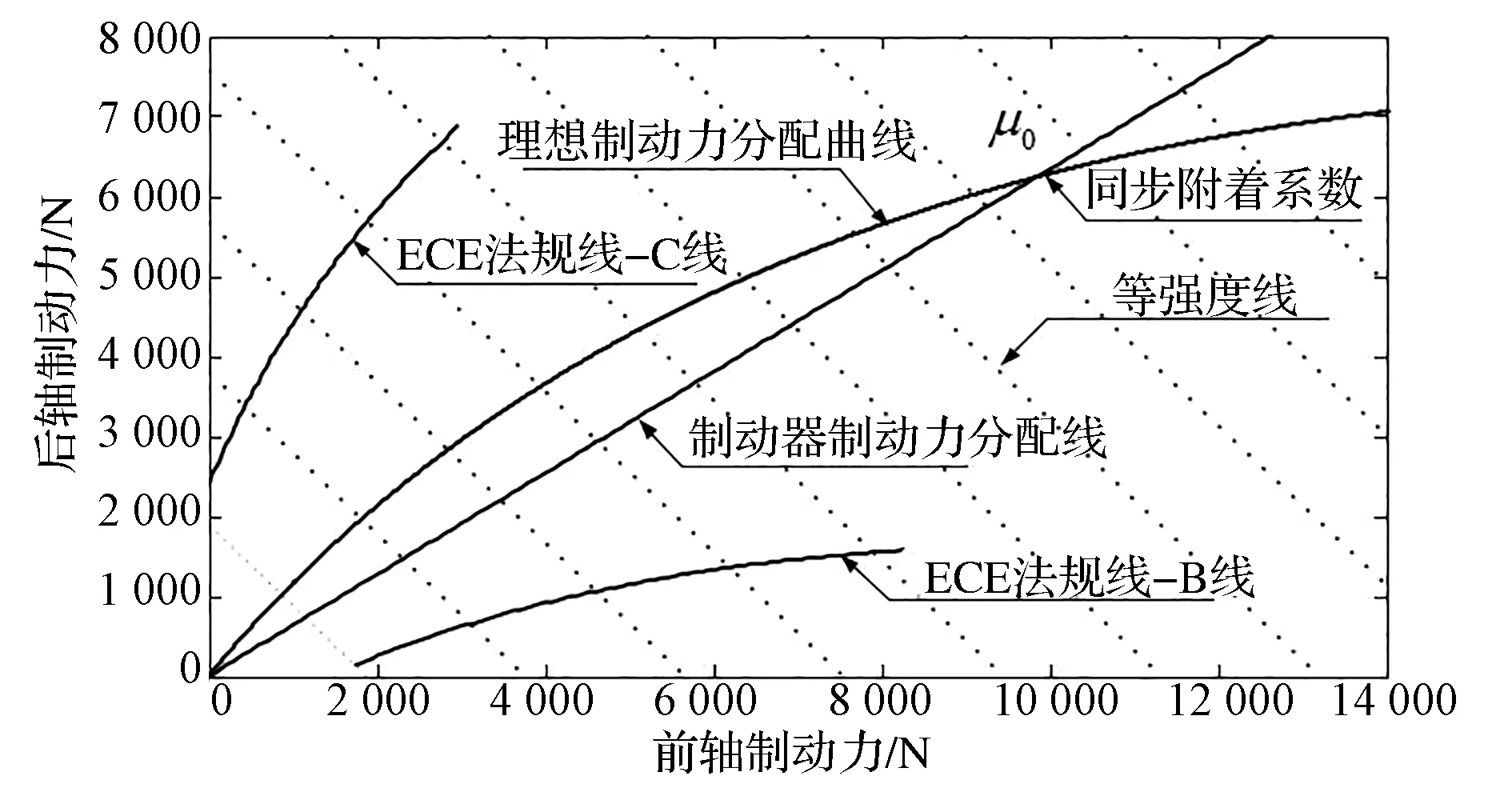
圖1 法規制動力分配線
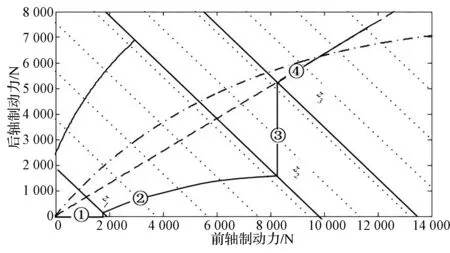
圖2 制動力分配策略
當制動強度z<z1時,主要由前軸電機施加制動力,液壓系統不參與制動;當制動強度z1<z<z2時,達到法規下線,后軸液壓參與制動,制動力沿著法規下線分配;當制動強度z2<z<z3時,電機制動力達到最大值,此時增加的制動力由后軸補償。當z>z3時,為充分利用地面附著條件,制動力分配按照原車B線分配。z1,z2和z3按式(1)[6]計算:
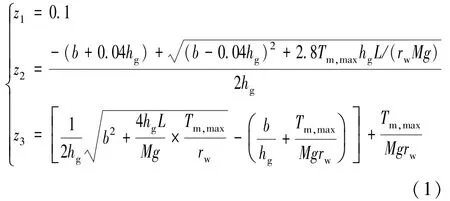
式中:b為質心到后軸距離;L為質心高度;rw為輪胎滾動半徑;hg為質心高度;Tm,max為電機最大制動轉矩;M為整車整備質量。
2 模式切換策略
由于驅動機構和制動機構為兩套不同的系統,二者不能同時工作。因此需要一種模式切換策略確定工作機構。傳統方式一般按照期望加速度0為界劃分驅動和制動模式。然而該種方法未考慮傳動系統阻力及外界阻力的影響。文獻[7]中提出了一種滑行試驗方法確定模式切換邏輯曲線。取節氣門開度為0做滑行試驗,標定出不同速度下的最大減速度值,以此確定驅動制動切換的邏輯曲線。然而該種方法未考慮外界環境變化(車速、坡度變化)對切換曲線的影響。本文中采用基于加權最小二乘擬合算法確定模式切換邏輯曲線。
根據車輛驅動力行駛阻力的分析[8],在車輛滑行狀態時,其加速度a和速度v存在如下的二次關系式:

由于行駛過程中,車輛受到的坡道阻力和空氣阻力會由于道路坡度和風速的變化而變化,因此式中的系數A,B和C數值也會不斷變化。本文中采用最小二乘擬合的方法實時辨識關系式參數,對之前觀測的車輛速度和加速度數據進行擬合,并預測當前速度下的切換基準加速度。考慮到觀測數據的時效性,變化后的環境信息往往蘊含于新觀測的數據點中,而與先前觀測數據點的關系逐漸減弱。引入遺忘因子來減少早期觀測數據對于擬合結果的影響。
定義觀測數據隊列長度為20,遺忘因子λi∈(0,1),與觀測時間呈正比例關系,如式(3)所示。觀測數據點越靠后,遺忘因子越大,相應觀測數據點的準確度也就越高。

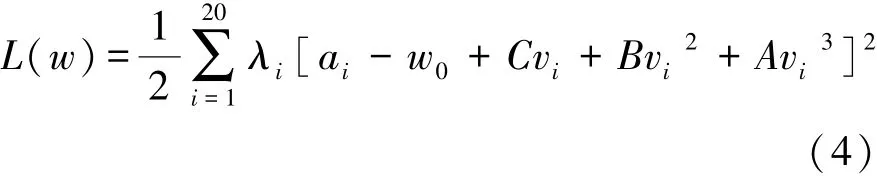
定義觀測數據 (vi,ai)(i= 1,2,3,…,20) 為前20個采樣周期觀測到的速度和加速度值。列解關系式(4)求取各觀測點到曲線偏差平方和L(w)最小時的關系式系數A,B和C。
外界環境的變化會導致預測的基準加速度實時變化,可能會導致系統模式的頻繁切換,將加速部件的磨損老化,也會導致車內乘員不舒適的駕乘感覺。因此,對切換基準加速度a0曲線上下定義2H的緩沖區間,定義緩沖區間H=0.1m/s2,如圖3所示。當加速度達到區間上限a0+H時,系統進入驅動模式;當加速度達到區間下限a0-H時,系統進入制動模式;當加速度在區間內時,系統保持當前工作模式。
3 基于迭代學習的縱向控制策略
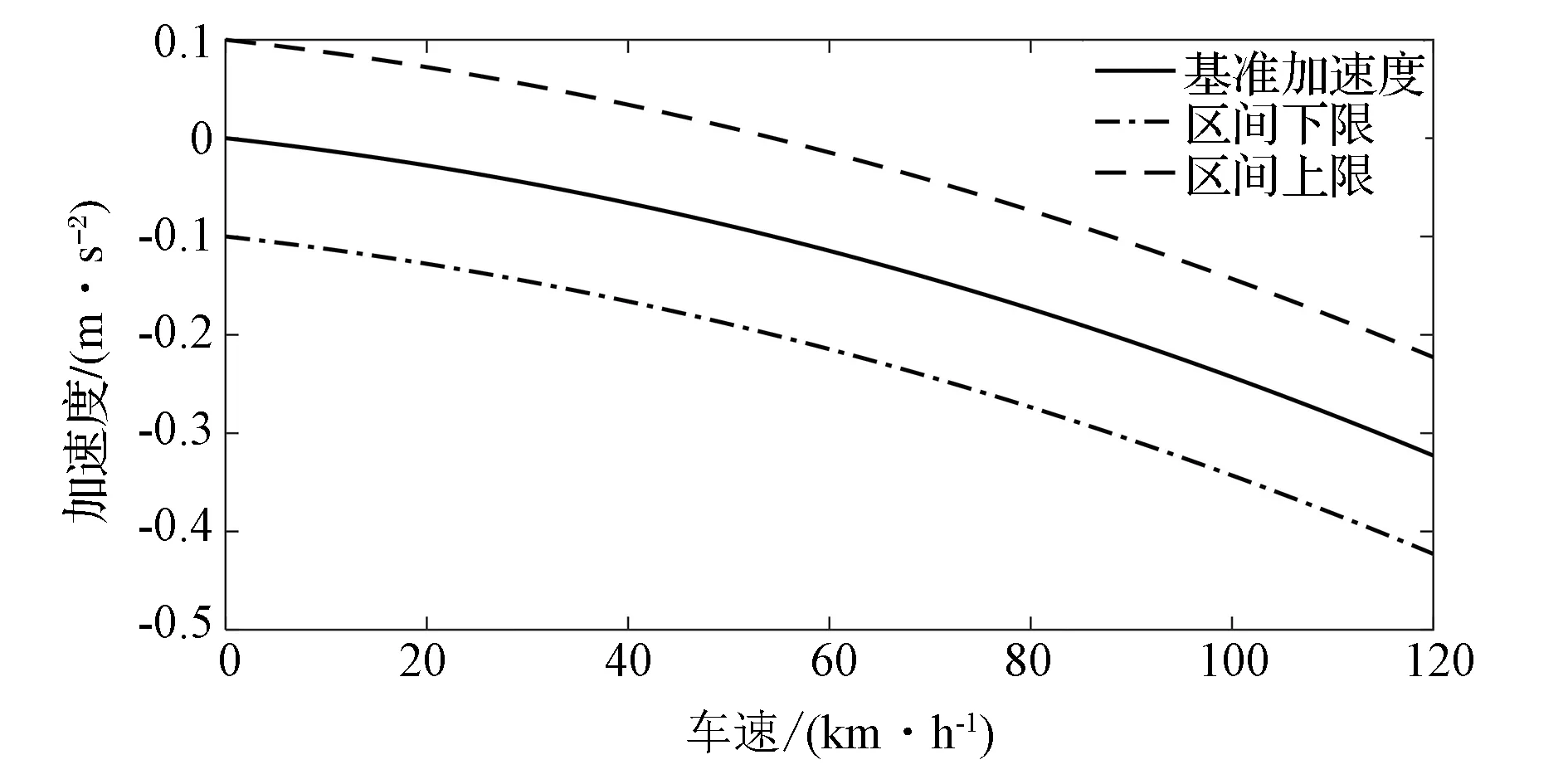
圖3 模式切換曲線
自適應巡航系統縱向動力學控制策略的目標是控制執行機構使車輛加速度穩定跟隨期望加速度的變化。第2節所述的模式切換策略計算得到的基準加速度可盡可能抵消道路坡度和風速對控制系統的干擾。目前研究人員主要采用的控制方法包括基于數值查表的控制方法、基于縱向動力學模型的控制方法和經典PID控制方法。
其中基于縱向動力學模型的控制方法,由于系統的強非線性和耦合性,很難構建出準確的數學模型,導致控制效果不精確。基于數值查表的控制方法,通過前期試驗標定建表,準確度較高,然而針對于不同車型需要重新標定[9],因此該方法成本較高、移植性差。經典PID控制器方法結構簡單,穩定性好,可靠性高。然而經典PID控制方法多基于時不變控制系統設計,當目標工作點快速變化時,控制性能較差[10]。
迭代學習控制方法是一種帶有自學習能力的控制算法。其根據過去的輸入和誤差的跟隨效果來優化當前控制輸入。迭代學習控制方法不需要系統本身的精確模型,對于非線性系統和時變系統有著較強的適應能力[11]。
迭代學習控制系統結構為

式中:t∈[0,T],T表示一個工作周期;uk(t)為第k次迭代系統輸入量;ek(t)為第k次迭代的輸出誤差量;yd(t)為期望輸出量;yk(t)為第k次迭代系統輸出量;U是學習律。迭代學習的基本原理是依據上一周期系統的控制量uk(t)和系統輸出誤差ek(t)對當前周期的控制量uk+1(t)進行修正。常用的迭代學習學習律主要有P型、PI型、PD型等。由于車輛縱向動力學控制具有一定的滯后性,利用PD型學習律構建驅動和制動的控制器:
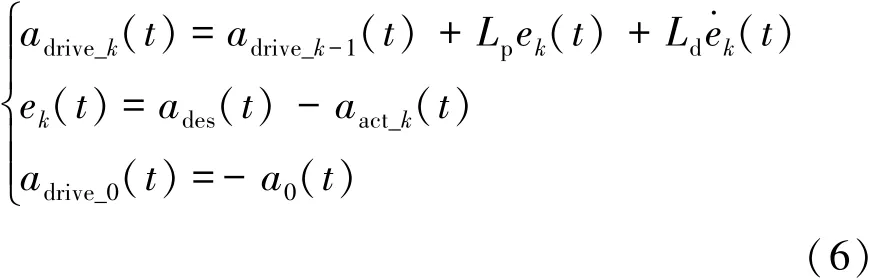
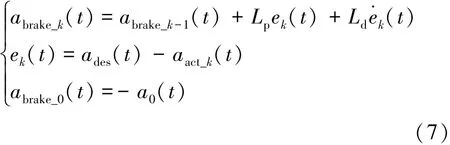
式中:adrive為輸出至驅動系統的加速度修正量;abrake為輸出至制動系統的加速度修正量;Lp和Ld為學習增益因子;ades為目標加速度值;aact為實際汽車加速度值;adrive_0和 abrake_0為迭代初值。
為了抵消外界行駛阻力變化對系統控制的干擾,設定迭代初值加速度為基準加速度作為補償。
通過迭代學習算法可計算得到修正后加速度值,最后的控制量是電機驅動或制動轉矩和制動系統輪缸壓力。因此還需要對修正后的加速度作進一步的計算。
本文中純電動汽車沒有變速器,電機的轉矩直接通過主減速器、差速器傳遞至車輪克服行駛阻力,電機驅動轉矩為

式中:Tdrive為電機驅動轉矩;M為整車質量;ades為期望加速度;Rtire為輪胎滾動半徑;η為傳動效率;i為傳動比。
制動系統分為液壓制動和電機制動,為更多回收能量,需要電機承擔盡可能多的前軸制動力Ff_motor,不足部分由前軸液壓制動Ff_hyd補償。定義Cf和Cr分別為前、后輪液壓制動力矩與輪缸壓力轉換系數,單位為N·m/MPa。則液壓制動系統前軸輪缸制動壓力pf、后軸輪缸制動壓力pr和電機制動轉矩Tbrake為
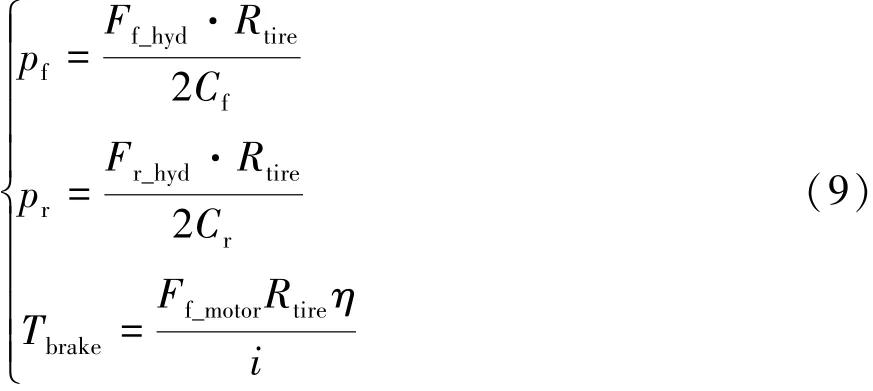
其中,前后軸制動力和電機制動力由制動力分配策略獲得。
基于迭代學習的電動車ACC縱向控制方法流程如圖4所示,由決策層算法產生期望加速度作為模式切換策略的輸入。若模式切換策略仲裁為驅動模式,利用驅動迭代學習算法修正期望加速度,修正后的加速度轉化為電機驅動轉矩信號,發送至電機控制器。若仲裁為制動模式,利用制動迭代學習算法修正期望減速度,修正后的減速度輸入至制動力分配策略,輸出前后軸分配的制動力。前軸制動力首先由電機承擔。電機由于受到外特性、電池SOC等因素影響,電機制動力可能無法滿足前軸需求,此時由前軸液壓制動力補償。前、后軸分配制動力轉化為電機制動轉矩信號和前、后軸制動壓力信號分別發送至電機控制器和制動控制器。
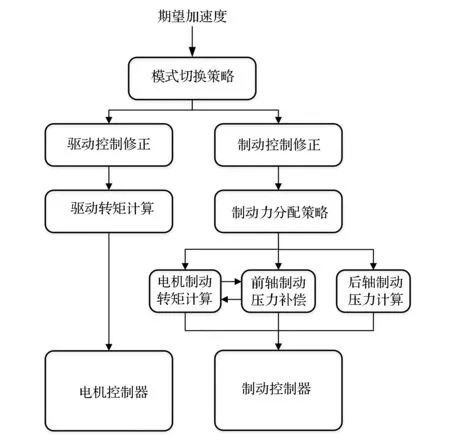
圖4 縱向控制方法流程圖
4 仿真與驗證
為驗證本文中構建的基于迭代學習的電動車縱向動力學控制方法在自適應巡航下的控制效果,首先需要構建自適應巡航的決策算法。根據文獻[12]中的方法建立基于最優二次型的決策層算法。
定義控制指標函數:

式中:e(t)為期望車間距與實際車間距的差值;ades(t)為輸出的期望加速度;qe和ru為誤差權值和加速度權值。考慮實際駕駛特性,取qe=10和ru=3,黎卡提方程求解整理得到:

式中:ades為期望加速度;y為車間距;dsafe為安全車間距;ah為自車加速度。定義外界風速50km/h,前車速度變化如圖5所示。
車速、車間距跟隨如圖6和圖7所示,基于最優線性二次型的ACC決策層算法對前車車速跟隨和車距跟隨效果較好。
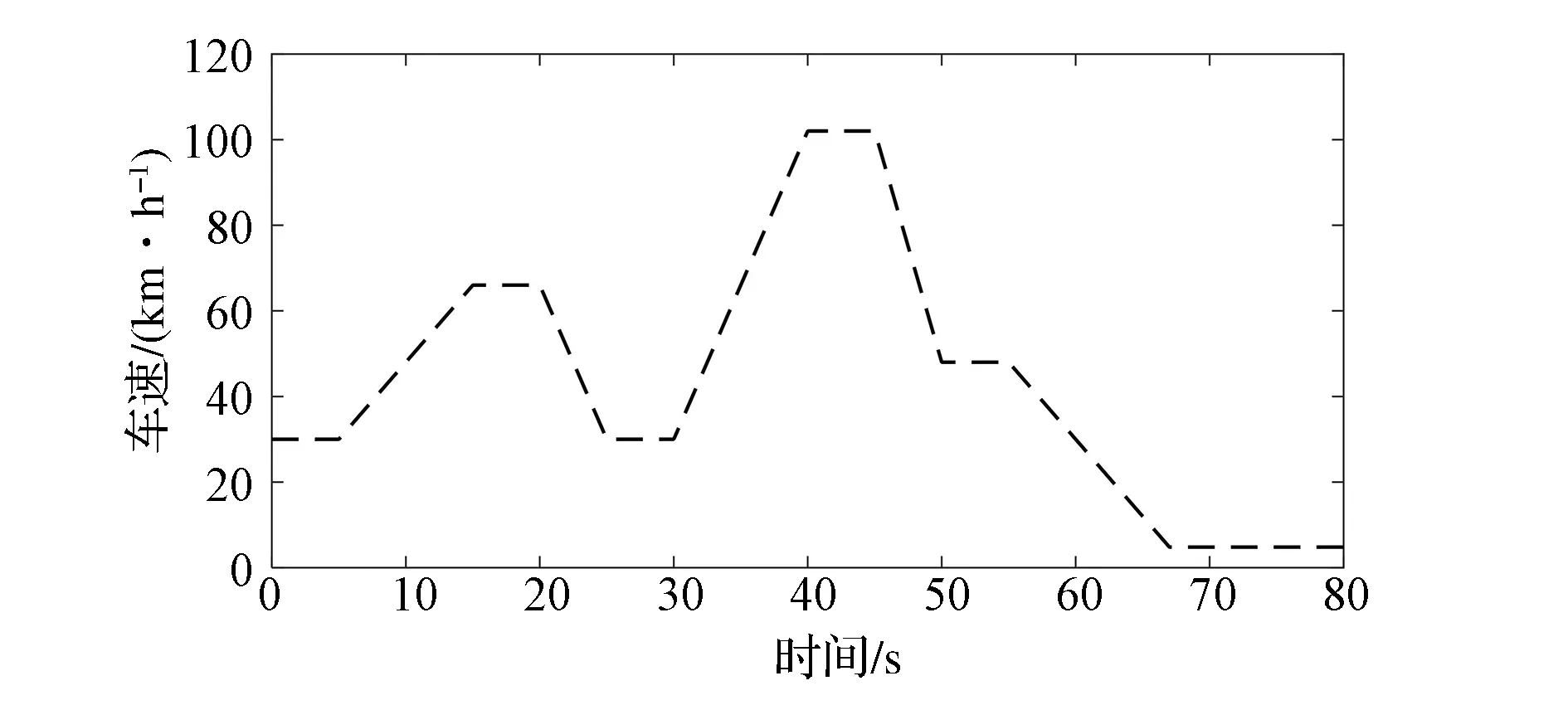
圖5 前車速度時間歷程

圖6 車速跟隨曲線
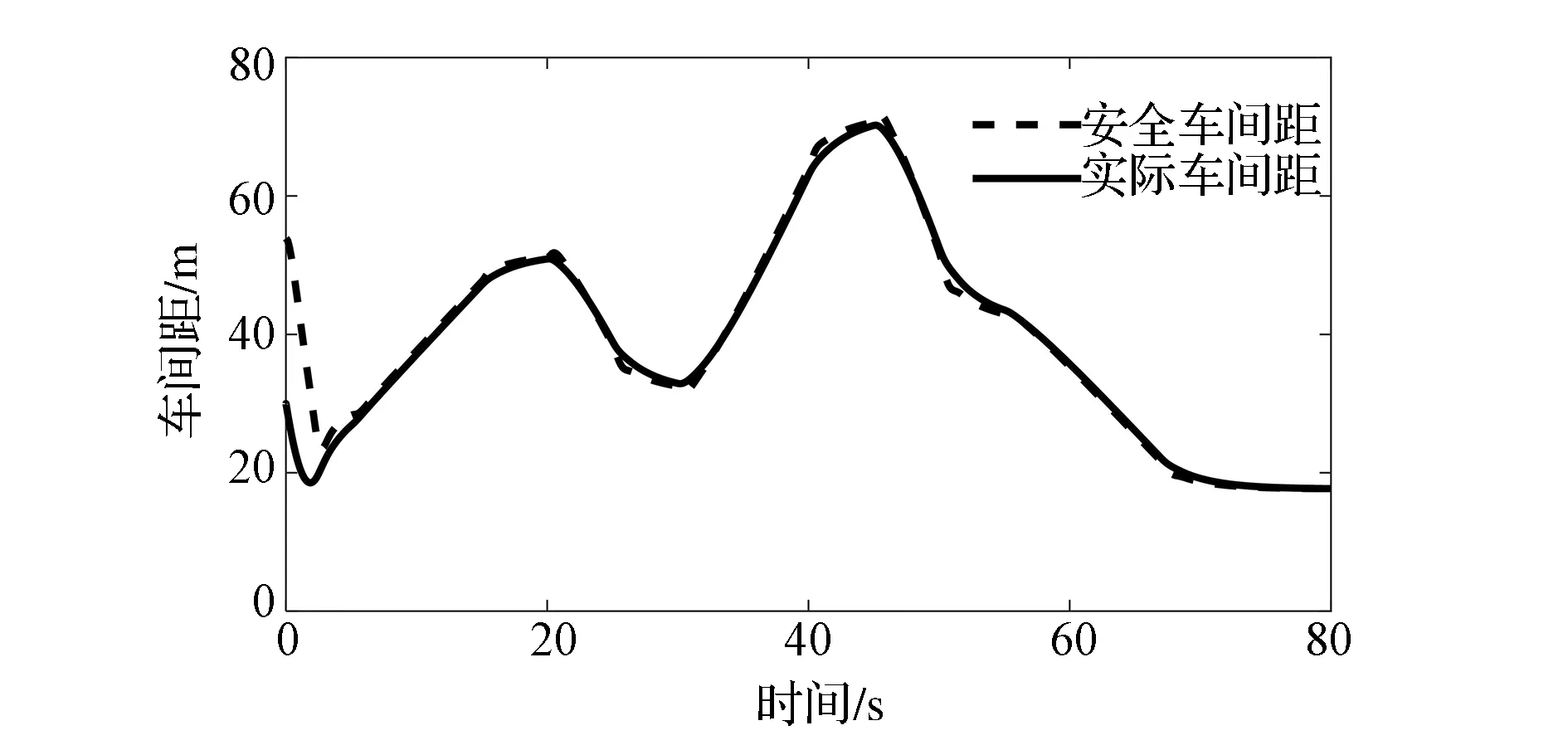
圖7 車間距跟隨曲線
前后軸制動壓力分配如圖8所示,電機轉矩變化如圖9所示。前期制動強度需求較高,因此前軸液壓制動力、后軸液壓制動力、電機制動力均參與制動。后期制動強度需求較少,主要為電機制動或電機和后軸液壓共同參與制動。根據文獻[13]中能量回收率計算方法,經計算仿真工況下的能量回收率為46.59%。
為驗證本文中設計的基于迭代學習的縱向動力學控制方法有效性,選擇傳統的PID控制方法作為對比算法。模式切換策略基準加速度為0,若期望加速度大于0則進入驅動模式,若期望加速度小于0則進入制動模式,并采用式(10)建立的決策算法計算期望加速度。仿真結果如圖10~圖13所示。

圖8 前、后軸輪缸制動壓力

圖9 電機轉矩時間歷程

圖10 車速跟隨曲線
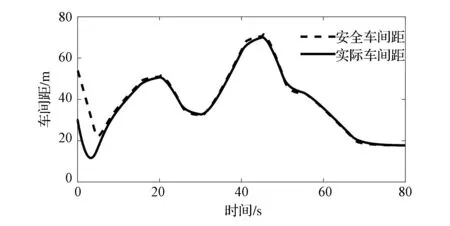
圖11 車間距跟隨曲線
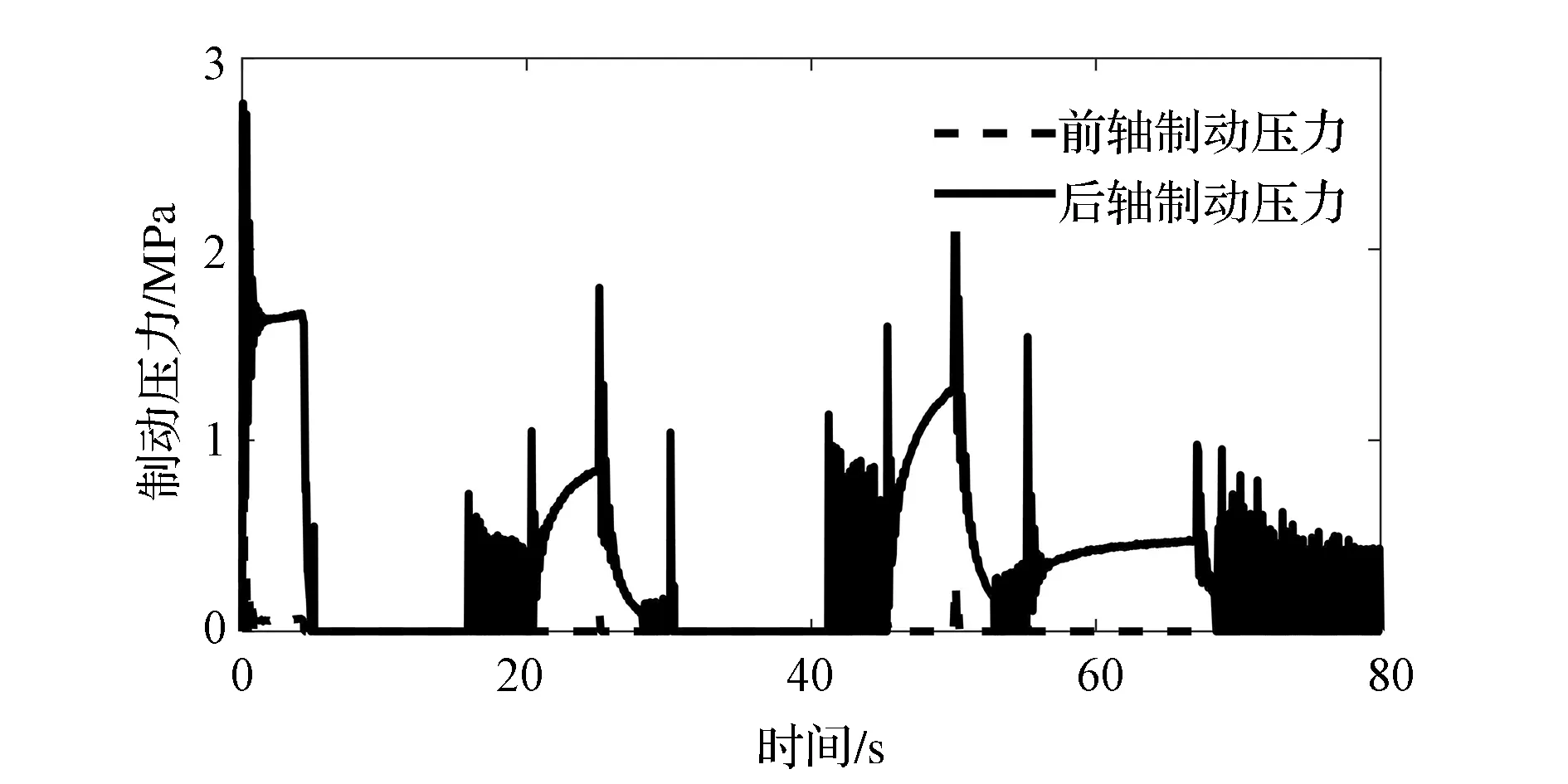
圖12 前、后軸輪缸制動壓力
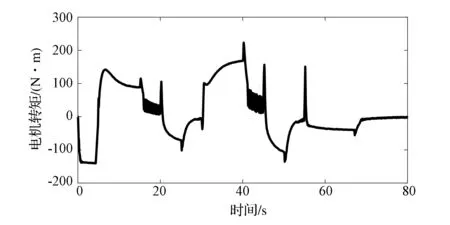
圖13 電機轉矩時間歷程
由于決策算法相同,PID控制方法與迭代學習控制方法在車速跟隨和車間距跟隨效果上相近。而前后軸制動壓力和電機轉矩控制相比于迭代學習控制方法有較大的波動。為進一步比較兩種控制方法的跟隨效果,圖14和圖15列出了PID控制方法和迭代學習方法實際加速度對期望加速度的跟隨曲線。PID方法期望加速度在基準加速度附近控制時,實際加速度出現較大的波動,驅動模式和制動模式頻繁切換。在實車中若模式頻繁切換會加快部件磨損,甚至失效。其原因主要在于風阻的干擾使基準加速度發生變化,而本文的縱向控制算法加入了對于基準加速度的實時擬合預測,并增加了切換閾值,使控制過程更為穩定。
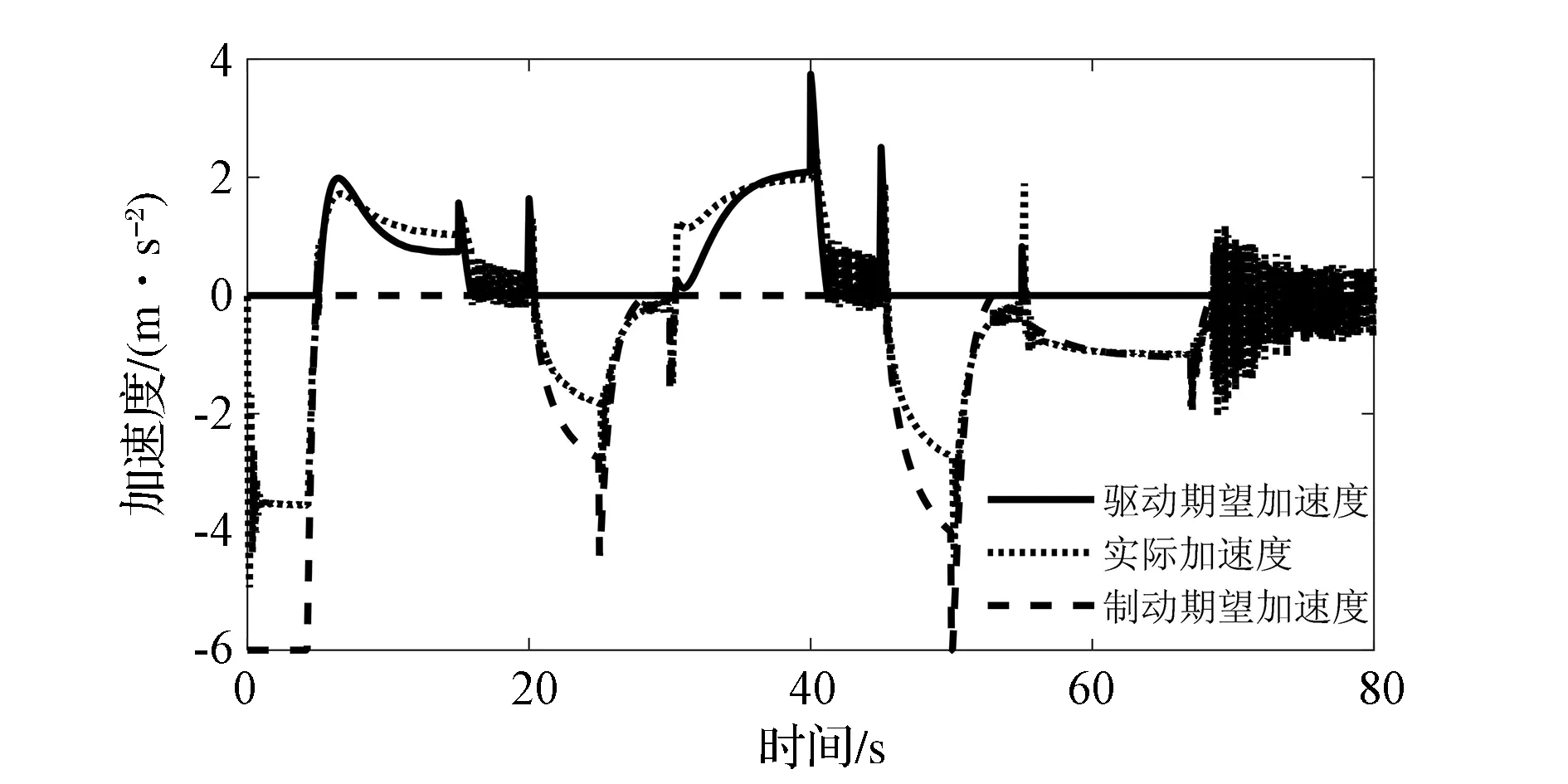
圖14 PID方法加速度跟隨曲線
PID控制方法在期望加速度快速變化時,實際加速度對期望加速度跟隨誤差較大。其主要由于傳統PID算法基于時不變系統設計。迭代學習控制方法由于在每一個控制周期均利用了上一周期的控制經驗,并對這一周期的期望值做出修正,因此其對環境有一定的自適應性,實際加速度對期望加速度的跟隨效果較好。
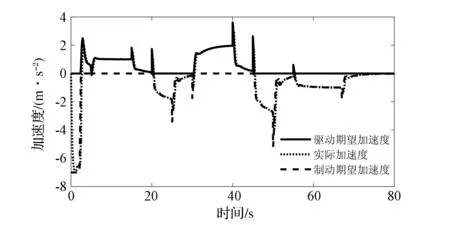
圖15 迭代學習方法加速度跟隨曲線
5 結論
提出一種前軸驅動純電動轎車的自適應巡航縱向控制方法,具體包括設計了在自適應巡航系統下的制動能量回收制動力分配策略;基于加權最小二乘算法的驅動、制動模式切換策略;基于迭代學習的自適應巡航縱向控制方法,并在Matlab/Simulink和CarSim聯合仿真平臺下仿真驗證,并與傳統PID控制方法仿真結果進行對比,得出如下結論。
(1)基于最優線性二次型構建自適應巡航決策層算法,本文中縱向控制方法與傳統PID控制方法均能實現自車對前車車速跟隨和車間距跟隨。
(2)PID控制方法在基準加速度附近工作時,出現模式頻繁切換現象,本文中控制方法工作狀態穩定。原因在于其模式切換策略可以實時擬合預測基準加速度,補償風阻等外界環境變化對模式切換的影響。
(3)PID控制方法期望加速度跟隨實際加速度有較大的誤差,本文中控制方法實際加速度對期望加速度跟隨性較好。其原因主要在于傳統PID控制方法難以適應時變系統的控制。本文中基于迭代學習的縱向控制方法可根據歷史輸出數據做出修正,快速適應環境變化。
[1] 李朋,魏民祥,侯曉利.自適應巡航控制系統的建模與聯合仿真[J].汽車工程,2012,34(7):622-626.
[2] LEE G D,KIM SW.A longitudinal control system for a platoon of vehicles using a fuzzy-sliding mode algorithm[J].Mechatronics,2002,12(1):97-118.
[3] 李以農,冀杰,鄭玲,等.智能車輛自適應巡航控制系統建模與仿真[J].中國機械工程,2010(11):1374-1381.
[4] No ECE R.13:“Uniform Provisions concerning the approval of vehicles of categories M.N and O with regard to braking.”[S].United Nations Economic Commission for Europe,2003.
[5] YANG Y,CHU L,YAO L,et al.Study on the algorithm of active pressurization control of regenerative braking system in pure electric vehicle[C].SAE Paper 2015-01-2708.
[6] 蔡建偉.純電動汽車全解耦式制動能量回收系統[D].長春:吉林大學,2016.
[7] IOANNOU P,XU Z.Throttle and brake control systems for automatic vehicle following[J].Journal of Intelligent Transportation Systems, 1994, 1(4):345-377.
[8] 余志生.汽車理論[M].北京:機械工業出版社,2009.
[9] 裴曉飛,劉昭度,馬國成,等.基于節氣門與制動聯合控制的自適應巡航控制系統[J].汽車工程,2013,35(4):375-380.
[10] RAJAMANI R.Vehicle dynamics and control[M].Springer Verlag Gmbh,2006:27-31.
[11] JANSSENSP,PIPELEERSG,SWEVERSJ.A data-driven constrained norm-optimal iterative learning control framework for LTI systems[J].Control Systems Technology, IEEE Transactions on,2013,21(2):546-551.
[12] 馬國成.車輛自適應巡航跟隨控制技術研究[D].北京:北京理工大學,2014.
[13] 初亮,蔡健偉,富子丞,等.純電動汽車制動能量回收評價與試驗方法研究[J].華中科技大學學報(自然科學版),2014(1):18-22.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
