車輛聯網巡航控制研究?
2018-04-11 11:14:15魏守洋李曉良王文偉
汽車工程 2018年3期
關鍵詞:系統
魏守洋,鄒 淵,李曉良,王文偉
前言
電動化、智能化和網聯化作為未來汽車的發展方向,現已受到國內外汽車廠商和研究機構的廣泛關注。作為車輛智能化的典型應用之一,自適應巡航控制(adaptive cruise control,ACC)系統可根據實時交通環境控制車輛自動加速或減速,使主車與前車保持一定的安全車距行駛,在一定程度上減輕駕駛員的工作強度[1],越來越多的量產車型開始具備此項功能。近幾年,得益于車聯網的發展和相關標準的不斷完善,融合了車間通信(V2V)技術的聯網巡航控制(connected cruise control,CCC)系統開始出現。與傳統的ACC系統相比,CCC系統通過車間通信直接獲取前方車輛的狀態,如位置坐標、航向、速度和加速度等,結合主車傳感器的測量信息,可實現更快的控制響應和更短的跟車距離,將其用于車輛的隊列行駛,可大幅提高道路交通的安全性和通行效率并降低能源消耗[2],在未來智能交通系統中具有很好的應用前景。
目前,國內外一些科研機構針對CCC開展了相關研究,取得了一定的研究成果。文獻[3]中使用頻域響應法對聯網車輛的隊列行駛穩定性進行了分析,對一輛傳統燃油汽車進行改裝和試驗,以驗證控制算法;文獻[4]中在沃爾沃原車ACC系統的基礎上增加了車間通信模塊,并分別設計基于線性控制算法和模型預測控制算法(MPC)的巡航控制策略,但未涉及底層執行機構的控制;文獻[5]中基于模糊PID算法設計車輛協同跟隨控制策略,并通過比例模型小車進行了試驗驗證;文獻[6]中研究了聯網巡航控制中車輛模型的非線性和通信延遲對系統穩定性的影響;文獻[7]中提出了基于滑模控制的前后兩車協同主動避撞算法,但未考慮對隊列中其他車輛的影響;文獻[8]中對比分析了PID和MPC控制算法,得出PID算法的控制效果不遜于MPC且具有快速簡便的優勢;文獻[9]中對比了車輛隊列行駛協同控制中不同的通信拓撲對每輛車的控制穩定性的影響,文獻[6]~文獻[9]中僅停留在計算機仿真階段,所提出的控制算法未進行試驗驗證。綜上所述,目前的研究主要集中于將CCC用于車輛隊列行駛協同控制,比較不同的控制算法、組網方式和通信延遲等對系統穩定性的影響。本文中基于全線控純電動汽車建立了CCC系統試驗平臺并開展實車道路試驗,引入分層控制結構,設計了考慮跟車誤差和隊列穩定性的控制算法,對比分析不同車間時距下的隊列穩定性,最后通過由兩輛車構成的最小隊列行駛試驗驗證控制算法的有效性。
1 CCC實車試驗平臺結構
試驗平臺以北汽新能源EU260型純電動汽車為基礎,車輛的主要參數見表1,平臺結構如圖1所示。在不改變原車結構的基礎上對縱向控制執行機構進行了線控化改裝:將CCC主控制器發出的加速指令轉換為0-5V的模擬量信號接入原車加速踏板的信號輸出端,然后發送至原車的電機控制器(MCU);通過給電子真空助力裝置(EVB)控制單元發送制動指令來控制制動輪缸產生制動壓力。

表1 試驗車輛基本參數

圖1 CCC實車試驗平臺結構
在環境感知部分,使用德爾福76~77GHz的毫米波雷達探測前方目標信息,其長距端和中距端的最大檢測距離分別為100和50m,水平視角為±10°和±45°,最多檢測64個目標。雷達采集到的原始目標信息通過CAN接口卡傳送至雷達控制單元。控制單元使用了一臺裝有64位操作系統的工控機,通過在工控機內運行的雷達目標跟蹤算法[10]來監測前方有效跟蹤目標,并將數據發送給主控制器。
車間通信采用Cohda MK5無線通信模塊,該設備支持IEEE 802.11p/IEEE 1609無線通信協議和SAE J2735專用短程通信(dedicated short range communication,DSRC)標準,工作于5.9GHz頻段,可傳輸的基本安全消息(basic safety message,BSM)包括車輛地理位置、車身尺寸、速度、加速度、航向角和制動狀態等,且集成了衛星定位功能,實測最大通信距離達300m。
車載CCC主控制器采用Mototron實時控制系統,擁有飛思卡爾32位 MPC555微處理器和兩路CAN通信通道,支持在Matlab/Simulink編譯環境下的模型自動生成代碼和下載,方便試驗調試。系統中毫米波雷達和車間通信模塊的更新周期為50ms,Mototron控制周期為10ms,各部分之間通過高速CAN網絡通信。
2 聯網巡航控制系統設計
圖2為帶有聯網巡航控制系統的車輛組成的行駛隊列示意圖。其中的第i輛車作為主車(i>1),第 i-1 輛車為主車前方的車輛(前車)。 dr,i,vr,i為主車和前車的縱向相對車距和相對車速,通過毫米波雷達測得;ai-1為前車加速度,通過無線通信發送給主車。

圖2 車輛聯網巡航行駛示意圖
聯網巡航控制系統采用分層式控制結構,上層控制器為CCC控制層,根據主車車速、主車與前車的車距和相對速度,以及前車加速度來計算主車的期望加速度;下層控制器為執行機構控制層,負責計算加速和制動指令,使得實際加速度準確跟隨期望加速度。控制系統結構如圖3所示。圖中,ades,i為期望加速度;α為加速指令;p為制動指令;ai為主車加速度;vi為主車速度。

圖3 CCC系統結構
2.1 上層聯網巡航控制算法
選擇固定車間時距模型[11]作為主車的跟車距離保持策略,主車與前車的期望車距為

式中:ddes,i為主車期望車距; h 為車間時距; d0,i為停車安全車距。
跟車誤差動力學關系為

式中:ei為車距誤差;vi-1為前車速度。
車輛的底層動力學實現實際加速度ai對期望加速度ades,i的跟蹤,其響應可表征為1階慣性延遲環節[11]。若令期望加速度ades,i(t)作為底層動力學模型的輸入u(t),車輛駛過的距離xi(t)作為輸出,車輛動力學模型的傳遞函數為

式中:s為拉普拉斯算子;kG,i為系統穩態增益;τi為慣性系數;?i為時間延遲。
聯網巡航控制算法一方面應當保持主車與前車的車距誤差和相對速度趨向于零,另一方面使得主車根據前車的加速度快速做出響應,同時還要保證隊列行駛的穩定性。圖4為聯網巡航控制算法示意圖,控制量ui包含誤差反饋控制量uK,i和加速度前饋控制量 uF,i兩部分,即

式中:k1和k2為反饋控制器Ki的調節參數;Di(s)為通信延遲環節,Di(s)=e-θs,θ為延遲時間。

圖4 CCC控制算法框圖
F(s)為前饋補償器,作用是當前車加速度作為可測擾動輸入主車控制系統時,提前對其進行調節以減輕反饋控制器的負擔,使系統更快進入穩態,F(s)根據復合控制系統對擾動的誤差全補償條件來確定[12]。令車距誤差為零,即

若忽略車輛動力學模型和無線通信中的純時間延遲環節,得

上式忽略了延遲環節,當Fi(s)用于實際控制時可以用系數k3取代上式中的微分項系數τi,對k3適當修正可獲得更好的控制效果。
2.2 下層執行機構控制算法
執行機構控制層通過控制驅動電機產生驅動力矩和制動系統產生制動壓力使主車的實際加速度能精確跟蹤上層輸出的期望加速度,控制結構如圖5所示。

圖5 執行機構控制結構示意圖
在實車控制時,需避免同時執行加速和制動操作,參考文獻[1]中的方法,根據車輛帶擋滑行試驗測得的加速度-速度關系建立加速和制動控制切換策略。對實測數據進行濾波處理后,可擬合為一個線性表達式,即

式中:as為基準加速度;加速度和速度單位分別為m/s2和km/h。為避免加速和制動頻繁切換,適當放寬車輛怠速控制區間,在基準加速度上下設置切換邊界,如表2所示。

表2 執行機構切換策略
加速控制根據當前車速和期望加速度來計算加速指令,并將該信號發送給電機控制器來控制驅動電機的轉矩輸出。假設車輛行駛在無風平直道路上,電機的需求轉矩Td通過車輛行駛方程式計算:

式中:r為車輪半徑;i0為傳動系統加速比;m為整備質量;f為滾動阻力系數;CD為風阻系數;A為正投影面積;δ為旋轉質量換算系數。
通過試驗測得不同加速踏板行程下的電機轉矩-轉速關系曲線,如圖6(a)所示。在行駛過程中根據當前的需求轉矩和電機轉速查表插值得到加速指令α。
對于制動控制,通過測量主車在不同車速時給出的不同制動壓力所產生的制動減速度,可構建出制動控制查詢表。試驗在平直無風的正常附著道路上進行,將制動壓力歸一化為制動百分比信號,由0-100%每隔4%測量主車在0-50km/h范圍內不同速度下所產生的加速度,結果如圖6(b)所示。在實車制動控制時,根據當前車速和期望加速度查詢該表即可插值得到制動指令p。

圖6 加速和制動控制查詢表
由于主車在行駛時可能會遇到道路坡度、風速和自身質量變化帶來的干擾,導致實際加速度不能達到期望加速度,故設置了反饋控制環節,算法采用數字增量式PI控制,控制量增量Δua,i( k)為

式中:k為采樣序號;kp為比例增益;ki為積分增益;aerr為加速度誤差, aerr= ades,i-ai。
另外,為避免加速度過大影響乘坐舒適性,對期望加速度ades,i進行了飽和處理:

3 聯網巡航隊列行駛穩定性分析
隊列行駛的穩定性(string stability)是指當多輛車組成隊列行駛時,前車出現的縱向車速波動向隊列后方傳播時不會出現放大現象[3]。現實生活中常常出現當前方某車進行制動后,后面各車的制動減速度越來越大,最終導致后方車輛停車,出現交通擁堵,即制動減速度出現了放大的現象,是一種典型的隊列不穩定行為。定義隊列穩定性傳遞函數[3]為

式中m為隊列中的車輛數目。
隊列穩定性條件可表示為

對于圖4所示的CCC策略,隊列穩定性傳遞函數為

作為對比,如果去掉加速度前饋控制環節,即得到對應的ACC控制策略,其隊列穩定性傳遞函數為

使用頻域響應法分析隊列行駛的穩定性。選取的控制器和模型參數如表3所示。分別畫出不同車間時距對應的CCC系統和ACC系統隊列穩定性傳遞函數的伯德圖,如圖7所示。可以看出,對于CCC系統,當h≥1s時就能滿足隊列穩定性條件;對于ACC系統,當h=3s時才能滿足隊列穩定條件。說明CCC系統可在更短的跟車距離條件下保證隊列穩定性。

表3 控制系統參數

圖7 隊列穩定性傳遞函數伯德圖
在Matlab/Simulink中建立由5輛車組成的隊列行駛仿真模型,分別對CCC系統和ACC系統進行時域仿真,結果如圖8所示。圖中各條曲線按照灰度從深到淺分別表示第1至第5輛車,第1輛車為頭車。頭車按照給定的速度行駛,速度波動角頻率為0.13rad/s,后面各車的車間時距設為1s。可以看出,CCC系統表現出了更快的跟車響應,而且速度波動未呈現放大趨勢,保證了隊列行駛的穩定性。

圖8 隊列行駛仿真曲線
4 實車試驗驗證
4.1 車輛動力學模型驗證
在設計CCC上層控制算法時,車輛動力學模型被簡化為一個式(3)所示的1階慣性延遲環節,其中的參數τi和?i通過階躍響應法[13]進行辨識。在平直無風道路上,分別給出正和負的期望加速度階躍信號,記錄實車加速度響應。辨識出的加速和制動參數如表4所示。圖9為模型和實車的加速度在期望加速度階躍信號下的響應,可以看出模型仿真加速度曲線和實際加速度曲線非常接近,說明簡化模型可用來表征車輛縱向動力學特性。

表4 車輛動力學模型參數
4.2 隊列行駛試驗
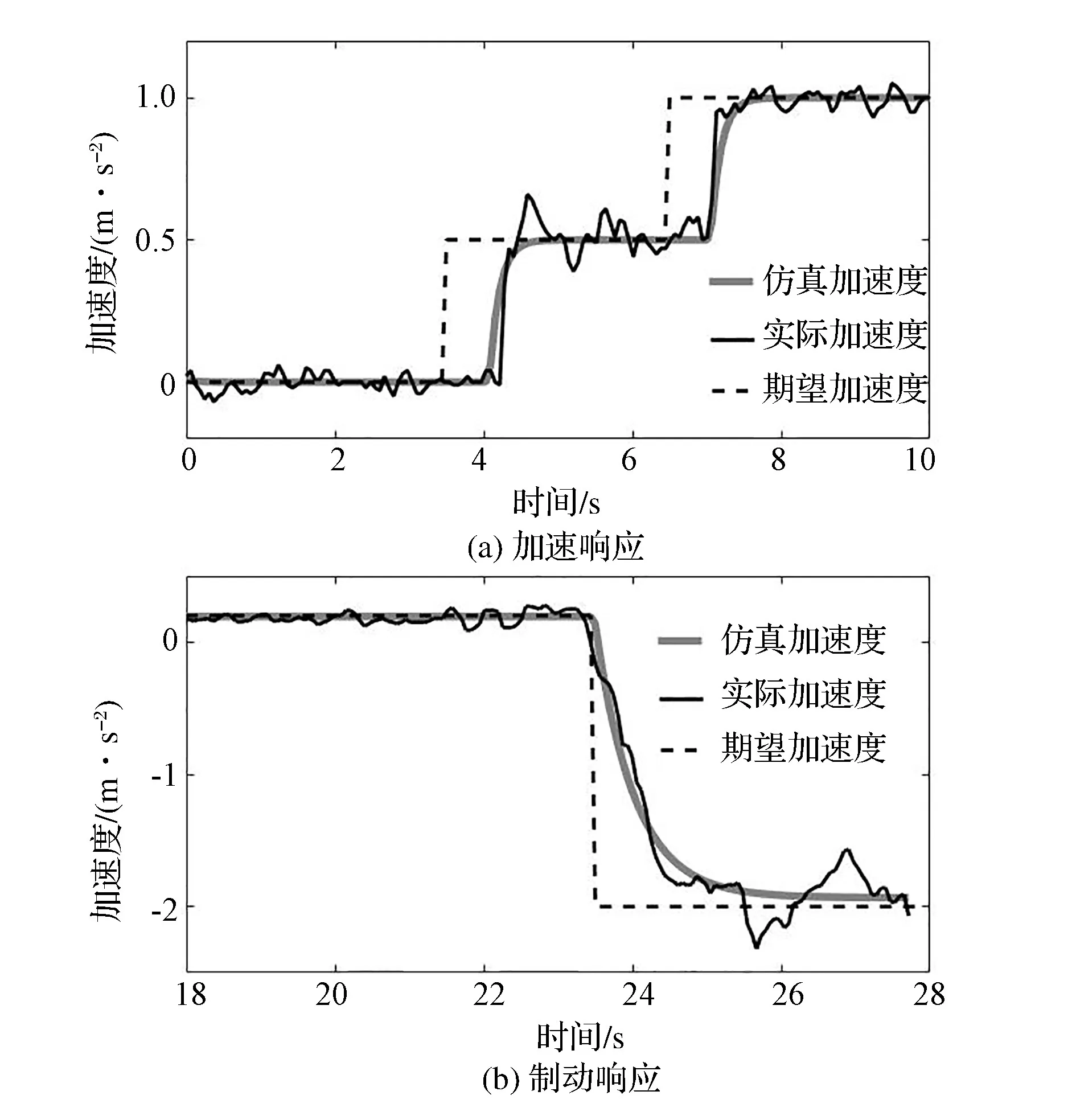
圖9 車輛動力學模型階躍響應

圖10 隊列行駛試驗場景示意圖
在完成控制策略開發和試驗平臺搭建后,進行了兩輛車構成的最小行駛隊列的試驗驗證。試驗在平直無風鋪裝路面上進行,前車將陀螺儀測得的縱向加速度通過無線通信發給主車,主車安裝毫米波雷達測量與前車的相對速度和車距,試驗場景如圖10所示。前車車速首先在15~30km/h之間做正弦波動,隨后進入勻速工況。試驗共進行3組:(1)主車使用CCC系統,h=1s;(2)主車使用CCC系統,h=0.5s;(3)主車使用ACC系統,h=1s。需要說明的是,由于車輛加速和制動的動力學特性不同,因此針對加速和制動選擇了不同的控制器參數:加速時,k1=0.02,k2=0.3;制動時,k1=0.3,k2=0.8;k3均為0.6。實測通信延遲為80ms。停車安全車距設為5m。試驗結果如圖11所示。
從圖中可以看出:(1)使用CCC系統當車間時距為1s時,盡管初始狀態存在較大的車距誤差,但是在控制器的調節下誤差能夠快速減小,后續車距誤差始終保持在3m以下,在前車車速出現波動時,主車速度能快速準確地跟隨前車速度變化,且主車車速的波動范圍沒有出現放大的趨勢,滿足隊列穩定性條件,前車進入勻速工況后,主車同樣能保證準確跟隨;(2)使用CCC系統當車間時距為0.5s時,盡管主車能準確跟隨前車速度波動,但在28,39和50s附近出現了主車車速變化超出了前車的現象,破壞了隊列行駛的穩定性;(3)使用ACC系統當車間時距為1s時,相比CCC系統,當前車速度波動時主車存在較大的跟車誤差,明顯不能保證隊列穩定性。以上對比的結果表明,與傳統ACC系統相比,CCC系統可實現更快速而準確的控制響應,而保證隊列行駛穩定性的車間時距更短。

圖11 隊列行駛試驗結果
5 結論
本文中以線控純電動汽車為基礎,設計了CCC系統分層式控制策略。上層采用加速度前饋加誤差反饋的控制算法;下層設計了加速與制動的查詢表和加速制動的切換規則,以保證實際加速度能夠準確跟隨期望加速度。從頻域和時域兩方面研究了不同車間時距對隊列穩定性的影響。搭建了聯網巡航控制實車試驗平臺,隊列行駛試驗結果表明:控制策略可實現快速準確的控制響應,為在更短的跟車間距下保證隊列行駛的穩定性提供了一種實現可能性。所提出的CCC系統上層控制算法同樣適用于燃油汽車和其他新能源汽車。將CCC用于未來智能交通系統,可提升道路通行效率和安全性。受試驗條件限制,本文中只進行了低速工況下兩輛車的隊列行駛試驗,今后將開展多輛車在全速度工況下的示范運行,研究不同的聯網結構和通信延遲對隊列穩定性的影響。
[1] 裴曉飛,劉昭度,馬國成,等.基于節氣門與制動聯合控制的自適應巡航控制系統[J].汽車工程,2013,35(4):375-380.
[2] SHLADOVER SE,NOWAKOWSKI C,LU X Y,et al.Cooperative adaptive cruise control(CACC)definitions and operating concepts[C].Proceedings of the 94th Annual TRB Meeting.Transportation Research Board,2015.
[3] NAUS G J L, VUGTS R P A, PLOEG J, et al.String-stable CACC design and experimental validation:A frequency-domain approach[J].IEEE Transactions on Vehicular Technology, 2010, 59(9):4268-4279.
[4] KIANFAR R,AUGUSTO B,EBADIGHAJARI A,et al.Design and experimental validation of a cooperative driving system in the grand cooperative driving challenge[J].IEEE Transactions on Intelligent Transportation Systems, 2012, 13(3):994-1007.
[5] 李通,鹿應榮,王龐偉,等.基于模糊PID的車輛協同跟隨控制算法研究[C].2014第九屆中國智能交通年會大會論文集,2014.
[6] OROSZ G.Connected cruise control:modelling, delay effects, and nonlinear behaviour[J].Vehicle System Dynamics, 2016,54(8):1147-1176.
[7] 王龐偉,余貴珍,王云鵬,等.基于滑模控制的車車協同主動避撞算法[J].北京航空航天大學學報,2014(2):268-273.
[8] WANG P, SUN Z, TAN J, et al.Development and evaluation of cooperative adaptive cruise controllers[C].2015 IEEE International Conference on Mechatronics and Automation(ICMA).IEEE,2015:1607-1612.
[9] ZHENG Y, LI S E, WANG J, et al.Stability and scalability of homogeneous vehicular platoon:Study on the influence of information flow topologies[J].IEEE Transactions on Intelligent Transportation Systems, 2016, 17(1):14-26.
[10] 馬國成,劉昭度,裴曉飛,等.車載雷達多車道目標識別及補償方法[J].北京理工大學學報,2013,11:007.
[11] ZHOU J,PENG H.Range policy of adaptive cruise control vehicles for improved flow stability and string stability[J].IEEE Transactions on Intelligent Transportation Systems, 2005, 6(2):229-237.
[12] 胡壽松.自動控制原理[M].北京:科學出版社,2013.
[13] 方崇智.過程辨識[M].北京:清華大學出版社,1988.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
