分布式電動車輛橫向穩定性模糊滑模控制
2018-04-11 06:58:11郭景華
廈門大學學報(自然科學版) 2018年2期
王 進,郭景華
(廈門大學航空航天學院,福建 廈門 361102)
在環境污染和能源危機雙重壓力下,發展電動汽車技術已成為解決這兩個問題的有效方法之一.分布式電動汽車作為全新形式的電動車輛具有獨特動力系統和傳動系統,當其在高速過彎、變道以及在地面附著條件惡劣的情況下轉向行駛時,會發生側滑、急轉和側翻等失穩的危險工況,為解決橫向穩定性問題,分布式電動汽車的橫向穩定性控制技術在國內外各大高校和研究機構得到廣泛的關注和研究[1-2].
近年來,為改善分布式電動汽車在高速行駛情況下的操縱穩定性,相關學者和研究人員提出了很多提升車輛橫向穩定性的方法[3-4].林程等[5]提出基于分布式橫向穩定性分層控制策略,通過調節四輪制動缸壓力和電機力矩間接實現橫擺力矩控制.Tchamna 等[6]對車輛運動不做簡化假設并且考慮到縱向動力學提出一種橫擺角速度和質心側偏角的控制方法,并通過差速制動控制器實現對車輛橫向穩定性的控制.Li 等[7]綜合考慮分布式電動汽車質心處縱/橫向力誤差、橫擺力矩、執行器控制力和輪胎利用率等性能指標,提出了一種多目標優化函數并且設計了一種加權因子調節方案來調節目標函數中各性能的相對權重,以此達到對分布式電動汽車的橫向穩定性控制.劉樹偉等[8]在忽略汽車非線性的影響下,提出跟蹤理想橫擺角速度和抑制汽車質心側偏角的控制方法,采用線性二次型調節器(LQR)對汽車橫擺力矩進行決策,在建立的七自由度車輛動力學模型上進行仿真,證明了所提出方法對橫向穩定性有所提升.李少坤[9]考慮了車輛的非線性影響,基于滑模控制提出對理想質心側偏角和橫擺角速度進行跟蹤的控制策略,充分利用滑模控制對非線性系統具有魯棒性和響應速度快的優勢,使得在低附著路面上高速運行的車輛能夠穩定轉向,進一步提升了車輛的橫向穩定性.在滑模控制中引入邊界層削弱抖振,但過窄的邊界層對抖振削弱不明顯,過寬的邊界層出現較大的穩態誤差,由于外界不確定因素的存在,若只使用固定的邊界層將無法適應系統參數變化,滑模面附近依然存在高頻切換而產生高頻的抖振現象,這種高頻抖振對車輛穩定性及相關機械機構磨損將產生消極的影響[10].張利鵬等[11]以車輛的橫擺角速度及質心側偏角與理想值之間的偏差作為模糊輸入,橫擺力矩作為控制輸出參量,提出模糊控制橫向穩定性控制策略;模糊控制不需借助精確數學模型,對外界變化、內部干擾及參數變化有很強的魯棒性,其文中所提出策略在整車高速穩定性控制方面取得了良好的控制效果,但是模糊控制需要依賴研究人員的豐富經驗及專家知識來設定模糊規則,且模糊控制根據系統特性進行自適應調整較為困難,會出現穩態誤差.
綜上所述,針對分布式電動汽車高度非線性和參數不確定的特性,本研究提出一種基于模糊滑模的分布式電動汽車橫向穩定性控制策略,通過模糊理論實時在線調節變結構增益參數,并引入飽和函數削弱變結構控制的抖振現象,進而實現分布式電動汽車附加橫擺力矩的控制,并基于MATLAB/Simulink與Carsim聯合仿真在多工況行駛條件下對所提出的控制策略進行試驗分析.
1 車輛理想模型的建立
1.1 車軸二自由度模型
車輛橫擺運動及側向運動的期望狀態可由車輛二自由度模型表征,此處忽略車輛的垂向運動以及俯仰運動,只考慮車輛在繞車輛坐標系Z軸(Z軸垂直于XY軸平面)方向的橫擺運動和沿Y軸方向的側向運動,建立車輛二自由度模型[12],并假設車身是剛性的,縱向速度視為不變,附著條件良好,忽略空氣阻力和摩擦阻力,輪胎處于線性范圍內,車輛模型如圖1所示.
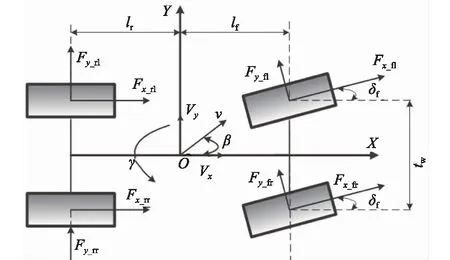
圖1 車輛二自由度模型Fig.1 2 degree of freedom model of vehicle
應用牛頓第二定律來描述車輛二自由度模型:
Fy_rl+Fy_rr+(Fx_fl+Fx_fr)sinδf+(Fy_fl+
(1)
lf(Fx_fl+Fx_fr)sinδf+lf(Fy_fl+
Fy_fr)cosδf-lr(Fy_rl+Fy_rr)+
0.5tw(Fx_fr-Fx_fl)cosδf+0.5tw(Fx_rr-
(2)
其中,Fx_fl、Fx_fr、Fx_rl和Fx_rr分別表示各輪的縱向力,Fy_fl、Fy_fr、Fy_rl和Fy_rr分別表示各輪的側向力,β為質心側偏角,γ是橫擺角速度,m表示整車質量,lf與lr分別為車身前軸距和后軸距,tw為車輛輪距,δf為前輪轉角,Vx為縱向車速,Vy為橫向車速,Iz為車輛繞垂直軸的轉動慣量.
車輛穩態過彎時,由于假設輪胎處于線性區,輪胎的側偏角與其所受側向力成正比關系,即:
(3)
輪胎側偏角由式(4)可得:
(4)
其中Cf,Cr分別表示前后輪胎側偏剛度.轉彎時前輪轉角較小,有sin(δf)≈0,cos(δf)≈1,令直接橫擺力矩
(5)
則綜合式(1)~(5)用狀態空間方程式表達如下
(6)
其中:
x=[βγ]T,
E=[2Cf(mVx)-12CflfIz-1]T,
u=Mz.
1.2 理想質心側偏角與橫擺角速度
車輛二自由度模型可作為穩定系統期望計算模型,包含車輛質量、前后側偏剛度、輪距、軸距等反映汽車側向運動最重要的幾個量.當車輛以不變的縱向速度穩態過彎時,理想的橫擺角速度和理想質心側偏角[9,13]為:
(7)
(8)
由式(7)和(8)可知,當車輛前輪轉角、縱向車速和車輛的結構參數確定時,車輛穩態過彎時的橫擺角速度及質心側偏角隨之確定.但這些是基于輪胎和地面附著條件良好的情況下的假設,而在實際情況下車輛會受到輪胎和地面附著約束限制.路面的摩擦系數不能提供太高的橫擺角速度下的側向力,因此橫擺角速度必須控制在輪胎與路面的摩擦系數所確定的上限范圍內,并且大的質心側偏角會使得輪胎失去線性特性而接近附著極限,所以對側偏角的限制也很重要.
車輛在轉彎時,質心的側向加速度
(9)
其中ax為車輛的縱向加速度.側向加速度受到地面與輪胎之間的摩擦系數μ限制:
ay≤μg,
(10)
其中g表示重力加速度.
由于Vx不變,因此ax較小,另外車輛運動中,質心側偏角一般都較小,故式(9)中后兩項可忽略,綜合分析取橫擺角速度的上限值為
γmax=0.85μg/Vx.
(11)
因此控制輸出的理想橫擺角速度可設置為
(12)
車輛的質心側偏角最大值一般由經驗選為
βmax=tan-1(0.02 μg).
(13)
與控制輸出的理想橫擺角速度類似,由式(8)和(13)可知控制輸出的理想質心側偏角為
(14)
2 橫向穩定性模糊滑模控制器的設計
分布式電動汽車在高速轉彎時車輛系統存在非線性、時變性和不確定性,滑模變結構控制[14]作為一種典型的非線性控制方法適用于解決非線性系統的控制問題[15].與其他控制方法相比,滑橫控制具有不連續性,即系統隨時間變化而具有開關特性.該控制通過迫使系統在一定特性下沿規定的狀態軌跡作小幅度、高頻率的上下運動,加上外界擾動的影響,系統會產生抖振,缺乏橫向穩定性.因此在本文中采用模糊邏輯算法調整滑模控制的增益參數,通過模糊控制輸出的切換函數系數K值,動態優化滑模控制器,來達到抑制抖振增強車輛穩定性的目的.
2.1 滑模控制器的設計
橫向穩定控制器控制實現的關鍵是穩定跟隨理想的車輛橫擺角速度及理想質心側偏角.構建滑模控制器的滑模函數:
s=ξ(γ-γdes)+(1-ξ)(β-βdes),
(15)
(16)
其中,下標des表示理想值,ξ為權值.

(17)
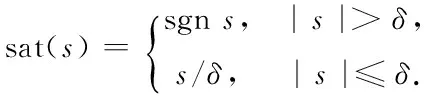
當系統不穩定時,需要通過滑模切換魯棒控制項控制輸出的附加橫擺力矩us,進而將系統拉到滑模面上.本文中通過模糊輸出不斷調整切換魯棒控制項的系數K值,來抑制系統抖振現象,采用飽和函數sat(s)代替控制律中的符號函數sgns,進一步削弱抖振,設δ是“邊界層”厚度,即
us=-Ksat(s),
(18)
(19)
可得到控制律為
Mz=ueq+us,
(20)
將式(20)帶入式(16)可得

(21)
進一步有

(22)
由式(22)可知系統滿足穩定性要求.
2.2 模糊優化滑模控制器

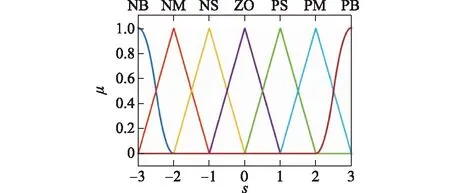
圖2 滑模面s的隸屬度函數Fig.2 Membership functions of sliding mode surface s
本文中提供49條模糊規則,模糊規則設置原則為:當滑模函數s及其導數較大時,增大增益系數K,即當前滑模函數離滑模面s=0較遠時,用較大的增益系數K將其拉回滑模面;當滑模函數s及其導數較小時,減小增益系數K.具體規則如表1所示.
在本文中使用Mamdani推理法解模糊,模糊推理后產生的控制量通過反模糊化成精確的值
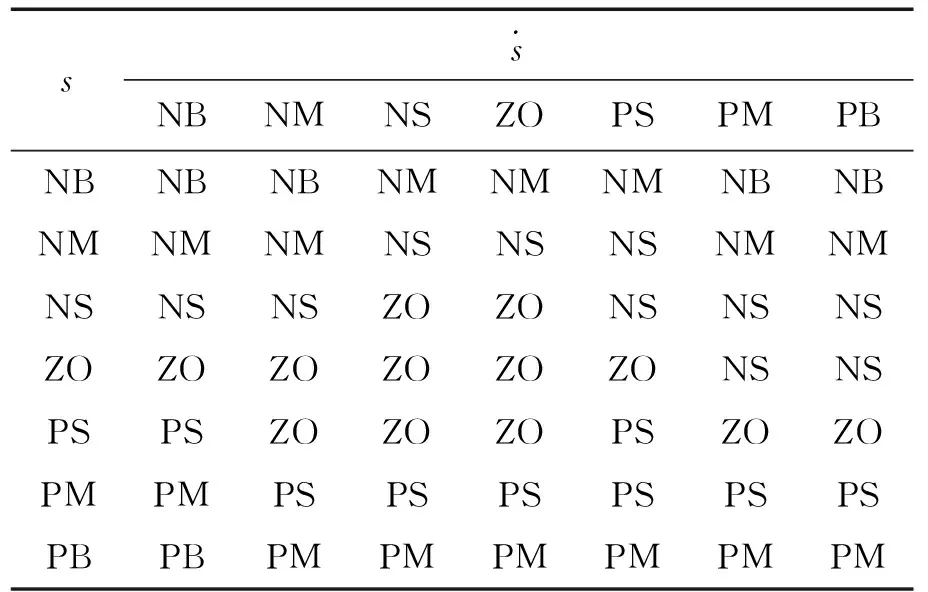
表1 模糊控制規則
(23)
其中,Kb表示解模糊后的精確值,Ki表示模糊控制的論域中的值,μki是與其對應的隸屬度值.
表2 車輛參數
Tab.2 Vehicle parameters

名稱整車質量m/kg轉動慣量Iz/(kg·m2)前軸距lf/m后軸距lr/m前輪側偏剛度Cf/(N·rad-1)后輪側偏剛度Cr/(N·rad-1)輪距tw/m數值12301343.101.041.5680000800001.48
為了驗證模糊滑模控制輸出的附加橫擺力矩的有效性,需將橫擺力矩分配到各個車輪,文中采用平均分配的方法,即4個車輪的縱向力對質心處產生力矩相等.故Fx_fl,Fx_fr大小相等,方向相反;Fx_rl,Fx_rr大小相等,方向相反.又由于分布式電動車輛滿足車輛的動力要求:
Fx_fl+Fx_fr+Fx_rl+Fx_rr=max,
(24)
將控制律式(20)分別帶入式(5)和(24)便可求出各輪的縱向力,進而求得分配到各輪的轉矩
Teq=FxiR.
(25)
其中,Fxi為4個輪胎的地面縱向力,R為輪胎滾動半徑.
3 仿真分析
為驗證所設計的橫向穩定性模糊滑模控制器的準確性,利用MATLAB/Simulink和Carsim聯合仿真,在Simulink中建立控制策略模塊,改變Carsim動力系統設置[16],將傳統汽車模型變為分布式電動車模型并設置試驗工況.Carsim的輸入為4個車輪的轉矩,輸出為轉向輪轉角、縱向車速、質心側偏角、橫擺角速度及4個車輪的縱向力,車輛參數如表2所示.
根據《中華人民共和國道路交通安全法實施條例》第七十八條:即高速公路應當標明車道的行駛速度,最高車速不得超過120 km/h,最低不得低于60 km/h.本文中仿真工況設Vx=100 km/h,ax=0.分別在高附著路面(μ=0.85)和低附著路面(μ=0.40)進行雙移線試驗,試驗的軌跡線如圖3所示.
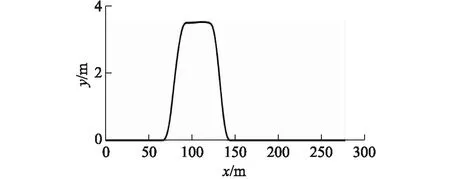
圖3 雙移線試驗工況軌跡線Fig.3 Trajectory of double lane-change test
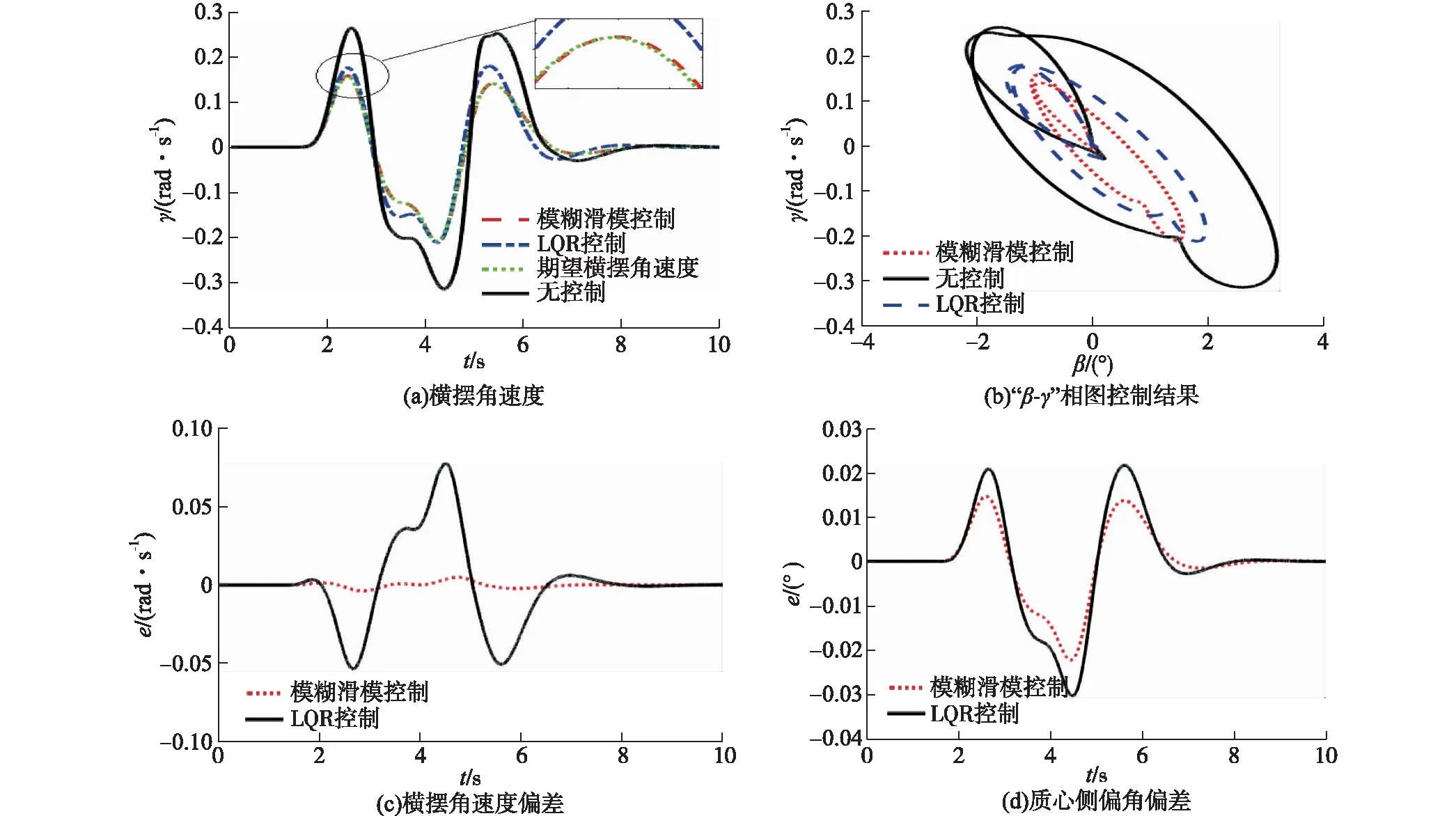
圖4 高附著路面不同控制方法的仿真比較Fig.4 Compare of simulation with different control method in high adhesion road
將本文中的模糊滑模控制方法與文獻[8]的LQR控制方法進行對比仿真試驗,在高附著路面進行雙移線試驗的仿真結果如圖4所示.可以看出,兩種控制方法在高附著路面(μ=0.85)都能夠對車輛穩定性進行控制,但模糊滑模控制方法在橫擺角速度方面控制更顯優勢.由圖4(a)可看出,與無控制對比,LQR控制和模糊滑模控制由于施加了與橫擺角速度方向相反的橫擺力矩,抑制了橫擺角速度過大的問題;與LQR控制相比,模糊滑模控制具有反應速度快,跟蹤期望橫擺角精度高的優點.在圖4(b)中,模糊滑模控制的“β-γ”相圖在各象限伸展程度進一步縮減于零附近,穩定性更高.圖4(c)和(d)反映了橫擺角速度和質心側偏角與各自期望值之間的偏差,可以看出模糊滑模控制橫擺角速度偏差保持在-0.003 8~0.005 0 rad/s內,質心側偏角偏差保持在-0.022°~0.014°.
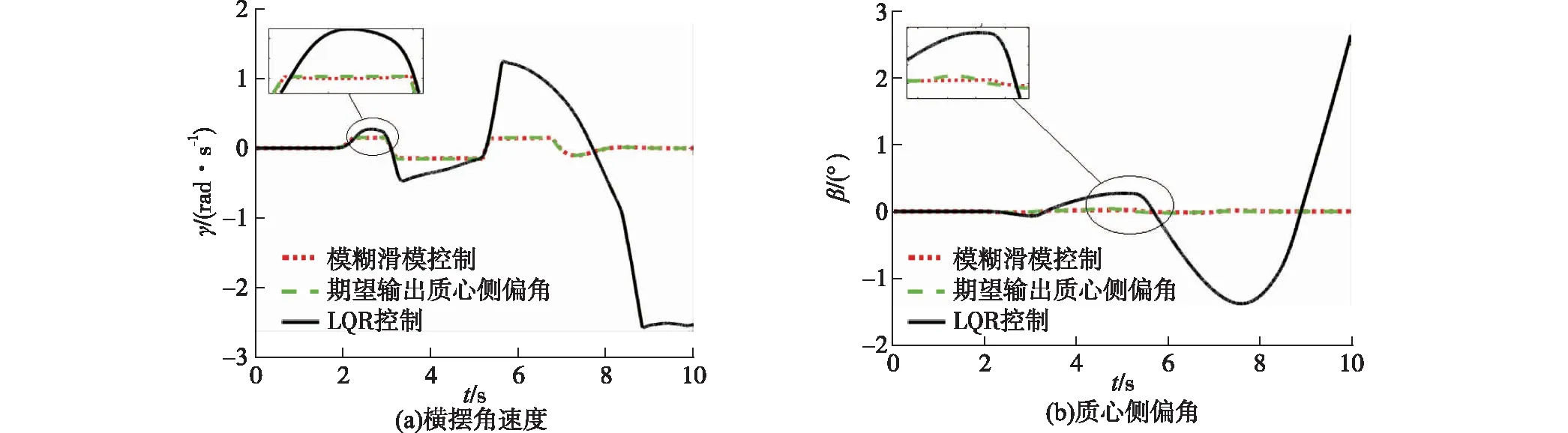
圖5 低附著路面不同控制方法的仿真比較Fig.5 Compare of simulation with different control method in low adhesion road
為進一步驗證滑模控制方法的科學性,在低附著路面(μ=0.4)進行試驗,結果如圖5所示.由圖5可以看出在低附著路面,LQR控制車輛在過第一個彎道時沒有立即失穩;由于車輛質心側偏角沒有抑制住,在過第二個彎道時車輛失去穩定性.而模糊滑模控制的車輛始終處于穩定狀態下,并且很好地跟隨期望的橫擺角速度和質心側偏角.
4 結 論
本研究針對分布式電動汽車在高速轉彎及變道時存在非線性和時變性的特點,以橫擺角速度及質心側偏角為控制目標,提出模糊滑模橫向穩定性控制方法,基于MATLAB/Simulink與Carsim環境下建立仿真模型,選取不同試驗工況進行仿真驗證,仿真結果表明模糊滑模控制方法能夠有效地控制車輛姿態并提高其橫向穩定性.
參考文獻:
[1]ALIPOUR H,SABAHIM,SHARIFIAN M B B.Lateral stabilization of a four wheel independent drive electric vehicle on slippery roads[J].Mechatronics,2015,30(2):275-285.
[2]XIONG L,TENG G W,YU Z P,et al.Novel stability control strategy for distributed drive electric vehicle based on driver operation intention[J].International Journal of Automotive Technology,2016,17(4):651-663.
[3]EMIRLER M T,KAHRAMAN K,SENTURK M,et al.Lateral stability control of fully electric vehicles[J].International Journal of Automotive Technology,2015,16(2):317-328.
[4]余卓平,馮源,熊璐.分布式驅動電動汽車動力學控制發展現狀綜述[J].機械工程學報,2013(8):105-114.
[5]林程,徐志峰,周逢軍,等.分布式驅動電動汽車穩定性分層控制策略研究[J].北京理工大學學報(自然科學版),2015(5):490-493.
[6]TCHAMNA R,YOUN I.Yaw rate and side-slip control considering vehicle longitudinal dynamics[J].International Journal of Automotive Technology,2013,14(1):53-60.
[7]LI B,GOODARZI A,KHAJEPOUR A,et al.An optimal torque distribution control strategy for four-independent wheel drive electric vehicles[J].Vehicle System Dynamics,2015,53(8):1172-1189.
[8]劉樹偉,李剛,鄭利民.基于LQR的汽車橫擺力矩控制研究[J].汽車實用技術,2013(12):56-60.
[9]李少坤.基于轉矩分配的分布式驅動電動汽車穩定性控制研究[D].長春:吉林大學,2016:34-39.
[10]GUO J H,LI K Q,LUO Y G.Coordinated control of autonomous 4WD electric vehicles for platooning and tra-jectory tracking using a hierarchical architecture[J].Journal of Dynamic System Measurement and Control-Transactions of the ASME,2015,137(1):1-18.
[11]張利鵬,李亮,祁炳楠,等.雙電機分布式驅動汽車高速穩定性機電耦合控制[J].機械工程學報,2015,51(16):29-40.
[12]鄒廣才,羅禹貢,李克強.基于全輪縱向力優化分配的4WD車輛直接橫擺力矩控制[J].農業機械學報,2009,40(5):1-6.
[13]RAJAMANI R.Vehicle dynamics and control[M].New Yourk:Springer,2006:146-148.
[14]劉金琨.滑模變結構控制MATLAB仿真:基本理論與設計方法[M].3版.北京:清華大學出版社,2015:278-285.
[15]GUO J H,LI L H,LI K Q,et al.An adaptive fuzzy-sliding lateral control strategy of automated vehicles based on vision navigation[J].Vehicle System Dynamics,2013,51(10):1502-1517.
[16]XIONG L,CHEN C,FENG Y.Modeling of distributed drive electric vehicle based on co-simulation of Carsim/Simulink[J].Journal of System Simulation,2014,26(5):1143-1151.