正六面體工裝誤差對(duì)光纖慣組加速度計(jì)零偏標(biāo)定精度影響分析
2018-04-12 01:42:29胡夢(mèng)純何子輝
導(dǎo)航定位與授時(shí) 2018年2期
關(guān)鍵詞:方法
姚 勤,胡夢(mèng)純,何子輝
(1.海軍駐上海地區(qū)航天系統(tǒng)軍事代表室,上海201109; 2. 上海航天控制技術(shù)研究所,上海201109; 3.上海慣性工程技術(shù)研究中心,上海201109)
0 引言
陀螺和加速度計(jì)是慣性測(cè)量組合的核心元件。慣性測(cè)量組合性能的好壞直接影響導(dǎo)航精度。要提高慣組的使用精度,一方面要提高陀螺和加速度計(jì)的自身精度,另一方面還需要提高慣組的標(biāo)定精度。提高標(biāo)定精度需要分析各誤差源對(duì)標(biāo)定參數(shù)產(chǎn)生的影響,對(duì)基于大理石平板正六面體工裝的標(biāo)定進(jìn)行分析,六面體工裝的精度會(huì)對(duì)標(biāo)定結(jié)果產(chǎn)生影響。本文通過(guò)評(píng)估工裝精度對(duì)標(biāo)定結(jié)果影響的量化關(guān)系,提出一種減小工裝誤差影響的光纖慣組標(biāo)定解算方法。文獻(xiàn)[1]、文獻(xiàn)[2]針對(duì)轉(zhuǎn)臺(tái)誤差對(duì)標(biāo)定結(jié)果的影響進(jìn)行分析[1-2],文獻(xiàn)[3]研究了基于離心機(jī)的IMU標(biāo)定及誤差分析方法[3],而本文使用的標(biāo)定方法并未使用轉(zhuǎn)臺(tái)和離心機(jī),而是采用大理石平板與正六面體工裝進(jìn)行標(biāo)定,針對(duì)正六面體工裝誤差的文獻(xiàn)涉及較少,有必要分析該方法中正六面體工裝誤差導(dǎo)致的標(biāo)定誤差。
1 光纖慣組輸入輸出數(shù)學(xué)模型
標(biāo)定模型對(duì)于標(biāo)定方法的選擇、IMU性能評(píng)估以及系統(tǒng)的誤差分配具有重要意義[4],下面討論光纖慣組的標(biāo)定數(shù)學(xué)模型。
光纖慣組中的陀螺和加速度計(jì)分別為光纖陀螺和石英撓性加速度計(jì),工程上通常使用一階線性方程描述光纖陀螺和石英撓性加速度計(jì)的誤差模型。分別對(duì)陀螺儀和加速度計(jì)建立輸入輸出數(shù)學(xué)模型[5-6]。
光纖陀螺標(biāo)度因數(shù)非線性高,正負(fù)不對(duì)稱性好,零偏穩(wěn)定性好,因此可將陀螺單表的輸入輸出模型近似描述為一階形式。陀螺組合輸入輸出模型用一階線性方程描述為:
(1)
式中:Ngx、Ngy、Ngz為各軸陀螺單位時(shí)間輸出的脈沖數(shù),單位bit/s;kgx、kgy、kgz為各軸陀螺的標(biāo)度因數(shù),單位bit/(°);Egqp(p、q=x,y,z)為慣組各測(cè)量軸相對(duì)各軸陀螺敏感軸由于安裝誤差導(dǎo)致的交耦系數(shù),簡(jiǎn)稱安裝誤差;Egqp為慣組p軸相對(duì)q軸陀螺的耦合;Dgx、Dgy、Dgz為各軸陀螺的零偏,單位(°)/s;ωx、ωy、ωz為外施角速率在慣組x、y、z軸上的分量,單位(°)/s。
加速度計(jì)二次項(xiàng)系數(shù)忽略不計(jì),加速度計(jì)組合輸入輸出模型用一階線性方程可表示為:
(2)
式中:Nax、Nay、Naz分別為各軸加速度計(jì)單位時(shí)間輸出的脈沖數(shù),單位bit/gs;kax、kay、kaz分別為各軸加速度計(jì)的標(biāo)度因數(shù),單位bit/gs;Eaqp(p、q=x,y,z)為慣組各測(cè)量軸相對(duì)各軸加速度計(jì)敏感軸由于安裝誤差導(dǎo)致的交耦系數(shù),簡(jiǎn)稱安裝誤差;Eaqp為慣組p軸上的輸入對(duì)q軸加速度計(jì)的耦合;Dax、Day、Daz為各軸加速度計(jì)的零偏,單位g;fx、fy、fz為外施加速度在慣組x、y、z軸上的分量,單位g。
2 基于大理石平板正六面體工裝的標(biāo)定與解算
慣組的標(biāo)定方法有利用轉(zhuǎn)臺(tái)的方法[7-8],利用六面體工裝的方法[9],使用攝影技術(shù)的方法[10],基于多位置旋轉(zhuǎn)的現(xiàn)場(chǎng)標(biāo)定法[11]等,用標(biāo)定方法多為速率法與位置法,位置法又分為6位置法[12-13]、12位置法[5-6]、20位置法[14]等。
基于大理石平板正六面體工裝的標(biāo)定方法采用了速率法與位置法,速率法采用在高精度大理石平板上手動(dòng)正反轉(zhuǎn)3圈的方式進(jìn)行標(biāo)定,位置法為12位置法。速率法可標(biāo)定出陀螺標(biāo)度因數(shù)、安裝誤差[15];位置法可標(biāo)定出陀螺零偏、加表標(biāo)度因數(shù)、安裝誤差、零偏。本文主要對(duì)正六面體工裝誤差對(duì)加速度計(jì)標(biāo)定零偏誤差的影響進(jìn)行分析,因此僅分析位置法。
位置法編排為12位置,初始位置為天東北,按照X軸朝天、X軸朝地、Y軸朝天、Y軸朝地、Z軸朝天、Z軸朝地的順序?qū)?2位置進(jìn)行排列,得到標(biāo)定順序,如表1所示。

表1 12位置標(biāo)定順序
將12位置加速度計(jì)和陀螺儀輸入代入模型中,利用最小二乘法可以求出:
(3)
(4)
(5)

歸一化可得各軸加速度計(jì)標(biāo)度因數(shù)為
(6)
式中:q=x,y,z。
各軸加速度計(jì)安裝誤差為
Eaqp=Kaqp/kgq
(7)
式中:j=1~12;p=x,y,z;q=x,y,z。
根據(jù)加速度計(jì)各位置各軸輸出可得
可求得各軸加速度計(jì)零偏為
(8)
式中:j=1~12,q=x,y,z。
還有一種零偏的計(jì)算方法為12位置二向法,求各軸零偏時(shí),只考慮敏感軸朝天朝地的位置進(jìn)行解算。
(9)
(10)
(11)
3 標(biāo)定誤差分析
慣組測(cè)試標(biāo)定用工裝為六面體,慣組標(biāo)定時(shí)需要安裝在六面體工裝內(nèi),再在大理石平板上進(jìn)行標(biāo)定。六面體工裝外表面由6個(gè)基準(zhǔn)面組成。六面體內(nèi)由1個(gè)或多個(gè)安裝基準(zhǔn)面組成,這些安裝基準(zhǔn)面能夠保證每次慣組安裝在六面體工裝內(nèi)的一致性,本文不對(duì)六面體內(nèi)的基準(zhǔn)面誤差以及大理石平板的誤差影響進(jìn)行分析。
假設(shè)六面體工裝是以底面C為基準(zhǔn)加工其他表面,表2所示為六面體工裝各面需加工的精度項(xiàng)目及引起的誤差角。根據(jù)慣組測(cè)試標(biāo)定的誤差模型進(jìn)行12位置法翻轉(zhuǎn)時(shí)會(huì)引入工裝的誤差,直接影響慣組測(cè)試標(biāo)定結(jié)果,使得加速度計(jì)的標(biāo)定結(jié)果變差,具體分析如表2表示。
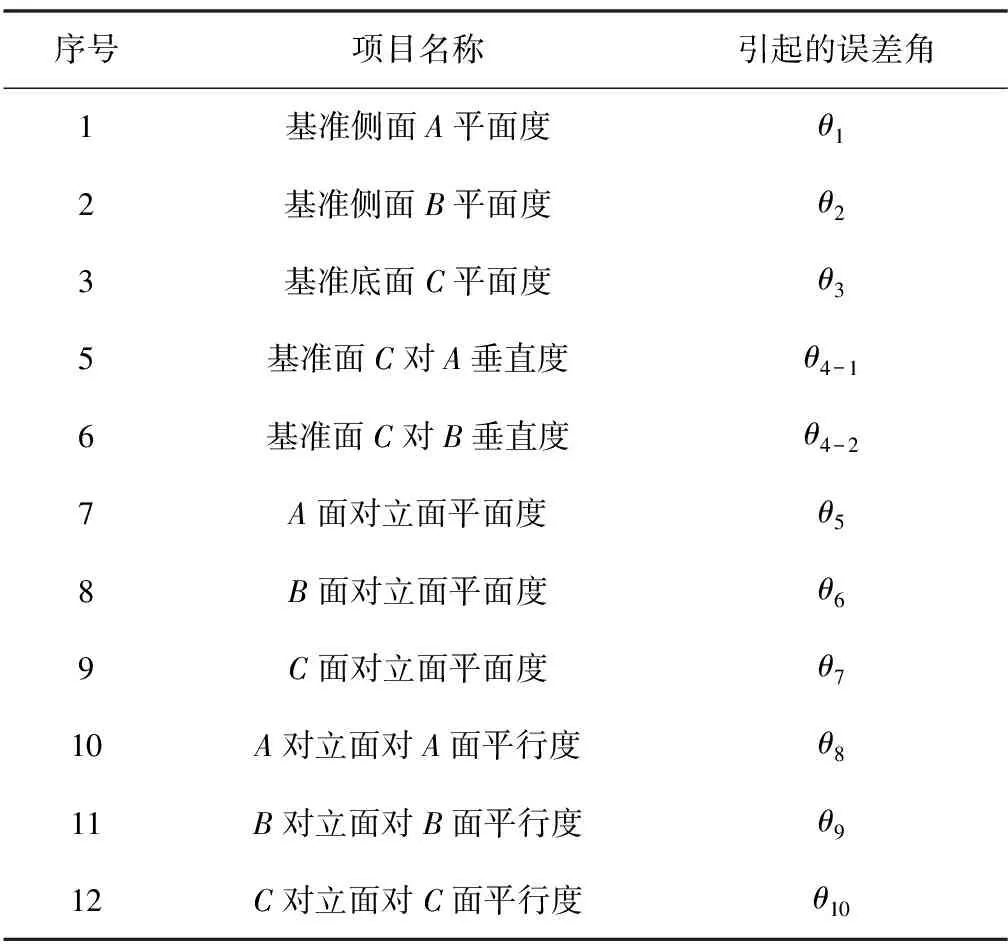
表2 六面體工裝誤差項(xiàng)目
假設(shè)慣組X軸向垂直C面,指向C面對(duì)立面;Y軸向垂直A面,指向A面對(duì)立面;Z軸向垂直B面,指向B面對(duì)立面,具體如圖1所示。
對(duì)六面體工裝精度對(duì)12位置法標(biāo)定中加表零偏值的影響進(jìn)行分析,根據(jù)表2,考慮六面體工裝誤差時(shí)各位置加速度計(jì)各軸的參考輸入如表3所示。

表3 十二位置標(biāo)定各軸參考輸入
將各軸參考輸入加速度代入加表組合模型中,可得加表的采樣輸出如式(12)
(12)
式中,加表輸出為采樣輸出,標(biāo)度因數(shù)、安裝誤差、零偏均為真實(shí)值。為簡(jiǎn)化分析,令表1中各誤差角均設(shè)置為等值θ。解算標(biāo)定參數(shù)時(shí),根據(jù)第3節(jié)中的公式,可推導(dǎo)出考慮六面體工裝誤差后標(biāo)定出的零偏測(cè)量如下。
12位置法
(13)
12位置二向法
(14)
(15)
(16)
12位置法解算出的零偏誤差為
(17)
12位置二向法解算出的零偏誤差為
(18)
忽略小量,可推知兩種零偏算法的誤差值分別為:
(19)
ΔDa2≈0
(20)
12位置解算方法中引入的誤差與工裝精度成正比,12位置二向法中引入的誤差均為小量,可忽略不計(jì)。
由理論推導(dǎo)可知,當(dāng)考慮六面體工裝誤差時(shí),12位置法解算出的零偏會(huì)引入六面體工裝誤差,而采用12位置二向法解算出的加表零偏基本不引入六面體工裝誤差。
4 仿真分析與驗(yàn)證
對(duì)12位置標(biāo)定進(jìn)行仿真,加速度計(jì)測(cè)量噪聲設(shè)置為10μg高斯白噪聲。正六面體工裝長(zhǎng)度為400mm,六面體工裝誤差項(xiàng)目中平面度、垂直度、平行度均為0.04。按表1所示12位置,每個(gè)位置靜態(tài)采集100s,采樣周期20ms,用于加速度計(jì)標(biāo)度因數(shù)、安裝誤差、零偏的標(biāo)定,加速度計(jì)標(biāo)定參數(shù)真值設(shè)定如表4所示,仿真結(jié)果如表5所示,標(biāo)定結(jié)果誤差對(duì)比如表6所示。

表4 加速度計(jì)標(biāo)定參數(shù)真值設(shè)定

表5 加速度計(jì)標(biāo)定參數(shù)仿真結(jié)果
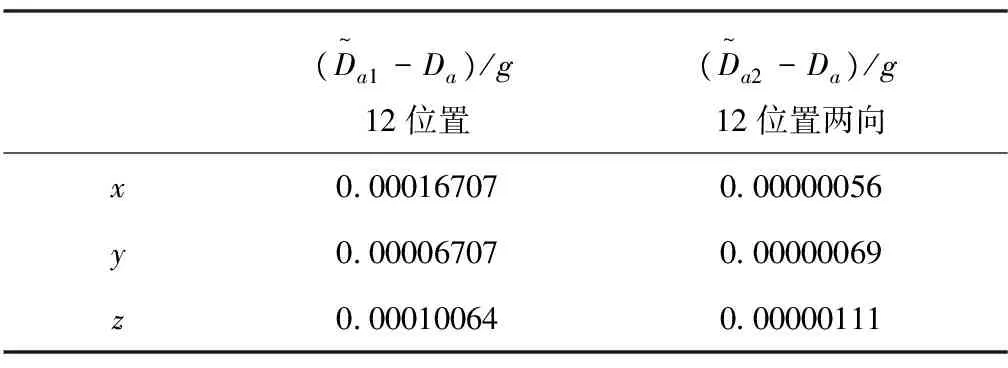
表6 零偏誤差對(duì)比
由仿真結(jié)果可以看出,考慮六面體工裝誤差的情況下,用12位置法解算出的零偏與真值偏差比用12位置二向法解算出的零偏與真值偏差大。
5 結(jié)論
本文針對(duì)采用大理石平板正六面體工裝對(duì)慣組12位置法標(biāo)定進(jìn)行分析,考慮工裝誤差,量化分析并比較了采用兩種解算方法時(shí)工裝的精度對(duì)加表零偏產(chǎn)生的影響,為如何根據(jù)標(biāo)定精度要求反提工裝精度要求提供理論依據(jù),并提出了一種減小加表零偏標(biāo)定誤差的解算方法。
當(dāng)長(zhǎng)寬高為400mm的工裝平面度、垂直度、平行度誤差均為0.04時(shí),采用12位置法解算加速度計(jì)零偏的標(biāo)定誤差達(dá)到0.0001g量級(jí);而采用12位置二向法解算加速度計(jì)零偏,誤差為10-7g量級(jí)。可以看出,12位置二向法解算出的加速度計(jì)零偏誤差遠(yuǎn)小于采用12位置法解算出的加速度計(jì)零偏誤差。為減小工裝誤差的影響,解算加速度計(jì)零偏時(shí)可采用12位置二向法。
[1]丁楓,馮麗爽,晁代宏,等.轉(zhuǎn)臺(tái)安裝誤差對(duì)光學(xué)捷聯(lián)慣導(dǎo)標(biāo)定的影響分析[J].彈箭與制導(dǎo)學(xué)報(bào),2013,33(1):19-24.
[2]聶夢(mèng)馨, 呂品, 賴際舟,等. 一種光纖IMU的雙軸非定向標(biāo)定方法[J]. 電子測(cè)量技術(shù), 2014, 37(8):123-128.
[3]趙剡, 張少辰, 胡濤. 慣性測(cè)量組件離心機(jī)標(biāo)定及誤差分析方法[J]. 北京理工大學(xué)學(xué)報(bào), 2015, 35(4):414-420.
[4]趙桂玲, 姜雨含, 李松. IMU標(biāo)定數(shù)學(xué)建模及誤差分析[J]. 傳感技術(shù)學(xué)報(bào), 2016, 29(6):886-891.
[5]胡夢(mèng)純, 徐挺, 黃云柯,等. 冗余結(jié)構(gòu)光纖陀螺捷聯(lián)慣組標(biāo)定優(yōu)化方法研究[J]. 上海航天, 2016, 33(s1):134-139.
[6]魏莉莉, 黃軍, 傅長(zhǎng)松,等. 帶斜置元件的光纖陀螺捷聯(lián)慣組標(biāo)定方法[J]. 中國(guó)慣性技術(shù)學(xué)報(bào), 2015(1):14-19.
[7]李政, 張志利, 周召發(fā). 基于雙軸位置轉(zhuǎn)臺(tái)的光纖陀螺慣組標(biāo)定方法[J]. 壓電與聲光, 2016(4):607-610.
[8]童樹(shù)兵, 張志利, 周召發(fā),等. 一種基于雙軸位置轉(zhuǎn)臺(tái)的IMU快速標(biāo)定方法[J]. 壓電與聲光, 2016, 38(5):815-818.
[9]彭孝東, 張鐵民, 李繼宇,等. 三軸數(shù)字MEMS加速度計(jì)現(xiàn)場(chǎng)標(biāo)定方法[J]. 振動(dòng)、測(cè)試與診斷, 2014, 34(3):544-548.
[10]江來(lái)偉, 崔希民, 袁德寶,等. 慣性測(cè)量單元基準(zhǔn)面與載體平臺(tái)的標(biāo)定方法研究[J]. 測(cè)繪工程, 2015(3):16-20.
[11]王堅(jiān), 梁建, 韓厚增. 低成本IMU的多位置旋轉(zhuǎn)現(xiàn)場(chǎng)標(biāo)定方法[J]. 中國(guó)慣性技術(shù)學(xué)報(bào), 2017, 25(3):294-298.
[12]烏偉, 趙嚴(yán), 寧永權(quán),等. 微慣性測(cè)量單元的標(biāo)定技術(shù)研究[J]. 電光與控制, 2013(8):54-57.
[13]李璞, 王麗華, 李明. 重復(fù)標(biāo)定的慣組誤差模型系數(shù)計(jì)算方法[J]. 導(dǎo)彈與航天運(yùn)載技術(shù), 2012(3):34-37.
[14]董春梅, 任順清, 陳希軍. 基于三軸轉(zhuǎn)臺(tái)誤差分析的IMU標(biāo)定方法[J]. 系統(tǒng)工程與電子技術(shù), 2016, 38(4):895-901.
[15]林強(qiáng). 高精度光纖陀螺標(biāo)度因數(shù)測(cè)試研究[J]. 現(xiàn)代導(dǎo)航, 2013(3):186-190.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫(huà)報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
