基于紅外識(shí)別技術(shù)的畜牧小車模型控制系統(tǒng)設(shè)計(jì)
2018-04-12 06:49:37李琳琳楊啟正賀沅瑋羅鑫鑫閆海峰
新疆農(nóng)墾科技 2018年2期
關(guān)鍵詞:模型
李琳琳 ,楊啟正*,賀沅瑋,羅鑫鑫,閆海峰
(1.湖南交通工程學(xué)院,湖南 衡陽 421000;2.遠(yuǎn)大住宅工業(yè)集團(tuán)股份有限公司)
0 引言
畜牧機(jī)械有加工機(jī)械、飼喂機(jī)械、養(yǎng)殖機(jī)械、防疫機(jī)械等,特別是針對(duì)群體飼喂的飼喂機(jī)械由于自動(dòng)化程度低,需要人工協(xié)助,勞動(dòng)強(qiáng)度大,工作效率低,因此,智能化小車是畜牧裝備機(jī)械發(fā)展的全新型科技產(chǎn)物,也是提高生產(chǎn)效率和勞動(dòng)強(qiáng)度的必然要求。智能化小車可以通過計(jì)算機(jī)對(duì)畜牧機(jī)械裝備進(jìn)行行駛控制,無需人工協(xié)助,是集中了計(jì)算機(jī)技術(shù)、傳感器技術(shù)、信息通訊技術(shù)、智能化技術(shù)、自動(dòng)行駛技術(shù)等綜合化程度較高的自動(dòng)化控制系統(tǒng)[1-3]。本文以畜牧裝備小車模型為研究對(duì)象,采用紅外循跡、紅外避障和紅外遙控等識(shí)別技術(shù),設(shè)計(jì)了一種基于紅外識(shí)別技術(shù)的畜牧裝備小車模型自動(dòng)控制系統(tǒng),實(shí)現(xiàn)了畜牧裝備小車模型自動(dòng)循跡、避障和遠(yuǎn)程控制,為畜牧機(jī)械裝備智能化發(fā)展奠定了基礎(chǔ)。
1 系統(tǒng)總體結(jié)構(gòu)及工作原理
自動(dòng)控制系統(tǒng)主要由STC89C52單片機(jī)、L298N電機(jī)驅(qū)動(dòng)模塊、藍(lán)牙模塊、紅外循跡模塊、紅外遙控模塊、紅外避障模塊等組成,系統(tǒng)結(jié)構(gòu)框圖如圖1所示。
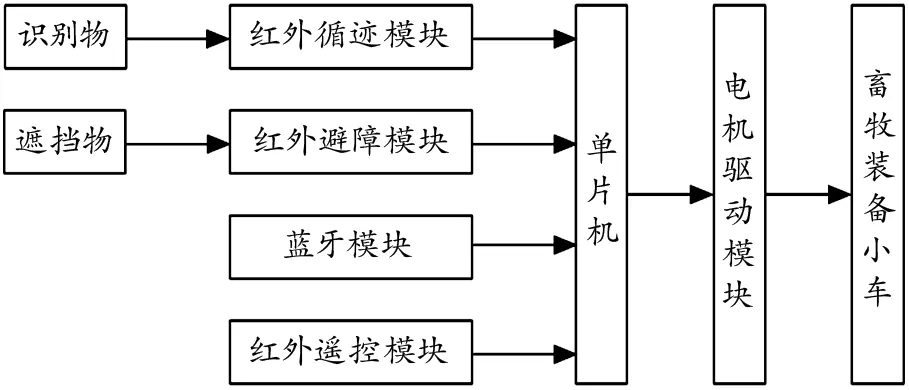
圖1 控制系統(tǒng)結(jié)構(gòu)
畜牧小車模型自動(dòng)控制系統(tǒng)以STC89C52單片機(jī)為控制核心,當(dāng)啟動(dòng)循跡模塊按鈕,系統(tǒng)切換成循跡模式,利用紅外循跡模塊中的反射式紅外傳感器識(shí)別路面上的黑色引導(dǎo)線并采集識(shí)別信號(hào),控制系統(tǒng)根據(jù)反饋信號(hào)進(jìn)行算法設(shè)計(jì),從而調(diào)節(jié)小車的行走軌跡,完成循跡畜牧裝備小車模型的自動(dòng)循跡。
當(dāng)啟動(dòng)紅外遙控模塊按鈕,系統(tǒng)切換成遙控模式,根據(jù)紅外遙控接收頭接收紅外遙控器的控制信號(hào),通過控制系統(tǒng)進(jìn)行解析,控制小車的行走路徑,實(shí)現(xiàn)畜牧裝備小車模型的無線遙控控制。
當(dāng)啟動(dòng)避障模塊按鈕,系統(tǒng)切換成避障模式,根據(jù)紅外避障模塊中的反射式紅外傳感器檢測(cè)小車行駛前方的障礙物,不斷檢測(cè)探測(cè)范圍內(nèi)是否有障礙物,如有障礙物存在,將信號(hào)傳送至單片機(jī)控制系統(tǒng),根據(jù)算法設(shè)計(jì)的避障路線進(jìn)行避障,從而實(shí)現(xiàn)避障功能。
當(dāng)小車處于藍(lán)牙模式工作狀態(tài)時(shí),打開專用機(jī)控制小車軌跡的APP,連接藍(lán)牙,當(dāng)連接成功時(shí),根據(jù)手機(jī)界面所顯示的控件指示,從而實(shí)現(xiàn)小車速度和方向的調(diào)節(jié),實(shí)現(xiàn)小車的藍(lán)牙控制功能。
2 系統(tǒng)主要模塊設(shè)計(jì)
2.1 循跡模塊
采用3路TCRT5000反射式紅外檢測(cè)傳感器、JY043W型光電管和LM393電壓比較器等硬件集成的循跡模塊,主要用來識(shí)別畜牧裝備小車工作過程中的黑白標(biāo)識(shí)物,通過紅外傳感器檢測(cè)到的信號(hào),控制直流電機(jī)的工作狀態(tài),完成畜牧裝備小車的自動(dòng)循跡。此循跡模塊結(jié)構(gòu)簡(jiǎn)單、便于安裝,3路反射式傳感器分別獨(dú)立工作,中控板與探頭分開,不受安裝位置的限制,工作電壓為3~6 V,電壓相對(duì)穩(wěn)定,探測(cè)距離范圍為10~120 mm,電路圖如圖2所示。
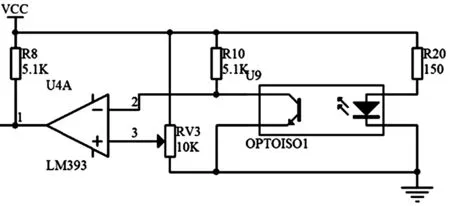
圖2 循跡模塊電路
2.2 紅外遙控模塊
紅外遙控模塊主要用來實(shí)現(xiàn)紅外信息的傳送,主要由發(fā)射、接收和調(diào)制三大部分組成,由紅外發(fā)射器將調(diào)制的編碼信號(hào)發(fā)出,通過紅外線傳送至接收端,解調(diào)為電信號(hào)后,傳送至單片機(jī)主控程序,完成紅外信息傳遞。此紅外遙控模塊采用HX1838傳感器,工作電壓為5 V,數(shù)字量輸出,測(cè)試距離為5~8 m,接收頻率為38 Hz遙控編碼,具有靈敏度高、干擾性強(qiáng)、信息傳輸可靠、功耗低、成本低等特點(diǎn),電路圖如圖3所示。
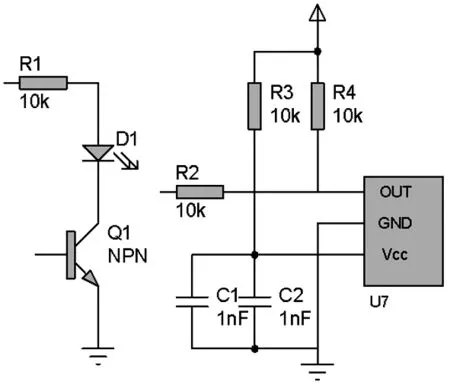
圖3 紅外遙控模塊電路
2.3 藍(lán)牙模塊
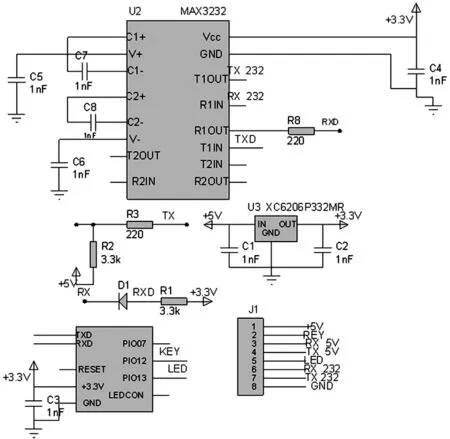
圖4 藍(lán)牙模塊電路
由片內(nèi)數(shù)字無線處理器DRP、數(shù)控振蕩器、片內(nèi)射頻收發(fā)開關(guān)、內(nèi)置ARM7嵌入式處理器等硬件集成的HC-06藍(lán)牙4.0模塊,主要用來接收射頻信號(hào),經(jīng)藍(lán)牙收發(fā)器直接傳輸?shù)交鶐盘?hào)處理器,與PC機(jī)上的RS232通信(圖4)。此藍(lán)牙模塊具有超低待機(jī)功耗,通訊距離為10~20 m,工作電壓范圍在3.6~6.0 V,傳輸速度為3 kb/s,反應(yīng)速度小于0.4 s,具有主從一體的通訊方式等特點(diǎn)。
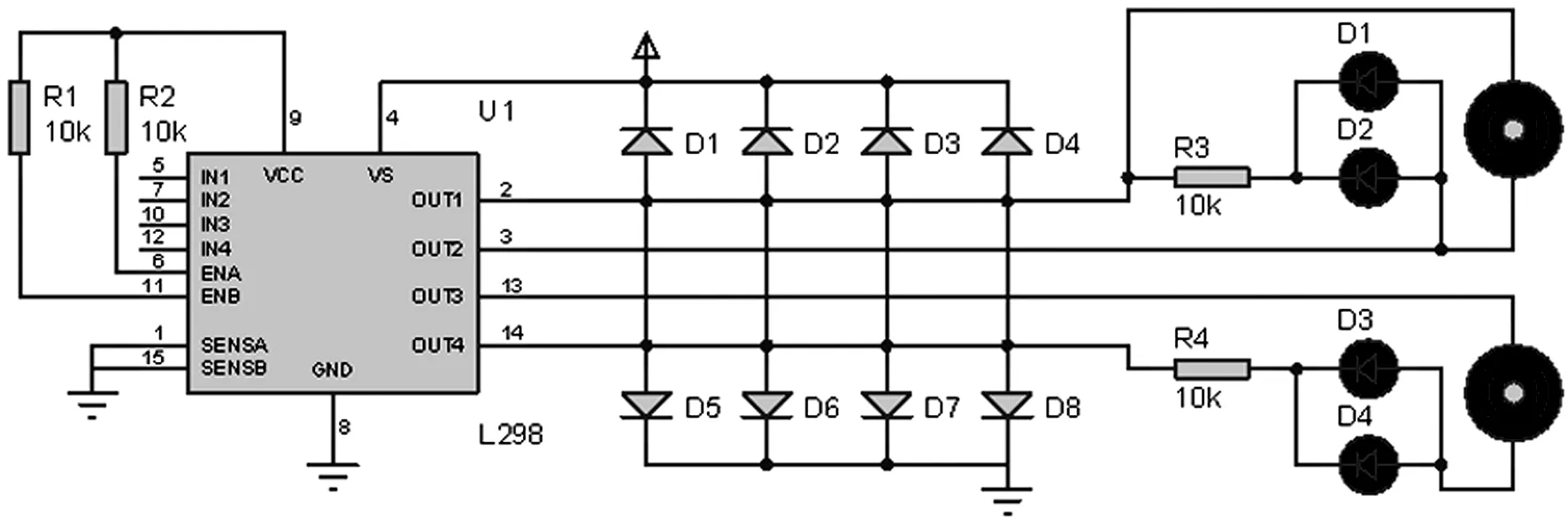
圖5 電機(jī)驅(qū)動(dòng)模塊電路
2.4 紅外避障模塊
紅外避障模塊主要用來檢測(cè)前進(jìn)方向是否存在障礙物,根據(jù)紅外傳感器反射回來的信號(hào),控制小車的轉(zhuǎn)向,從而準(zhǔn)確的避開障礙物。該模塊檢測(cè)距離為2~30 cm,檢測(cè)角度為35°,工作電壓范圍為3.3~5.0 V,具有距離可調(diào)節(jié)、干擾小、便于安裝、應(yīng)用廣泛、使用方便等特點(diǎn),紅外避障傳感器工作原理和紅外循跡傳感器的工作原理基本相同。
2.5 電機(jī)驅(qū)動(dòng)模塊
電機(jī)驅(qū)動(dòng)模塊采用L298N芯片構(gòu)成的H橋電機(jī)驅(qū)動(dòng),電路圖如圖5所示,主要包括4個(gè)三極管和1個(gè)電機(jī),4個(gè)三極管組成H橋的垂直線,而電機(jī)是H橋的橫線,根據(jù)三極管的導(dǎo)通狀態(tài)來控制電機(jī)的轉(zhuǎn)向,同時(shí)保證H橋同側(cè)的三極管不能同時(shí)導(dǎo)通。
3 系統(tǒng)測(cè)試與分析
3.1 硬件測(cè)試
按照預(yù)先設(shè)計(jì)的畜牧裝備小車模型自動(dòng)控制系統(tǒng)電路原理圖,將硬件電路圖中各元件焊接在一起組成控制板,然后采用萬用表測(cè)試控制板的電路連接狀態(tài),用萬用表的紅、黑表筆來測(cè)試電路板上每條走線,測(cè)量得到每條線路上的電阻值都非常小,證明線路連接完好無損,沒有斷路現(xiàn)象。
3.2 軟件調(diào)試
在keil軟件中將編寫好的畜牧裝備小車模型控制程序調(diào)試完畢,通過PZ-ISP燒錄軟件將調(diào)試完的程序燒錄至單片機(jī),利用單片機(jī)開發(fā)板進(jìn)行實(shí)驗(yàn)測(cè)試,測(cè)試結(jié)果同理論相一致。
4 小結(jié)
(1)以畜牧裝備小車模型為研究對(duì)象,采用紅外識(shí)別自動(dòng)控制系統(tǒng),主要由紅外循跡模塊、避障模塊、紅外遙控模塊、藍(lán)牙模塊和電機(jī)驅(qū)動(dòng)模塊等組成,實(shí)現(xiàn)了畜牧小車模型的自動(dòng)化控制。(2)硬件測(cè)試結(jié)果表明,線路連接完好無損,未出現(xiàn)斷路現(xiàn)象;軟件調(diào)試結(jié)果表明,實(shí)驗(yàn)測(cè)試結(jié)果與理論分析相一致[4-5]。
[1]卜雪民,錢峰.基于DSP的智能車輛系統(tǒng)移動(dòng)小車的設(shè)計(jì)[J].電子測(cè)量技術(shù),2007,30(10):81-83.
[2]羅錫文,區(qū)穎剛,趙祚喜,等.農(nóng)用智能移動(dòng)作業(yè)小車模型的研制[J].農(nóng)業(yè)工程學(xué)報(bào),2005,21(2):83-85.
[3]石偉.基于Labview和PID控制器的自動(dòng)移動(dòng)小車控制系統(tǒng)的實(shí)現(xiàn)[J].工業(yè)控制計(jì)算機(jī),2013,26(4):75-77.
[4]高振新,孫建紅.基于MSP430的智能循跡運(yùn)料小車設(shè)計(jì)[J].實(shí)驗(yàn)室研究與探索,2016,35(8):71-74.
[5]陶玉貴,章杰,汪金寶.基于STC89C52RC的智能小車設(shè)計(jì)[J].實(shí)驗(yàn)室研究與探索,2013,10(25):61-63.

猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
