基于線性濾波降階的串聯機械臂非線性反饋跟蹤控制
2018-04-12 04:23:30王東云李繼朋王璦琿蔡飛郭光復
計算技術與自動化 2018年1期
王東云 李繼朋 王璦琿 蔡飛 郭光復


摘要:設計了一種基于線性濾波降階的串聯機械臂非線性反饋跟蹤控制系統,實現了對機械臂關節位移和速度的全局指數跟蹤。首先,通過拉格朗日方法建立起兩自由度串聯機械臂的動態模型;其次,在系統模型中引入一個線性濾波器,將系統化解為關于線形濾波變量的一階動態方程,然后,設計非線性反饋控制器,通過前饋以補償系統的非線性和耦合性,并且通過李雅普諾夫穩定性方法證明了所設計控制器可實現系統的全局指數穩定,能完成對期望位移和速度的指數跟蹤;最后,通過仿真驗證了所提出方法的有效性。
關鍵詞:串聯機械臂;線性濾波;跟蹤控制;反饋線性化;李雅普諾夫函數;指數穩定
中圖分類號:TP241.2;TH16
文獻標志碼:A
1 引言
在現代的工業自動化領域中,工業串聯機器人扮演著一個重要的角色。串聯機器人(圖1)自上世紀中期開始出現,它的出現極大地提高了工業生產效率,許多人類無法直接進行的操作都可由機器人進行作業。隨著工業4.O的提出,智慧工廠已成為現代化的生產標志,工業機器人的應用更是其中必不可少的一項。而今,機器人已廣泛應用在工業、醫療、航天和服務等行業,進行著各種不同的作業[1-2]。
串聯機器人能否勝任特定的工業現場,主要在于機器人的控制問題,對串聯機器人的控制大體上可分為對位移、速度、加速度、末端操作力及力位混合控制幾種[4]。如果控制的目標是一個點,則屬于機器人的定點控制;如果控制的目標是讓末端操作器沿著一個預定的軌跡運動,則屬于連續軌跡的跟蹤控制。眾所周知,串聯機器人的動力學模型是一個高度復雜的非線性微分方程,各個關節之間具有高度的耦合性。此外,串聯機器人是一種典型的具有不確定性的控制對象,這些使得機器人的控制問題變得復雜[3]。
對串聯機器人的控制有很多的方法。其中,最簡單的控制方法是獨立關節的PID位置控制。PID位置控制的控制方式簡單,應用廣泛,但只能進行定點控制,且機器人控制輸入的初始力矩較大[4];自適應控制也是一種應用非常廣泛的控制方法,相較于其他的控制方式,自適應控制加入了一個系統參數的辨識環節,控制器能夠根據系統參數的變化不斷地調整自身的參數以適應環境的變化,很好的克服了機器人系統不確定性所帶來的影響[7-10]。但自適應控制控制律的設計較為復雜,且必須進行系統的參數辨識,這需要很大的在線運算量,給機器人的實際應用也帶來了困難[6];魯棒控制具有較強的抗干擾能力,很容易保證系統的穩定性,但在設計控制器時需要知道干擾的上下界[5]。根據機械臂的動力學特性,本文使用一種基于線性濾波的反饋線性化的控制方法,在機械臂的動態模型中引入一個線性濾波器,則系統的開環誤差模型變為了關于濾波器變量的一階線性微分方程,然后設計非線性控制器作為前饋補償以抵消系統的非線性,使得關節位移和速度能夠全局指數收斂于期望的位移和速度。
2 動力學模型
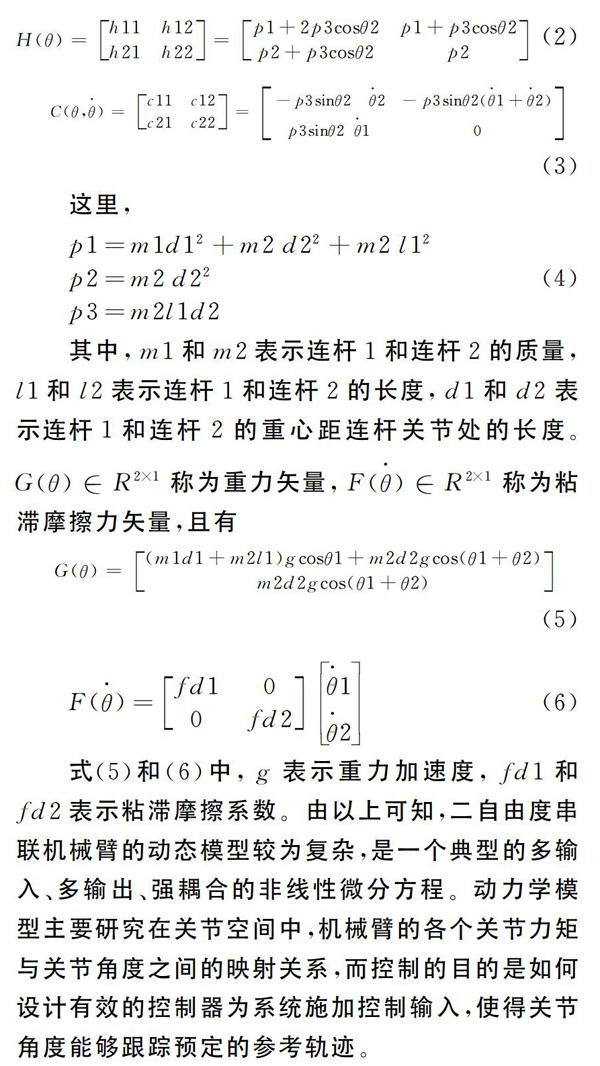
平面兩連桿剛性串聯機械臂(圖2)的動力學模型可由下列的二階非線性微分方程來描述
式(5)和(6)中,g表示重力加速度,fdl和fd2表示粘滯摩擦系數。由以上可知,二自由度串聯機械臂的動態模型較為復雜,是一個典型的多輸入、多輸出、強耦合的非線性微分方程。動力學模型主要研究在關節空間中,機械臂的各個關節力矩與關節角度之間的映射關系,而控制的目的是如何設計有效的控制器為系統施加控制輸入,使得關節角度能夠跟蹤預定的參考軌跡。
3 控制器設計
串聯機器人控制的目的是使各個關節的角位移能夠跟蹤預定的參考量,使得位置誤差以及速度誤差能夠盡快收斂到零。定義系統的位置誤差為
4 仿真結果及分析
根據式(1)所表述的串聯機器人的動力學模型,以及式(14)非線性反饋控制律,對整個閉環動態系統進行仿真。串聯機器人的結構參數取為m1=0.6kg,m2= 0.6kg,l1=1.2m,l2=0.8m,dl=0.6m,d2= 0.4m。由式(4)計算得pl= 1.176,p2=0.096,p3= 0.288。重力加速度取為g- 9.8m/s,粘滯摩擦系數取為fdl= 5.3,fd2= 1.1。式(8)中線性濾波增益取為α= 12,式(14)控制律中控制增益取為β=15。系統初始狀態取為θ=(0-1),θ=(0-0)。仿真結果如圖(3-6)所示,圖3表示角位移跟蹤曲線,圖4為速度跟蹤曲線,圖5表示控制輸入曲線,圖6為位置跟蹤誤差曲線。
由仿真結果可知,串聯機器人關節角位移對預定的關節角度具有很好的跟蹤特性。關節角位移在初始狀態下能夠迅速跟蹤上參考軌跡的變化,使得關節位置跟蹤誤差很快地收斂于零。關節速度在起始階段內經過了快速地變化之后也能跟蹤上參考軌跡速度的變化。由控制輸入曲線可知,系統的初始力矩不是很大,此后,關節力矩趨于平滑穩定,這也克服了傳統的PID等控制方法初始力矩過大的缺點。
對于串聯機器入而言,由于模型的復雜性,使得對于它的控制也變得困難。針對于具體的工業串聯機器人,很難找到一種控制律簡單,在線計算量不大,而又有很好控制效果的方法[2]。基于線性濾波降階的非線性反饋控制方法很好地補償了系統的非線性因素,控制器設計簡單,使得跟蹤誤差能以指數方式很快收斂于零,很好地提高了系統的跟蹤控制效果,同時也便于串聯機器人在實際工業現場的應用。
參考文獻
[1]冀寒松,郝敬賓,王飛龍,等,折疊雙臂式機器人的運動學與工作空間分析[J].科學技術與工程,2016, 16(25): 91 -98.
[2]鄧斌,李想,吳文海,等,四驅式爬纜機器人結構及動力學分析[J].科學技術與工程,2015,15(32):165-167.
[3]方勇純,盧桂章,非線性系統理論[M].北京:清華大學出版社,2009.
[4] 霍偉,機器人動力學與控制[M].北京:高等教育出版社,2005.
[5] 王耀南,機器人智能控制工程[M].北京:科學出版社,2004.
[6] 劉金琨,機器人控制系統的設計與MATLAB仿真[Ml.北京:清華大學出版,2008.
[7]TAKEYAKI M, ARIMOTO S.A now feedback method fordynamic control of manipulators[J]. AMSE J.of DynamicSystems, Measurement and Control, 1981, 102: 119-125.
[8]FREUND E. Fast nonlinear control with arbitrary pole place-ment for industrial robotand manipulators[J].J.Robotics Re-search, 1982,1:65-78.
[9] HAN Zheng-zhi,CHEN Guarrrong. Dynamic Coprime Fartorization for Nonlinear Systems[J]. Nonlinear Analysis,Theory, Methods, 1997, 305: 3113~3120.
[10] WANG A,DENG M Robust nonlinear control design to amanipulator based on operator based approach[J]. ICIC Ex-press Letters 2012,6:617-623.