模糊解耦算法在溫濕度控制中應用的研究
2018-04-12 04:23:30王洪航高巍
計算技術與自動化 2018年1期
王洪航 高巍
摘要:溫濕度試驗箱控制系統是一種非線性、強耦合、大滯后的系統。探究了智能解耦方法以及先進的PID控制算法的原理和特點,設計了基于模糊算法的解耦補償器,對溫濕度進行串聯補償解耦,使原本耦合的溫度、濕度變量等效成為兩個獨立的溫度與濕度控制子系統。在于系統的控制方面,采用基于模糊算法的自整定模糊PID算法進行控制。使控制效果更加精確、科學,以滿足試驗對人工模擬環境溫、濕度的要求和標準。本文給出了控制系統實現原理圖以及仿真試驗結果,試驗結果表明:該方法能較好的對溫度濕度進行控制且控制精度較高,響應快,能夠滿足溫濕度試驗箱溫濕度控制的要求。
關鍵詞:模糊控制;溫濕試驗箱;自適應PID。
中圖分類號:TP23
文獻標志碼:A
1 引言
溫濕度環境試驗系統可以模擬并提供一個特定的溫(濕)環境,主要用于評估產品在高低溫、溫(濕)環境中的性能和特性[3]。在包括汽車,摩托車,航空航天,工業,火箭,國防,大專院校,科研院所等的各個領域,電子元件和整個產品,他們都需要經過高低溫(濕)度環境試驗。
溫濕試驗箱的溫濕度控制是一種非線性的、時變的、滯后的、復雜控制過程[10],溫濕度之間存在耦合等難題,文獻[1]提及多數溫濕度試驗箱仍使用傳統PID控制,采用了平衡溫濕度控制方式(BTHC)。因此,多因素條件下的溫濕度(或濕熱)控制系統是一種多變量控制系統。
2 溫濕度控制算法
2.1 溫濕度試驗箱數學模型
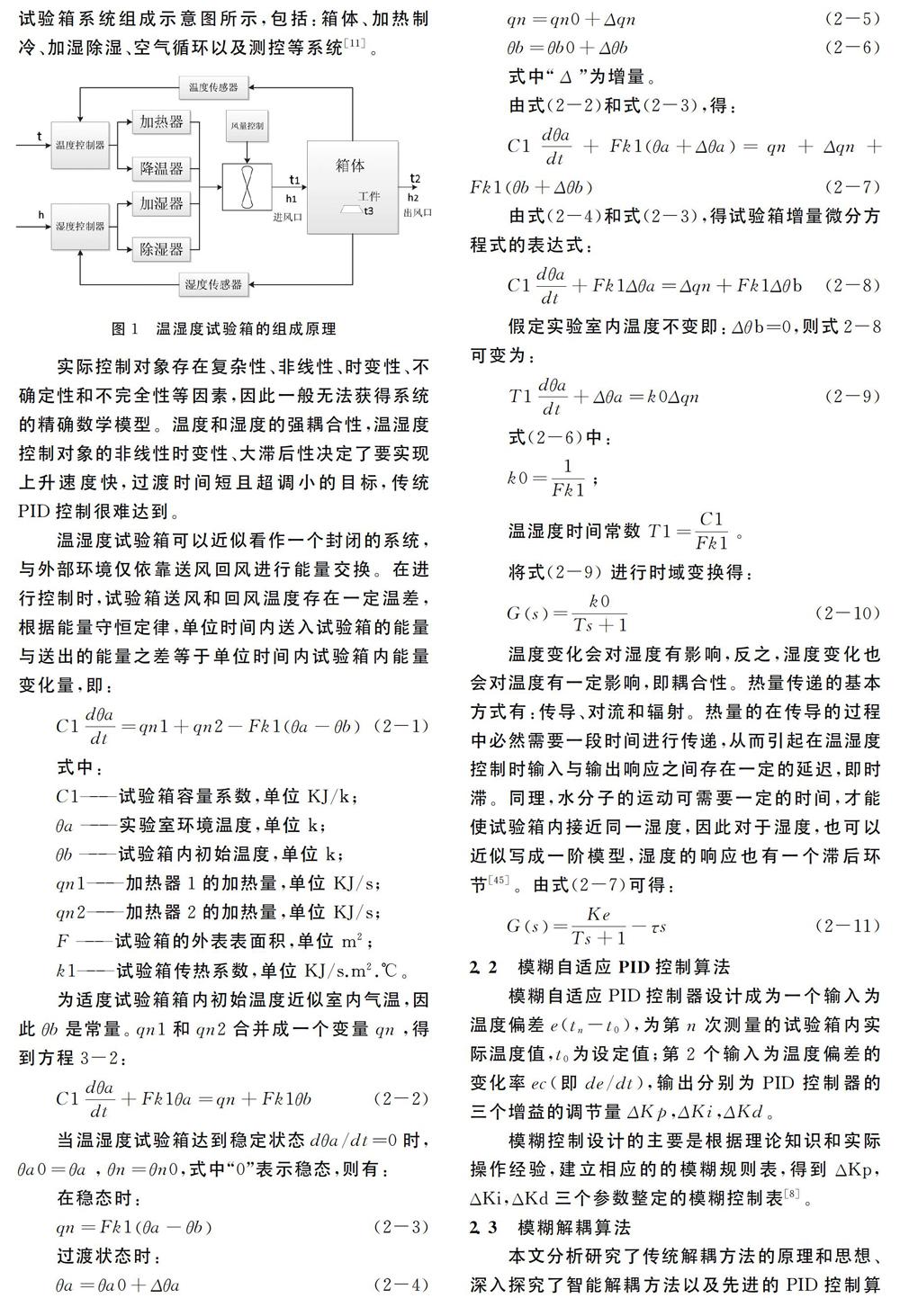
溫濕度試驗箱由多個系統組成,如圖1溫濕度試驗箱系統組成示意圖所示,包括:箱體、加熱制冷、加濕除濕、空氣循環以及測控等系統[11]。
實際控制對象存在復雜性、非線性、時變性、不確定性和不完全性等因素,因此一般無法獲得系統的精確數學模型。溫度和濕度的強耦合性,溫濕度控制對象的非線性時變性、大滯后性決定了要實現上升速度快,過渡時間短且超調小的目標,傳統PID控制很難達到。
溫濕度試驗箱可以近似看作一個封閉的系統,與外部環境僅依靠送風回風進行能量交換。在進行控制時,試驗箱送風和回風溫度存在一定溫差,根據能量守恒定律,單位時間內送入試驗箱的能量與送出的能量之差等于單位時間內試驗箱內能量變化量,即:
溫度變化會對濕度有影響,反之,濕度變化也會對溫度有一定影響,即耦合性。熱量傳遞的基本方式有:傳導、對流和輻射。熱量的在傳導的過程中必然需要一段時間進行傳遞,從而引起在溫濕度控制時輸入與輸出響應之間存在一定的延遲,即時滯。同理,水分子的運動可需要一定的時間,才能使試驗箱內接近同一濕度,因此對于濕度,也可以近似寫成一階模型,濕度的響應也有一個滯后環節[45]。由式(2-7)可得:
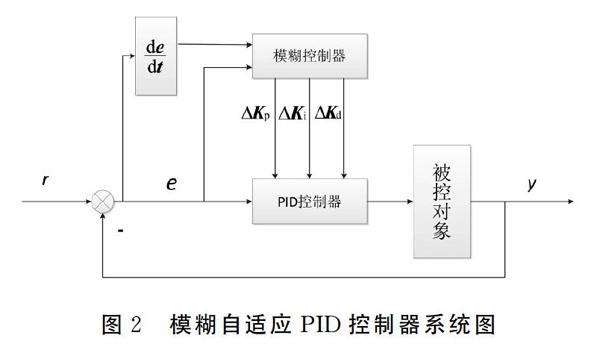
2.2 模糊自適應PID控制算法
模糊自適應PID控制器設計成為一個輸入為溫度偏差e(tn- t0),為第n次測量的試驗箱內實際溫度值,t0為設定值;第2個輸入為溫度偏差的變化率ec(即de/dt),輸出分別為PID控制器的三個增益的調節量△Kp,△Ki,△Kd。
模糊控制設計的主要是根據理論知識和實際操作經驗,建立相應的的模糊規則表,得到△Kp,△Ki,△Kd三個參數整定的模糊控制表[8]。
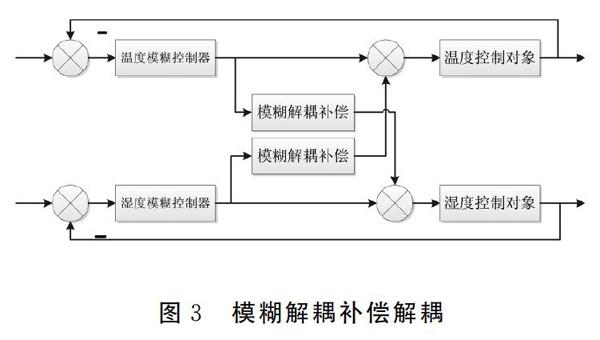
2.3 模糊解耦算法
本文分析研究了傳統解耦方法的原理和思想、深入探究了智能解耦方法以及先進的PID控制算法的原理和特點,設計了基于模糊算法的解耦補償器,對是溫濕度進行串聯補償解耦,使原本耦合的溫度、濕度變量等效成為兩個獨立的溫度與濕度控制子系統[11]。在子系統的控制方面,采用基于模糊算法的自整定模糊算法進行控制,輸出溫濕度控制量。
以溫度為例,圖中采用一維模糊控制器[10],Ke為量化因子,Ku為比例因子分別根據實際情況而定。設Ct為溫度控制器輸出,Cth為溫度模糊控制輸出對濕度控制的模糊補償。
3 仿真試驗
假定溫濕度試驗箱的廣義溫度對象近似為一階時滯環節[60]61],控制參數:τ=80,時間常數T-60,增益K=l。廣義濕度對象的模型參數為:純滯后τ=50,時間常數T=50,增益K=4。
自整定模糊PID與傳統PID進行對比仿真實驗框圖如圖4所示。
自整定模糊PID與傳統PID進行對比仿真實驗,其控制系統輸出響應曲線,輸入值交替變化的輸出響應曲線如圖5,圖6所示。
由圖5、圖6,通過對比和分析兩者的試驗結果可以看出:傳統PID控制的輸出響應超調量較大,調節時間較長,存在一定的振蕩。同時,為了消除傳統PID控制的超調,達到穩定狀態,需要再消耗一部分能源。而自整定模糊PID控制的輸出響應調節時間短、超調量小,系統很快達到穩態,具有振蕩小、魯棒性好、無穩態誤差等優點[10]。
當系統加隨機擾動時控制系統的輸出曲線,如圖7所示:
如圖7所示:當系統受到干擾時,傳統PID控制就不能取得較好的控制效果,而自整定模糊PID控制很快達到穩定,表現出了較強的魯棒性、穩定性。
綜上所述,在本設計中通過模糊算法進行有效的溫濕度解耦后溫濕度等效為兩個獨立控制的系統;在溫濕度控制系統中,自整定模糊PID控制器在控制過程中,實現了控制參數在線整定和修正;系統的響應速度快;調節精度高;穩態性能好;這是傳統PID控制器難以實現的,克服了傳統PID控制超調大,響應周期長的缺點,并且還可以降低能耗、達到節能減排的目的。
4結論
相對現在常用的溫濕度試驗箱控制方法,本文對溫濕度控制的精度較高,響應快,響應超調小。引入基于模糊解耦補償算法的模糊控制形成模糊溫濕度控制器,取長補短,發揮他們各自的優點,使控制效果更佳完美,算法適應性強。
參考文獻
[1] 沈榮林,恒溫恒濕箱的溫濕度調節方法[J].環境技術,1994,(01):42-45.
[2]吳志勇,畢德純,溫濕試驗箱發展綜述[J].裝備環境工程,2009,6(5):69-76.
[3]殷云華,樊水康,陳閩鄂,自適應模糊PID控制器的設計和仿真[J].火力與指揮控制.2008:90-99.
[4]黃力櫟,胡斌,羅昕,溫濕度解耦模糊控制系統的研究[J].農機化研究,2010:56-59.
[5]彭勇剛,韋巍,人工氣候箱溫濕度模糊控制[J].農業工程學報,2006,30(8):166-169.
[6]劉東文,嵌入式溫濕度控制器的研究與設計[D].貴陽:貴州大學,2008:65-79.
[7]欒瑞.無線溫濕度監測系統的設計[D].長春:吉林大學,2013:45-69.
[8] 肖世海,基于ARM的溫濕度控制器的設計[D].杭州:浙江大學,2007:32-78.
[9]顧德英,羅云林,馬淑華,計算機控制技術[M].北京:北京郵電大學出版社,2007:22-25.
[10] 王洪航,褚建新,張江明,等.基于模糊控制的溫濕度試驗系統的研究[J].化工儀表與自動化2015,(03):300-302.
[11]王洪航,溫濕度環境試驗控制系統研究[D].上海:上海海事大學,2016:76-98.