基于隱馬爾可夫模型與反向傳播神經(jīng)網(wǎng)絡(luò)的運(yùn)動(dòng)型多功能汽車運(yùn)動(dòng)參數(shù)預(yù)測(cè)*
2018-04-16 08:35:10李智宏姚嘉凌
裝備機(jī)械 2018年1期
關(guān)鍵詞:模型
□李智宏 □姚嘉凌 □汪 蕊
南京林業(yè)大學(xué) 汽車與交通工程學(xué)院 南京 210037
1 研究背景
側(cè)翻是車輛最危險(xiǎn)的事故之一,帶來(lái)的后果極其嚴(yán)重,是道路交通安全的主要問(wèn)題。與其它車輛相比,運(yùn)動(dòng)型多功能汽車(SUV)的行車環(huán)境相對(duì)復(fù)雜,且質(zhì)心較高,行駛中極易發(fā)生側(cè)翻事故。因此,如何提高SUV的防側(cè)翻能力,保證行駛的安全性,已成為SUV研究的焦點(diǎn)問(wèn)題。
車輛側(cè)翻一般在較短時(shí)間內(nèi)發(fā)生,側(cè)翻前駕駛員感受不到車輛的側(cè)傾狀態(tài),無(wú)法及時(shí)采取有效措施防止側(cè)翻。因此,對(duì)車輛的運(yùn)動(dòng)狀態(tài)進(jìn)行預(yù)測(cè),并判斷可能會(huì)發(fā)生的側(cè)翻,提前發(fā)出報(bào)警,可以有效防止側(cè)翻發(fā)生,進(jìn)而大大提高車輛行駛的安全性。近年來(lái),隱馬爾可夫模型(HMM)在預(yù)測(cè)系統(tǒng)狀態(tài)的研究中得到了人們的重視,并有諸多研究成果。文獻(xiàn)[1]針對(duì)無(wú)人駕駛車輛設(shè)計(jì)了一套行駛狀態(tài)預(yù)測(cè)系統(tǒng),采用HMM辨識(shí)車輛的行駛狀態(tài),預(yù)測(cè)駕駛員的駕駛行為。仿真表明,這一系統(tǒng)可以對(duì)無(wú)人駕駛車輛的未知決策做出實(shí)時(shí)準(zhǔn)確的判斷。文獻(xiàn)[2]建立了一種基于HMM的車輛狀態(tài)辨識(shí)系統(tǒng),這一辨識(shí)系統(tǒng)通過(guò)實(shí)時(shí)計(jì)算和分析,采集車輛行駛影像記錄數(shù)據(jù),預(yù)測(cè)行駛車輛的縱向車速。文獻(xiàn)[3]設(shè)計(jì)了一種基于HMM的車輛行駛狀態(tài)辨識(shí)系統(tǒng),通過(guò)采集車輛的側(cè)向加速度數(shù)據(jù)來(lái)識(shí)別車輛的行駛狀態(tài),這一辨識(shí)系統(tǒng)還可以辨識(shí)制動(dòng)、加速等駕駛狀態(tài)。文獻(xiàn)[4]在考慮駕駛員駕駛意圖的基礎(chǔ)上,構(gòu)建了基于HMM的駕駛意圖辨識(shí)模型,對(duì)駕駛員的意圖有較高的辨識(shí)度,并具有一定的預(yù)警能力。文獻(xiàn)[5]在重型車輛側(cè)翻預(yù)警系統(tǒng)研究中,采用一種基于雙層HMM的重型車輛行駛狀態(tài)辨識(shí)方法,采集車輛橫擺運(yùn)動(dòng)、轉(zhuǎn)向運(yùn)動(dòng)、側(cè)向運(yùn)動(dòng)等運(yùn)動(dòng)狀態(tài)信息和車速信息,動(dòng)態(tài)辨識(shí)重型車輛的行駛狀態(tài)。仿真結(jié)果驗(yàn)證了這一方法的有效性。文獻(xiàn)[6]提出了一種基于經(jīng)驗(yàn)?zāi)B(tài)分解(EMD)與反向傳播(BP)神經(jīng)網(wǎng)絡(luò)相結(jié)合的車輛關(guān)門聲品質(zhì)預(yù)測(cè)方法,以關(guān)門聲信號(hào)特征作為輸入,以主觀評(píng)價(jià)值作為輸出,采用神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,得到基于EMD的車輛關(guān)門聲品質(zhì)預(yù)測(cè)模型。結(jié)果表明,基于這一模型的預(yù)測(cè)數(shù)據(jù)更接近主觀評(píng)價(jià)結(jié)果,具有較高的聲品質(zhì)預(yù)測(cè)精度。
筆者將HMM與BP神經(jīng)網(wǎng)絡(luò)相結(jié)合[7-8],應(yīng)用馬爾可夫預(yù)測(cè)算法對(duì)下一時(shí)間段SUV的行駛運(yùn)動(dòng)狀態(tài)進(jìn)行預(yù)測(cè),用預(yù)測(cè)出的車輛運(yùn)動(dòng)狀態(tài)作為BP神經(jīng)網(wǎng)絡(luò)模型的輸入,預(yù)測(cè)車輛的具體運(yùn)動(dòng)參數(shù),包括側(cè)傾角、側(cè)向加速度及方向盤轉(zhuǎn)角等,可以使駕駛員能更加直觀地觀察車輛的傾斜程度,量化判斷是否會(huì)發(fā)生側(cè)翻,從而采取相應(yīng)的措施防止車輛側(cè)翻。另一方面,BP神經(jīng)網(wǎng)絡(luò)模型預(yù)測(cè)的參數(shù)還可以用于電子控制。
2 HMM建模及預(yù)測(cè)
筆者所建立的HMM是多維高斯HMM。模型的底層為可觀測(cè)矢量序列,即當(dāng)前的側(cè)傾角和側(cè)向加速度。模型的高層為不可觀測(cè)的SUV運(yùn)動(dòng)狀態(tài),包括直線行駛狀態(tài)、正常轉(zhuǎn)向狀態(tài)、緊急轉(zhuǎn)向狀態(tài)和側(cè)傾行駛狀態(tài)。如圖1所示,Q為可觀察矢量序列;a1j為轉(zhuǎn)移概率,j=1,2,3,4;bij為觀察概率,i=1,2,3,4。底層HMM進(jìn)行統(tǒng)計(jì)學(xué)習(xí)和概率推理后,被輸送至高層HMM,從而預(yù)測(cè)車輛未來(lái)的行駛狀態(tài),判斷是否會(huì)發(fā)生側(cè)翻。

圖1 多維高斯HMM結(jié)構(gòu)
首先要進(jìn)行HMM學(xué)習(xí),即確定HMM的相應(yīng)參數(shù)。λ 為模型估計(jì)參數(shù),λ=(t,A,C,μ,U),其中 t為初始狀態(tài)分布,A為狀態(tài)轉(zhuǎn)移概率矩陣,C為混合權(quán)重矩陣,μ為均值矢量,U為協(xié)方差矩陣。
模型的可觀測(cè)矢量序列 Q={q1,q2,…,qN},其中,qk為第k個(gè)觀測(cè)矢量,k=1,2,…N,隱藏的狀態(tài)序列O={o1,o2,…,oN}。
多維高斯HMM的可觀測(cè)矢量序列Q由混合高斯概率密度函數(shù)bi(Q)產(chǎn)生:

式中:cij為系統(tǒng)混合高斯元的混合權(quán)重因數(shù);μij為系統(tǒng)高斯密度函數(shù)的均值矢量。
確定模型估計(jì)參數(shù) λ=(t,A,C,μ,U)中各元素時(shí),將HMM工具箱加載到MATLAB工程數(shù)學(xué)軟件中,編寫.m文件程序,選用HMM的Baum-Welch算法,訓(xùn)練SUV運(yùn)行狀態(tài)的多維高斯HMM。訓(xùn)練后得到如下結(jié)果:

在對(duì)車輛在復(fù)雜工況下的行駛狀態(tài)進(jìn)行辨識(shí)的基礎(chǔ)上,采用HMM對(duì)車輛運(yùn)動(dòng)狀態(tài)進(jìn)行預(yù)測(cè)仿真,預(yù)測(cè)仿真結(jié)果如圖2所示。
3 BP神經(jīng)網(wǎng)絡(luò)

圖2 HMM預(yù)測(cè)仿真結(jié)果
人工神經(jīng)網(wǎng)絡(luò)是一種運(yùn)算模型,它從信息處理角度對(duì)人腦神經(jīng)元網(wǎng)絡(luò)進(jìn)行抽象,建立一種簡(jiǎn)單模型,并按不同的連接方式組成不同的網(wǎng)絡(luò),是對(duì)人腦的簡(jiǎn)化和抽象。人工神經(jīng)網(wǎng)絡(luò)由于結(jié)構(gòu)簡(jiǎn)單、自學(xué)習(xí)能力強(qiáng),并具有良好的穩(wěn)定性,因此廣泛應(yīng)用于預(yù)測(cè)估計(jì)、自動(dòng)控制、模式識(shí)別等眾多領(lǐng)域[9]。
BP神經(jīng)網(wǎng)絡(luò)是一種具有三層或三層以上無(wú)反饋的人工神經(jīng)網(wǎng)絡(luò),其結(jié)構(gòu)如圖3所示[10]。BP神經(jīng)網(wǎng)絡(luò)通常由輸入層、隱含層和輸出層組成,各層神經(jīng)元之間全部連接,外部數(shù)據(jù)變量輸入到輸入層,經(jīng)過(guò)隱含層處理后,傳遞給輸出層,由輸出層輸出數(shù)據(jù)處理結(jié)果。

圖3 BP神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
BP神經(jīng)網(wǎng)絡(luò)在建模時(shí)要確定網(wǎng)絡(luò)的結(jié)構(gòu)和參數(shù),使網(wǎng)絡(luò)達(dá)到最優(yōu),從而提高整個(gè)網(wǎng)絡(luò)的準(zhǔn)確性和學(xué)習(xí)效率。隱含層的層數(shù)影響模型的訓(xùn)練速度,筆者選用具有三層結(jié)構(gòu)的Sigmoid函數(shù)。在神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)中,第p個(gè)樣本的誤差Ep為:

式中:ypi為第p個(gè)樣本第i個(gè)單元的期望輸出值為第p個(gè)樣本第i個(gè)單元的實(shí)際輸出值。
學(xué)習(xí)算法采用梯度下降法,沿誤差變化的負(fù)梯度方向修正網(wǎng)絡(luò)權(quán)值。調(diào)整權(quán)因數(shù)Wij,使誤差Ep<ε,ε 為系統(tǒng)誤差精度。
筆者選用BP神經(jīng)網(wǎng)絡(luò)建模,神經(jīng)網(wǎng)絡(luò)參數(shù)的選取對(duì)網(wǎng)絡(luò)的訓(xùn)練結(jié)果有較大影響[11]。學(xué)習(xí)速率過(guò)大,容易導(dǎo)致網(wǎng)絡(luò)不穩(wěn)定;學(xué)習(xí)速率過(guò)小,則會(huì)導(dǎo)致收斂速度較慢。學(xué)習(xí)速率的取值范圍為0.01~0.8,通過(guò)多次試驗(yàn),確認(rèn)取0.1較為合適。選擇Tansig函數(shù)作為隱含層的處理函數(shù),訓(xùn)練函數(shù)選用動(dòng)量自適應(yīng)學(xué)習(xí)速率梯度下降法,神經(jīng)元的節(jié)點(diǎn)數(shù)為15,動(dòng)量因子為0.95。
4 SUV運(yùn)動(dòng)參數(shù)預(yù)測(cè)
HMM能夠預(yù)測(cè)SUV下一時(shí)間段的運(yùn)動(dòng)狀態(tài),從而判斷是否會(huì)發(fā)生側(cè)翻,但是不能預(yù)測(cè)出車輛下一時(shí)間段的具體運(yùn)動(dòng)參數(shù),如方向盤轉(zhuǎn)角、側(cè)傾角和側(cè)向加速度等。車輛下一時(shí)段的具體運(yùn)動(dòng)參數(shù)可使駕駛員量化判斷是否會(huì)側(cè)翻,也可為抗側(cè)翻電子控制系統(tǒng)提供數(shù)據(jù),因此對(duì)車輛運(yùn)動(dòng)參數(shù)進(jìn)行預(yù)測(cè)很有必要。圖4為HMM與BP神經(jīng)網(wǎng)絡(luò)結(jié)合流程框圖。首先選用Carsim軟件對(duì)車輛進(jìn)行仿真試驗(yàn),選擇四種典型工況進(jìn)行仿真,采集車輛在四種工況下的運(yùn)動(dòng)參數(shù),包括側(cè)向加速度、側(cè)傾角等,作為HMM的數(shù)據(jù)輸入。然后建立四種典型工況下的HMM,預(yù)測(cè)車輛下一時(shí)間段的運(yùn)動(dòng)狀態(tài)。最后將HMM預(yù)測(cè)出的車輛運(yùn)動(dòng)狀態(tài)作為BP神經(jīng)網(wǎng)絡(luò)的輸入,從而預(yù)測(cè)出車輛下一時(shí)間段的具體運(yùn)動(dòng)參數(shù)。

圖4 HMM與BP神經(jīng)網(wǎng)絡(luò)結(jié)合流程框圖
選取斜坡轉(zhuǎn)向和雙移線轉(zhuǎn)向進(jìn)行SUV運(yùn)動(dòng)參數(shù)預(yù)測(cè),分別驗(yàn)證方向盤轉(zhuǎn)角在下一時(shí)間段的數(shù)據(jù)。在HMM預(yù)測(cè)到下一個(gè)時(shí)間段的車輛運(yùn)動(dòng)狀態(tài)后,將當(dāng)前運(yùn)動(dòng)參數(shù)和以往試驗(yàn)獲得的下一時(shí)間段車輛運(yùn)動(dòng)參數(shù)作為BP神經(jīng)網(wǎng)絡(luò)的訓(xùn)練樣本。
圖5所示為斜坡轉(zhuǎn)向時(shí)方向盤轉(zhuǎn)角的試驗(yàn)數(shù)據(jù)。圖6所示為斜坡轉(zhuǎn)向時(shí)使用BP神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)的方向盤轉(zhuǎn)角數(shù)據(jù)和試驗(yàn)數(shù)據(jù)對(duì)比。圖7所示為雙移線轉(zhuǎn)向時(shí)方向盤轉(zhuǎn)角的試驗(yàn)數(shù)據(jù)。圖8所示為雙移線轉(zhuǎn)向時(shí)使用BP神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)的方向盤轉(zhuǎn)角數(shù)據(jù)和試驗(yàn)數(shù)據(jù)的對(duì)比。由圖6和圖8可知,在斜坡轉(zhuǎn)向和雙移線轉(zhuǎn)向時(shí)方向盤轉(zhuǎn)角的預(yù)測(cè)數(shù)據(jù)和試驗(yàn)數(shù)據(jù)基本吻合,可見(jiàn),將HMM和BP神經(jīng)網(wǎng)絡(luò)相結(jié)合,可以有效預(yù)測(cè)車輛在下一時(shí)間段的運(yùn)動(dòng)參數(shù)。

圖5 斜坡轉(zhuǎn)向時(shí)方向盤轉(zhuǎn)角試驗(yàn)數(shù)據(jù)

圖6 斜坡轉(zhuǎn)向時(shí)方向盤轉(zhuǎn)角數(shù)據(jù)對(duì)比
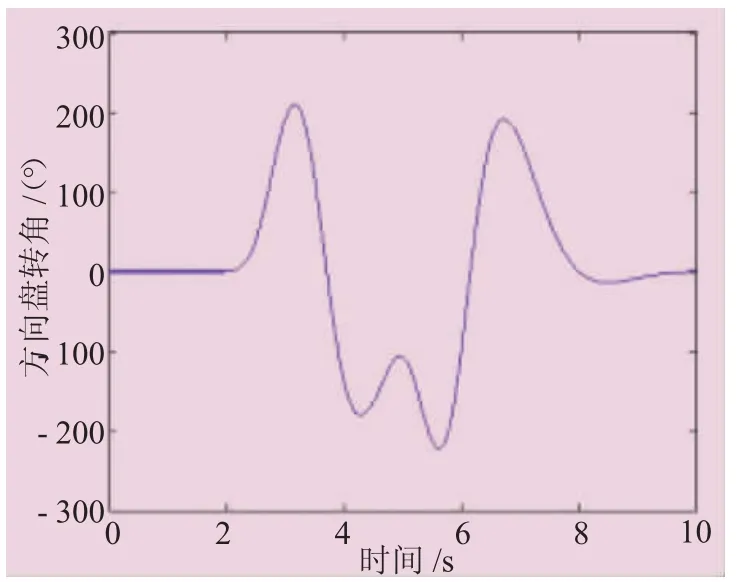
圖7 雙移線轉(zhuǎn)向時(shí)方向盤轉(zhuǎn)角試驗(yàn)數(shù)據(jù)
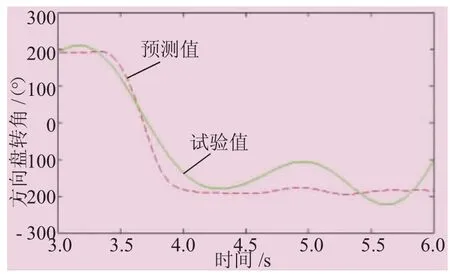
圖8 雙移線轉(zhuǎn)向時(shí)方向盤轉(zhuǎn)角數(shù)據(jù)對(duì)比
5 總結(jié)
筆者將HMM和BP神經(jīng)網(wǎng)絡(luò)相結(jié)合,對(duì)SUV運(yùn)動(dòng)參數(shù)進(jìn)行預(yù)測(cè),將HMM的初步辨識(shí)和預(yù)測(cè)結(jié)果作為BP神經(jīng)網(wǎng)絡(luò)的訓(xùn)練樣本,對(duì)BP神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,這樣可以準(zhǔn)確預(yù)測(cè)出在下一時(shí)間段內(nèi)車輛的運(yùn)動(dòng)參數(shù),為駕駛員直觀判斷側(cè)翻和電子控制提供依據(jù)。
[1]GADEPALLY V,KURT A,KRISHNAMURTHY A,et al.Driver/Vehicle State Estimation and Detection[C].Intelligent Transportation Systems(ITSC),2011 14th International IEEE Conference on,Washington DC,2011.
[2]LIN C C,WANG M S.Vehicle Speeding Early Warning Model Using Frame Feature Detection and HMM[C].Consumer Electronics(ISCE),2011 IEEE 15th International Symposiumon,Singapore,2011.
[3]MAGHSOOD R,JOHANNESSON P.Detection ofthe Curves Based on Lateral Acceleration Using Hidden Markov Models[J].Procedia Engineering,2013,66:425-434.
[4] 馬晶晶.基于隱馬爾可夫理論的駕駛意圖辨識(shí)研究[D].長(zhǎng)沙:長(zhǎng)沙理工大學(xué),2012.
[5] 朱天軍,孔現(xiàn)偉,李彬.基于雙層隱馬爾可夫模型的重型車輛行駛狀態(tài)辨識(shí)方法研究[J].兵工學(xué)報(bào),2015,36(10):1832-1840.
[6] 楊川,于德介,徐亞軍.基于EMD與BP神經(jīng)網(wǎng)絡(luò)的汽車關(guān)門聲品質(zhì)預(yù)測(cè)[J].汽車工程,2013,35(5):457-461,466.
[7] 楊勵(lì)雅,邵春福.基于BP神經(jīng)網(wǎng)絡(luò)與馬爾可夫鏈的城市軌道交通周邊房地產(chǎn)價(jià)格的組合預(yù)測(cè)方法[J].吉林大學(xué)學(xué)報(bào)(工學(xué)版),2008,38(3):514-519.
[8] 王少然,劉文慧.基于GM(1,1)回歸的需求預(yù)測(cè)優(yōu)化模型研究[J].機(jī)械制造,2016,54(11):1-4.
[9] 吳昌友.神經(jīng)網(wǎng)絡(luò)的研究及應(yīng)用[D].哈爾濱:東北農(nóng)業(yè)大學(xué),2007.
[10趙俊杰.基于模糊神經(jīng)網(wǎng)絡(luò)的汽車故障診斷方法研究[D].杭州:杭州電子科技大學(xué),2011.
[11]韓雪.基于參數(shù)選取影響B(tài)P神經(jīng)網(wǎng)絡(luò)訓(xùn)練結(jié)果的分析[J].智能計(jì)算機(jī)與應(yīng)用,2011(5):43-46.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
