盾構機管片拼裝自動控制傳感檢測系統的設計
2018-04-16 03:03:54王海波范曙遠
機械制造 2018年2期
□ 張 龍 □ 王海波 □ 范曙遠
西南交通大學機械工程學院 成都 610000
1 設計背景
管片拼裝的一般流程為管片供給、管片夾持、管片定位、姿態調整、螺栓連接,其中管片定位和姿態調整是兩個核心步驟,也是實現自動化控制的重點和難點。只有對管片姿態和定位信息進行有效檢測,針對采集到的有效檢測數據,通過自動控制技術對管片姿態和位置進行調整,才能實現管片拼裝的自動化控制。在當前管片自動化拼裝的研究中,尚未出現成熟穩定的管片檢測系統,現有系統普遍存在復雜、檢測精度低等弊端。筆者以國內地鐵施工中較為常用的ZTE6250型土壓平衡式盾構機為研究對象,針對管片拼裝過程中姿態和位置的檢測問題,設計了一套基于圖像識別技術的盾構機管片拼裝自動控制傳感檢測系統。與現有系統相比,這一系統具有設計簡單、檢測精度高、非接觸性測量等優點,能更好地適用于盾構機管片拼裝的自動化控制。
2 系統設計
2.1 系統組成
基于圖像識別技術的盾構機管片拼裝自動控制傳感檢測系統采用電液比例控制技術與計算機技術相結合的方法,實現管片自動化拼裝。控制系統以可編程序控制器(PLC)為核心,以電液比例閥為液壓傳動系統的控制元件,實現壓力、位移、流量、速度等輸出量的精確控制。管片位置、姿態的精確測量和反饋,是實現管片精準、高效拼裝的關鍵。基于由圖像采集卡采集得到的布置在管片特定位置的靶標數據,計算出管片位置和姿態數據,再由計算機根據相關數據發出指令完成控制,從而實現管片的自動拼裝過程。盾構機管片拼裝自動控制傳感檢測系統如圖1所示,主要由測量平面、計算機、紅外光源、激光測距裝置、工業相機等組成。

▲圖1 盾構機管片拼裝自動控制傳感檢測系統
2.2 靶標的設計與布置
根據傳感檢測的需求,設計了基于標記圓的平面靶標,如圖2所示。靶標中含有直徑大小不一的圓,且大小圓直徑之比為7∶5。為方便提取數據,采用同等尺寸的圓環代替大圓,作為標記圓環。通過圖像處理能準確提取靶標上的特征點,即圓環中心,同時根據標記圓環的拓撲位置關系,可確定靶標方向。
靶標在盾構管片上的布置如圖3所示,四個靶標分別布置在盾構管片側向的四個螺栓孔外側,靶標中央與螺栓孔中間刻線對齊,此時四個靶標處于同一個平面上。管片兩側向靶標反向布置,可便于區分管片兩側的方向。

▲圖2 平面靶標

▲圖3 靶標布置示意圖
2.3 主要硬件布置
如圖4所示,兩臺工業相機及紅外光源剛性對稱安裝在舉重鉗與舉升油缸的連接端,可跟隨舉重鉗作平移和回轉運動,使相機對測量平面保持固定的視角。激光測距裝置安裝在兩臺舉升油缸的套筒中央位置,通過回轉中心,高度位置不會隨舉升油缸的位移而發生變化。

圖4 盾構機管片拼裝自動控制傳感檢測系統硬件布置
3 管片定位
3.1 機構原理
管片定位機構由舉升機構、平移機構和回轉機構組成,動力依次來源于舉升油缸、平移油缸和液壓回轉馬達。在舉重鉗抓取管片后,系統依次完成粗調定位和精確定位。粗調定位時,根據管片拼裝規律確定的三個系統預設值——舉升高度、平移距離、回轉角,定位機構由各油缸帶動管片到達預拼裝區域。精確定位時,為確保兩環管片能通過螺栓孔穩固連接,預拼裝管片與已拼裝管片需按施工要求錯縫對齊并靠攏,且在環向處于同一高度。可見,管片精確定位傳感檢測子系統需通過視覺測量來獲得管片的精確回轉角和徑向舉升距離,其中精確回轉角的解算尤為重要。
3.2 精確回轉角解算原理
以管片拼裝系統托梁中心為原點建立世界坐標系OW-XWYWZW,測量并求解各值。管片定位靶標圖像如圖5所示,當完成初始環向回轉和徑向舉升后,單臺工業相機可以獲得管片上的靶標A和前一環相鄰管片側向靶標 C′的圖像。由于靶標A和靶標C′方向不同,因此可進行區分。基于單目視覺測量模型,通過靶標A和靶標 C′的 單張圖像,可以計算出兩靶標相對于相機坐標系OCXCYCZC的旋轉矩陣和平移向量

▲圖5 管片定位靶標圖像
測量靶標A、靶標C′時,可以獲得靶標A、靶標C′物體坐標系和相機坐標系的變換關系:
通過小測試提升學生對課程內容持續關注度,測試可以采用線上線下兩種方式進行。在職教云平臺上發布小測試、提問及頭腦風暴等互動活動,評價采用分組互評、學生互評、教師參評等方式進行。這個環節著重對學生自主學習能力進行培養。由于課堂教學時間的限制,可以采用簽到功能逐步引導學生進行持續學習。


從而可以得到靶標A位姿與靶標C′位姿的關系:

式中:TC為相機坐標系OC-XCYCZC下靶標A轉換到靶標 C′的位移矩陣,
相機剛性安裝在舉重鉗上,當初始回轉β角后,可通過幾何關系計算相機坐標系OC-XCYCZC相對于世界坐標系OW-XWYWZW的齊次變換矩陣,進而可通過TC計算出世界坐標系下靶標A到靶標C′的位移矩陣T=[txtytz]T,即:

精確回轉角φ與管片軸向位移無關,靶標A和靶標C′分布在兩環管片上,因此精確回轉角φ只與tx、ty有關,與tz無關。綜合以上分析,解算管片精確回轉角φ的計算式為:

式中:r為管片半徑。
3.3 舉升機構舉升距離解算原理
激光測距裝置剛性安裝在舉升油缸套筒上,通過回轉機構中心線,隨回轉機構在空間中回轉,其與舉重鉗的距離d為固定值。測量得到的距離L為當前回轉角度下裝置到前一環管片的徑向距離。在預安裝管片完成定位后,需由舉升油缸帶動預安裝管片沿徑向運動距離D,將其安裝至與上一環管片等高處,存在關系式D=L-d,已知d為固定值,則可求得油缸舉升距離D。
4 管片姿態調整
為了避免管片姿態偏移造成管片安裝位置精度不足,保證管片拼裝精度,在拼裝前需先對管片姿態進行調整,再以指定姿態進入拼裝位置,并與前一環管片的螺栓孔對齊。姿態調整運動是盾構機管片繞X、Y、Z三個坐標軸橫搖、俯仰、偏轉三個自由度的聯合運動。因此,基于圖像識別的姿態調整傳感檢測子系統通過測量實際姿態下靶標的圖像,得到管片當前狀態下的姿態角,以及相對于標準姿態角的差值,然后由系統控制相應油缸聯動,實現管片的姿態調整。
管片姿態調整子系統以三自由度并聯機構為原型,三自由度并聯機構及其俯視圖如圖6所示,B為舉重鉗的靜平臺,m為管片抓取機構的動平臺,分別構成上下兩等邊三角形△B1B2B3和△b1b2b3。三角形頂點之間由可伸縮支撐桿連接,每個分支上球副和移動副按照S-P-S的形式串聯,形成的三個分支與平臺B、m通過S副鉸接。O點為S副,形成構型中央約束分支,此約束分支與兩平臺在中心處固定連接。

▲圖6 三自由度并聯機構
管片在姿態調整過程中只發生三個自由度旋轉,定義為偏轉角φ、俯仰角θ、橫搖角ψ。視動平臺坐標系{m}為管片物體坐標系,靜平臺坐標系{B}為固定參考坐標系,則靜平臺通過三次獨立旋轉到達固定平臺,旋轉矩陣mRB為:

式中:RZ(φ)為繞 Z 軸調整偏轉角的旋轉矩陣;RY(θ)為繞Y軸調整俯仰角的旋轉矩陣;RX(ψ)為繞X軸調整橫搖角的旋轉矩陣;c代表cos;s代表sin。
由此解算得到管片的旋轉姿態角,進而計算出相應油缸的位移變化量,通過控制油缸伸縮使管片姿態調整至設定的正確姿態。
5 試驗驗證
5.1 試驗方案
用筆者設計的傳感檢測系統進行模擬試驗驗證,試驗采用Halcon視覺測量軟件作為測量工具,測量用靶標尺寸為130 mm×130 mm,共含25個特征圓,其中4個大圓直徑為25 mm,其余小圓直徑為18 mm。圖像采集設備選用MV-1300UM工業相機,其鏡頭焦距為8 mm,最高分辨率為1 280像素×1 024像素,采用通用串行總線進行通信。光源選用波長850 nm的829IR型紅外光源,發散角為60°。傳感檢測系統模擬試驗布置如圖7所示。
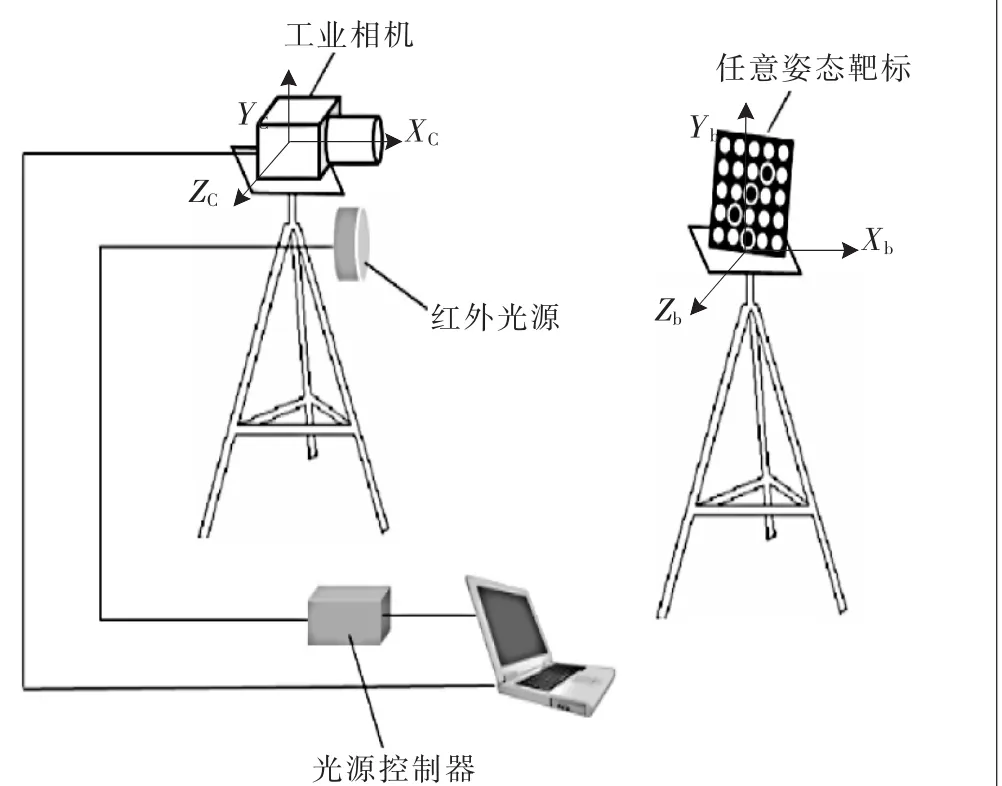
▲圖7 傳感檢測系統模擬試驗布置
工業相機由三腳架固定于特定位置,靶標置于距相機約900 mm處的另一帶有平移和旋轉機構的三腳架上。試驗中,靶標沿坐標系軸作單自由度平移運動,可模擬實際施工中管片定位時靶標的平移;靶標繞坐標系軸作三個自由度內的獨立轉動,可模擬實際施工時管片相對正確姿態發生的微小偏轉。
5.2 試驗結論
在管片定位檢測子系統驗證試驗中,鎖緊靶標三腳架三個自由度方向的轉動,使平移機構平行于相機坐標系XC軸在空間中作8次行程為100 mm的單向精確平移運動,圖像采集系統分別在每個位移處采集得到8組圖像。對比試驗中得到的靶標相對相機坐標系的單向空間位移值Zi與靶標在每個位移處的實際值Zi′,試驗檢測結果為最大偏差絕對值不超過1.7 mm,平均標準偏差不超過1.1 mm。
在管片姿態調整子系統驗證試驗中,鎖緊靶標三腳架的平移機構和其中兩個自由度方向的回轉運動,令靶標繞靶標坐標系Xb軸在一定范圍內任意偏轉5個姿態角度,圖像采集系統分別在每個姿態角度下采集得到5組圖像。對比測得的旋轉姿態角ψi與實際姿態角度ψi′,試驗檢測結果為最大偏差絕對值不超過0.9°,平均標準偏差不超過 0.6°。
根據傳感檢測系統對靶標平移和姿態角的測量試驗,確認通過管片定位傳感檢測子系統測量得到精確回轉角和通過管片姿態調整傳感檢測子系統測量得到管片姿態角的方案可行。試驗表明,對比傳統人工目測拼裝,盾構機管片拼裝自動控制傳感檢測系統拼裝精度由厘米級提高到毫米級,同時系統獲取單張圖像中靶標空間位置數據的平均耗時僅為120 ms,有效減少了傳感檢測系統的總耗時。
6 總結
筆者針對現有盾構機管片拼裝施工中存在的不足,設計了一套基于圖像識別技術的盾構機管片拼裝自動控制傳感檢測系統,對管片空間位置和姿態角進行檢測。模擬試驗表明,這一系統測量精度和測量速率都優于人工拼裝,精度提高了一個數量級,速度提高5~6倍。此外,這一系統還具有設計簡單、非接觸性測量等優點,為今后管片拼裝過程自動化控制的實現提供了理論依據。
[1] 張碧,趙海峰,楊濤,等.盾構管片拼裝機國內外研究現狀[J].礦山機械,2014,42(4):1-6.
[2] 管會生,黃松和,徐濟平.盾構管片拼裝機設計研究[J].礦山機械,2005,33(3):15-16.
[3] 聶明濤.談盾構管片拼裝機的性能優化[J].山西建筑,2013,39(1):207-209.
[4] 王國強,張玉新,趙凱軍,等.盾構掘進機的管片智能拼裝系統:201020540755.8[P].2011-05-04.
[5] 顧冰芳,龔烈航.制造過程質量自動控制系統的研究[J].機械制造,2003,41(8):51-52.
[6] 馬國松.基于單目視覺的位姿測量方法及仿真系統研究[D].哈爾濱:哈爾濱工業大學,2005.
[7] 錢曉剛.盾構掘進設備中的管片拼裝機機構設計方法[D].上海:上海交通大學,2008.
[8] 張廣軍.機器視覺[M].北京:科學出版社,2005.
[9] WU C, LIU X J, WANG L P, et al.Dimension Optimization of an Orientation Fine-tuning Manipulator for Segment Assembly Robots in Shield Tunneling Machines[J].Automation in Construction,2011,20(4):353-359.
[10] WANG L T,GONG G F,SHI H,et al.Positioning Precision and Impact Force Control of Segment Erector for Shield Tunneling Machine [C].Digital Manufacturing and Automation (ICDMA),2012 Third International Conference on,Guilin,2012.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
