兩電平逆變器長時域有限控制集模型預測控制
2018-04-17 08:42:39劉為杰洪興福丁家寶
自動化儀表 2018年4期
劉為杰,尹 疆,洪興福,丁家寶
(中國空氣動力研究與發展中心,四川 綿陽 621000)
0 引言
對于長時域有限控制集模型預測控制(long horizon finite control set model predictive control,LHFCS-MPC)而言,適當增加預測時域,可以獲得更好的控制性能[1]。LHFCS-MPC的控制變量是離散的,因此屬于組合優化問題。若采用窮舉法來實現LHFCS-MPC,其計算量將隨著預測時域的增加呈指數增長[2]。以兩電平逆變器的LHFCS-MPC算法為例,當預測時域為N時,在每個采樣周期內需要進行8N次代價函數的計算比較,計算量十分龐大,很難運用到高采樣率系統中。
近年來,國內外有許多學者致力于減少LHFCS-MPC算法計算量的研究。Bemporad等在2002年提出了顯式模型預測控制(explicit model predictive control,EMPC)。其主要思想是通過參數規劃,將復雜的在線計算轉化為離線計算,大大降低了在線計算時間[3]。隨后,一些學者將EMPC技術成功運用到電力電子領域。Mariethoz S等人將MPC成功運用到脈寬調制(pulse width modulation,PWM)變流器和異步電機拖動系統中[4]。國內的張聚教授[5]系統地闡述了EMPC原理以及在電力電子領域中的多種運用實例。EMPC將大部分在線計算轉化為離線計算,但隨著預測時域的增加以及問題規模的擴大,狀態空間分區也會急劇增加,對存儲空間和在線查找時間提出了十分嚴峻的考驗[6-7]。因此,EMPC更適用于小規模問題。另一部分學者則關注如何降低在線計算時間[8]。通過求解無約束二次線性規劃問題,將長時域模型預測控制運用到電力電子領域。但這類方法需要增加脈寬調制器。文獻[9]考慮變流器最優開關狀態和次優開關狀態,設計了一種預測步數為2的有限控制集模型預測控制(finite control set model predictive control,FCS-MPC)算法。但該方法很難推廣到預測步數大于2的系統中。Tobias Geyer[10]提出了一種基于球形譯碼算法的LHFCS-MPC算法,但采用遞歸的方法執行效率較低,并且在初始時刻或動態時存在因球形譯碼算法初始半徑偏大而計算量過大的問題。
本文將球形譯碼算法和回溯算法運用到LHFCS-MPC的滾動優化中,降低了算法的計算量。運用該算法,對兩電平逆變器進行電流跟蹤控制。在Matlab/Simulink平臺上,搭建了兩電平逆變器LHFCS-MPC控制系統仿真模型,對本文所提出算法的有效性進行仿真驗證,并分析了控制系統的動靜態性能。
1 兩電平逆變器LHFCS-MPC
1.1 預測模型
兩電平逆變器主電路拓撲結構如圖1所示。圖1中:Udc為直流電壓;Sa、Sb和Sc為三個橋臂的開關狀態(取值1或者0);L、R為等效負載,ia、ib、ic為交流側電流。
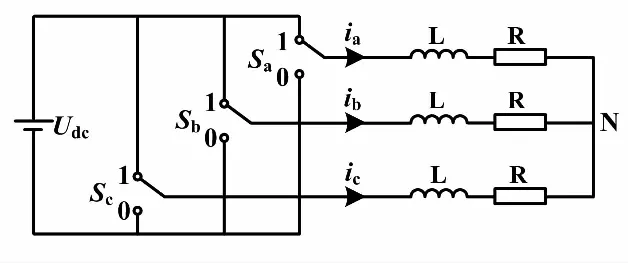
圖1 兩電平逆變器拓撲結構圖Fig.1 The topological structure of two-level inverter
為了便于計算,定義向量:
i=[iα,iβ]T
(1)
u=[Sa,Sb,Sc]T
(2)
則在αβ坐標系下,逆變器的數學模型可表示為:
(3)
式中:A、B為系數矩陣。
式中:P為Clarke變換矩陣。
將式(3)離散化,得:
i(k+1)=A1i(k)+B1u(k)
(4)
式中:A1=eATs,Ts為采樣周期;B1=-A-1(I-A1)B,I為二階單位矩陣。
式(4)即為逆變器的電流預測模型,用于預測下一時刻的電流值。
1.2 代價函數
當預測時域為N時,LHFCS-MPC的代價函數可以表示為[11]:

(5)
式中:λu>0,為權重系數。
式(5)中含有多個狀態變量和輸入變量。為了便于分析,定義向量:
(6)
則有:
I(k)=Ci(k)+DU(k)
(7)
式中:C、D為系數矩陣。
將式(6)和式(7)代入式(5),并整理得:
J=[U(k)+G-1R(k)]TG[U(k)+G-1R(k)]+c(k)
(8)
式中:
由此可以看出,c(k)與開關序列U(k)無關。而當系統參數確定后,矩陣G無需實時計算。當λu>0時,矩陣G為正定矩陣,則G-1也為正定矩陣。對G-1進行Cholesky分解,得:
G-1=LLT
(9)
則有:
G=L-TL-1
(10)
式中:L為下三角矩陣。
將式(10)代入式(8),且令H=L-1、Uunc=-LT×R(k),得:J=[HU(k)-Uunc(k)]T[HU(k)-Uunc(k)]+c(k)
(11)
在每個采樣周期內,根據兩電平LHFCS-MPC算法選擇出開關序列U(k),使得代價函數J最小。而c(k)與U(k)無關,因此代價函數可以簡化為:
J1=[HU(k)-Uunc(k)]T[HU(k)-Uunc(k)]
(12)
1.3 滾動優化
根據式(6)可知,U(k)共有3N個元素,每個元素取值1或者0。因此,U(k)總共有23N個可能取值。在此,不妨令U(k)的所有可能取值構成集合C。LHFCS-MPC算法在每個采樣周期內,計算出使代價函數J1取值最小的的開關序列Uopt(k)。Uopt(k)即為最優開關序列。然后,將Uopt(k)的前3個元素,即uopt(k)作用于逆變器。這個過程即為滾動優化。
傳統的LHFCS-MPC算法遍歷集合C,將其中的每個元素均代入式(12)進行計算,經過比較后可得Uopt(k)。當預測時域N較大時,算法的計算量十分龐大。如當N=5時,需要計算32 768次代價函數。因此,當采樣周期很小時,計算機無法在一個采樣周期內完成一次完整計算。
以下將通過球形譯碼算法結合回溯算法,降低LHFCS-MPC算法的計算量。
1.3.1球形譯碼算法
球形譯碼算法的基本思想是:只搜索位于一個半徑為r(k)的超球內的樣本點[12]。參考球形譯碼算法的思路,設置初始半徑為r(k),按照式(13)搜尋Uopt(k):
J1≤r(k)
(13)
因為式(12)中的H是下三角矩陣,因此,可以利用這一特性來減少計算量。將J1展開,得:[H(1,1)U(k)(1)-Uunc(k)(1)]2+[H(2,1)U(k)(1)+
H(2,2)U(k)(2)-Uunc(k)(2)]2+…+H(3N,3N)×
U(k)(3N)-Uunc(3N)(3N)2≤r(k)
(14)
在計算過程中,如式(14)左邊部分的和大于r(k),則無需再往下進行計算。求和計算越往后,計算量越大。如果一旦發現不符合條件的開關序列就終止計算,將有效減少計算量。初始半徑r(k)可以按照式(15)確定。
(15)
1.3.2回溯算法
LHFCS-MPC的滾動優化實際上屬于組合優化問題。對于組合優化問題,使用回溯算法,可在一定程度上降低計算量。本文開關序列U(k)需要滿足相電壓和線電壓跳變限制條件。為了便于計算,先不考慮開關跳變約束,選擇子集樹作為開關序列解空間樹,如圖2所示。
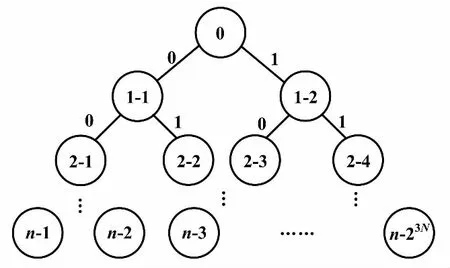
圖2 開關序列解空間樹Fig.2 The solution space tree of the switching sequence
回溯算法按照深度優先策略,搜索解空間樹的節點。在搜索節點時,使用剪枝函數來避免無效的搜索。剪枝函數包括約束函數和限界函數。逆變器開關切換時,必須滿足相電壓和線電壓跳變限制條件(即相電壓和線電壓每次變化不能超過一個電平)。因此,可以將電壓跳變限制條件作為約束函數,如式(16)所示:
(16)
由式(14)可知,限界函數根據球形譯碼算法獲得。值得注意的是,當回溯算法搜索到一個可行解時,更新球形譯碼半徑,以逐漸逼近最優解。
回溯算法有遞歸和迭代兩種實現方式。遞歸方式雖然代碼簡潔,但是執行效率不高;而迭代方式的特點與遞歸相反[13]。本文采用迭代式的回溯算法來實現球形譯碼算法,相應的偽代碼如下:
while(k>=1)
if (k==1)d=0;
end
for (eachu∈{ 0, 1})
if(umeets the switching constraints)
U(k)=u;
d1= (Uunc(k)-H(k,1:k)*U(1:k))2+d;
Record(k)=d1;
if (d1<=r)
if(k==3N)r=d1;Uopt=U;
elsek=k+1;d=d1;
end
end
end
end
k=k-1;
if (k>=2)d=Record(k-1);
end
end
以上算法中,最耗時的步驟是計算H(k,1∶k)*U(1∶k)。得益于式(14),d1可以通過累加的形式進行計算,避免了重復計算。此外,程序還用數組Record記錄每步d1的值。當算法回溯到上層節點時,無需再重新計算d1,進一步降低了計算量。
2 初始和動態時降低算法計算量
球形譯碼算法的關鍵是初始半徑r(k)的選擇。r(k)太小,會導致算法搜索不到解;r(k)太大,則擴大了搜索范圍,將導致算法的計算量顯著增加。按照式(15)計算r(k):在穩態時,r(k)的取值是較為合適的;但是在初始時刻或者參考電流突變時,r(k)的取值明顯增大,算法的計算量也隨之增加。在實際應用中,必須保證算法的計算量在每個采樣周期內都維持在較低的水平。
針對上述問題,本文給出了相應的解決辦法,具體描述如下。令m為穩態時初始半徑最大值,在程序中進行判斷。如果r(k)>kim(ki為一個裕量系數),按照預測時域N=1的情況來搜索最優開關序列;如果r(k)≤kim,則程序正常執行。這樣既可在初始時刻和動態時,使得算法的計算量維持在較低的水平,又不會影響穩態時的控制性能。
3 仿真結果與分析
在Matlab/Simulink平臺上,建立兩電平逆變器LHFCS-MPC控制系統仿真模型,如圖3所示。
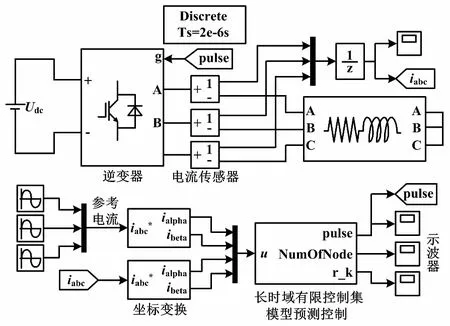
圖3 仿真模型Fig.3 Simulation model
對算法的計算量以及控制性能進行仿真分析。兩電平逆變器參數如表1所示。
表1 兩電平逆變器參數Tab.1 Parameters of the two-level inverter
3.1 算法的計算量
設仿真條件如下:預測時域N=5,λu=0.01,參考電流幅值為21 A,頻率為50 Hz;當t=0.105 s時,令參考電流反向。記錄每個采樣周期內球形譯碼算法的初始半徑r(k),如圖4所示。從圖4中可以看出,穩態時,初始半徑的取值較小。
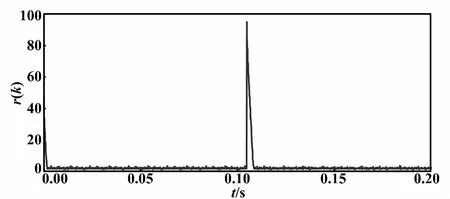
圖4 算法初始半徑變化曲線Fig.4 Initial radius variation curve of the algorithm
需要說明的是,本設計以算法在每個采樣周期內搜索到的開關序列解空間樹中的節點數量,來表征算法計算量。節點數量越大,則計算量越大。算法改進前后的計算量對比圖如圖5所示。
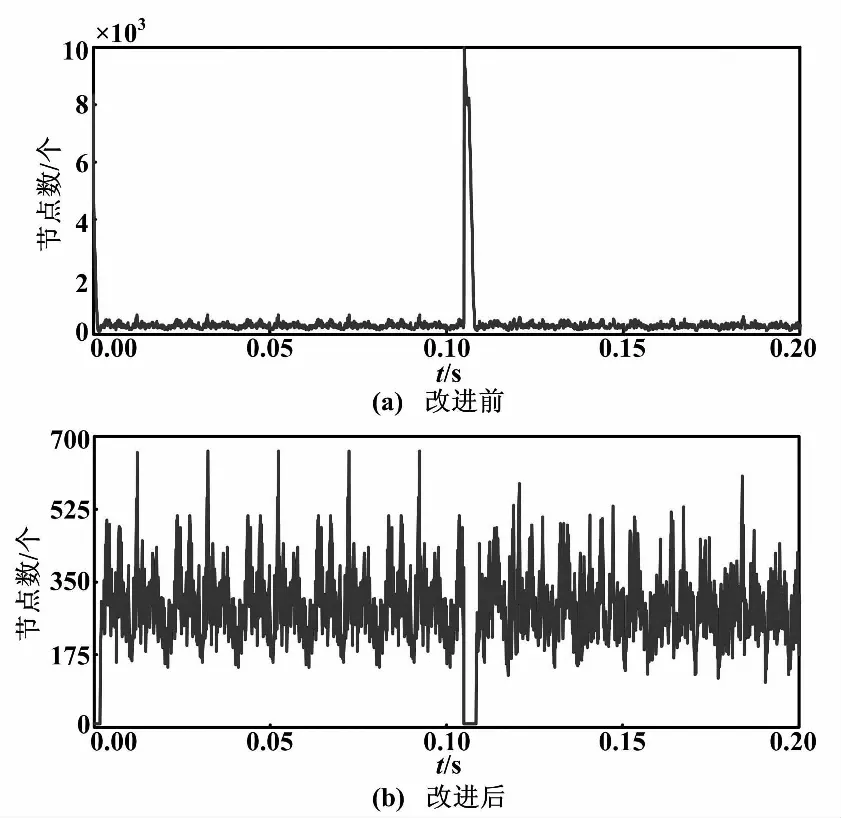
圖5 算法的計算量對比圖Fig.5 Comparison of the calculation amount
初始時刻以及動態時,初始半徑突然增大。穩態時,算法的計算量較小,每個采樣周期大概只需搜索700個節點;而初始時刻以及動態時,每個采樣周期需要搜索上萬節點,如圖5(a)所示。采用本文方法,在初始時刻以及動態時,如果球形譯碼算法初始半徑過大,則令預測時域N=1,并且以相應的算法搜索最優開關序列。穩態時,仍然使用N=5對應的算法。此時,每個采樣周期內算法的計算量如圖5(b)所示。可以看到,在整個仿真時段內,算法需要搜索的節點數限制在700以內,有效解決了初始時刻以及動態時算法計算量劇增的問題。
為了進一步分析兩電平逆變器LHFCS-MPC算法的計算量的影響因素,針對不同的預測時域N,在不同的平均開關頻率下(通過調節λu可以改變逆變器的開關率,一般情況下,λu增大,則開關頻率減小),進行了仿真研究。統計每次仿真算法需要搜索節點數目的最大值,LHFCS-MPC算法計算量如表2所示。

表2 LHFCS-MPC算法計算量Tab.2 Calculation amount of LHFCS-MPC algorithm
3.2 控制性能
本節從動態性能和靜態性能這兩個方面,分析兩電平逆變器LHFCS-MPC算法的控制性能。
①動態性能。


圖6 動態電流波形Fig.6 Dynamic current waveforms
圖6(a)為LHFCS-MPC算法在N=1時的電流波形。參考電流反向后,實際電流約在8 ms內重新準確跟蹤到參考電流。圖6(b)為LHFCS-MPC算法在N=5時的電流波形。與圖6(a)對比發現,提高預測時域N不會影響電流的動態響應能力,因此本文方法不會對系統的動態性能產生影響。圖6(c)為采用經典的比例積分(proportional integral,PI)控制及正弦脈寬調制(sinusoidal pulse width modulation,SPWM)調制得到的電流波形。載波頻率(開關頻率)設置為1 777 Hz,與LHFCS-MPC算法平均開關頻率相同,采樣規則為自然采樣。從圖6(c)中可以看出,電流突變后,實際電流大概經過兩個電流周期(約40 ms)后,才能準確地跟蹤到參考電流。由此可見,LHFCS-MPC算法的動態性能明顯優于傳統的PI控制。
②靜態性能。
靜態性能主要指的是穩態時逆變器輸出電流諧波含量。電流諧波含量與開關頻率緊密相關。一般而言,開關頻率越高,則電流諧波含量越低。因此,在評價逆變器不同控制方法的優劣時,應當基于相同的開關頻率。兩電平逆變器6個開關器件的開關頻率會略有差異,可定義逆變器平均開關頻率favg:
(17)
式中:fa1為A相上橋臂功率開關的開關頻率;fa2為A相下橋臂功率開關的開關頻率。B、C相與之類似。電流諧波含量也取三相電流諧波含量的平均值。
對于LHFCS-MPC算法而言,調節λu可以改變開關頻率;對于PI控制而言,調節載波頻率,即可改變開關頻率。記錄每個開關頻率和對應的電諧波含量,仿真結果如圖7所示。圖7中,每個離散的點代表一次仿真結果。利用Matlab cftool曲線擬合工具箱,以平滑樣條擬合方式進行曲線擬合,得到兩電平逆變器分別在LHFCS-MPC和PI控制策略下的電流諧波含量和平均開關頻率的關系曲線。
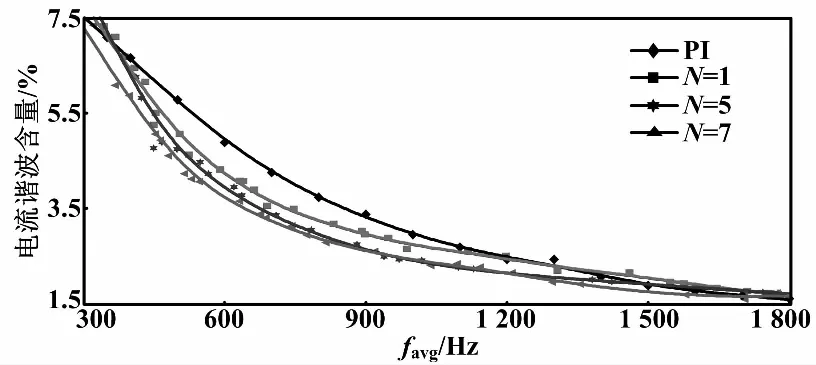
圖7 仿真結果Fig.7 Results of the simulation
從圖7中可以看出,增大預測時域N,可以有效提高LHFCS-MPC算法的靜態性能。其具體表現為:在相同的平均開關頻率條件下,長預測時域對應的電流諧波含量更低。當N=1、400 LHFCS-MPC算法因計算量大而難以運用到逆變器等快速系統中。本文主要采用球形譯碼算法和回溯算法,對傳統LHFCS-MPC算法進行了優化,降低了其計算量,使得該算法在快速系統中的應用成為可能。以兩電平逆變器為研究對象,將LHFCS-MPC算法用于逆變器電流控制,并對算法的有效性和控制性能進行了仿真分析。仿真結果證明,該算法能夠有效降低計算量。該算法在控制性能方面具有以下兩個特點:①增大預測時域能夠顯著降低電流諧波含量,并且不會影響電流的動態響應速度;②兩電平逆變器LHFCS-MPC算法的動態性能和靜態性能均優于傳統的PI控制。對于LHFCS-MPC算法存在的延時問題,后續工作將對其進行延時補償,并對球形譯碼算法進行進一步優化。 參考文獻: [1] GEYER T.A Comparison of control and modulation schemes for medium-voltage drives:emerging predictive control concepts versus PWM-based schemes[J].IEEE Transactions on Industry Applications,2011,47(3):1380-1389.[2] QUEVEDO D,GOODWIN G,DE D J.Finite constraint set receding horizon quadratic control[J].International Journal of Robust and Nonlinear Control,2010,14(4):355-377. [3] BEMPORAD A,MORARI M,DUA V,et al.The explicit linear quadratic regulator for constrained systems[J].Automatica,2002,38(1):3-20. [4] MARIETHOZS,DOMAHIDI A,MORARI M.High-bandwidth explicit model predictive control of electrical drives[J].IEEE Transactions on Industry Applications,2012,48(6):1980-1992. [5] 張聚.顯式模型預測控制理論與應用[M].北京:電子工業出版社,2015. [6] BAYAT F,JOHANSEN T A,JALALI A A.Using hash tables to manage time-storage complexity in point location problem:Application to MPC[J].Automatica,2010,47(3):571-577. [7] GEYER T,TORRISI F D,MORARI M.Optimal complexity reduction of polyhedral piecewise affine systems[J].Automatica,2008,44(7):1728-1740. [8] 王東文,李崇堅,吳堯,等.永磁同步電機的模型預測電流控制器研究[J].電工技術學報,2014(s1):73-79. [9] 沈坤,章兢,王堅.一種多步預測的變流器有限控制集模型預測控制算法[J].中國電機工程學報,2012,32(33):37-44. [10]GEYER T,QUEVEDO D E.Multistep finite control set model predictive control for power electronics[J].IEEE Transactions on Power Electronics,2014,29(12):6836-6846. [11]陳虹.模型預測控制[M].北京:科學出版社,2013. [12]劉俊,魏急波,藍興.MIMO系統中球形譯碼算法的應用[J].現代電子技術,2008(5):49. [13]王曉東.計算機算法設計與分析[M].2版.北京:電子工業出版社,2004.4 結束語