基于STC12C5A32S2同視機(jī)控制系統(tǒng)的設(shè)計
2018-04-17 05:12:21李會杰李俊廷任超越
長春工業(yè)大學(xué)學(xué)報 2018年1期
李會杰, 李俊廷*, 任超越
(1.長春工業(yè)大學(xué) 機(jī)電工程學(xué)院, 吉林 長春 130012;2.長春工業(yè)大學(xué) 電氣與電子工程學(xué)院, 吉林 長春 130012)
0 引 言
同視機(jī)又名大型弱視鏡或斜視鏡,是從Worth弱視鏡演變過來的。同視機(jī)的主要功能是對雙眼功能的檢查,以及與視網(wǎng)膜相對應(yīng)的斜視度數(shù)的測定,按照不同的診斷眼位斜視度變化規(guī)律,分析眼球的運(yùn)動狀況。而且能夠針對患者的病情做相應(yīng)的脫抑制訓(xùn)練、異常視網(wǎng)膜的矯正訓(xùn)練和弱視治療。同視機(jī)是檢查斜視、弱視的基本醫(yī)療設(shè)備,其主要的設(shè)計思想是運(yùn)動結(jié)構(gòu)能夠圍繞眼睛的任意方向做旋轉(zhuǎn)運(yùn)動,其旋轉(zhuǎn)運(yùn)動主要包括圍繞X軸的外展和內(nèi)收運(yùn)動,圍繞Y軸的上、下旋轉(zhuǎn)運(yùn)動,圍繞Z軸的內(nèi)旋和外旋運(yùn)動。
同視機(jī)是集治療與檢測融合為一體的眼科光電儀器。它的主要檢測對象是融像、立體視等雙眼視覺功能和診斷主客異常視網(wǎng)膜對應(yīng)、測量斜視角度、隱斜、后像、弱斜視等眼科疾病,是檢查斜視和弱視檢測必備的醫(yī)療檢測儀器。其主要使用人群是兒童,針對于遠(yuǎn)視性弱視、近視性弱視、屈光不正性弱視等相對應(yīng)的弱視患者。
1 同視機(jī)的總體電路設(shè)計
為了實現(xiàn)同視機(jī)的各項功能,總體結(jié)構(gòu)主要包括單片機(jī)(STC12C5A32S2/AD/PWM)、鍵盤輸入、數(shù)碼管顯示、A/D信號采集、L9110電機(jī)驅(qū)動、TIP142 LED燈驅(qū)動、蜂鳴器、RS232串口通訊和電源八部分,總體電路設(shè)計如圖1所示。
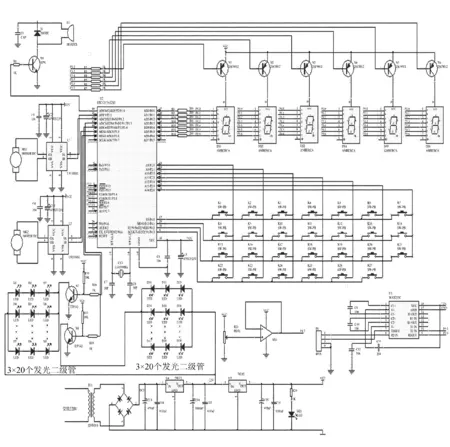
圖1總體電路設(shè)計
2 軟件程序設(shè)計
2.1 主程序的設(shè)計
系統(tǒng)的軟件主要采用C語言,對單片機(jī)進(jìn)行編程實現(xiàn)各項功能。主程序?qū)δK進(jìn)行初始化,而后調(diào)用鍵盤、A/D轉(zhuǎn)換、顯示等模塊,通過控制這些模塊來實現(xiàn)同視機(jī)的各項功能。電路設(shè)計如圖2所示。
2.2 中斷定時子程序
文中的中斷定時是每60 s執(zhí)行一次函數(shù),中斷定時的程序設(shè)定首先設(shè)定初值,由于電路用的外部晶振是11.059 2的標(biāo)準(zhǔn)晶振。在轉(zhuǎn)載初值時是45 872的定時為50 ms。如果想要定時60 s,在每隔600 s就讓F制動加1,也就是12個50 ms,讓該程序執(zhí)行100周期,即F=100就是60 s。
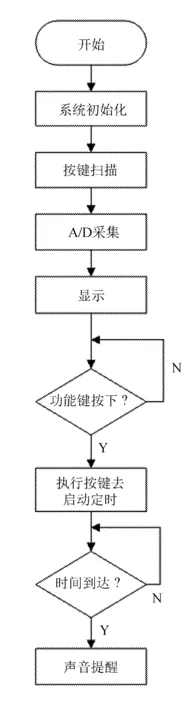
圖2 電路設(shè)計
2.3 鍵盤子程序
先判斷所有按鍵中是否存在按下的按鍵,文中按鍵與單片機(jī)I/O鏈接方式是:采用低電平觸發(fā)方式鏈接(當(dāng)按鍵被按下時I/O的電平變?yōu)榈碗娖?。也就是說,當(dāng)I/O口上的數(shù)據(jù)為0FH時,這就說明了開關(guān)按鍵是沒有被按下的,相反單片機(jī)的I/O口讀到的數(shù)據(jù)并不是0FH,此時按鍵被按下。如果單片機(jī)判定按鍵被按下,就要對按鍵的位置進(jìn)行識別,一般采用掃碼識別。掃碼識別過程如下:在每一列上送高電平,然后檢查所有行的電平狀態(tài),如果全部呈現(xiàn)為高電平,說明該按鍵不在該行中,如果該行中存在低電平,說明按鍵就在該行中,那么行與列的交點就確定了按鍵的位置[2]。
鍵盤程序框圖如圖4所示。
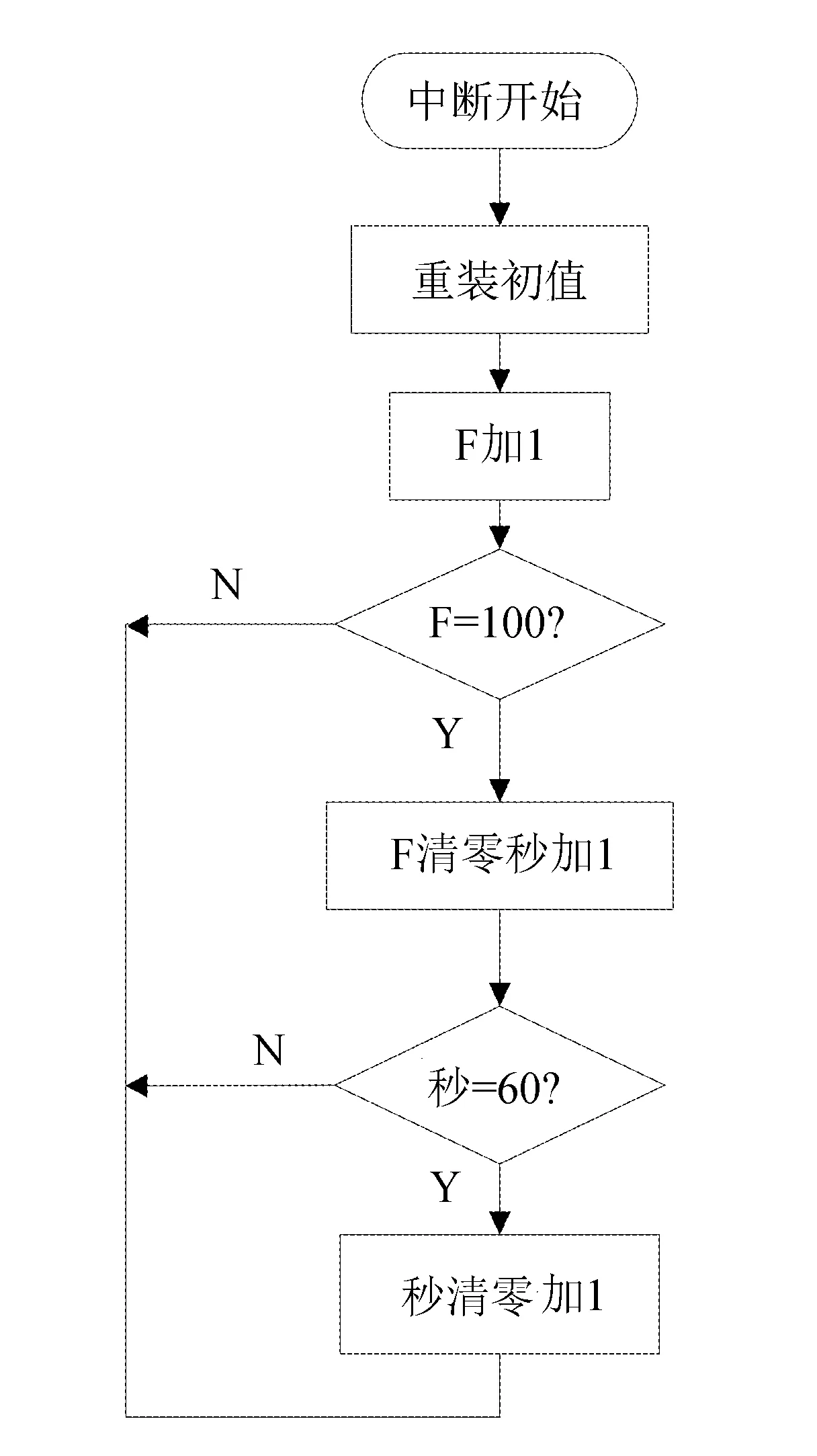
圖3 中斷定時子程序框圖

圖4 鍵盤程序框圖
2.4 顯示子程序
采用數(shù)碼管顯示,采用方式為動態(tài)顯示方式。動態(tài)驅(qū)動原理是將所有數(shù)碼管的8個顯示筆劃“a,b,c,d,e,f,g,dp”的同名端連在一起,并且增加位選和段選,通過控制電路來控制每個數(shù)碼管的COM公共端,位選的控制是通過數(shù)碼管各自的I/O線來控制[3]。當(dāng)單片機(jī)輸出數(shù)碼管的字形編碼時,所有的編碼會同時送到所有的數(shù)碼管的端口上,但最后能顯示出字形的數(shù)碼管要取決于單邊對位選的控制,所以,可以通過位選來控制哪一個數(shù)碼來顯示字形[4]。
通過對LED數(shù)碼管的輪流控制來實現(xiàn)數(shù)碼管的動態(tài)顯示。在對數(shù)碼管的控制中,要事先設(shè)計好每一個數(shù)碼顯示的時間,文中對數(shù)碼顯示的時間設(shè)定為2~3 ms。這樣設(shè)定的原因是人類視覺的暫留現(xiàn)象,以及有著余暉效應(yīng)的二極管,盡管沒有同時點亮,只要掃描時間在一定的范圍內(nèi),對于人眼是能夠同時看見數(shù)碼同時顯示,在實驗長時間的顯示過程中也不會出現(xiàn)波動[5]。
顯示程序框圖如圖5所示。
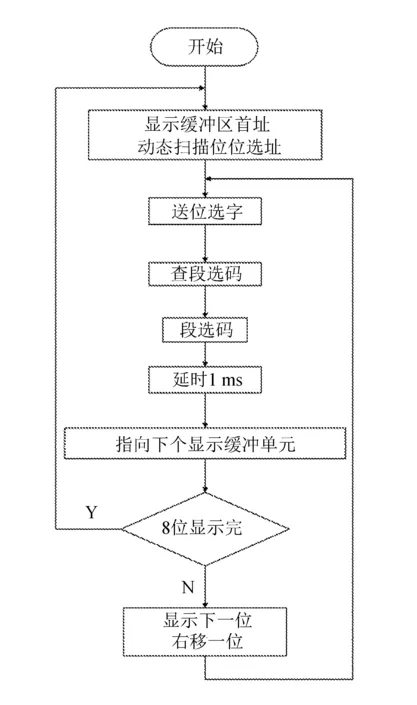
圖5 顯示程序框圖
2.5 A/D數(shù)據(jù)轉(zhuǎn)換子程序
STC12C5A32S2系列單片機(jī)本身含有ADC模塊,所以不需要外部設(shè)計A/D和D/A轉(zhuǎn)換器。該芯片的ADC是從高位到低位的順序與單片機(jī)固定的數(shù)值進(jìn)行比較,使數(shù)字在該D/A轉(zhuǎn)換器最小誤差范圍內(nèi)趨近于實際模擬值。對于文中使用的A/D轉(zhuǎn)換器,具有速度高和低功耗的特點[6]。A/D轉(zhuǎn)換器的工作原理是使用實驗得到的模擬量與進(jìn)行A/D轉(zhuǎn)換的寄存器所設(shè)定的固定的數(shù)字量進(jìn)行比較,最后將每一次比較的結(jié)果存儲起來,并且由逐次比較器輸出結(jié)果。ADC_RES和ADC_RESL分別儲存A/D和D/A轉(zhuǎn)換的數(shù)據(jù)結(jié)果,對于ADC 控制是由ADC_CONTR完成的。單片機(jī)中的A/D轉(zhuǎn)換結(jié)束標(biāo)志位ADC_FLA是程序發(fā)送中斷請求和滿足程序查詢的一個設(shè)定值。ADC_CONTR中的CHS2_HS0控制寄存器控制著模擬通道的選擇。SPEED1和SPEED0寄存器是用來控制ADC轉(zhuǎn)換的速率。ADC控制寄存器中的ADC_POWER位控制是否上電位。
2.6 PWM應(yīng)用子程序
本設(shè)計是通過單片機(jī)I/O口的輸出來實現(xiàn)PWM波,通過控制單片機(jī)的輸出頻率能夠?qū)崿F(xiàn)PWM波的頻率變換。在確定PWM波的頻率為500 Hz的情況下,單片機(jī)可以控制PWM的占空比,從而實現(xiàn)單片機(jī)對直流電機(jī)轉(zhuǎn)動速度的控制。通過PWM脈沖的占空比的改變就能隨意控制大小。以固定的時間T,通過改變大小的方法,從而實現(xiàn)對占空比的調(diào)節(jié)。文中采用STC12C5A32S2單片機(jī)為控制核心,該芯片采用T0定時計數(shù)器的工作模式中的模式2是使用8位自動從裝工作方式。在程序初始化時,TL0和TH0被裝載相同的數(shù)值[7]。當(dāng)TL0計數(shù)溢出時,硬件就自動將TH0中的初值裝入TL0中,從而實現(xiàn)自動循環(huán)。這里的定時時間t是通過如下計算得到的
t=(28-T0初值)×Tosc×12
(1)
式中:Tosc----振蕩周期。
把酒臨風(fēng):科技創(chuàng)新不是一個急功近利的問題,在中國你成功之后別人可能會抄襲,但在法治國家不行,你抄襲就重罰你,誰都不能隨便侵犯他人,如果真做到這一點,我們的科技創(chuàng)新就能產(chǎn)出更多成果。也就是說完善的財產(chǎn)保護(hù)制度,才能讓大家看到技術(shù)創(chuàng)新暴富的可能性。
(2)
按照式(2)可以計算得到定時器最小的定時時間。設(shè)晶振頻率為12 MHz。
3 結(jié) 語
基于STC12C5A32S2單片機(jī)為微處理器設(shè)計同視機(jī)的各個控制系統(tǒng)的電路能夠穩(wěn)定地控制同視機(jī),實現(xiàn)圍繞三個軸做各種方向旋轉(zhuǎn)運(yùn)動的鏡筒,鏡筒做各個方向的旋轉(zhuǎn)運(yùn)動都是圍繞著眼球旋轉(zhuǎn)中心的位置進(jìn)行控制,實現(xiàn)同視機(jī)的各種功能。
經(jīng)過臨床使用證明,基于STC12C5A32S2單片機(jī)為微處理器設(shè)計同視機(jī)的各個控制系統(tǒng)工作穩(wěn)定,性能優(yōu)于同類產(chǎn)品。
參考文獻(xiàn):
[1]李明星.直流穩(wěn)壓電源的設(shè)計與制作[J].吉林工程技術(shù)師范學(xué)院學(xué)報,2006,11:22-25.
[2]王質(zhì)樸,呂運(yùn)鵬.MCS-51單片機(jī)原理接口及應(yīng)用[M].北京:北京理工大學(xué)出版社,2015.
[3]胡漢才.單片機(jī)原理及其接口技術(shù)[M].4版.北京:清華大學(xué)出版社,2015:266-268.
[4]王瓊.單片機(jī)原理及應(yīng)用[M].合肥:合肥工業(yè)大學(xué)出版社,20016.
[5]周明月,徐東力.認(rèn)知無線電網(wǎng)絡(luò)遠(yuǎn)程醫(yī)療監(jiān)護(hù)系統(tǒng)[J].長春工業(yè)大學(xué)學(xué)報,2017,38(4):328-334.
[6]王紀(jì)強(qiáng),張春熹.基于大功率led的弱視治療儀光源系統(tǒng)[J].研究與開發(fā),2010(10):50-52.
[7]程方曉,王海彪,劉璐.小型無人機(jī)飛行姿態(tài)串級控制系統(tǒng)[J].長春工業(yè)大學(xué)學(xué)報,2017,38(5):453-458.
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:48:04
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:27