PI參數(shù)自整定模糊光伏并網(wǎng)控制
2018-04-17 05:12:21陳拉拉
長春工業(yè)大學(xué)學(xué)報 2018年1期
陳拉拉, 王 蔚
(長春工業(yè)大學(xué) 電氣與電子工程學(xué)院, 吉林 長春 130012)
0 引 言
受到環(huán)境污染和化石能源有限性的制約,開發(fā)利用新能源逐漸受到世界各國的廣泛關(guān)注[1]。在光伏發(fā)電過程中,逆變控制作為重要的一環(huán),其控制的好壞直接影響發(fā)電的質(zhì)量。常見的控制方式有比例積分(PI)控制、比例諧振(PR)控制、重復(fù)控制和模糊控制等[2-3]。比例積分控制簡單,動態(tài)響應(yīng)迅速,但存在穩(wěn)態(tài)誤差;比例諧振控制在基波頻率處具有高增益,可以減小并網(wǎng)電流穩(wěn)態(tài)誤差;重復(fù)控制可改善系統(tǒng)靜態(tài)特性,缺點是動態(tài)響應(yīng)較差;模糊控制不需要精確的系統(tǒng)模型,適合非線性系統(tǒng)調(diào)節(jié)。當(dāng)電網(wǎng)含有諧波時,傳統(tǒng)PI控制誤差較大,通過將模糊控制和傳統(tǒng)PI控制相結(jié)合,構(gòu)成PI參數(shù)自整定模糊控制器,把采樣誤差送模糊控制器處理,通過對PI參數(shù)實時修改,進一步減小并網(wǎng)電流的誤差。
1 系統(tǒng)原理及dq坐標(biāo)系下解耦
1.1 系統(tǒng)原理
三相逆變光伏并網(wǎng)系統(tǒng)控制原理圖如圖1所示。

圖1系統(tǒng)控制原理圖
圖中,濾波器為一階L濾波,輸出接本地負載和電網(wǎng)。通過坐標(biāo)變換,將系統(tǒng)從三相自然坐標(biāo)轉(zhuǎn)換到兩相旋轉(zhuǎn)坐標(biāo),可直接控制逆變器有功和無功電流,采用PI控制即可實現(xiàn)并網(wǎng)電流基波無靜差調(diào)節(jié)[4]。電壓外環(huán)產(chǎn)生有功電流給定值Idref和經(jīng)坐標(biāo)變換采樣的有功電流實際值作差,誤差送PI調(diào)節(jié)器;為實現(xiàn)高功率因數(shù)并網(wǎng),將無功電流給定值Iqref設(shè)為零,同樣和采樣的實際無功電流作差,誤差送PI調(diào)節(jié)器;當(dāng)電網(wǎng)為理想狀態(tài)時,PI調(diào)節(jié)即可達到理想的并網(wǎng)效果,但現(xiàn)實電網(wǎng)多存在擾動,普通PI存在局限性,在本系統(tǒng)中,用PI參數(shù)自整定模糊控制器代替常規(guī)的PI控制器,在PI控制的基礎(chǔ)上,通過模糊控制對比例、積分參數(shù)實時修改,參數(shù)修改后的PI控制器輸出控制量經(jīng)過解耦控制和坐標(biāo)變換,最后經(jīng)SVPWM[5]模塊產(chǎn)生控制信號,經(jīng)驅(qū)動電路送入逆變器,進行并網(wǎng)逆變控制。
1.2 dq坐標(biāo)下解耦
dq坐標(biāo)下三相并網(wǎng)逆變器的數(shù)學(xué)模型為
(1)
由于d軸中存在iq分量,q軸中存在id分量,兩者耦合,這會加大設(shè)計電流調(diào)節(jié)器難度,需要對兩者解耦,把式(1)變?yōu)?
(2)
令:
(3)
將式(3)代入式(2):
(4)
(5)
式中:Δud,Δuq----PI調(diào)節(jié)器d軸和q軸分量的輸出;
τpi----積分時間常數(shù);
可得控制變量ud和uq的控制方程為:
(6)
通過以上推導(dǎo),借助引入電流狀態(tài)反饋,實現(xiàn)dq解耦,方便環(huán)路設(shè)計。
2 PI參數(shù)自整定模糊控制器設(shè)計
傳統(tǒng)PI控制器的比例和積分參數(shù)是固定的,當(dāng)電網(wǎng)擾動較大,其控制誤差偏大。文中所設(shè)計的PI參數(shù)自整定控制器在PI控制的基礎(chǔ)上,通過模糊控制器對比例和積分參數(shù)進行實時修改,從而減小跟蹤誤差,提高并網(wǎng)電流質(zhì)量。
2.1 模糊控制器結(jié)構(gòu)原理設(shè)計
PI參數(shù)自整定模糊控制器如圖2所示。
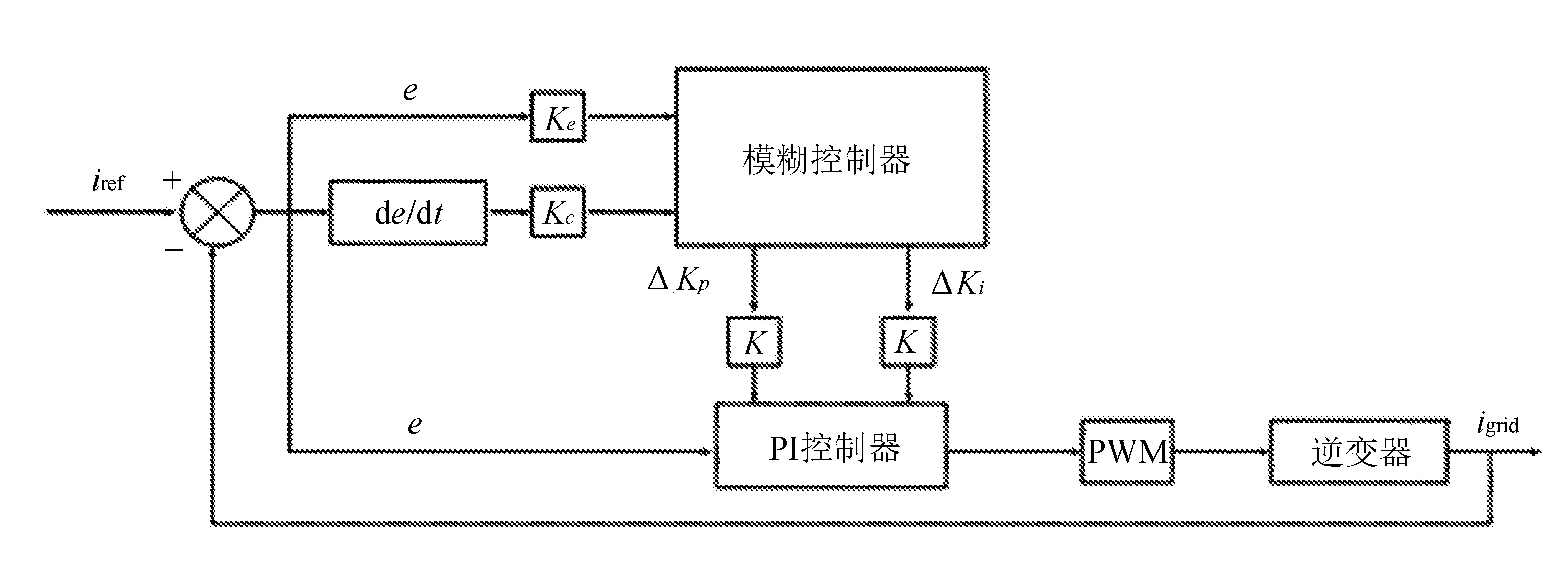
圖2PI參數(shù)自整定模糊控制
PI參數(shù)自整定模糊控制器原理為:采樣獲得并網(wǎng)電流給定值和實際值比較作差,誤差e送PI控制器;誤差變化率de/dt和誤差e分別乘以系數(shù)Kc和Ke送模糊控制器,通過每個采樣周期的采樣數(shù)據(jù),模糊控制器產(chǎn)生比例和積分系數(shù)修正量ΔKp和ΔKi分別乘以系數(shù)K送入PI控制器,進行在線修改[7],一個采樣周期后的Kp值為:
Kp1=Kp0+ΔKp*K
最后,PI控制器輸出信號經(jīng)PWM調(diào)制后通過驅(qū)動電路進行逆變控制。
2.2 模糊控制規(guī)則
模糊控制規(guī)則是模糊控制器的核心,通過對輸入、輸出變量詞集的編輯來決定控制器的控制精度。文中模糊控制器為雙輸入、雙輸出結(jié)構(gòu),即誤差e和誤差變化率de/dt作為輸入,比例系數(shù)修正量ΔKp和積分系數(shù)修正量ΔKi作為輸出。詞集包含7個詞匯:分別是[負大,負中,負小,零,正小,正中,正大],即[NB,NM,NS,ZE,PS,PM,PB],控制器的4個變量都采用這個結(jié)構(gòu)。
確定詞匯集后可進行隸屬度函數(shù)編輯,具體操作在Matlab中的模糊邏輯工具箱實現(xiàn)。文中詞匯集含有7個詞匯,故需要編輯7個隸屬度函數(shù),4個變量的論域均為[-6,6],以其中一個為例,隸屬度函數(shù)見表1。

表1 隸屬度函數(shù)
通過分析PI參數(shù)對系統(tǒng)控制精度的影響,建立誤差e和誤差變化率Δe/Δt對比例系數(shù)修正量ΔKp和積分系數(shù)修正量ΔKi的模糊規(guī)則,見表2。
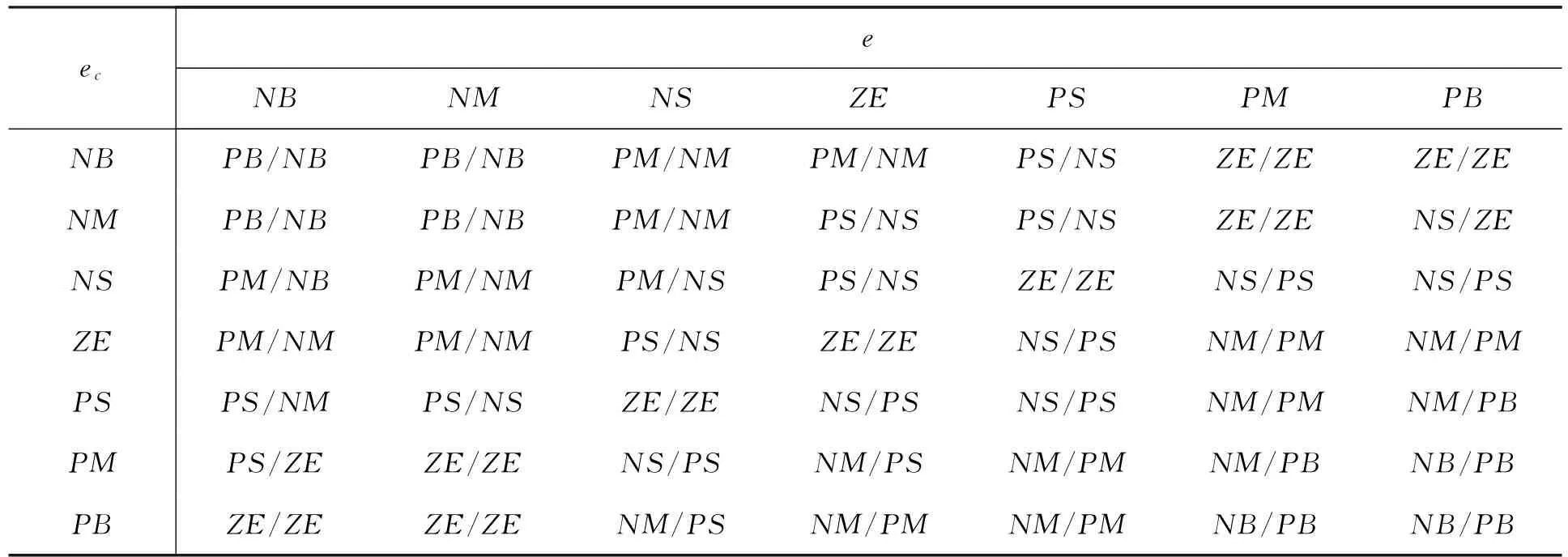
表2 ΔKp和ΔKi模糊控制規(guī)則
以上規(guī)則可在Matlab中的模糊邏輯工具箱中,通過規(guī)則編輯器以If…Then的形式進行模糊規(guī)則編輯。
2.3 解模糊化設(shè)計
解模糊化就是將模糊控制器產(chǎn)生的模糊量轉(zhuǎn)化為參與控制的精確量,文中采用加權(quán)平均法解模糊,具體可在Matlab的模糊邏輯工具箱中選擇需要的方法,算法如下:
3 重復(fù)補償PI控制器
重復(fù)補償PI控制器如圖3所示。

圖3重復(fù)補償PI控制器
由圖3可以看出,送入被控對象的控制量除了誤差e的PI整定量,還疊加了一個上一周期的誤差,通過把上個采樣周期的誤差和當(dāng)前采樣的誤差經(jīng)處理后一起送被控對象,將這種方式叫做重復(fù)控制。其中Q(s)為低通濾波器,一般Q(s)=1/(1+TqS)。
4 仿真驗證
借助Simulink工具箱進行仿真系統(tǒng)搭建,如圖4所示。
由圖4可以看出,通過加入諧波源驗證在電網(wǎng)擾動的情況下,將傳統(tǒng)PI控制、重復(fù)補償PI控制和PI參數(shù)自整定模糊控制三種方法作比較。系統(tǒng)仿真設(shè)置如下,光伏陣列輸出電壓370 V,經(jīng)Boost電路升壓至700 V供逆變橋;濾波電感L=3 mH,R=0.01 Ω;交流側(cè)三相電壓有效值220 V,頻率50 Hz;諧波源設(shè)置為3次諧波電壓幅值30 V,5次諧波電壓幅值25 V;模糊控制器參數(shù)Ke=Kc=3,K=0.1;PI控制器初始值Kp=20,Ki=10;仿真時間設(shè)置為0.3 s;調(diào)制方式為SVPWM[8]。通過仿真分別得出3種控制方式下的并網(wǎng)電流和并網(wǎng)電流諧波分析。
傳統(tǒng)PI控制、重復(fù)補償PI控制和PI參數(shù)自整定模糊控制分別如圖5~圖7所示。
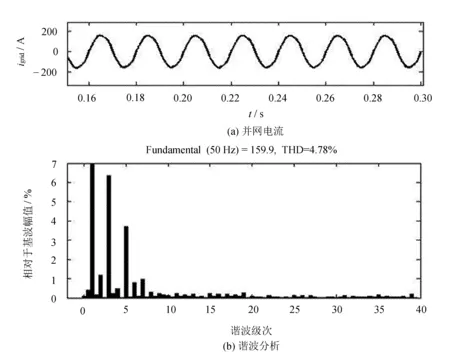
圖5 傳統(tǒng)PI控制

圖6 重復(fù)補償PI控制
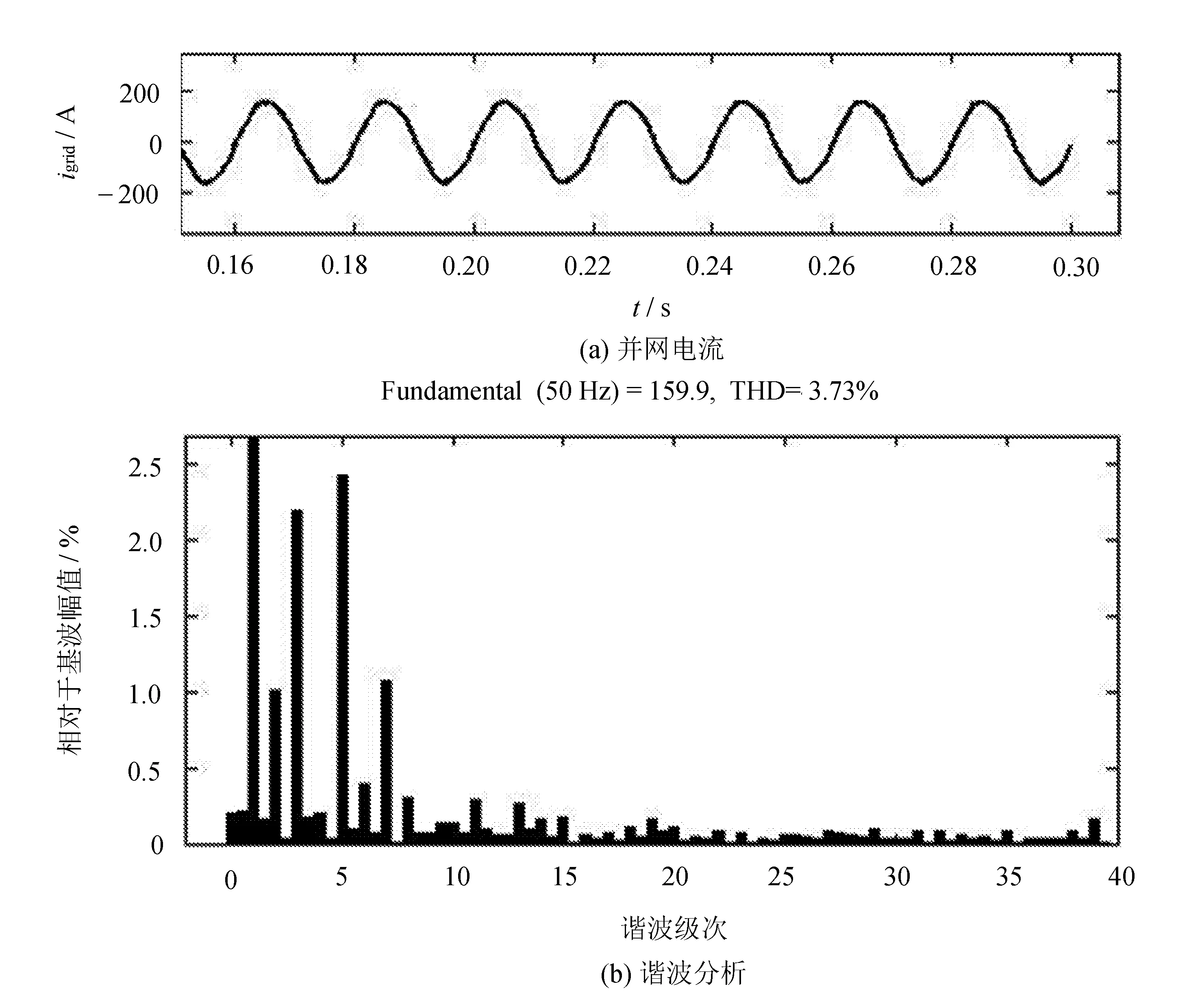
圖7 PI參數(shù)自整定模糊控制
從圖5~圖7可以看出,當(dāng)電網(wǎng)含有諧波時,傳統(tǒng)PI控制、重復(fù)補償PI控制和PI參數(shù)自整定模糊控制電流總諧波畸變率分別為4.78%、4.54%和3.73%,而且傳統(tǒng)PI控制和重復(fù)補償PI控制的3次、5次諧波含量明顯高于PI參數(shù)自整定模糊控制,所以PI參數(shù)自整定模糊控制的整體控制效果要優(yōu)于其他兩種。通過仿真表明,文中所提出的控制策略相比傳統(tǒng)PI控制和重復(fù)補償PI控制在電網(wǎng)擾動情況下具有一定的優(yōu)越性。
5 結(jié) 語
借助Simulink工具箱設(shè)計了PI參數(shù)自整定模糊控制器,當(dāng)電網(wǎng)存在諧波時,對傳統(tǒng)PI控制、重復(fù)補償PI控制和PI參數(shù)自整定模糊控制三種方法進行了對比,仿真結(jié)果表明,當(dāng)電網(wǎng)含有一定3次、5次諧波時,采用PI參數(shù)自整定模糊控制的系統(tǒng),整體控制效果優(yōu)于其他兩種控制方式,驗證了所提控制策略的可行性。
參考文獻:
[1]曾正,趙榮祥,湯勝清,等.可再生能源分散接入用先進并網(wǎng)逆變器研究綜述[J].中國電機工程學(xué)報,2013,33(24):1-12.
[2]滕國飛,肖國春,張志波,等.采用重復(fù)控制的LCL型并網(wǎng)逆變器閉環(huán)電流控制[J].中國電機工程學(xué)報,2013,33(24):13-21.
[3]顧和榮,王德玉,沈虹,等.三相四橋臂逆變器控制技術(shù)研究[J].電力系統(tǒng)保護與控制,2012,39(24):41-46.
[4]阮新波,王學(xué)華.LCL型并網(wǎng)逆變器的控制技術(shù)[M].北京:科學(xué)出版社,2015.
[5]李波,安群濤,孫兵成.空間矢量脈寬調(diào)制的仿真研究及實現(xiàn)[J].電機與控制應(yīng)用,2006,33(6):40-44.
[6]朱曉亮.基于電網(wǎng)電壓定向三相并網(wǎng)逆變器的研究[D].南京:南京航空航天大學(xué),2010.
[7]杜佳妮.基于自適應(yīng)模糊控制的并網(wǎng)逆變器控制策略分析與研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2010.
[8]郁琰.基于SVPWM的交流調(diào)速系統(tǒng)仿真[J].長春工業(yè)大學(xué)學(xué)報:自然科學(xué)版,2012,33(6):667-671.