220 MW機組電動給水泵振動分析與平衡
2018-04-20 06:31:24張海濤薛永鋒宋大勇
東北電力技術 2018年2期
關鍵詞:振動
張海濤,常 強,薛永鋒,宋大勇
(國電科學技術研究院, 江蘇 南京 210046)
1 設備故障情況
某220 MW火電機組配備3臺額定容量為50%的電動給水泵,正常運行時2臺運行,1臺備用。給水泵電機由沈陽電機廠有限公司生產,型號為YK3200-2/1180,額定功率為3 200 kW,額定電壓為6 kV,額定電流為360 A,轉速為2 987 r/min。給水泵采用臥式布置,其中1臺給水泵電機驅動端垂直方向振動最高達98 μm,水平振動為60 μm,軸向振動為75 μm;電機非驅動端垂直振動最高達70 μm,水平方向振動為50 μm,軸向振動為46 μm,超出振動標準,影響設備安全運行,給安全生產帶來隱患。
2 測量儀器與測點布置
振動測試采用南京東振測控技術有限公司生產的EVM-202動平衡振動分析儀。給水泵振動探頭采用磁電式速度傳感器,靈敏度為19.7 mV/mm,共有2個振動探頭,其中給水泵電機非驅動端垂直方向布置1個探頭,給水泵電機驅動端垂直方向布置1個探頭。鍵相傳感器采用光電傳感器,與瓦振探頭布置在1條直線上,振動測點布置見圖1。
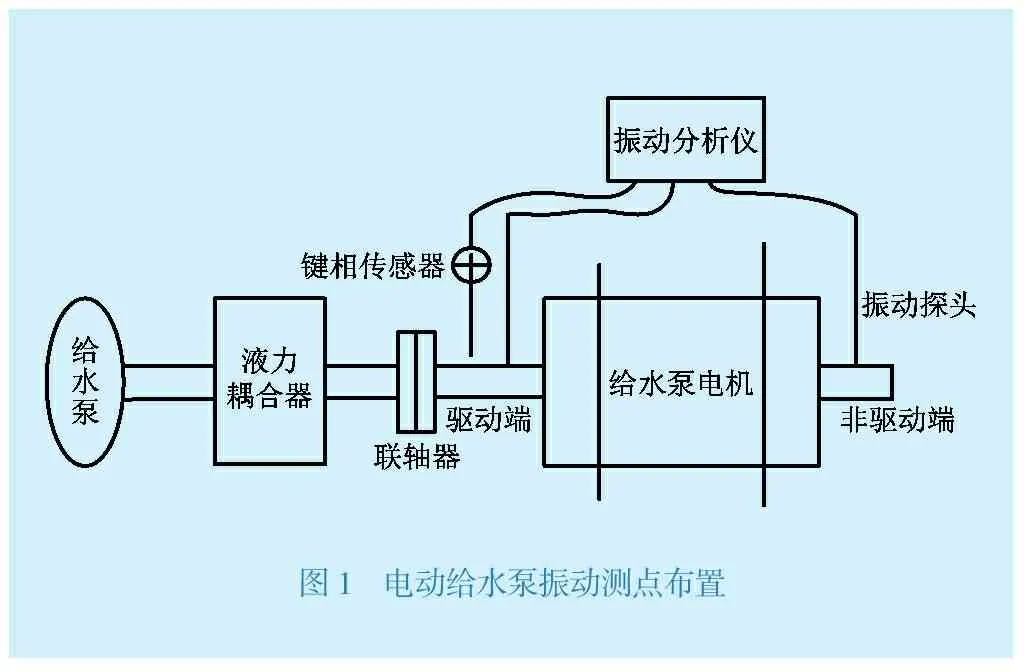
圖1 電動給水泵振動測點布置
3 振動分析與平衡
在布置完電動給水泵振動測點與鍵相傳感器后,啟動電動給水泵,測得給水泵電機原始振動值見表1,表1中為3組不同時刻測得的振動數據,計算時取數據的平均值。
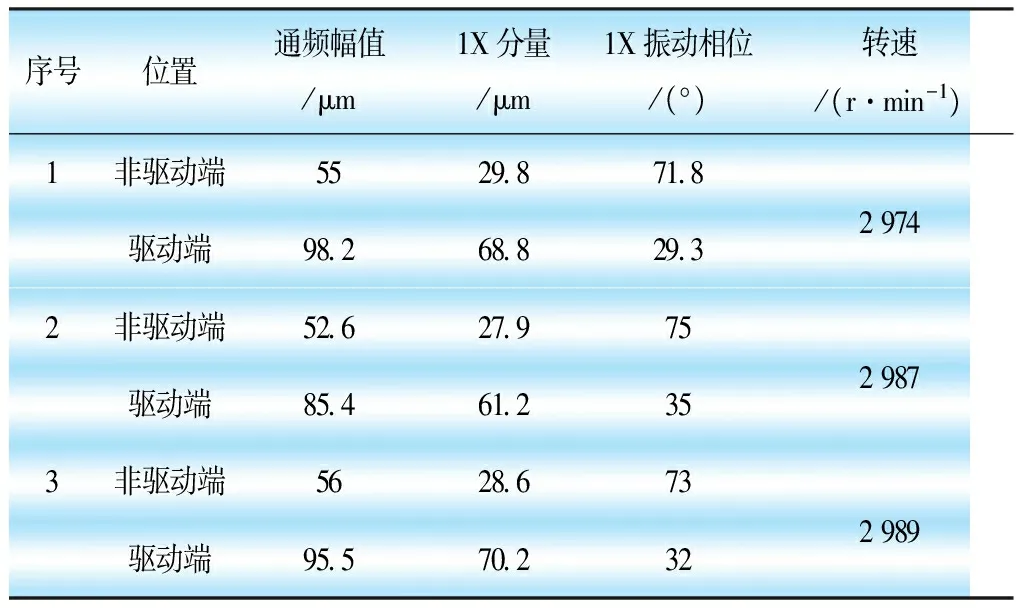
表1 給水泵電機平衡前振動值(p-p)
由表1數據可看出,給水泵電機非驅動端與驅動端電機振動1X分量占通頻幅值主要成分,振動信號隨轉速變化明顯,在固定轉速下工頻振動的幅值和相位都較穩定,因此可判定為典型的不平衡故障,應采用現場動平衡予以消除。
給水泵電機轉子的現場平衡可以采用影響系數法進行平衡加重,首先在不加重情況下啟動給水泵電機到額定轉速,測量各軸承的工頻振動值(振幅和相位)。停機分析振動后選定加重平面,添加試重后啟動給水泵電機,測量各軸承振動值。計算選定平面的影響系數,進行動平衡計算,按照計算結果添加校正配重量,如果選定平面無效,則需要重新選擇加重平面,并重新選擇加重量。添加校正配重后,啟動機組,測量振動,如果各軸承振動值降低到合格范圍,則動平衡工作結束,否則還需再次進行調整[1-4]。
給水泵非驅動端與驅動端的影響系數分別為
(1)
(2)

由此,電動給水泵的平衡方程為
(3)
(4)

由式(3)、(4)可以看出,單平面平衡給水泵電機,一般很難同時滿足,進一步得:
(5)
(6)

(7)
對式(7)展開有:
(8)
對式(8)求導有:
(9)
(10)
第1次加重采用試加重,加重120 g∠273°。啟動電動給水泵,測量振動值見表2,表2中為3組不同時刻測得的振動數據,計算時取數據的平均值。
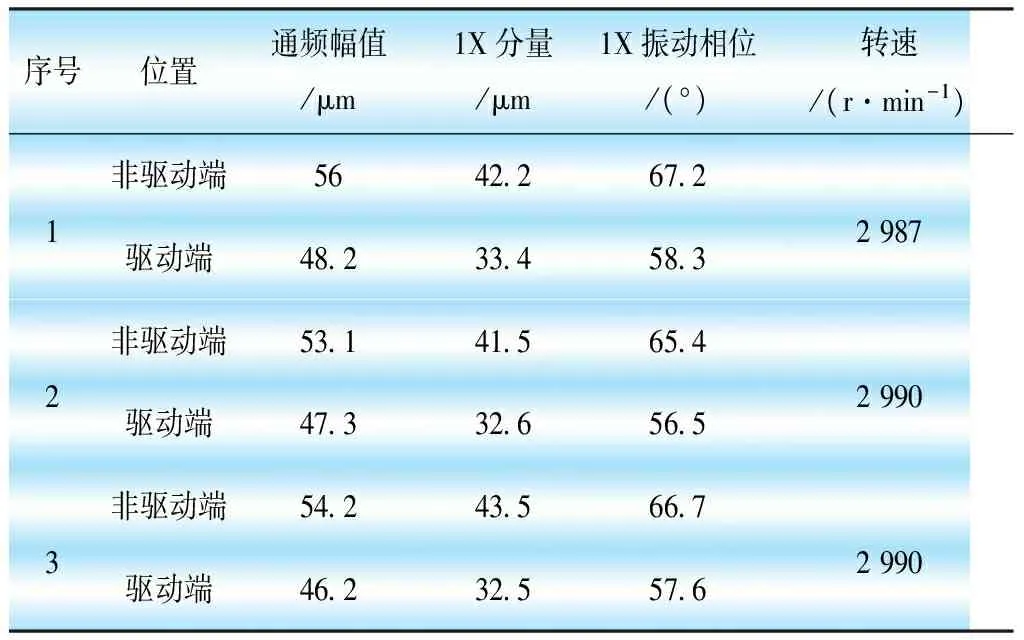
表2 給水泵電機加重120 g振動值(p-p)
由表2可以看出,在加重120 g后,給水泵電機驅動端振動數值明顯減小,振動出現明顯響應,經過優化,在加重120 g基礎上,繼續加重55 g∠229°,再次啟動電動給水泵,測得振動數據見表3,表3中為3組不同時刻測得的振動數據,計算時取其平均值。
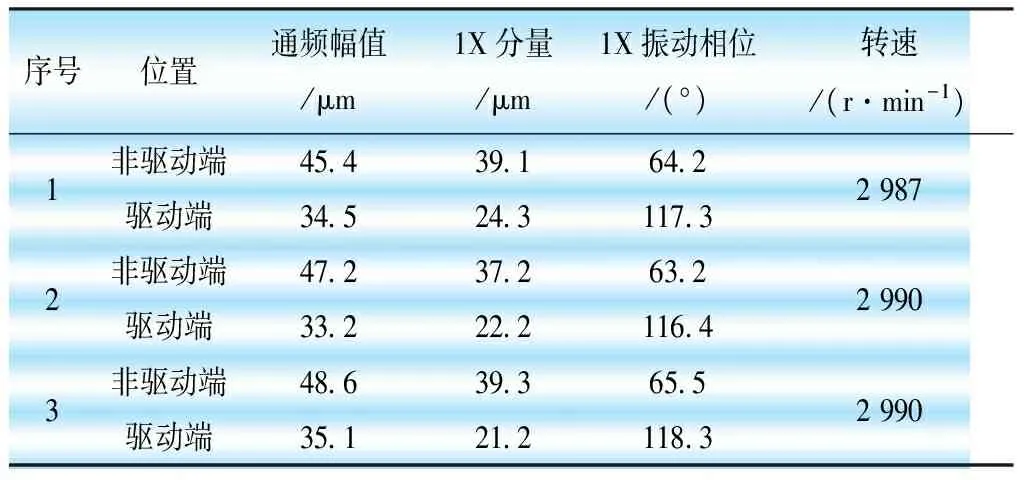
表3 給水泵電機繼續加重55 g振動值(p-p)
由表3可以看出,給水泵經過動平衡后,電機非驅動端與驅動端振動均滿足國家標準,可以長時間運行。
本次動平衡通過在軸上貼反光帶作為相位基準,由于反光帶無法永久保存,對同一臺設備來說,在保持振動傳感器位置與鍵相傳感器位置不變的前提下,加重角度以反光帶為零點,如果兩次測量反光帶的角度不同,前一次的影響系數也可以直接使用,這是因為影響系數的相位取決于振動相位和試加質量的角度,反光帶的角度不同,會使振動相位發生變化,但也使試加質量角度發生變化。經過現場采用手持式振動儀測試,給水泵在不同負荷條件下,振動數據見表4。經過現場動平衡后,給水泵振動數值得到改善,動平衡取得了良好效果。

表4 不同負荷下給水泵電機振動值(p-p)
4 結論
a. 某電廠給水泵電機振動故障原因為轉子質量不平衡。
b. 通過現場動平衡后,電機驅動端垂直方向振動由98 μm降至28 μm,水平方向振動由60 μm降至22 μm,軸向振動由75 μm降至30 μm;電機非驅動端垂直方向振動由70 μm降至45 μm,水平方向振動由50 μm降至42 μm,軸向振動由46 μm降至20 μm,取得了良好效果。
c. 對于電機等轉子,影響系數法可以較好地解決動平衡問題。
d. 對于同一臺設備來說,在保持振動傳感器位置與鍵相傳感器位置不變的前提下,對于采用反光帶確定相位的轉子,在以后的平衡工作中,可以直接采用之前的影響系數進行計算。
參考文獻:
[1]寇勝利.汽輪機發電機組的振動及現場平衡[M].北京:中國電力出版社,2007:181-183.
[2]常強. 200 MW機組發電機轉子現場動平衡試驗研究[J].東北電力技術,2010,31(2):1-3.
[3]俞輝,常強,冷杰. 大型發電機現場動平衡影響系數分析及應用[J].東北電力技術,2011,32(12):11-13.
[4]張海濤,路軍鋒,丁永允. 626 MW亞臨界機組低壓缸轉子振動診斷及處理[J].東北電力技術,2016,37(2):37-40.
[5]張小科,劉明. 300 MW機組凝結水泵振動故障診斷及處理[J]. 電站系統工程,2016,32(6):46-48.
[6]段學友,周菁. 330 MW火電機組立式凝結水泵振動大故障分析處理[J]. 電站系統工程,2013,29(4):48-50.
[7]倪守龍,盧盛陽,張磊,等. 電動給水泵驅動電機振動分析及動平衡處理[J]. 河北電力技術,2013,32(3):43-45.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00
