CPR1000機組電動主給水泵跳泵觸發RB控制優化
2018-04-23 12:09:20劉道光欒振華
自動化儀表 2018年3期
于 航,劉道光,欒振華
(中廣核工程有限公司,廣東 深圳 518124)
0 引言
改進型百萬千瓦級壓水堆(CPR1000)核電站機組在調試啟動階段,需要執行電動主給水泵系統單泵運行觸發汽輪機快速甩負荷(run back,RB)試驗。試驗主要驗證以下兩項內容。在一臺電動主給水泵跳泵,且備用電動主給水泵未聯啟工況下,設滿功率為FP,機組以200%FP/min的速率快速降至50%FP功率平臺的過程中,控制系統將機組主要參數維持在穩定區間的能力。在一臺電動主給水泵檢修工況下,驗證機組運行的最高安全功率水平。
RB試驗過程中,二回路負荷會快速下降,一回路在“堆—機”協調的控制下,通過功率棒調節堆芯功率快速下降,以匹配二回路功率;機組RB信號觸發后,汽機負荷以200%FP/min速率下降。由于突然失去了一臺電動主給水泵供水,主給水流量瞬間大幅下降。蒸汽發生器(steam generater,SG)液位在壓水效應及突然失去主給水的雙重影響下,先迅速下降,再快速上升。若SG液位下降至低液位(-0.9 m)疊加汽/水流量不匹配信號,或者SG液位下降至低低液位(-1.26 m),則觸發反應堆跳堆保護[1]。執行試驗的功率越高,則經濟效益越明顯。但由于高功率平臺主蒸汽流量需求會相應增大,亦會增加SG液位低低觸發跳堆的風險。
王云偉等采用先進的圖形化建模工具,對給水調節的控制邏輯和控制策略進行了1∶1仿真研究[1]。楊宗偉等在嶺澳二期核電站進行了蒸發器水位控制系統試驗[2]。劉道光等在陽江核電廠1#機組對給水控制系統旁路閥進行了優化[3]。陳智等對嶺澳核電站蒸汽發生器給水控制系統改進方案進行了仿真驗證[4]。周世梁、劉玉燕等基于魯棒PID迭代優化方法,設計了蒸汽發生器水位控制系統的PID型主控制器,并整定了蒸汽發生器水位控制系統的主控制器參數[5-6]。萬偉等基于Petr理論,對某第三代核電站主給水系統進行了工況建模[7]。
1 某核電廠機組RB試驗分析
某核電廠1#機組RB試驗前功率約77%FP, 1#、3#電動主給水泵運行。1#機組RB試驗結果如圖1所示。

圖1 1#機組RB試驗結果 Fig.1 Results of unit 1 RB test
試驗過程中,1#電動主給水泵跳閘,“汽—水”壓差突然下降,3#電動主給水泵轉速指令在控制器調節下短時間內輸出至最大值5 254 r/min。隨著3#電動主給水泵轉速的提升,主給水流量迅速增加,SG液位在達到最低點后開始回調;隨著“汽—水”壓差的提升,3#電動主給水泵逐漸轉速回調,SG液位調節恢復至正常水平。3個環路中,2環路SG液位降至最低,為-0.85 m。
某核電廠2#機組RB試驗前功率約76%FP, 2#、3#電動主給水泵運行。試驗過程中,3#電動主給水泵跳閘,3個環路中2環路SG液位降至最低,為-0.75 m。2#機組RB試驗SG液位/電動主給水泵轉速變化趨勢如圖2所示。

圖2 2#機組RB試驗結果 Fig.2 Results of unit 2 RB test
分析1#和2#機組試驗數據可知,電動主給水泵RB試驗過程中,由于突然失去1臺電動主給水泵供水,機組功率迅速下降, SG液位波動劇烈。在控制系統的自動響應下,液位逐漸恢復至穩定。在整個試驗過程中,“SG液位低”觸發跳堆的風險明顯增加。試驗前的功率越高,則這種風險越大。為防止機組跳堆,機組正常運行階段電動主給水單泵檢修時,機組功率必須降至80%FP以下。在此種情況下,機組運行功率較低,會導致經濟效益較差。因此,在保證機組安全運行的前提下,通過優化電動主給水泵系統控制邏輯的方式,提高RB試驗的功率,可有效提升機組經濟效益,降低機組跳堆的風險,進而提高機組運行的安全穩定性。
2 電動主給水跳泵觸發試驗優化
2.1 電動主給水系統控制原理分析
CPR1000機組電動主給水泵轉速調節通過PI控制器來實現。其中,“汽—水”壓差隨蒸汽負荷變化的函數程序為參考定值,“汽—水”壓差實測值為過程量[8]。電動主給水泵轉速控制調節原理如圖3所示。當在一臺電動主給水泵跳閘時,“汽—水”壓差迅速下降。在PI控制器作用下,運行的電動主給水泵轉速迅速提升,以提升“汽—水”壓差,增加給水流量。在此調節過程中,由于“汽—水”差壓不足,導致給水流量偏低。
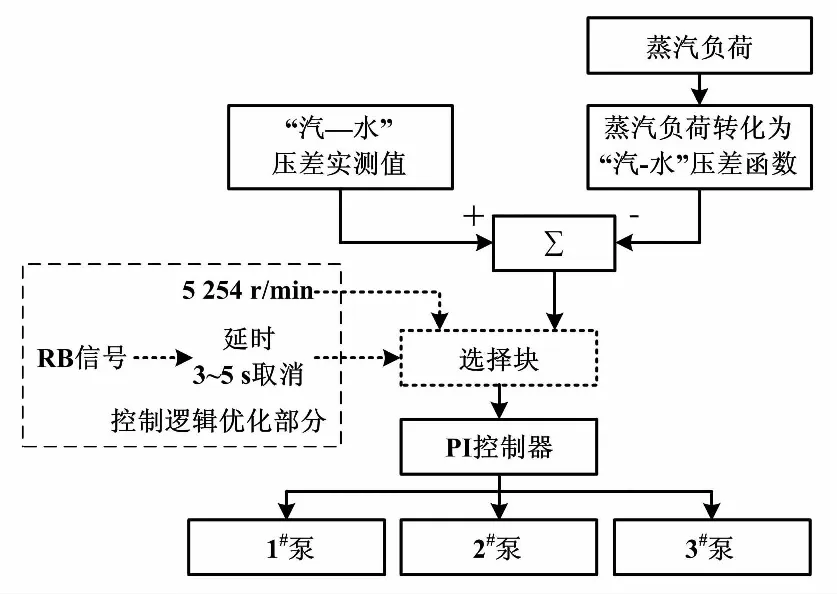
圖3 轉速控制調節原理圖 Fig.3 Schematic diagram of the speed control and regulation
2.2 控制邏輯優化方案研究
分析1#/2#機組試驗數據及電動主給水系統控制邏輯可知,由于PI控制器調節存在一定程度的延遲,轉速指令從初始的轉速提升至最高轉速(5 254 r/min)耗時約28~30 s。若能通過優化控制邏輯,縮短轉速提升時間,能在很大程度上緩解試驗過程中電動主給水泵供水能力不足的現象。
優化方案(見圖3虛線框內所示控制邏輯優化部分)如下。
①電動主給水泵RB信號出現后,將電動主給水泵控制器切換至手動,同時將泵轉速直接調整至最高值。
②延時3~5 s后,取消控制器手動控制,使電動主給水泵轉速調節系統根據“汽—水”差壓信號自動控制。
控制邏輯優化后,若RB信號觸發,則在運電動主給水泵轉速會在短時間內提升至最大,迅速增加主給水流量,優化SG液位控制;同時,通過提升功率來執行RB試驗,給機組帶來經濟效益。
3 某核電廠3#機組觸發試驗分析
3.1 優化邏輯3#機組RB試驗
控制邏輯優化現場變更實施完成后,先后兩次進行電動主給水泵RB試驗,以驗證此方案的正確性。第1次RB試驗執行功率平臺約80%FP, 1#、3#電動主給水泵運行。試驗過程中,3#電動主給水泵跳閘,3個環路中2環路SG液位降至最低,為-0.648 m。3#機組第1次RB試驗結果如圖4所示。對比1#/2#機組試驗數據可知,控制系統有較大程度的優化。
第2次RB試驗執行功率平臺約84%FP, 1#、3#號電動主給水泵運行。試驗過程中,3#電動主給水泵跳閘,三個環路中2環路SG液位最低,為-0.816 m。3#機組第2次RB試驗結果如圖5所示。提升功率執行試驗后,機組跳堆風險仍可控。
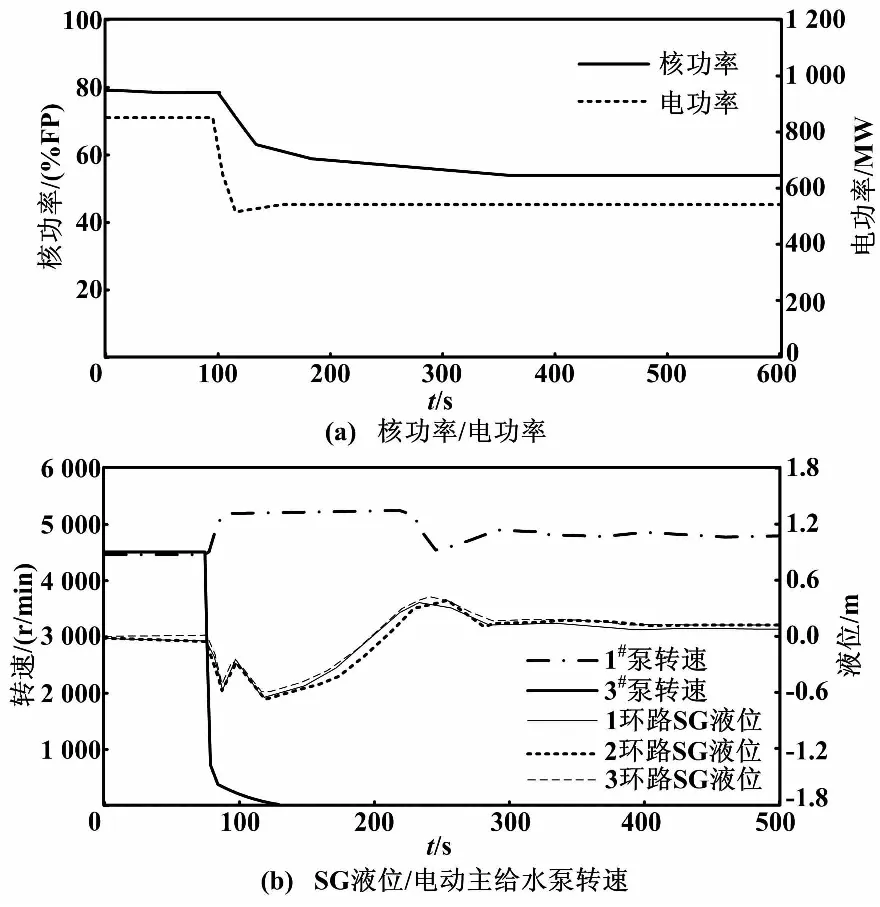
圖4 3#機組RB試驗結果(第1次) Fig.4 Results of unit 3 RB test(the first time test)

圖5 3#機組RB試驗結果(第2次) Fig.5 Results of unit 3 RB test(the second time test)
3.2 優化效果
經過分析機組的4次RB試驗過程,可發現在控制邏輯優化后3#機組試驗數據優于1#/2#機組。試驗數據如表1所示。
由表1可知,實施此優化方案后,機組的控制性能有較大程度的提升,RB試驗功率最高達到了84%FP(由2#機組的最低76%FP提升至最高84%FP)。試驗過程中,SG液位最低至-0.816 m,相較-0.9 m的危險閾值仍有裕量。試驗結果表明,該方案在提升機組安全性及經濟性方面具有良好的效果。

表1 電動主給水泵RB試驗數據Tab.1 Test data of motor-driven feed water pump during RB
4 結束語
通過優化控制邏輯的方法,提升了電動主給水泵RB工況下給水控制系統的性能,取得了良好的效果。試驗結果表明:該方案在RB試驗工況觸發的瞬間,可迅速提升主給水流量,減小反應堆跳堆風險,提升機組安全運行質量。后續機組在電動主給水泵單泵檢修工
況下均可在此功率平臺進行,有效提升了機組的經濟效益。
該研究方法已成功應用于某核電廠3#機組,后續可推廣至CPR1000其他在建機組。該方法對EPR、華龍一號、AP1000等三代機組也具有一定的參考價值。
參考文獻:
[1] 王云偉,周海翔,王黎澤,等.非能動安全型核電站給水調節控制方案仿真驗證[J].自動化儀表,2013,34(5):62-65.
[2] 楊宗偉,欒振華,張旭峰.嶺澳核電站二期工程3號機組反應堆控制系統啟動試驗研究[J].廣東電力,2011(4):34-38.
[3] 劉道光,李賢民,張小磊,等.陽江核電廠1號機組旁路閥優化策略研究[J].核動力工程,2016,37(4):87-89.
[4] 陳智,張英,張帆,等.嶺澳核電站蒸汽發生器水位控制系統改進方案仿真研究[J].核動力工程, 2010(4):66-70.
[5] 周世梁,劉玉燕.魯棒PID控制器的H_∞回路成形優化設計及其在蒸汽發生器水位控制中的應用[J].原子能科學技術,2013(6):996-1002.
[6] 劉玉燕,周世梁.蒸汽發生器水位PID控制器的H_∞回路成形優化[J].熱能動力工程,2013(4):395-401.
[7] 萬偉,董慕杰,劉瑋,等.基于Petri網理論的核電站主給水系統建模及其可靠性分析[J].熱力發電,2013(12):17-21.
[8] 濮繼龍.廣東大亞灣核電站運行教程[M].北京:原子能出版社,1999:85-86.
猜你喜歡
設備管理與維修(2022年21期)2022-12-28 07:34:58
設備管理與維修(2022年21期)2022-12-28 07:33:36
房地產導刊(2022年5期)2022-06-01 06:20:14
中國特種設備安全(2022年1期)2022-04-26 14:15:58
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
中國核電(2017年1期)2017-05-17 06:10:11
