MiroSot足球機器人電機驅動系統設計
2018-04-23 12:09:22劉銀萍
自動化儀表 2018年3期
劉銀萍
(廣東工業大學實驗教學部,廣東 廣州 510006)
0 引言
在足球機器人比賽系統中,足球機器人的運動速度和精度將直接影響球隊的勝負。機器人的精確運動控制,主要取決于車輪電機驅動系統的性能。比賽中,機器人小車微處理器大多使用單片機,如:ATMEGA163、C8051和MCS-96等。這些控制芯片有些雖然是面向電機控制的,但并不具備快速處理能力,實時性不強[1]。
本設計采用由美國TI公司生產的16位處理器DSP-TMS320LF2407A作為控制器,之所以沒有選用32位DSP或更高檔芯片是因為機器人的速度分為正負127檔,16位定點處理器精度己經足夠[2]。TMS320LF2407A集數字信號處理器(digital signal processor,DSP)的高速信號處理運算能力和適于電機控制的外圍電路于一體。采用TMS320LF2407A芯片構造電機驅動系統,不僅簡化了電路,降低了系統的損耗,而且提高了系統的準確性和實時性。
1 系統硬件設計
1.1 整體設計
本文采用雙電機分別驅動左右兩輪。電機驅動系統硬件主要包括微控制器TM3S20LF2407A、電機驅動脈寬調制(pulse width modulation,PWM)橋式電路、編碼盤等電路。直流電機驅動控制電路方案整體結構設計如圖 1 所示。電機驅動系統的電路設計主要使用TM3S20LF2407A芯片的3個模塊:PWM 模塊、QEP 模塊和A/D 模塊。電機采用PWM方式驅動,TM3S20LF2407A產生4 路載波比為20 kHz的高分辨率PWM波,用來控制兩個電機的速度方向和大小。驅動電路采用含有雙H 橋的L298驅動器來驅動電機。兩個QEP捕獲單元實現對兩個電機的光電碼盤反饋信號的鑒相和計數。A/D 轉換模塊用于電機的電樞電流檢測。

圖1 電路整體結構圖 Fig.1 Overall structure of the circuit
1.2 電機驅動電路設計
由于TMS320LF2407A輸出的PWM信號,電壓為脈沖形式,輸出的電流很小,不足以直接驅動電機運行,需使用驅動器將其轉換成可驅動電機的驅動信號。本設計使用L298雙H橋驅動器驅動。L298是SGS公司的產品,內部包含4通道邏輯驅動電路,是一種二相和四相電機的專用驅動芯片[3]。由于L298內部集成有兩個H橋的高電壓大電流雙全橋式驅動器,這樣就可以用一片L298驅動兩個電機。由于其接口簡單,直接與TMS320LF2407A事件管理器產生的一對PWM信號相連,就可以控制一個電機的轉速與轉向,控制方便,大大簡化了電路。L298的Vss接控制邏輯電源,Vs接驅動電機電源口[4]。IN1~IN4輸入引腳為標準 TTL邏輯電平信號[5],用來控制 H 橋的開與關即實現電機的正反轉。ENA、ENB 引腳則為使能控制端,用來輸入 PWM 信號,實現電機調速。信號輸出端OUTl、OUT2和 OUT3、OUT4之間分別接兩個電機[6],用于控制電機。另外,L298 的 SENA,SENB 引腳通過 0.5 kΩ的電阻接地,為電流反饋引腳,以便實現系統的電流閉環控制[7]。由于足球機器人的比賽環境比較惡劣,常有強烈碰撞發生,小車電機經常會發生堵轉和快速反轉。
本設計利用IN4007二極管進行反接,實現電路保護,防止由于電機因堵轉等原因產生高脈沖沖擊電壓而損壞驅動器[8]。另外,L298中設計了過流保護電路。LM358是一個電壓比較器,IN1(+)/IN2(+)電壓為1 V。當IN1(-)/ IN2(-)的電壓低于IN1(+)/IN2(+)電壓時,OUT1/OUT2輸出高電平,驅動L298的ENA /ENB管腳使芯片正常工作;否則輸出低電平,關閉L298。電機驅動電路如圖2所示。
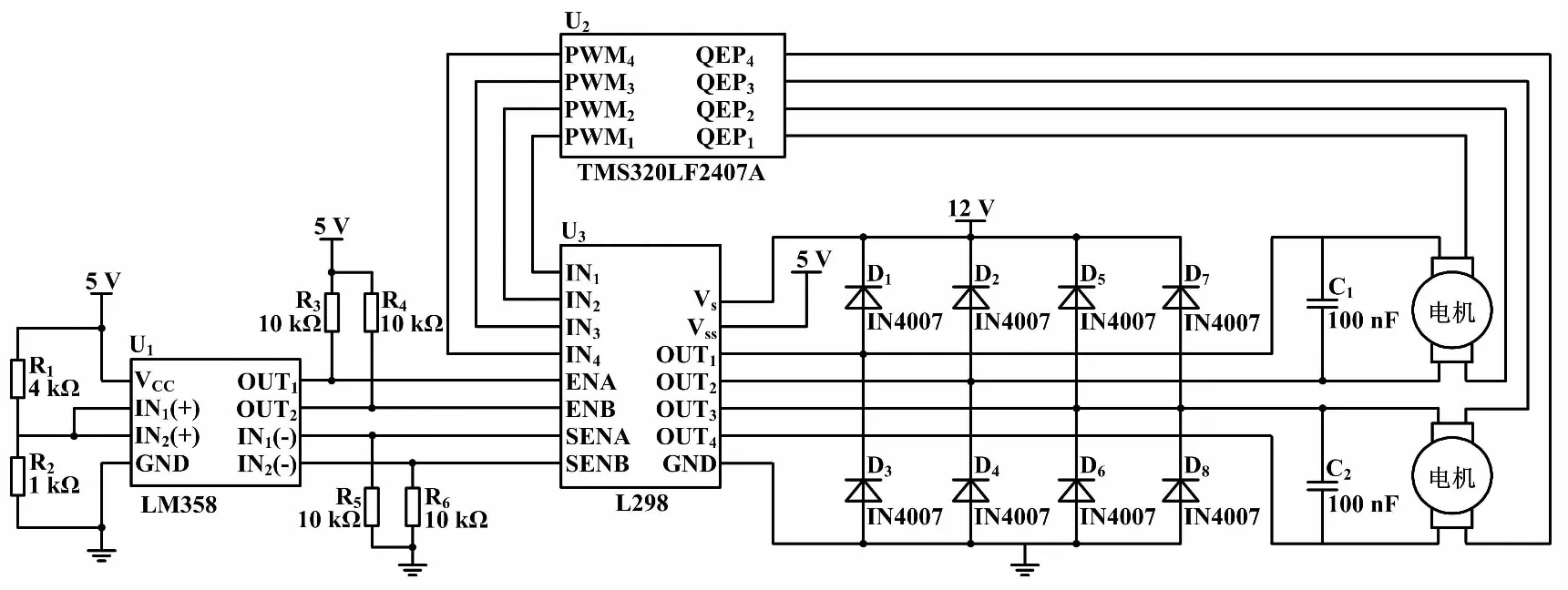
圖2 電機驅動電路 Fig.2 Driving circuit of the motor
1.3 電機速度檢測模塊
考慮到機器人的尺寸和功耗的限制,必須選用體積小、功耗低的電機。本設計采用德國FAULHABER公司生產的2224U0006SR微型直流電機,利用電機配套的增量式光電碼盤IE2-512來檢測電機的轉速。增量式光電碼盤由光柵盤(碼盤)和光電檢測裝置組成[9]。光柵盤是在一定直徑的原板等分地開通若干個孔,由于光柵盤與電機同軸,電機旋轉時,光柵盤與電機同速旋轉,經發光二極管等電子元件組成的檢測裝置檢測出若干個脈沖信號。通過計算每秒光電編碼器輸出脈沖的個數就能反映當前電機的轉速。利用光電碼盤輸出兩路相位相差90°的兩路脈沖這一特性來鑒別電機轉向。 電機編碼器光電檢測電路如圖3所示。
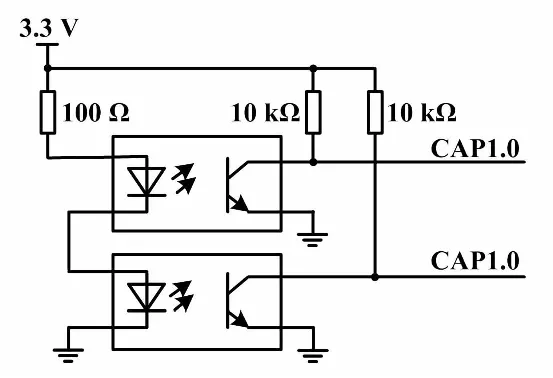
圖3 光電檢測電路 Fig.3 Photoelectric detection circuit
TMS320LF2407A帶有兩個正交編碼脈沖(QEP)電路,用于接收兩個電機的編碼盤脈沖信號。但是光電編碼器輸出信號為差分信號,需要轉換成單端信號才能輸入到TMS320LF2407A的QEP模塊。電機編碼盤與TMS320LF2407A接口電路如圖4所示。本設計采用四差分線路接收器 AM26LS32,將編碼盤輸出的差分信號A+、A-,B+、B-轉換為A、B兩路單端正交脈沖信號。由于光電編碼器供電電壓是5 V,輸出的信號也是5 V電平,而DSP工作電壓是3.3 V,所以本設計采用雙電源供電的雙向收發器74LVC4245,將5 V轉換成3.3 V電平。TMS320LF2407A控制器的QEP1、QEP2端口將捕獲脈沖信號A、B的數據存放在寄存器中,通過比較捕獲到的A、B兩相脈沖信號,確定電機的正反轉狀態和轉速。
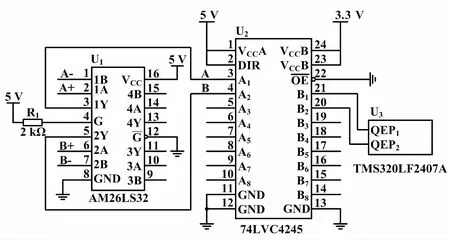
圖4 電機編碼盤與TMS320LF2407A接口電路 Fig.4 Interface circuit of motor encoder and TMS320LF240TA
2 系統軟件設計
電機控制程序流程圖如圖5所示。在系統上電后,首先初始化控制器參數,實時讀取串口通信中斷程序接收到的機器人給定轉速和定時器中斷采樣車輪的實際測量速度。若兩者速度一致,則實際轉速不變;否則TMS320LF2407A處理器根據給定轉速與實際測量速度,得到速度偏差值,經過PID控制算法模塊計算出新的控制量,輸出PWM信號驅動電機。
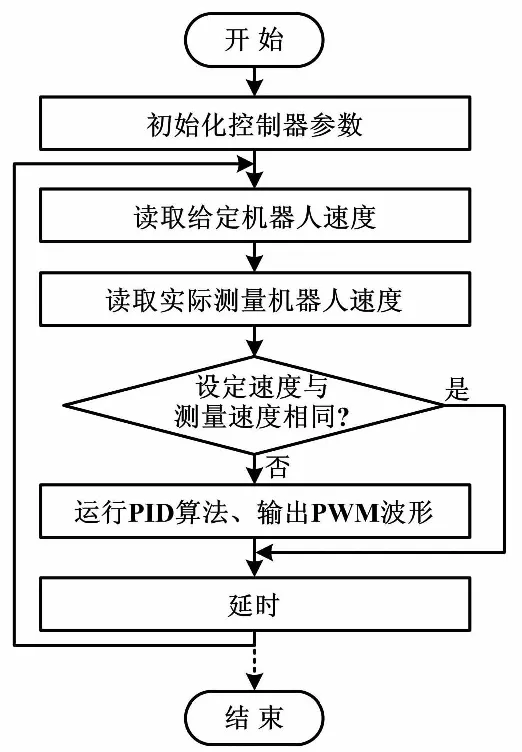
圖5 電機控制程序流程圖 Fig.5 Program flowchart of motor control
3 試驗及結果分析
經試驗測定,足球機器人啟動時間、制動時間如表1所示。機器人速度測試結果如表2所示。從測試結果可以看出,機器人電機無論正轉還是反轉,左、右輪的輸出線性都很好,兩輪的協調性也較好,實際輸出轉速達到了上位機給定值,控制精度較高,滿足實際需要。
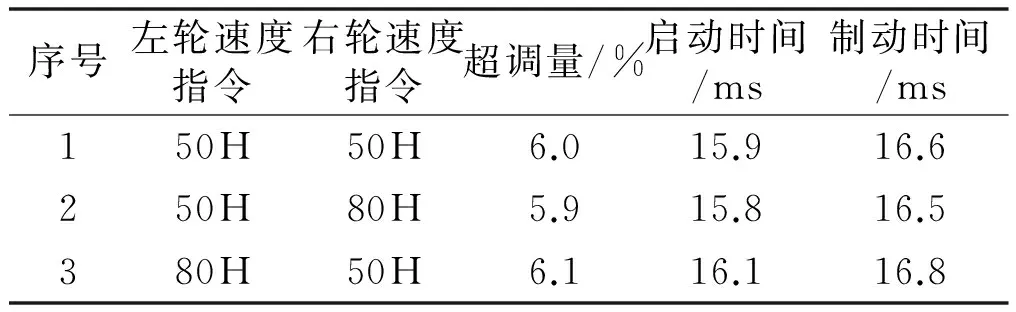
表1 機器人啟動、制動時間Tab.1 Starting and braking time of robot

表2 機器人速度測試結果Tab.2 Test results of robot speed
4 結束語
本文闡述了以TMS320LF2407A為控制核心的MiroSot足球機器電機驅動系統的軟硬件設計。基于H橋功率驅動電路以及PWM脈寬調制原理,選用16位的DSP芯片TMS320LF2407A與H橋芯片L298組成兩路電機的可逆調速系統,并采用增量式光電編碼器作速度檢測,設計了一種直流電機正、反轉驅動調速控制電路。該電路克服了傳統單片機、32位DSP或其他方法存在的電路復雜、可靠性低、實時性不強等缺點,滿足了機器人的功能要求,取得了較為理想的控制效果。
參考文獻:
[1] 高健,黃心漢,彭剛.基于DSP的集控式足球機器人控制系統設計[J].計算機工程與應用,2006(12):19-21.
[2] 周科.RoboCup小型組(F-180)足球機器人的運動控制和路徑規劃[D].杭州:浙江大學,2004.
[3] 楊維,殷希梅.一種微小型偵察球無線控制系統的設計[J].電子設計工程,2012,20(19):157-160.
[4] 李曉鵬,劉建都.基于Smith算法的模糊PID控制器的設計[J].微計算機信息,2009,25(31):66-67.
[5] 陳存,路林吉.基于模糊PID算法的服裝送帶機控制系統[J].自動化儀表,2017,38(4):37-40.
[6] 繆曉中.一種基于Inte18253與L298N的電機PWM調速方法[J].國外電子元器件,2005(12):26-28.
[7] 王蘭蘭.集控式微型足球機器人的研究與設計[D].大連:大連理工大學,2005.
[8] 嚴平鋒,凌志浩,蔣煒.步進電機的控制與檢測系統的設計與實現[J].自動化儀表,2014,35(4):38-42.
[9] 劉維.全自主足球機器人控制系統研究[D].贛州:江西理工大學,2008.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
