基于升軌方式的低軌衛(wèi)星主動離軌處置策略
2018-04-24 12:49:47張國云樊恒海蔡立鋒張國龍王大鵬祝俊淞
航天器工程 2018年2期
張國云 樊恒海 蔡立鋒 張國龍 王大鵬 祝俊淞
(西安衛(wèi)星測控中心,西安 710043)
隨著低軌衛(wèi)星數(shù)量的逐年增加,有限的近地空間資源日趨緊張,在軌運行衛(wèi)星碰撞概率不斷增大,碰撞預(yù)警和規(guī)避控制日趨常態(tài)化。對已結(jié)束在軌服務(wù)或已退役的衛(wèi)星進行主動離軌處置,不僅可以減小其與在軌正常工作衛(wèi)星可能的碰撞風(fēng)險,確保當(dāng)前在軌運行衛(wèi)星及后續(xù)發(fā)射與運行任務(wù)的安全,同時還可釋放占用的空間資源,為其他衛(wèi)星及后續(xù)衛(wèi)星留出軌道位置[1-4]。
目前,高軌衛(wèi)星的主動離軌處置主要通過抬高軌道高度(升軌方式)或者軌道高度與傾角聯(lián)合控制等方式,將退役衛(wèi)星推入墳?zāi)管壍溃M行鈍化處置[2]。低軌衛(wèi)星的主動離軌處置主要通過降低軌道高度,依靠大氣阻力作用使衛(wèi)星再入大氣層燒毀。然而,采用降軌方式進行主動離軌處置時,存在兩方面問題:①隨著軌道高度的降低,空間碎片及在軌衛(wèi)星數(shù)量逐漸增加,待離軌低軌衛(wèi)星會威脅到在軌正常運行的衛(wèi)星,尤其在軌道高度降低到900 km左右時,空間碎片數(shù)量發(fā)生躍變,發(fā)生碰撞的概率大大增加;②根據(jù)機構(gòu)間空間碎片協(xié)調(diào)委員會(IADC)編訂的《IADC空間碎片減緩指南》,低軌衛(wèi)星在任務(wù)完成后主動離軌,需要在25年內(nèi)再入大氣層燒毀[5]。對于軌道高度大于900 km的低軌衛(wèi)星,若在大氣阻力作用下使其自然衰減,需要花費上千年的時間,大大超過25年以內(nèi)的要求。若采用升軌方式的離軌處置策略,可以避免以上兩個問題。對于低軌衛(wèi)星,升軌方式的離軌處置策略在蘇聯(lián)衛(wèi)星的核反應(yīng)堆艙段上應(yīng)用過,核反應(yīng)堆艙段從200 km機動到約1000 km的軌道高度,以防止其污染地球環(huán)境[6];而對于低軌整顆衛(wèi)星的升軌方式主動離軌處置策略,以及后續(xù)的協(xié)調(diào)策略,還未有詳細(xì)分析。
本文基于衛(wèi)星長期管理過程中的工程應(yīng)用實踐,提出了升軌方式的低軌衛(wèi)星主動離軌處置策略。在綜合考慮軌道高度、剩余燃料、碰撞風(fēng)險及離軌后器件在軌壽命考核,以及空間科學(xué)試驗價值的基礎(chǔ)上,進一步提出了“保能源、保燃料、保測控”的協(xié)調(diào)策略。最后,以已退役的某低軌衛(wèi)星為例,對提出的離軌處置策略進行了驗證。
1 主動離軌處置策略
對于低軌衛(wèi)星在完成任務(wù)后進行離軌機動,IADC僅給出了原則性的處理要求與建議,至于目標(biāo)軌道參數(shù),可由各衛(wèi)星所屬機構(gòu)自行研究決定。由于整星采用升軌方式進行離軌控制無經(jīng)驗可循,因此,目標(biāo)軌道區(qū)域主要根據(jù)空間碎片及在軌衛(wèi)星數(shù)量與軌道高度的關(guān)系,以及燃料受限情況確定。目標(biāo)軌道高度確定后,還要確定相應(yīng)的軌道轉(zhuǎn)移方式。同時,考慮到離軌后空間科學(xué)和應(yīng)用試驗的需要,衛(wèi)星進入目標(biāo)軌道后,還要有相應(yīng)的安全處置策略。按照“保能源、保燃料、保測控”的協(xié)調(diào)策略,提出對離軌后低軌衛(wèi)星的安全處置策略。離軌處置過程如圖1所示。
1.1 離軌目標(biāo)軌道區(qū)域確定
圖2給出了在500~1400 km的空間碎片及在軌衛(wèi)星數(shù)量隨軌道高度(h)的變化關(guān)系。由圖2可得,h約為900 km時,空間碎片及在軌衛(wèi)星數(shù)量發(fā)生躍變。因而,若將待離軌衛(wèi)星自h約為900 km向下調(diào)整時,降軌控制過程需要消耗較多燃料,若出現(xiàn)燃料不足的情況,將不能完成后續(xù)離軌操作,且無法將衛(wèi)星送至25年隕落地面的軌道上。另外,隨著h的不斷減小,碰撞的可能性大大增加,會威脅到在軌正常運行的衛(wèi)星[7]。由此可見,在燃料受限的情況下,應(yīng)考慮升軌方式,升軌后的軌道高度分布的衛(wèi)星相對較少,碰撞概率較小。在h低于1200 km的空間中,空間碎片及在軌衛(wèi)星數(shù)量明顯較多,當(dāng)h在1300~1400 km時,空間碎片及在軌衛(wèi)星數(shù)量又有所增加。綜合以上,對于h高于900 km的衛(wèi)星,主動離軌后目標(biāo)區(qū)域范圍為h低于1300 km。
1.2 軌道轉(zhuǎn)移方式
根據(jù)衛(wèi)星軌道控制原則和軌道控制動力學(xué)特性,為保證偏心率穩(wěn)定,相鄰2次控制時刻的軌道相位差應(yīng)保證約為180°。實施雙脈沖共面變軌最優(yōu)的方式為霍曼變軌[8],霍曼變軌在理論上也是圓軌道之間最節(jié)省燃料的變軌方式[9],因而選擇霍曼變軌將待離軌衛(wèi)星轉(zhuǎn)移到目標(biāo)軌道。
待離軌衛(wèi)星變軌的基本原理如圖3所示,O為地心;R1為離軌前衛(wèi)星軌道地心距;R2為實際離軌控制后進入的軌道地心距;ΔV1和ΔV2為2次變軌時刻對應(yīng)的速度增量。在A1對衛(wèi)星施加第一脈沖速度增量ΔV1,抬高衛(wèi)星近地點,進入橢圓形的轉(zhuǎn)移軌道,該橢圓分別與兩圓相切,切點即為轉(zhuǎn)移軌道的近地點和遠地點。衛(wèi)星沿轉(zhuǎn)移軌道運行至A2,此時A2成為衛(wèi)星新軌道的遠地點,施加第二脈沖速度增量ΔV2,衛(wèi)星進入目標(biāo)軌道,變軌結(jié)束。
根據(jù)霍曼變軌理論,計算可得衛(wèi)星雙脈沖速度增量為[10]
(1)
式中:地球引力常數(shù)μ=3.986 005×1014。
實際上,進行衛(wèi)星離軌控制時,要采用多批次小控制量兩脈沖霍曼變軌,逐漸抬高衛(wèi)星軌道高度,最終達到目標(biāo)軌道。
1.3 離軌后安全處置策略
考慮到離軌后應(yīng)急處置和空間科學(xué)試驗的需要,確定了“保能源、保燃料、保測控”的協(xié)調(diào)策路。①保能源:采用將太陽電池陣對準(zhǔn)太陽的方式保證電能充足;②保燃料:在滿足太陽電池陣對日條件下,使衛(wèi)星按照一定的角速度旋轉(zhuǎn),構(gòu)成足夠大的角動量,以保持姿態(tài)穩(wěn)定,避免使用噴氣控制消耗能源;③保測控:衛(wèi)星的自旋角速度在一定范圍內(nèi),以滿足衛(wèi)星的測控條件。“保能源、保燃料、保測控”的要求,互相制約,形成合理的處置策略。
1.3.1 保能源
為便于分析,建立衛(wèi)星本體坐標(biāo)系ObXbYbZb和軌道坐標(biāo)系OoXoYoZo,衛(wèi)星質(zhì)心為Ob(Oo)。為保證較好的光照,起旋前,先將衛(wèi)星本體繞偏航軸負(fù)向轉(zhuǎn)動90°,并將兩副太陽電池陣驅(qū)動到270°后停轉(zhuǎn),這時太陽電池陣的電池片法線是指向衛(wèi)星本體的,即軌道坐標(biāo)系(OoXoYoZo)的-Yo方向(太陽方向),見圖4。太陽電池陣調(diào)整后,對著太陽,可確保衛(wèi)星電能供給。
1)離軌前后飛行狀態(tài)對比分析
圖4(a)表示出了3軸對地穩(wěn)定飛行過程中衛(wèi)星運行狀態(tài)與太陽電池陣的位置關(guān)系。在此過程中,衛(wèi)星本體坐標(biāo)系中3軸指向與軌道坐標(biāo)系3軸指向保持一致。在圖4(b)中的自旋狀態(tài)下,衛(wèi)星繞本體坐標(biāo)系Xb軸旋轉(zhuǎn),衛(wèi)星本體坐標(biāo)系Yb軸指向衛(wèi)星飛行方向。
2)降交點地方時漂移對光照條件的影響分析
在軌運行過程中,由于太陽引力攝動,衛(wèi)星傾角會發(fā)生長期的緩慢變化,進而引起降交點地方時漂移。因此,需要計算出目標(biāo)軌道降交點地方時的變化,判斷太陽電池陣光照條件。
1.3.2 保燃料
由自旋剛體定向性和穩(wěn)定性原理可知:在沒有外力矩作用時,當(dāng)且僅當(dāng)衛(wèi)星本體以慣量主軸為轉(zhuǎn)軸時,轉(zhuǎn)軸才具有定向性;當(dāng)衛(wèi)星本體自旋軸為其最大慣量主軸或最小慣量主軸時,衛(wèi)星旋轉(zhuǎn)狀態(tài)才是穩(wěn)定的[11]。考慮到實際空間環(huán)境的復(fù)雜性,且衛(wèi)星帶有太陽翼等撓性附件,分析中不能簡單作為剛體處理。進一步根據(jù)半剛體衛(wèi)星自旋穩(wěn)定原理可知:任何形狀的衛(wèi)星本體,只有繞最大慣量主軸的自旋才具有穩(wěn)定性。
1)衛(wèi)星慣量主軸計算與自旋軸確定
利用衛(wèi)星質(zhì)量和慣量特性,計算3軸主慣量IXb,IZb,IYb(慣性坐標(biāo)系在本體坐標(biāo)系下的投影),三者最大值即為衛(wèi)星旋轉(zhuǎn)慣量主軸。根據(jù)衛(wèi)星特點及推力器安裝布局,為滿足自旋條件,同時考慮將來消旋可能對燃料的消耗,在確保對測控影響較小的前提下,可通過滾動軸噴氣使衛(wèi)星本體繞慣量主軸以自旋角速度旋轉(zhuǎn),自旋穩(wěn)定后將衛(wèi)星推進系統(tǒng)關(guān)閉,保證燃料的零消耗。
2)衛(wèi)星自旋角速度選擇原則
根據(jù)衛(wèi)星剛性設(shè)計原則,自旋角速度小于等于9 (°)/s,否則存在解體的可能性。為了便于監(jiān)測自旋角速度,角速度應(yīng)保持在衛(wèi)星測量部件測量范圍之內(nèi),且要考慮地面設(shè)備測控跟蹤的有效性。衛(wèi)星自旋后,自旋角速度長期受到外力矩(太陽光壓等)的影響并呈增加趨勢,因此還要考慮將來對衛(wèi)星消旋處置的燃料消耗。
3)估算角動量與衛(wèi)星本體坐標(biāo)系3軸的夾角
衛(wèi)星在本體坐標(biāo)系下的慣量張量及衛(wèi)星本體慣量參數(shù)為
(2)
衛(wèi)星的角動量H和角速度ωb分別為
(3)
式中:ωXb,ωYb,ωZb為慣性坐標(biāo)系下3軸角速度在本體坐標(biāo)系下的投影。
通過計算,可得角動量H與衛(wèi)星本體坐標(biāo)系3軸的夾角及H的變化趨勢。同時,通過在軌數(shù)據(jù)驗證,自旋軸與最大角動量方向基本一致,衛(wèi)星本體繞其最大慣量主軸旋轉(zhuǎn),能夠長期保持自旋穩(wěn)定。
1.3.3 保測控
測控條件需要分析干涉區(qū),當(dāng)衛(wèi)星側(cè)旋至干涉區(qū)對地時,有可能導(dǎo)致地面遙測信號的短暫失鎖和遙控信號的閃鎖斷,因此要計算閃鎖斷時間及閃鎖斷次數(shù)。如圖5所示,衛(wèi)星測控信號在衛(wèi)星本體坐標(biāo)系-Zb軸方向半球內(nèi)存在11°左右的2個干涉區(qū),在角速度為自旋狀態(tài)下,若自旋角速度為1 (°)/s,閃鎖斷時間約為11 s。因此,在衛(wèi)星旋轉(zhuǎn)一周的6 min弧段內(nèi)將會出現(xiàn)2次閃鎖斷。
注:最外圈圓外數(shù)值表示偏離±Zb軸指向(角度),單位為(°);實線圓表示不同指向上的增益,單位為dBi。
圖5 測控天線方向圖
Fig.5 Pattern of TT&C antenna
2 試驗驗證結(jié)果及分析
根據(jù)確定的主動離軌處置策略,對已退役的某太陽同步軌道衛(wèi)星進行離軌控制。該衛(wèi)星的軌道高度為1200 km,剩余燃料約32 kg(若按降軌150 km計算,要消耗燃料33 kg,屆時將出現(xiàn)燃料不足的情況),降交點地方時為09:30,陀螺的角速度測量范圍為[-2.5,+2.5](°)/s。
2.1 離軌控制效果評估
由于目標(biāo)區(qū)域范圍不大于1300 km ,綜合考慮節(jié)省燃料用于后續(xù)空間科學(xué)試驗的需要,試驗時抬升軌道50 km,即軌道高度提高到1250 km,消耗燃料約13 kg(剩余約20 kg)。在該軌道高度分布的空間碎片數(shù)量較少,且軌道抬升后衛(wèi)星軌道高度衰減時間大大增長(見表1)。
在軌道轉(zhuǎn)移時,按兩脈沖霍曼變軌實施控制,通過4次兩脈沖霍曼變軌,將衛(wèi)星軌道抬高進入預(yù)定高度,控制誤差小于1%,剩余燃料能滿足后續(xù)空間科學(xué)試驗需要,確保離軌控制的安全性和有效性。離軌控制期間半長軸變化情況見圖6。
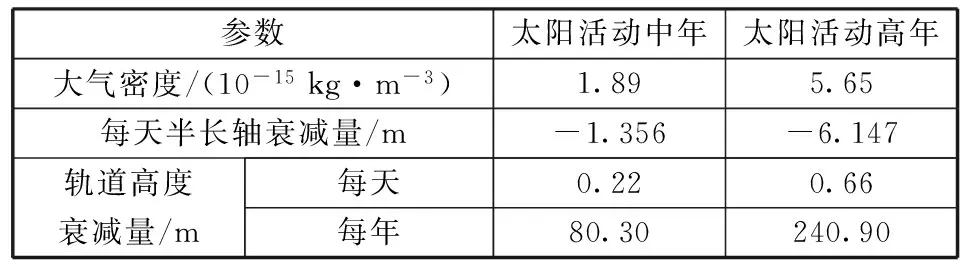
表1 調(diào)整后軌道高度衰減估計Table 1 Estimation of orbit altitude attenuationafter adjustment
2.2 離軌后安全處置結(jié)果評估
2.2.1 保能源
降交點地方時與太陽光照條件的關(guān)系,如圖7所示[12],降交點地方時為00:00或12:00時,軌道平面大致與太陽光平行,而在06:00或18:00時,軌道平面大致與太陽光垂直。衛(wèi)星太陽電池陣安裝在衛(wèi)星本體坐標(biāo)系±Yb軸,方向與軌道面平行,因而當(dāng)降交點地方時為06:00或18:00時,光照條件最好。經(jīng)過數(shù)值仿真,主動升軌至軌道高度1250 km 后,3年內(nèi)降交點地方時變化曲線見圖8,降交點地方時向06:00方向漂移,太陽電池陣入射角逐漸減小,光照條件不斷變好,衛(wèi)星電源供給能力逐步提高。
2.2.2 保燃料
衛(wèi)星3軸主慣量關(guān)系為IXb>IZb>IYb,衛(wèi)星自旋軸為Xb。通過滾動軸正向噴氣使衛(wèi)星本體繞Xb軸以約1 (°)/s的角速度實現(xiàn)自旋。通過仿真分析,自旋軸角速度越大,章動角越小:自旋角速度約為1 (°)/s時,姿態(tài)角基本收斂,而在自旋角速度約為0.5 (°)/s時,姿態(tài)角有發(fā)散的趨勢,如圖9~10所示。其中:在圖9(a)和圖10(a)中,Yb軸和Zb軸的有交疊;在圖9(b)和圖10(b)中,Xb軸和Yb軸的有交疊。
確定自旋角速度約為1 (°)/s后,計算角動量H與衛(wèi)星本體坐標(biāo)系3軸的夾角及其變化趨勢。將該衛(wèi)星慣量張量及衛(wèi)星本體慣量參數(shù)I代入式(3)中,計算可得角動量H與衛(wèi)星本體坐標(biāo)系3軸的夾角及角動量H的變化趨勢,如圖11所示。
由圖11(a)~11(c)可見,角動量H與衛(wèi)星本體坐標(biāo)系Xb,Yb,Zb軸的夾角趨于1.5°,89.3°,90.4°。衛(wèi)星不是純剛體,由于能量耗散,角動量H最終集中在慣量主軸方向,沿Xb軸方向(即角動量H方向)自旋。通過在軌數(shù)據(jù)驗證:自旋軸與最大角動量方向基本一致,衛(wèi)星本體在繞其最大慣量主軸旋轉(zhuǎn)時,能夠長期保持自旋穩(wěn)定,無需消耗燃料。
由圖11(d)可知,角動量H幅值有逐步變大的趨勢,當(dāng)角速度增大到一定門限時,可進行消旋。最大角動量與衛(wèi)星本體坐標(biāo)系3軸夾角如圖12所示。由于衛(wèi)星受到外力矩(如太陽光壓、重力梯度等)的長期影響,衛(wèi)星姿態(tài)和自旋軸空間指向會隨著時間推移發(fā)生緩慢變化,因此,對于衛(wèi)星慣量主軸的確定,要建立相關(guān)模型,結(jié)合長期演化過程進一步分析。
2.2.3 保測控
衛(wèi)星在-Zb軸方向半球內(nèi)存在11°左右的2個干涉區(qū)(如圖5所示),干涉區(qū)內(nèi)增益有可能低于-12 dB的指標(biāo)要求。如圖13所示:當(dāng)自旋角速度為3 (°)/s(衛(wèi)星自旋一周需要2 min)時,整個跟蹤弧段可能經(jīng)歷15次閃鎖斷(應(yīng)答機自動增益控制(AGC)門限為-110 dBm),遙測接收和遙控上行會受到一定的影響,因而,為實現(xiàn)保測控目標(biāo),自旋角速度最好小于3 (°)/s。當(dāng)自旋角速度為1 (°)/s時,閃鎖斷1次時間約為11 s,衛(wèi)星旋轉(zhuǎn)一周的6 min內(nèi)會出現(xiàn)2次閃鎖斷,按照地面跟蹤一軌15 min計算,整個跟蹤弧段可能出現(xiàn)5次閃鎖斷。因此,自旋角速度為1 (°)/s能夠保證遙控上行的正確性和遙測接收的連續(xù)性,在軌數(shù)據(jù)與預(yù)期一致。
3 結(jié)論
本文提出了一種基于升軌方式的低軌衛(wèi)星主動離軌處置策略,通過對處置策略的分析及成功的工程實踐應(yīng)用,得到如下結(jié)論。
(1)對于在低軌中較高軌道的衛(wèi)星,升軌方式可以較快完成離軌處置,解決單靠大氣阻力無法實現(xiàn)25年內(nèi)再入大氣層的問題,為后續(xù)進入此軌道的衛(wèi)星留出軌道空間,同時減少碰撞風(fēng)險。
(2)目標(biāo)軌道區(qū)域主要根據(jù)空間碎片及在軌衛(wèi)星數(shù)量與軌道高度的關(guān)系,以及燃料受限情況確定。考慮到節(jié)省燃料,軌道轉(zhuǎn)移通過多次霍曼變軌實現(xiàn)。
(3)在保能源中,主要滿足太陽電池陣對準(zhǔn)太陽;在保燃料中,使衛(wèi)星按照一定的角速度自旋,構(gòu)成足夠大的角動量,以保持姿態(tài)穩(wěn)定,從而避免使用噴氣控制消耗燃料,但需要選擇合理的自旋軸空間指向和自旋角速度;在保測控中,衛(wèi)星的自旋角速度在一定范圍內(nèi)可滿足測控條件。
由于衛(wèi)星受到外力矩(如太陽光壓、重力梯度等)的長期影響,衛(wèi)星姿態(tài)和自旋軸空間指向會隨著時間推移發(fā)生緩慢變化,建立相關(guān)模型,確定衛(wèi)星慣量主軸,結(jié)合長期演化過程進一步分析,是后續(xù)需要解決的問題。
參考文獻(References)
[1] 周靜,楊慧,王莉云.中高軌道衛(wèi)星離軌參數(shù)研究[J].航天器工程,2013,22(2):11-12
Zhou Jing, Yang Hui,Wang Liyun. Study on deorbit elements of medium earth orbit satellites [J].Spacecraft Engineering, 2013, 22(2): 11-12 (in Chinese)
[2] 羅剛橋.地球靜止軌道衛(wèi)星壽命末期離軌方案研究[J].航天器環(huán)境工程,2005,22(2):73-76
Luo Gangqiao.De-orbit project of GEO satellite in the end of lifetime [J]. Spacecraft Environment Engineering, 2005, 22(2): 73-76 (in Chinese)
[3] 張玉軍,馮書興.主動式空間碎片清理研究[J].裝備指揮技術(shù)學(xué)院學(xué)報,2010,21(6):78-80
Zhang Yujun, Feng Shuxing. Research on active space debris removal [J]. Journal of Academy of Equipment, 2010, 21(6): 78-80 (in Chinese)
[4] 雷建宇,張永,鄭世貴,等.載人航天器空間碎片防護與減緩設(shè)計[J].航天器環(huán)境工程,2012,29(4):388-391
Lei Jianyu, Zhang Yong, Zheng Shigui, et al. Space debris shield and mitigation of a manned spacecraft [J]. Spacecraft Environment Engineering, 2012, 29(4): 388-391 (in Chinese)
[5] IADC. IADC space debris mitigation guidelines [EB/OL]. [2017-04-21].http://stage.tksc.jaxa.jp/spacelaw/kokusai_utyu/space_debris2/IADC.pdf.
[6] 百度百科.核動力衛(wèi)星[EB/OL].[2017-04-21].https://baike.baidu.com/item/核動力衛(wèi)星/3323111?fr=aladdin
Baidu Baike. Nuclear-powered satellite[EB/OL].[2017-04-21].https://baike.baidu.com/item/核動力衛(wèi)星/3323111?fr=aladdin (in Chinese)
[7] 劉林,楊建,王建華.近地軌道空間碎片清除策略分析[J].裝備學(xué)院學(xué)報,2013,24(2):70-73
Liu Lin, Yang Jian, Wang Jianhua. Research on space debris mitigation strategy in LEO [J]. Journal of Aca-demy of Equipment, 2013, 24(2): 70-73 (in Chinese)
[8] 楊嘉墀.航天器軌道動力學(xué)與控制[M].北京:中國宇航出版社,1995:100-105
Yang Jiachi. Dynamics and control of spacecraft orbit [M]. Beijing: China Astronautics Press,1995: 100-105 (in Chinese)
[9] 肖業(yè)倫.航天器飛行動力學(xué)原理[M].北京:中國宇航出版社,1995:72-88
Xiao Yelun. Theory of spacecraft flight dynamics [M]. Beijing: China Astronautics Press, 1995:72-88 (in Chinese)
[10] 褚桂柏.航天技術(shù)概論[M].北京:中國宇航出版社,2002:312-315
Chu Guibai. Space technology introduction [M]. Beijing: China Astronautics Press, 2002:312-315 (in Chinese)
[11] 樊恒海,魏俊,冀蓉,等.海洋二號衛(wèi)星重大故障搶救姿態(tài)恢復(fù)與軌道捕獲控制技術(shù)[R].西安:西安衛(wèi)星測控中心,2014:4-10
Fan Henghai, Wei Jun, Ji Rong, et al. Failure to rescue,attitude recovery and orbit capture control techno-logy of HY-2 satellite [R]. Xi’an: Xi’an Satellite Control Center, 2014:4-10 (in Chinese)
[12] 張國云,蔡立鋒,黃曉峰,等.近圓太陽同步衛(wèi)星軌道傾角偏差的影響和調(diào)整[J].上海航天,2014,31(2):37-41
Zhang Guoyun, Cai Lifeng, Huang Xiaofeng,et al. Impact analysis and adjustment of nearly round sun-synchronous orbit satellite injection inclination devia-tion [J]. Aerospace Shanghai, 2014, 31(2): 37-41 (in Chinese)