一種基于軌道根數(shù)約束的最優(yōu)制導(dǎo)方法
2018-04-27 10:19:00李超兵呂春紅尚騰
航空學(xué)報 2018年4期
關(guān)鍵詞:方法
李超兵,呂春紅,尚騰
北京航天自動控制研究所,北京 100854
在空間航天器為完成預(yù)定任務(wù),需要通過變軌控制來實現(xiàn)不同軌道之間的轉(zhuǎn)移,而為確保航天器能夠到達目標(biāo)軌道,同時節(jié)省變軌控制的燃料消耗,需要利用最優(yōu)控制原理設(shè)計制導(dǎo)算法。
以迭代制導(dǎo)為代表的最優(yōu)制導(dǎo)算法自應(yīng)用于美國的土星五號運載器以來,逐漸為許多航天器所采納[1-3]。針對航天器主發(fā)動機推力大小不可調(diào)的情況,傳統(tǒng)迭代制導(dǎo)通常以2個方向的位置和3個方向的速度作為5個終端約束,假設(shè)控制角指令由速度約束和位置約束兩部分組成,并且位置約束部分為小量[4-7],這樣可以首先求解滿足速度約束部分的控制角,然后利用小角度近似求解滿足位置約束部分的控制角。但這一假設(shè)并無嚴格的理論支撐,且在某些變軌情形下這一假設(shè)不再成立,從而限制了傳統(tǒng)迭代制導(dǎo)的進一步應(yīng)用[8-11]。
針對傳統(tǒng)迭代制導(dǎo)的不足,研究人員從不同的角度進行了改進研究。陳新民和余夢倫[12]針對運載火箭多級飛行的特點,在傳統(tǒng)單級迭代制導(dǎo)方程的基礎(chǔ)上,進一步推導(dǎo)了多級迭代制導(dǎo)方程;茹家欣[13]利用最優(yōu)控制原理,從火箭簡化運動方程出發(fā),以火箭推力方向的3分量為控制變量推導(dǎo)了迭代制導(dǎo)方法;池賢彬等[14]利用凸優(yōu)化技術(shù)簡化航天器的相對運動動力學(xué)模型,并通過迭代制導(dǎo)獲得追蹤航天器的制導(dǎo)策略。
進一步,在控制對象的模型復(fù)雜性和最優(yōu)控制必要條件的推導(dǎo)方式等方面,現(xiàn)有文獻也進行了改進研究。Lu等[15]結(jié)合最優(yōu)控制原理和多級打靶法推導(dǎo)了運載火箭的多級點火制導(dǎo)算法;針對大氣層內(nèi)火箭受力的復(fù)雜情況,Lu在文獻[16,17]中進一步推導(dǎo)了多級點火制導(dǎo)算法;傅瑜等[18]通過計算終端約束對協(xié)態(tài)變量的雅克比矩陣,獲得了解析求解約束方程的迭代制導(dǎo)方法;鄭旭等[19]推導(dǎo)了火箭在大氣層外的解析動力學(xué)模型,將共軛狀態(tài)向量和飛行時間作為迭代變量,給出了多終端約束下的迭代制導(dǎo)算法;鄧逸凡等[20]研究了適用于航天器空間變軌任務(wù)的迭代制導(dǎo)算法,直接以軌道根數(shù)為終端約束條件建立邊界條件;李超兵等[21]在入軌點軌道坐標(biāo)系下對制導(dǎo)的開關(guān)機點優(yōu)化,進一步得到改進的迭代制導(dǎo)方法。
現(xiàn)有文獻雖然從制導(dǎo)適應(yīng)性上對傳統(tǒng)迭代制導(dǎo)作出了種種改進,但很少直接從軌道根數(shù)的約束特性出發(fā)對制導(dǎo)算法進行設(shè)計,從而難以應(yīng)用于航天器空間變軌的一般情形。如文獻[17,18]以位置速度大小、飛行路徑角為終端約束;文獻[19,21]以位置和速度分量為終端約束;文獻[20]雖然直接針對軌道根數(shù)約束,但對乘子變量的消去處理方式復(fù)雜,不夠直觀,且沒有給出一般橢圓軌道情形下的約束方程形式。
考慮到上述文獻的不足,本文從對地心慣性坐標(biāo)系下航天器的運動模型出發(fā),利用最優(yōu)控制原理得到位置速度與協(xié)態(tài)變量初值的關(guān)系式;進一步,針對軌道根數(shù)特性,推導(dǎo)了除真近點角外的5個軌道根數(shù)約束方程,并利用終端約束中位置速度和軌道根數(shù)的關(guān)系,以及協(xié)態(tài)變量的尺度特性得到另外兩個約束方程。通過直接求解7個完整約束方程組獲得協(xié)態(tài)變量初值,進而得到最優(yōu)推力方向。仿真結(jié)果表明了所提制導(dǎo)方法的有效性。
1 最優(yōu)制導(dǎo)問題描述
考慮有限推力大小的情形,在地心慣性坐標(biāo)系下,航天器的運動模型為
(1)
式中:r為位置;V為速度;g(r)為r處的地球引力加速度矢量;T為發(fā)動機推力大小;1T為單位矢量,表示發(fā)動機推力方向;m為航天器質(zhì)量;g0為在參考半徑R0(可取地球橢球模型的長半軸)處的標(biāo)準(zhǔn)重力加速度;Isp為發(fā)動機比沖(采用重量描述,單位為s)。
考慮到發(fā)動機點火持續(xù)時間通常在幾百秒以內(nèi),航天器的運動量在整個軌道變化范圍內(nèi)可以看作小量,因此g(r)可采用式(2)近似:
(2)
(3)

(4)

制導(dǎo)的終端約束通常由關(guān)于終端位置rf和終端速度Vf的k(k≤6)個等式約束組成:
φ(rf,Vf)=0
(5)
為節(jié)省燃料,推力方向1T可通過求解使得下面指標(biāo)最小的最優(yōu)控制問題來獲得:
(6)
注意式(6)中以當(dāng)前瞬時時刻為0時刻;τf=tf/tref,tf為終端時刻。整個制導(dǎo)的思路是:在每一個制導(dǎo)解算周期內(nèi),通過迭代求解式(3)~式(6)組成的最優(yōu)控制問題來獲得最優(yōu)推力方向1T,隨著飛行時間的增加,實際位置與終端約束的位置越來越靠近,因此對引力加速度的近似誤差也會越來越小。
根據(jù)最優(yōu)控制理論,選擇如下哈密頓函數(shù):
H0+TF
(7)

(8)
注意式(8)中的求導(dǎo)運算同樣是相對于無量綱化時間τ而言的。
設(shè)pr的初值為pr0,當(dāng)前瞬時時刻的位置和速度分別為r0和V0,根據(jù)式(8)有
(9)
式(9)為關(guān)于pV和-pr/ω的線性微分方程,其解為
(10)
將式(10)進一步展開可得
(11)
根據(jù)式(3)有
(12)
定義
(13)
(14)
式中:
則式(12)的解可寫為
(15)
根據(jù)數(shù)值積分公式,有
(16)
(17)
式中:各ic和is的值均可根據(jù)式(11)來確定。因此有

(18)
V(τ)=-ωsin(ωτ)r0+cos(ωτ)V0+cos(ωτ)·

(19)
可見,在當(dāng)前瞬時時刻位置和速度確定的前提下,pr(τ)、pV(τ)、r(τ)和V(τ)均為協(xié)態(tài)變量初值pr0和pV0的函數(shù),而實際最終的位置和速度還取決于τf,一共有7個未知變量,如果能夠構(gòu)造關(guān)于pr0、pV0和τf的7個方程,則求解這個方程就能獲得pV0,從而得到最優(yōu)推力方向。
2 約束方程構(gòu)造
在發(fā)動機推力大小T不可調(diào)的前提下,理論上只能滿足5個終端約束,對于航天器入軌來說,通常選取軌道根數(shù)來描述入軌條件,形成以軌道根數(shù)描述的終端約束條件。經(jīng)典的6個軌道根數(shù)為半長軸a、偏心率e、軌道傾角i、升交點赤經(jīng)Ω、近地點幅角w、真近點角f,對應(yīng)的目標(biāo)量均用下角標(biāo)T表示,通常不約束真近點角,即選取的5個終端約束為半長軸aT、偏心率eT、軌道傾角iT、升交點赤經(jīng)ΩT和近地點幅角wT。
2.1 半長軸約束
由二體問題中的活力公式可知
(20)

(21)
因此,半長軸的終端約束為
(22)
2.2 偏心率約束
φ2(rf,Vf)=
(23)
2.3 軌道傾角約束


(24)
顯然,在慣性系中h方向的單位矢量為
(25)
(26)

2.4 升交點赤經(jīng)約束
根據(jù)2.3小節(jié)中的分析,升交點赤經(jīng)約束為
(27)
2.5 近地點幅角約束
偏心率矢量e在地心慣性坐標(biāo)系中的分量滿足:
(28)
從而有
(29)
(30)
從而有
(31)
結(jié)合式(28)、式(29)和式(31)可知,近地點幅角約束為
(32)
式中:
φ1~φ5構(gòu)成了關(guān)于rf和Vf的5個終端約束,為求解協(xié)態(tài)變量初值和飛行時間,還需要2個終端約束構(gòu)成完整的約束方程。
2.6 第6個約束方程

(33)
式中:zp為拉格朗日乘子向量,為避免數(shù)值求解困難,需要消去zp。通常的方法是求解下述方程:
(34)
得到關(guān)于rf和Vf的解y,則有
yTpf=0
(35)
式(35)構(gòu)成了第6個約束方程。
上述方法雖然直觀,但是實際求解式(34),特別是獲得y的解析表達式并不容易,因此這里考慮另外一種思路。
由于位置速度和6個軌道根數(shù)之間可以互相轉(zhuǎn)換,rf和Vf可以表示為軌道根數(shù)的形式,因此φ1~φ5也可以表示成軌道根數(shù)的函數(shù),即令η=[aeiΩwf]T,則終端約束可寫為
(36)
(37)
令y=?xf/?ff,則由式(35)可知第6個約束方程為
(38)

(39)

(40)
(41)
對式(39)微分可得
(42)
(43)

(44)

(45)
(46)
從而可知
(47)
比較式(43)和式(47)可得
(48)

(49)
進一步考慮無量綱位置和速度的情形,由式(48)和式(49)可得
(50)
(51)
因此有
(52)
從而式(38)可寫為
(53)
式(53)即為第6個約束方程。
2.7 第7個約束方程
由最優(yōu)控制原理,協(xié)態(tài)方程可寫為
(54)
(55)
可見,哈密頓函數(shù)也只是每一項進行了同樣的縮放,因此不會影響最優(yōu)推力方向的求解。因此,這里考慮針對協(xié)態(tài)變量的尺度設(shè)計第7個約束方程如下(選擇不唯一):
(56)

注:在獲得7個完整約束方程后,在每一次制導(dǎo)計算周期內(nèi)利用牛頓迭代法對方程進行求解獲得協(xié)態(tài)變量初值,即可得到最優(yōu)推力方向。在仿真程序中,牛頓迭代法求解方程組所需要的雅可比矩陣利用數(shù)值分析中常用的差商法獲得,因此計算量要大于傳統(tǒng)的迭代制導(dǎo)方法。與迭代制導(dǎo)類似,在一開始的幾次制導(dǎo)計算周期內(nèi)需要的迭代次數(shù)較多,后面基本迭代1~2次即可得到解。對于第3節(jié)仿真中的例子,在箭載計算機運行中程序時,完成一次制導(dǎo)指令解算所需的時間大約為5 ms。
3 仿真驗證
為驗證所提方法的有效性,針對航天器某一次變軌任務(wù)進行仿真驗證。設(shè)置航天器的初始質(zhì)量為8 680.554 8 kg,主發(fā)動機推力的大小為6 500 N,比沖為3 095 m/s,初始和目標(biāo)軌道根數(shù)如表1所示。
假設(shè)航天器的初始姿態(tài)已經(jīng)調(diào)整到合適位置,從初始位置開始即進行制導(dǎo)解算,不考慮前段累積偏差。仿真計算步長選為10 ms,考慮J2引力攝動項,終止姿態(tài)角迭代計算的條件選為剩余分析時間小于 5 s 時,關(guān)機條件為剩余飛行時間小于0.1 s時。

表1 航天器的初始和目標(biāo)軌道根數(shù)Table 1 Initial and target orbital elements of spacecraft
針對表1中的數(shù)據(jù),將本文方法與文獻[20]中方法進行對比仿真,制導(dǎo)結(jié)果如圖1所示,本文方法的實際飛行時間為168.130 0 s,文獻[20]中方法的實際飛行時間為168.670 0 s。
由圖1中的仿真結(jié)果可以看出,在整個制導(dǎo)過程中,兩種方法均能保證剩余時間逐漸減小到0,除真近點角外的5個軌道根數(shù)誤差最終也趨于0,制導(dǎo)結(jié)束后的偏差數(shù)據(jù)如表2所示。
由表2可知,2種方法均能保證航天器最終到達的軌道與目標(biāo)軌道根數(shù)的偏差在容許范圍內(nèi),且與文獻[20]中方法相比,本文方法的軌道根數(shù)偏差更小,如果需要進一步減小某個軌道根數(shù)偏差,可對該軌道根數(shù)的約束方程進一步進行加權(quán),如若需要進一步減小偏心率偏差,則可根據(jù)式(23),在程序中令φ2=γφ2,γ為大于1的數(shù),如取為10、100等。
進一步,假設(shè)推力和比沖等各偏差均服從正態(tài)分布,對應(yīng)的3σ偏差值如表3所示。進行1 000次打靶仿真,最終得到的軌道根數(shù)偏差如圖2所示。

圖1 本文方法和文獻[20]中方法的制導(dǎo)結(jié)果仿真對比Fig.1 Simulation comparion of guidance results between proposed method and method in Ref.[20]

方法半長軸偏差/m偏心率偏差軌道傾角偏差/(°)升交點赤徑偏差/(°)近地點幅角偏差/(°)本文方法-22.0731-9.7929×10-5-4.9592×10-52.7294×10-51.5200×10-2文獻[20]方法345.3752-1.7219×10-4-7.6690×10-52.0290×10-42.2500×10-2
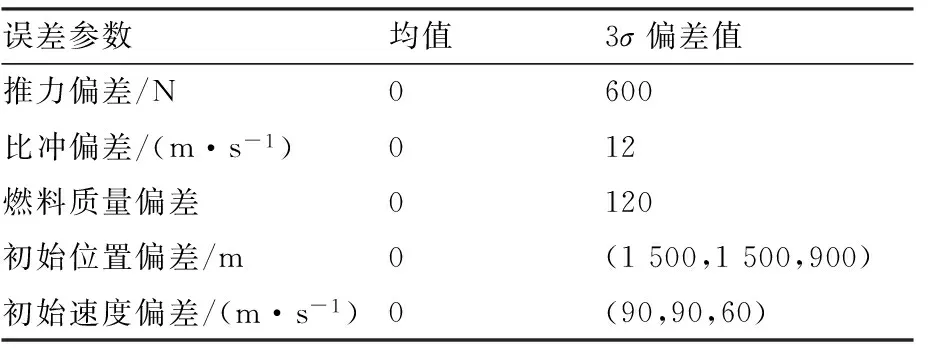
表3 誤差參數(shù)3σ偏差值Table 3 3σ deviation values of error parameters
從圖2可以看出,對于表3中的誤差條件,半長軸偏差最大為200 m,偏心率偏差最大為8.0×10-4,軌道傾角和升交點赤經(jīng)偏差最大為4×10-4(°),近地點幅角偏差最大為0.15°。此外,各軌道根數(shù)偏差參數(shù)均集中在零附近,仿真結(jié)果表明本文所提制導(dǎo)算法對于偏差具有一定的適應(yīng)性。
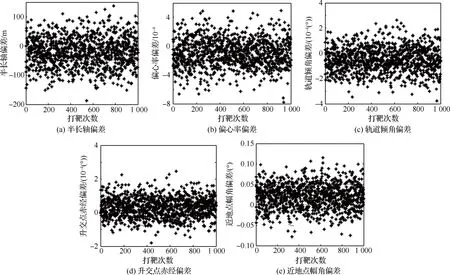
圖2 軌道根數(shù)統(tǒng)計偏差Fig.2 Statistical error of orbital element
4 結(jié) 論
本文直接從地心慣性坐標(biāo)系下航天器的運動模型出發(fā),將制導(dǎo)指令求解問題轉(zhuǎn)化為約束方程組的構(gòu)造與求解問題,并進行了相應(yīng)的仿真分析。
1) 不需要假設(shè)制導(dǎo)指令角的形式,適用范圍大于傳統(tǒng)的迭代制導(dǎo)。
2) 從最優(yōu)控制理論出發(fā)求解制導(dǎo)指令,具有一定的最優(yōu)性。
3) 所提方法能夠保證航天器最終到達的軌道與目標(biāo)軌道根數(shù)的偏差在容許范圍內(nèi),且對于偏差具有一定的適應(yīng)性。
[1] CHEN S Y, XIA Q L. A Multiconstrained ascent guidance method for solid rocket-powered launch vehicles[J]. International Journal of Aerospace Engineering, 2016(1):1-11.
[2] QUADRELLI M B, WOOD L J, RIEDEL J E, et al. Guidance, navigation, and control technology assessment for future planetary science missions[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(7): 1165-1186.
[3] VACHON A, DESBIENS A, GAGNON E, et al. Launch ascent guidance by discrete multi-model predictive control[J]. Acta Astronautica, 2014, 95: 101-110.
[4] HULL D G, HARRIS M W. Optimal solutions for quasiplanar ascent over a spherical Moon[J]. Journal of Guidance, Control and Dynamics, 2012, 35(4): 1218-1223.
[5] LU P, FORBES S, BALDWIN M. A versatile powered guidance algorithm[C]∥AIAA Guidance, Navigation, and Control Conference. Reston, VA: AIAA, 2012: 4843-4858.
[6] JEB S O, JOHN H W, TANNEN S V, et al. Space launch system ascent flight dontrol design[DB/OL].http:∥ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20140008731.pdf.
[7] LAN X J, LIU L, WANG Y J. Online trajectory planning and guidance for reusable launch vehicles in the terminal area[J]. Acta Astronautica, 2016, 118: 237-245.
[8] HALBE O, RAJA R G, PADHI R. Robust reentry guidance of a reusable launch vehicle using model predictive static programming[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(1): 134-148.
[9] SONG E J, CHO S, ROH W R. A comparison of iterative explicit guidance algorithms for space launch vehicles[J]. Advances in Space Research, 2015, 55(1): 463-476.
[10] TIAN B, FAN W, SU R, et al. Real-time trajectory and attitude coordination control for reusable launch vehicle in reentry phase[J]. IEEE Transactions on Industrial Electronics, 2015, 62(3): 1639-1650.
[11] LU B, CUI N, FU Y, et al. Closed-loop atmospheric ascent guidance based on finite element method[J]. Aircraft Engineering and Aerospace Technology: An International Journal, 2015, 87(5): 393-401.
[12] 陳新民, 余夢倫. 迭代制導(dǎo)在運載火箭上的應(yīng)用研究[J]. 宇航學(xué)報, 2003, 24(5): 484-489.
CHEN X M, YU M L. Study of iterative guidance application to launch vehicles [J]. Journal of Astronautics, 2003, 24(5): 484-489 (in Chinese).
[13] 茹家欣. 液體運載火箭的一種迭代制導(dǎo)方法[J]. 中國科學(xué)E輯:技術(shù)科學(xué), 2009, 39(4): 696-706.
RU J X. An iterative guidance method for liquid launch vehicle[J]. Science in China Series E: Technological Sciences, 2009, 39(4): 696-706 (in Chinese).
[14] 池賢彬, 岳曉奎, 李鵬. 基于凸優(yōu)化的自主交會迭代制導(dǎo)方法[J]. 中國空間科學(xué)技術(shù), 2014(1): 26-34.
CHI X B, YUE X K, LI P, et al. Iterative guidance method of autonomous rendezvous based on convex optimization[J]. Chinese Space Science & Technology, 2014(1): 26-34.
[15] LU P, GRIFFIN B J, DUKEMAN G A, et al. Rapid optimal multiburn ascent planning and guidance[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(6): 1656.
[16] LU P, SUN H, TSAI B. Closed-loop endoatmospheric ascent guidance[J]. Journal of Guidance Control and Dynamics, 2003, 26(2): 283-294.
[17] LU P, PAN B. Highly constrained optimal launch ascent guidance[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(2): 404-414.
[18] 傅瑜, 陳功, 盧寶剛,等. 基于最優(yōu)解析解的運載火箭大氣層外自適應(yīng)迭代制導(dǎo)方法[J]. 航空學(xué)報, 2011, 32(9): 1696-1704.
FU Y, CHEN G, LU B G, et al. A vacuum adaptive iterative guidance method of launch vehicle based on optimal analytical solution[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(9): 1696-1704 (in Chinese).
[19] 鄭旭, 高長生, 陳爾康,等. 一種基于大氣層外解析動力學(xué)模型的最優(yōu)迭代制導(dǎo)方法[J]. 西北工業(yè)大學(xué)學(xué)報, 2016, 34(6):1093-1100.
ZHENG X, GAO C S, CHEN E K, et al. An optimal iterative guidance method based on exoatmospheric analytical dynamic model [J]. Journal of Northwestern Polytechnical University, 2016, 34(6): 1093-1100 (in Chinese).
[20] 鄧逸凡, 李超兵, 王志剛. 一種基于軌道要素形式終端約束的航天器空間變軌迭代制導(dǎo)算法[J]. 航空學(xué)報, 2015, 36(6): 1975-1982.
DENG Y F, LI C B, WANG Z G. An iterative guidance algorithm using orbital elements as terminal constraints for spacecraft orbit transfer [J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(6): 1975-1982 (in Chinese).
[21] 李超兵, 王晉麟, 李海. 一種基于多終端約束的最優(yōu)制導(dǎo)方法[J]. 中國空間科學(xué)技術(shù), 2016, 36(5): 9-17.
LI C B, WANG J L, LI H. An optimal guidance method based on multiple terminal constraints[J]. Chinese Space Science and Technology, 2016, 36(5): 9-17 (in Chinese).
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56