衛星激光測距系統中圖像處理子系統設計
2018-04-27 03:42:34韓興偉
激光與紅外 2018年4期
關鍵詞:系統
張 楠,韓興偉
(中國科學院國家天文臺長春人造衛星觀測站,吉林 長春 130117)
1 引 言
衛星激光測距的原理是通過精確測量激光脈沖在地面觀測站和衛星之間的往返時間間隔,從而計算出目標到地面觀測站的距離。衛星激光測距技術是大地空間測量的主要技術之一,在人造衛星或航天器的精密測定、精密時間比對等方面有著重要的科學應用,尤其在地球動力學和大地測量學領域有著重要貢獻[1-2]。衛星激光測距技術涵蓋多個學科領域,在各學科發展的推動下,衛星激光測距技術主要朝著提高測量精度和測距系統的自動化水平這兩個方向發展[3-4]。
通過軟硬件的協同配合來代替人的部分操作,最終實現設備的穩定工作和長期運行,能夠大大降低人力資源,因此對衛星激光測距系統的自動化研究具有積極的意義和實用價值。本文介紹了一套用于衛星激光測距系統的圖像處理子系統,該系統集圖像采集、存儲、顯示、目標定位功能于一體,通過圖像處理方法,分別識別出衛星和激光后向散射光尖,為控制系統提供根據偏差量信息,控制系統依據偏差量修正衛星到視場中心閉環跟蹤,同時將激光出光方向鎖定到視場中心,實現對激光發射光束和望遠鏡指向的自動調整。通過實驗測試,該子系統操作方便,運行穩定,有助于提高衛星激光測距系統的自動化水平。
2 系統框架
本文設計的圖像處理子系統結構如圖1所示。硬件部分負責獲取觀測衛星與激光光束圖像,并為算法提供計算機平臺;軟件部分主要實現實時圖像采集、實時計算激光束光尖和衛星的位置坐標數據,并通過網絡通訊的方式將激光光束光尖位置偏差量和衛星位置偏差量發送給控制系統,由控制系統根據偏差量完成后續的激光束指向調整以及目標預報修正。
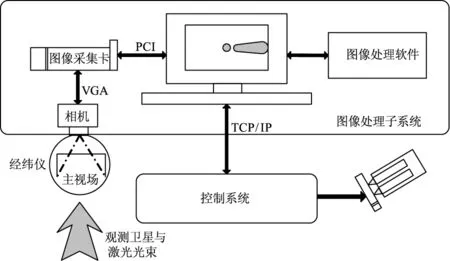
圖1 系統結構圖Fig.1 Block diagram of the system
如圖1所示,硬件部分包括CCD相機、圖像采集卡以及計算機。相機與圖像采集卡組成圖像采集設備,計算機與采集卡相連接,作為圖像的存儲、處理和顯示設備,負責圖像采集、存儲、目標提取功能,同時負責與控制系統進行通訊。
軟件部分是在VC框架下進行模塊化開發,其結構如圖2所示,主要可以分為:圖像采集、數據處理和數據傳輸3個部分。圖像采集模塊,在連接相機與圖像采集卡并且啟動后,實時采集激光光束及觀測衛星圖像,并通過PCI總線發送給圖像處理計算機;數據處理模塊對實時采集的原始圖像進行圖像處理,并計算衛星及光尖的位置坐標,處理后的圖像與計算得到的坐標數據均在人機交互界面上顯示;數據傳輸模塊通過網絡將衛星及光尖的位置偏差反饋給控制系統。衛星與光尖的識別均可以根據需求選擇自動識別或手動選擇兩種方法。
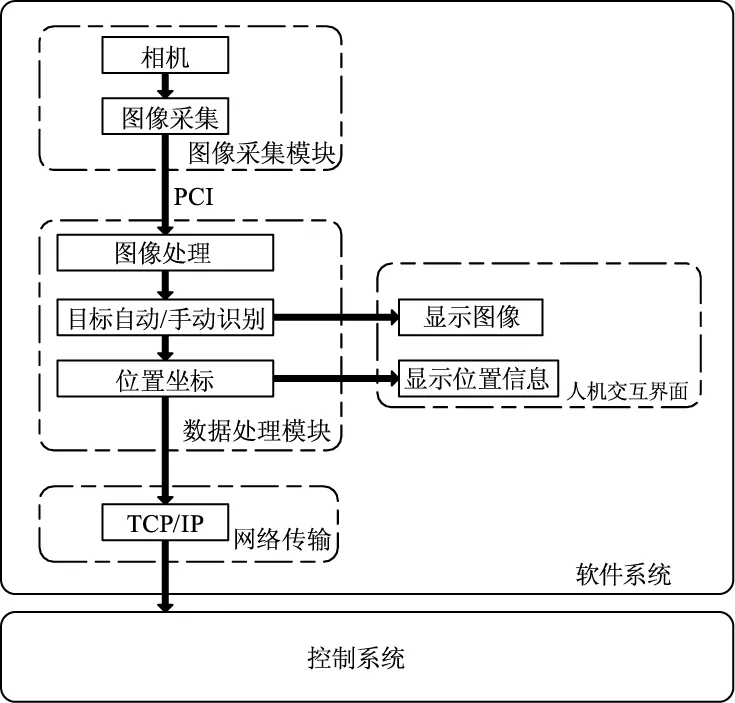
圖2 軟件系統框圖Fig.2 Block diagram of the software
3 圖像處理算法
對采集到的圖像進行處理,主要包括目標識別和目標定位兩部份,主要圖像處理算法流程如圖3所示。
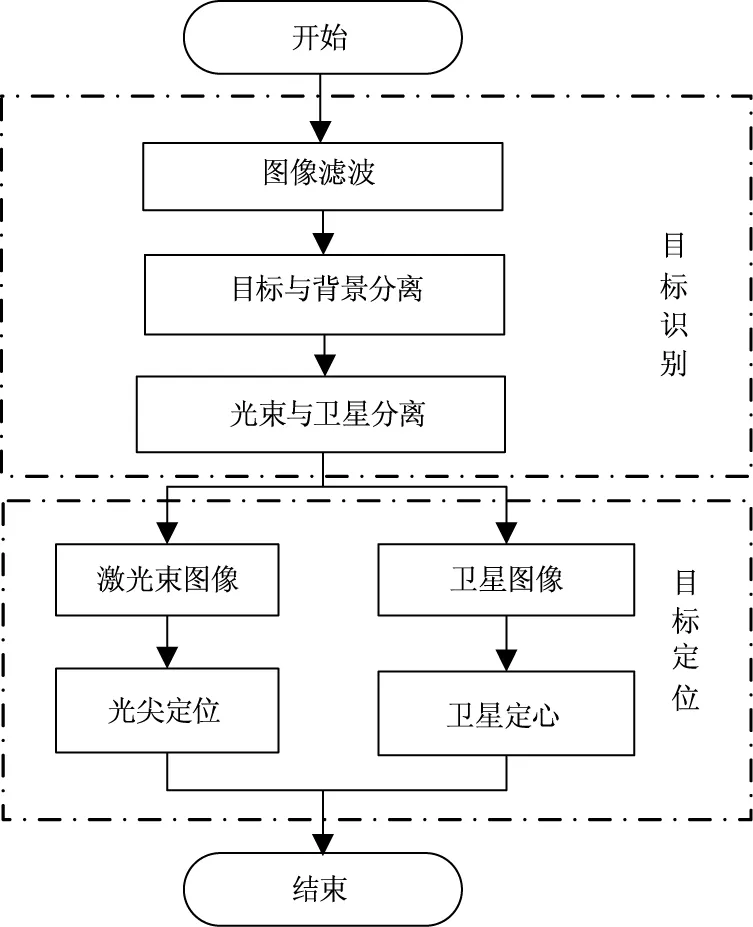
圖3 圖像處理算法流程Fig.3 Program flowchart of the image processing method
為了防止圖像中夾雜噪聲對目標識別的影響,首先要對對原始圖像進行濾波去噪。本文采用Butterworth低通濾波器,該濾波器的通帶和阻帶間沒有明顯的躍變,處理后圖像的模糊程度會減少,所以非常適合圖像的預處理工作。
3.1 目標識別
目標識別實際上是一個圖像分割的過程,首先將目標同背景分離開,然后將衛星與激光光束分離開。
結合圖像特點和算法復雜程度,采用全局閾值分離目標與背景。全局閾值的選取采用基于統計的閾值算法[5-6],計算公式如式(1)所示:
T=V+α(P-V),0<α<1
(1)
其中,V為圖像的平均灰度;P為峰值灰度;α為比例系數。根據實驗測試,α選在0.3左右比較合適。
這種自適應閾值求取方法利用圖像的峰值灰度與平均灰度進行比較得到的灰度閾值便可以檢測出目標,能夠隨背景變化及目標信號大小自動調整閾值大小。
獲取到閾值后,采用連通域算法[7]對灰度大于全局閾值的像素點進行聚類識別,具體步驟如下:
(1) 從左至右,從上至下逐個像素掃描;
(2) 如果像素點的灰度值大于閾值T,則:
①如果左前一點和上一點均為背景,則當前點加新標記;
②如果左前一點或上一點有一個標記,則復制這個標記。
③如果左前一點和上一點均為已加標記,則當前點復制左點標記。
(3)重復步驟(2)直到掃描完圖像。
(4)將標記相同的像素點合并。
經過連通域分割處理后,圖像中的目標表現為相鄰的具有相同標記點的像素點的集合。最后根據衛星與激光光束的面積差異[8],進行進一步的目標分離,分別得到衛星圖像與激光束圖像,供后續處理使用。
3.2 目標定位
對于衛星定心,采用了帶閾值的質心法[9]計算衛星質心,計算公式如式(2)所示。該方法相當于在原圖像中去除背景,僅對大于背景閾值T的像素點求取質心,相比傳統的質心法具有更高的精度。
(2)
其中,

(3)
式(2)、(3)中,f(x,y)為原始圖像灰度值,F(x,y)為經過修正的圖像灰度值,T為所取得閾值。
對于激光光尖定位,首先采用邊界跟蹤法[10]提取激光光束的邊緣。邊界跟蹤的基本方法是:邊緣跟蹤從圖像左上角開始逐像素掃描,當遇到邊緣點時,則開始順序跟蹤,直到其后續點再沒有新的后續點。邊界跟蹤對于邊界點的判斷精確,跟蹤后產生的輪廓邊緣寬度只有一個像素,而且整個邊界連續無中斷。
在獲得激光束邊緣輪廓后,用最小二乘法進行直線擬合,上下邊緣各自可以擬合出一條直線,計算2條直線的交點,近似為激光束光尖坐標[11]。
4 測試結果
根據第2 、3節介紹的圖像處理子系統的總體框架和具體的處理算法,以Windows7 操作系統為開發環境,用VC++和Qt作為開發工具,采用模塊化設計思想進行相關功能模塊的開發,完成了衛星激光測距圖像處理子系統的軟件程序,系統的軟件界面如圖4所示。

圖4 圖像處理系統軟件界面Fig.4 Screenshot of software interface
本圖像處理子系統現已投入實際應用,與衛星激光測距系統配合測試結果表明,該系統完成了預定的功能,操作方便,運行穩定。給出了本系統采集的圖像和進行目標定位的結果,如圖5所示。
圖像處理子系統應用于實際激光測距系統,偏差量誤差在3"以內,可以滿足衛星激光測距系統的精度要求,具有實際意義和應用價值。
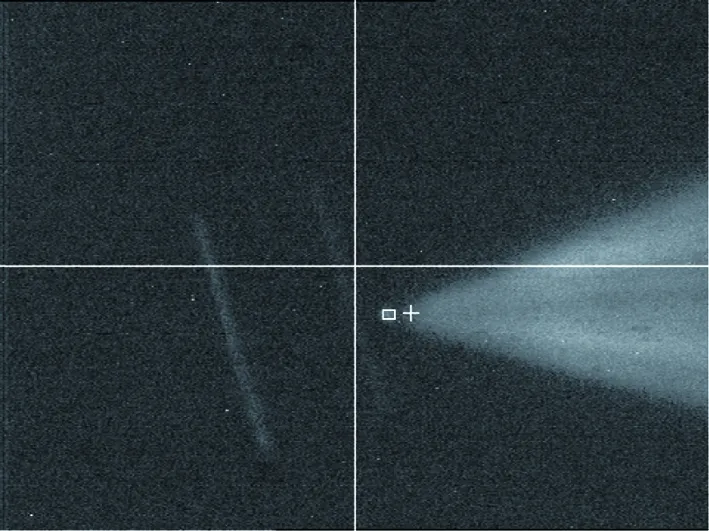
圖5 目標定位圖Fig.5 Result of target location
5 結束語
本文根據實際應用的需求,實現了一套應用于衛星激光測距系統的圖像處理子系統。根據衛星激光測距系統所獲得圖像的特點,采用圖像處理技術來解算衛星和激光束光尖相對于視場中心的位置偏差量,并轉換成跟蹤偏差值,進而由控制系統依據此偏差值重新引導望遠鏡進行跟蹤并控制光束指向目標。
在衛星激光測距系統中引入圖像處理方法,在一定程度上改善了現有衛星激光測距系統中目標預報偏差和激光不能精確指向的問題,減少了人工操作的工作量,提高了衛星激光測距系統的精度和工作效率。該圖像處理子系統穩定可靠,滿足衛星激光測距系統對測量數據的要求。
參考文獻:
[1] LIU Yang.Research on comprehensive pointing model of telescope based on SLR tracking data [D].Changchun:Changchun Observatory,National Astronomical Observatories,CAS,2012.(in Chinese)
劉洋.利用SLR觀測數據修正經緯儀指向模型的研究[D].長春:中國科學院國家天文臺長春人造衛星觀測站,2012.
[2] SHAO Baodong.The development of control software in SLR system[D].Changchun:Jilin University,2012.(in Chinese)
邵寶東.衛星激光測距控制軟件的開發 [D].長春:吉林大學,2012.
[3] HUANG Baoli.Research of control system improvement based on digital image processing technology for SLR [D].Changchun:Changchun Observatory,National Astronomical Observatories,CAS,2014.(in Chinese)
黃寶利.基于數字圖像處理技術的衛星激光測距系統改進的研究[D].長春:中國科學院國家天文臺長春人造衛星觀測站,2014.
[4] DONG Xue.Research of high repetition space debris laser ranging system[D].Changchun,Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Science,2014.(in Chinese)
董雪.高重復頻率空間碎片激光測距系統研究[D].長春:中國科學院長春光學精密機械與物理研究所,2014.
[5] LIU Gang,SU Xiuqin,HU Xiaodong,et al.Real-time image tracking based on adaptive threshold in high speed TV [J].Acta Photonica Sinica,2005,34(8):1262-1265.(in Chinese)
劉剛,蘇秀琴,胡曉東,等.高速電視下基于自適應閾值的實時圖像跟蹤[J].光子學報,2005,34(8):1262-1265.
[6] SUN Rongyu,ZHAO Changyin.An adaptive threshold method for improving astrometry of space debris CCD images.Advances in Space Research,2014,53:1664-1674.
[7] ZHANG Guangjun.Star identification Beijing:National Defense Industry Press,2011.(in Chinese)
張廣軍.星圖識別[M].北京:國防工業出版社,2011.
[8] HUANG Baoli,HAN Xingwei,ZHANG Nan,et al.Axis correction of satellite laser ranging system based on image processing technique [J].Laser & Infrared,2014,44(7):715-719.(in Chinese)
黃寶利,韓興偉,張楠,等.衛星激光測距系統的指向偏差修正[J].激光與紅外,2014,44(7):715-719.
[9] ZHANG Yigong,LI Binhua,YANG Lei,et al.An image processing system for a multi-function astronomical theodolite[J].Astronomical Research and Technology,2014,11(1):65-71.(in Chinese)
張益恭,李彬華,楊磊,等.多功能天文經緯儀圖像處理系統[J].天文研究與技術,2014,11(1):65-71.
[10] LV Yunfei.An object boundary following algorithm[D].Dalian:Dalian Maritime University,2014.(in Chinese)
呂云飛.一種目標邊界跟蹤算法[D].大連:大連海事大學,2014.
[11] WANG Yuanyuan,LIU Yanhong,HU Yuanhang,et al.Research on image processing methods for measuring laser pointing deviation in satellite laser ranging system [J].Journal of Northeast Normal University:Natural Science Edition,2012,44(4):66-70.(in Chinese)
王媛媛,劉艷紅,胡元航,等.衛星激光測距系統中激光指向偏差測量的圖像處理方法研究[J].東北師大學報:自然科學版,2012,44(4):66-70.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32