車載充電機的無模型功率控制研究
2018-05-02 12:28:04陳乾輝吳德剛
許昌學院學報 2018年4期
陳乾輝,吳德剛
(商丘工學院 機械工程學院,河南 商丘 476000)
電動汽車電池技術已經成為衡量電動汽車品質的核心技術之一,作為連接電池系統與電網的接口,電池充電器是實現電池高效、快速充電的核心[1].目前,最常見的兩種電池充電器是車載充電機和充電樁[2].車載充電機一般采用功率因數校正(Power factor correction,PFC) AC/DC變換器和全橋DC/DC變換器級聯的結構形式,前端PFC AC/DC變換器不僅能將電網的AC轉換為DC,還可以實現PFC,后端則可實現電池系統的智能充電[3,4].然而,由于PFC AC/DC變換器的性能直接影響充電機接入電網后電能的質量(比如多次諧波使電網電壓畸變,設備損壞等)、電池組的充電效率、電池的壽命等[5,6],因此,如何實現PFC AC/DC變換器的高性能控制,成為我們亟待解決的難題.
目前,PFC AC/DC變換器的控制策略主要有平均電流控制、非線性控制、基于微分平坦控制的PFC AC/DC變換器功率控制方法、無模型控制(Model-free control,MFC)方法等[7,8].在采用這些控制方法的過程中,存在抗干擾能力弱、動態特性差、模型的不確定性、未知擾動的動、靜態性能的魯棒性,針對上述控制方法存在的缺陷,提出了車載充電機PFC AC/DC 變換器的無模型功率控制(Model-free power control,MFPC),該方法根據PFC AC/DC變換器的輸入、輸出(I/O)建立超局部模型(Super-partial Model,SPM),進而設計相應控制器,該控制器控制結構簡單,且對系統內外干擾、測量噪聲、模型動態等有很強的魯棒性.
1 無模型控制
將一單輸入單輸出(Single input single output,SISO)非線性系統的數學模型用SPM表示為
y(v)=F+αu,
(1)
其中,y——系統輸出變量;y(v)——y的v階微分值;v——大于等于1的整數,一般選1或2;u——系統輸入變量;F——SPM中的未知部分,包括未知參數和內外部干擾;α——不具備物理意義的常數,保證αu和yv的幅值在同一數量級.
取v=1,由式(1)可得SISO系統的SPM,即
(2)
基于SPM的無模型控制器可表示為
(3)

(4)
由式(3)和(4)可知,MFC系統可表示為
(5)
其中,e=y*-y.由式(5)可知,ζ選擇越恰當,系統輸出越穩定.
若ζ選用比例控制,則無模型控制器可表示為
(6)
其中,Kp——比例系數.
由于未知部分的準確性決定系統的控制精度,當時間很小時,F近似為常數,因此,式(2)可近似為
(7)
其中,θ——分段常函數.
對式(7)做拉普拉斯變換,可得:
(8)
其中,y0——y在采樣區間的初始值.
對等式(8)兩側求s的微分,可得:
(9)
為了濾除噪聲,需在等式(9)兩側同乘s-2,可得:
(10)


(11)
其中,Ts——采樣頻率;nF——窗口序列長度;[0,nFTs]——非常短的滑動的時間窗口.
特別注意,u[0],u[1],…,u[nF]和y[0],y[1],…,y[nF]分別為系統I/O的采樣值.
nF和α選擇越恰當,F的預估越準確,無模型控制器的控制能力越強.若輸出參考值含有噪聲,則輸出參考值的微分可通過式(12)獲取.
(12)
2 PFC AC/DC 變換器的MFPC
根據PFC AC/DC 變換器的工作原理,選擇恰當的I/O,根據I/O構建PFC AC/DC 變換器的SPM,并在PFC AC/DC 變換器的SPM基礎上,設計無模型電流-功率控制器,實現PFC AC/DC 變換器MFPC.
車載充電機前端PFC AC/DC 變換器的狀態方程為
(13)
該系統的平坦輸出為輸入功率pin與占空比d的關系為
(14)
其中,
為實現變換器的MFPC,以pin為系統輸出,d為系統輸入,由式(2)可得PFC AC/DC 變換器的SPM,即
(15)
由式(14)可知,SPM的未知部分包含 中的各種內外部干擾,為實現系統控制的精確性,α與B的取值應相似.
由PFC AC/DC 變換器SPM獲得無模型電流-功率控制器,即
(16)

(17)
(18)

(19)
為實現對系統狀態的準確估計,α應時刻隨系統變化,即
α=c|vin|Vo,
(20)
其中,c是與電感值L相關的常數.
3 系統建模與仿真
根據上述車載充電機前端PFC AC/DC 變換器的控制器的設計,建立MFPC的PFC AC/DC 變換器的仿真模型,以電阻模擬車載充電機的恒流充電過程,仿真模型如圖1所示.

圖1 MFPC的PFC AC/DC 變換器的仿真模型
3.1 α仿真驗證
給定控制器參數:nD=15,nF=15,Kp=le5,若α為變值,c=1e-4,若α為恒值,c=1e-9.α在恒值和式(20)所描述系統變值兩種情況下,驗證系統的控制能力.
給定參數:vin(rms)=220 V,P0=2 KW.
圖2 恒α時
圖3 恒α時和pin
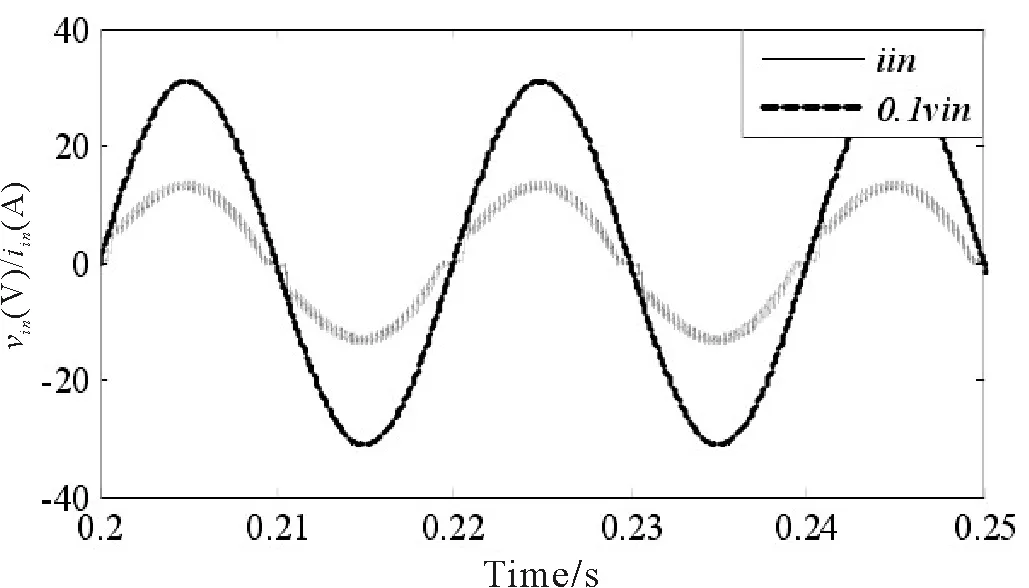
圖4 恒α時vin和iin
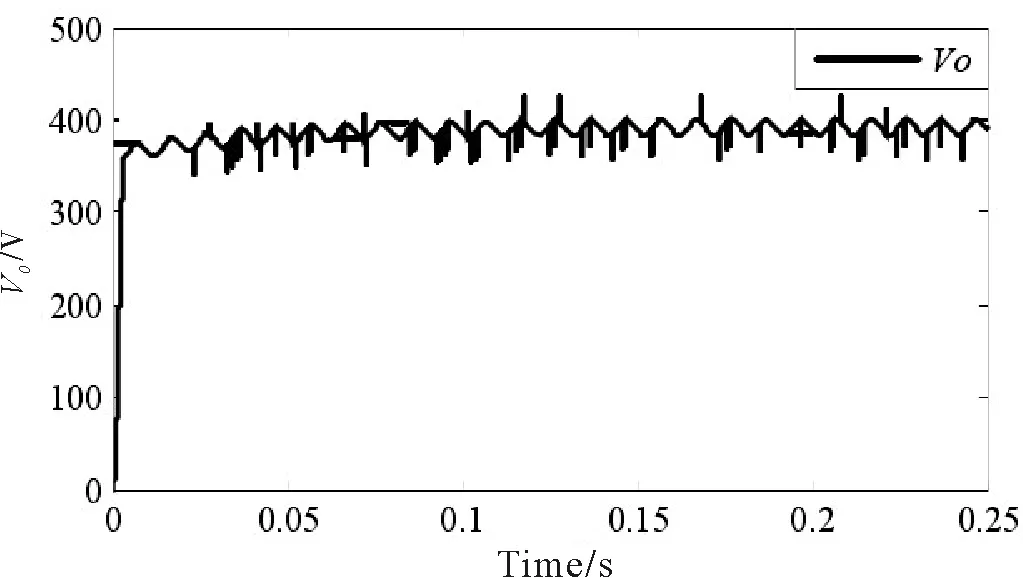
圖5 恒α時V0
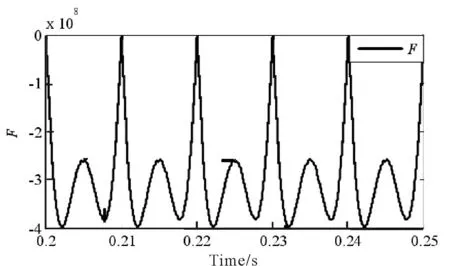
圖6 變α時
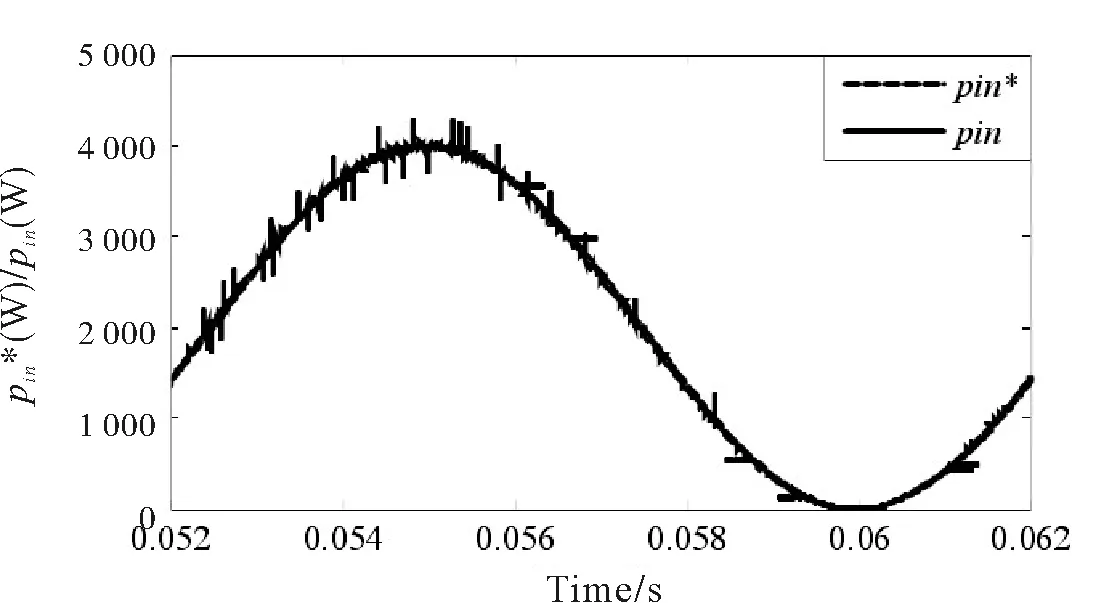
圖7 變α時和pin
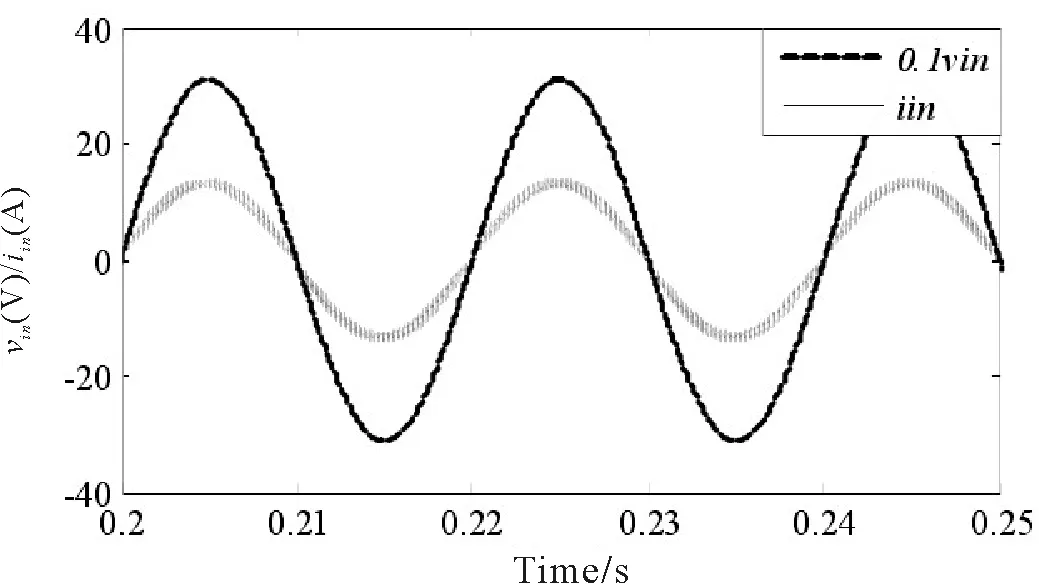
圖8 變α時vin和iin
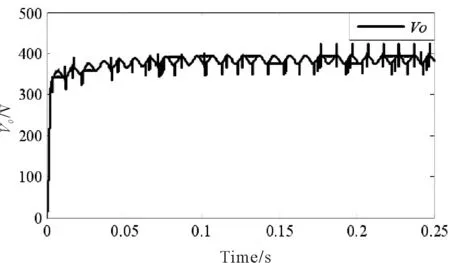
圖9 恒α時V0
3.2 抗干擾實驗、仿真驗證
給定參數:vin(rms)=220 V,P0=1.7 KW,負載0.2 s后突變到2 KW.
MFPC的車載充電機 PFC AC/DC 變換器的iin如圖10所示,V0如圖11所示.仿真結果表明:MFPC的PFC AC/DC 變換器的iin在負載突增時,能瞬時到達新穩態;V0從327 V經過短時電容恒流充電平穩到達385 V.
給定參數:vin(rms)=220 V,P0=2 KW,測試電容由990 μF降到660 μF.
MFPC的車載充電機 PFC AC/DC 變換器的V0如圖12所示.測試電容變化時,MFPC的變壓器V0在0.035 s后到達新穩態,具有很強的魯棒性.
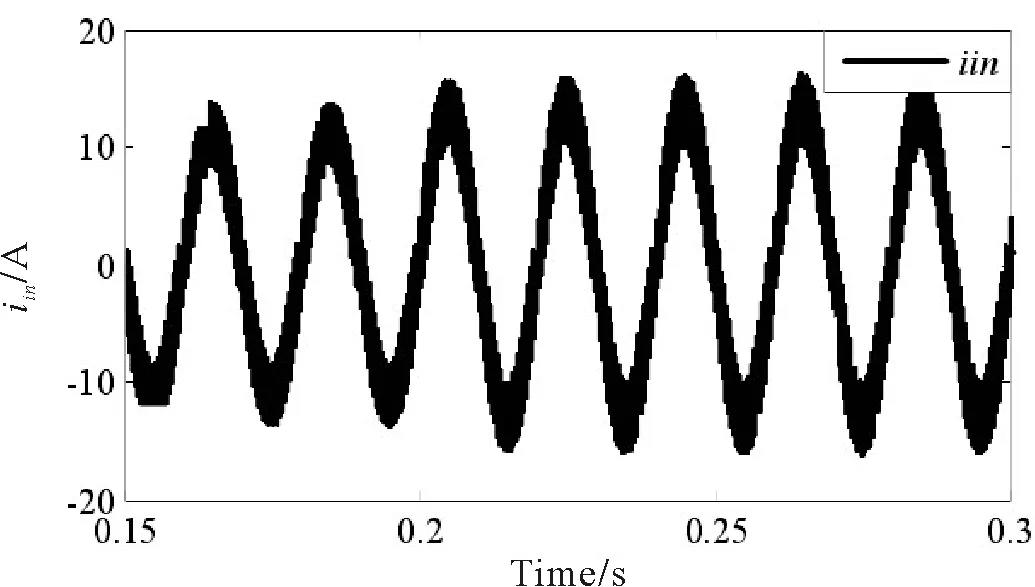
圖10 負載突變時MFPC下的iin
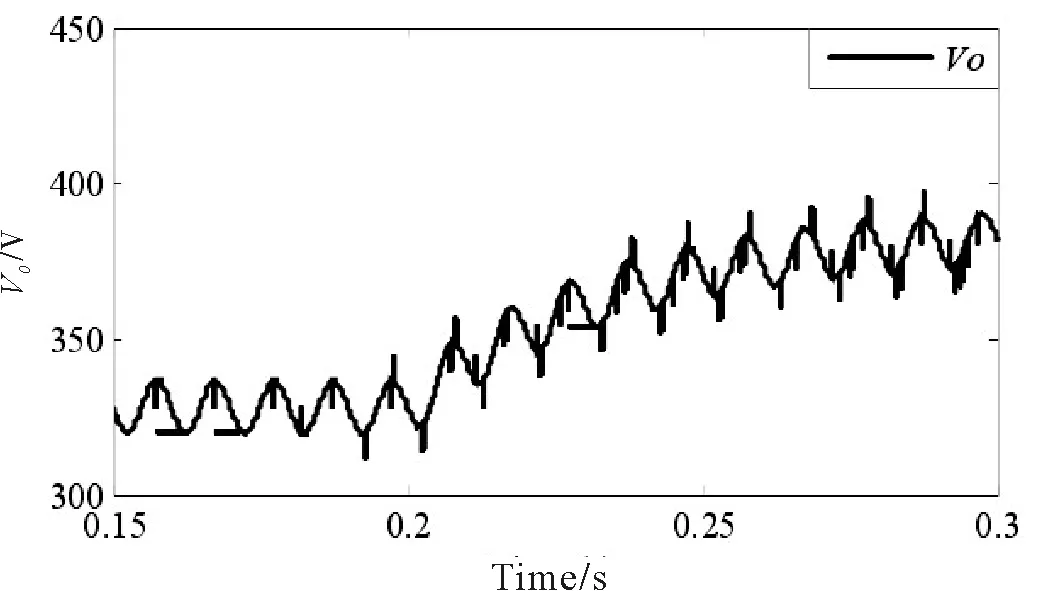
圖11 負載突變時MFPC下的V0
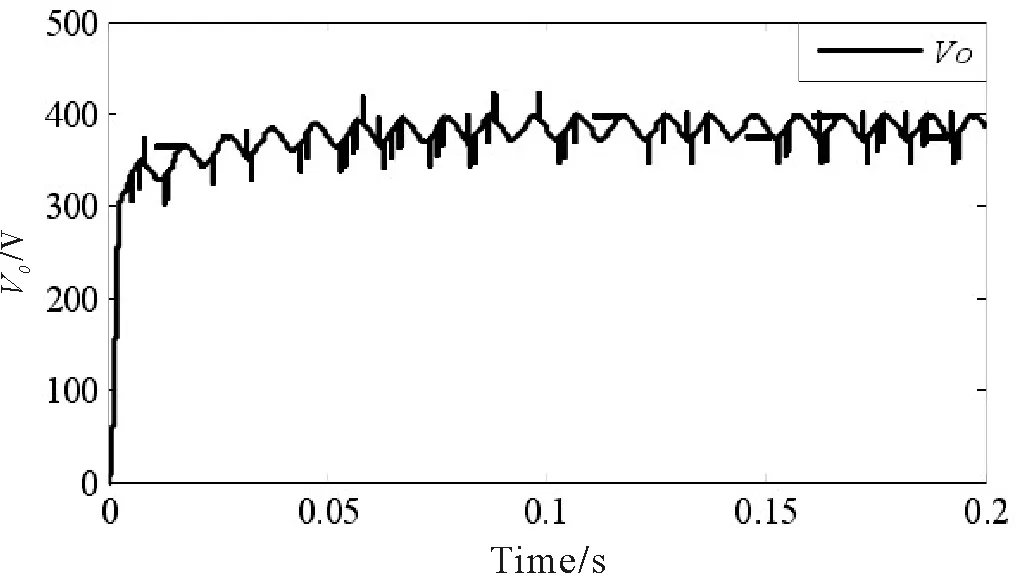
圖12 測試參數變化時MFPC下的V0
4 結語
針對常用PFC AC/DC變換器控制存在的缺陷,提出了車載充電機 PFC AC/DC變換器的MFPC研究,實驗、仿真結果表明,該方法不僅結構簡單,且在變α下MFPC的PFC AC/DC 變換器的電流諧波失真值僅為1.21%,參數變化時,V0在0.035 s左右的時間可以從327 V平穩到達385 V,具有更好的動態性、更高的功率因數和更強的魯棒性,完全滿足對新能源汽車低碳減排的需要.
參考文獻:
[1] 劉紅麗,馬正來,聶 鵬.4KW電動汽車車載充電機的研究與實現[J].電氣傳動,2017,47(2):20-13.
[2] Musavi F,Craciun M,Gautam D S,et al.An LLC Resonant DC-DC Converter for Wide Output Voltage Battery Charging Applications[J].IEEE Trans.Power ELectron, 2013, 28(12):5 437-5 445.
[3] 曹靈靈.車載充電機 PFC AC/DC變換器的高性能控制[D].合肥:合肥工業大學,2017.
[4] 郭曉丹,李曉輝,李 磊,等.300KW非車載充電機現場檢定系統的設計[J].電測與儀表,2017,54(8):123-128.
[5] 黃菊花,何劍平,曹 銘.電動汽車電池管理系統抗工頻磁場設計[J].電測與儀表,2016,42(7):80-82.
[6] 胡 勇.電動汽車交流充電樁控制裝置的研究與設計[D].綿陽:西南科技大學,2017.
[7] 杜常清,潘志強,趙奕凡,等.電動汽車車載充電系統研究[J].電源技術,2016,40(6):1 277-1 279.
[8] 陳小虎,陳息坤.新型混合動力電動汽車車載充電機的研究[J].電氣自動化,2015,37(6):21-25.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19