無人機航路規劃評估
2018-05-04 04:38:38劉聰鋒西安電子科技大學陜西西安7007解放軍63893部隊河南洛陽47003
艦船電子對抗 2018年1期
關鍵詞:評價
葛 聲,劉聰鋒,蔡 嘯(.西安電子科技大學,陜西 西安 7007;.解放軍63893部隊,河南 洛陽 47003)
0 引 言
無人機(UAV)是無人駕駛飛行器的簡稱。它以低成本、不易被捕獲、損傷較小、可長時間巡航飛行等優點,在現代戰場的高危險任務中扮演著極其重要的角色[1-2]。無人機執行攻擊任務時,把敵方防御區域內的某一點作為起始點,把所要摧毀的目標所在位置作為目標點。通過航路規劃,尋找無人機從起點到目標點過程中既滿足機動性能又能實現任務目標的最優或次優航路[3]。
一般來說,對于自動尋優,得到的最優航路是根據代價函數確定的最優航路。但是根據不同指標得到的最優航路會有很多,仍需要從得到的備選航路中進行選擇,尤其是在作戰環境不完全確定情況下執行任務,需要在執行任務前規劃出多條航路,供無人機在執行任務時根據具體情況進行選擇。在對抗的戰爭環境中,航路評估的實時性很有可能是決定戰局的關鍵因素。在航路評價中,需要考慮航路性能的各種因素,對各項指標進行量化和計算,確定影響航路綜合性能的指標權重,完成綜合指標的計算。航路評價一般關注的主要因素包括航路穩定性、航路安全性、航路任務約束、航路任務完成。
因此無人機航路規劃是一個多準則問題,針對無人機航路評估指標眾多的問題,本文采取模糊綜合評價[4-7]法對無人機的航路進行評估。
1 航路評估指標體系建立
1.1 航路的穩定性
(1) 最小平飛距離
無人機在調整飛行姿態前,必須直飛的距離用L表示,則任意一段航跡的長度,都不小于L:
li≥L,i=1,2,…,n
(1)
(2) 最大轉彎角
無人機轉彎時能轉過的最大角度即最大轉彎角,如圖1所示。

圖1 航跡最大轉彎角
(3) 最小轉彎半徑
在無人機的轉彎飛行過程中,無人機需要通過在一定時間內調整方向從而實現轉彎飛行。假設已知無人機第i段航跡的曲線方程為y=f(x),xi≤x≤xi+1,無人機的實際飛行要求的最小轉彎半徑為rmin,則根據曲線曲率計算公式:
(2)
可得第i段航跡各點處的轉彎半徑r=1/κ,故只要采用上述方法求得的航跡各點處的轉彎半徑均滿足1/κ≥rmin,便可確定航跡能夠滿足該約束條件。
(4) 最大爬升/俯仰角
無人機在高度方向上的升降將會受到自身機動性能的約束。假設最大爬升/俯沖角為θmax,則第i段航跡的爬升/俯沖角可通過水平投影寫成:
(3)
式中:ai+1=(xi+1-xi,yi+1-yi)。
(5) 航跡總長度
航跡總長度是指無人機從起始位置點到規定目標點需要飛過的最大空間距離。無人機最大能達到的航跡長度為Lmax,則該約束可寫成:
L≤Lmax
(4)
1.2 航路的安全性
(1) 被摧毀的概率:無人機在對抗環境中被擊中的概率。
(2) 撞地概率:無人機在執行任務過程中與地面撞擊的概率。
(3) 禁飛區避開率:無人機在執行任務過程中避開遇到各種威脅的概率。
(4) 穿越威脅區時間:無人機在威脅區飛行的時間。
(5) 突防概率:無人機突破地方武力威脅攻擊的概率。
1.3 航路的任務約束
(1) 航路總長度:任務要求無人機帶裝備和燃料,那么對無人機的飛行總長度會有要求。
(2) 目標進入方向:無人機在執行攻擊任務過程中,從某個方向進攻會有更大的打擊力。
(3) 禁飛區避開率:無人機在執行任務過程中避開遇到各種威脅的概率。
1.4 航路的任務完成
(1) 持續攻擊力:無人機持續攻擊的能力。
(2) 攻擊范圍:無人機對地方目標打擊的范圍。
(3) 防空武器攻擊力:無人機對防空武器的打擊能力。
(4) 命中精度:無人機擊中地方目標的能力。
(5) 協同攻擊力:無人機和其它無人機或者武器協同攻擊的能力。
2 模糊綜合評價航路評估
通過上一節的分析,航路優劣不能簡單靠綜合代價來判斷,因為無人機還受到自身物理條件的約束,航路的代價小但是航路不一定是最優的,因為如果航路的轉彎比較多,轉彎角比較大,就會對航路的穩定性影響很大,并且不同航路離威脅區的遠近也是不相同的。航路點數的不同也會在一定程度上影響到航路的優劣。因此航路規劃是一個多因素決策問題。本文選擇模糊綜合法對無人機航路進行評估。
首先建立無人機的航路評價指標體系,如圖2所示。
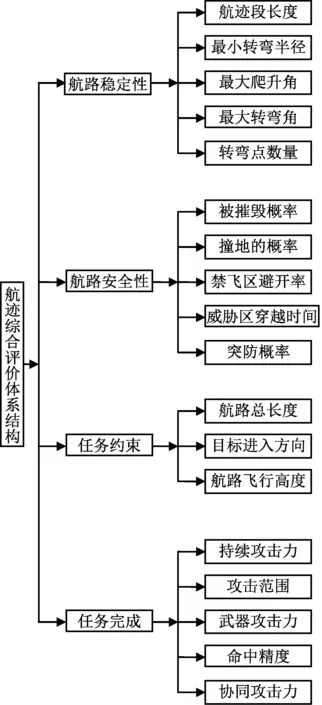
圖2 航跡決策層次結構模型
針對無人機航跡評價指標的相對性和模糊性,采用模糊數學的理論和方法對無人機攻擊航路進行評價。模糊數學可有效解決航跡評價中定性信息的處理。所謂綜合評估,是指通過影響事物的多種因素進行總的評價,如果評價過程中采用模糊數學的方法,便是模糊綜合評價法。多無人機協同定位航跡規劃中影響航跡的因素眾多。
模糊綜合評價法的步驟如下:
(1) 確定評估對象和評估指標集
本文要評估的對象是無人機攻擊航路的優劣, 一級指標包含航路的穩定性、安全性、任務約束、任務完成4個因素,建立因素集如下式:
U={U1,U2,U3,U4}
(5)
二級指標總共包含4個指標,航路的穩定性包括:最小轉彎半徑、最大轉彎角、最大爬升角、轉彎點的數量、航跡段的長度共5個因素;航路的安全性包括被摧毀的概率、撞地的概率、禁飛區的避開率和穿越威脅區的時間和突防概率共5個因素;航路的任務約束包括飛行的時間、目標進入方向、飛行的高度3個因素;任務的完成包括持續攻擊的能力、 攻擊范圍、 防空火力攻擊率、命中的精度和協同攻擊能力5個因素。建立因素集如下:
U1={U11,U12,U13,U14,U15}
(6)
U2={U21,U22,U23,U24,U25}
(7)
U3={U31,U32,U33}
(8)
U4={U41,U42,U43,U44,U45}
(9)
(2) 建立評價集
根據評估標準和等級,綜合考慮專家和工程師關于定性指標和定量指標的意見來確定評價集:
V={v1,v2,…,vm}
(10)
評價集V由不同的航路等級組成,其中m代表評價集中航路級別的個數。根據航路評價的指標,可以把航路優劣分為分為優、良、中、差和很差5級,集合中的元素可以是定性的,也可以是量化的分值。評價等級分得越詳細,評價就相對越準確,但操作起來就會比較麻煩。每一種評價都可看成一種模糊向量,優、良、中、差和很差對應1,0.85,0.75,0.7,0.6,那么航路評價集表示為:
V= {v1,v2,…vm}=
{0.6,0.7,0.0.75,0.0.85,1}
(11)
(3) 層次分析法(AHP)確定指數權重
根據多準則決策(MCDM)問題的總體目標和特點,復雜的權重被分解,并構建為自下而上的層次結構,包括目標層、準則層和指標層。本文中,航路評估指標體系包含4個一級航路評估指標和18個二級航路評估指標。
建立評價指標體系后采用AHP方法確定指標權重,可以計算指標層指標的局部權重:
WL={ωL1,ωL2,…,ωLn}
(12)

(4) 建立模糊關系隸屬度矩陣R
如果對討論范圍U的任意一個元素x,都有一個數B(x)∈(0,1)和它對應,則稱B為U上的模糊集,B(x)為x對B的隸屬度。當x在U中變動時,B(x) 就是1個函數,稱為B的隸屬函數。模糊等級的中間區域不僅要有穩定的隸屬度,還要表現出細微的差別,因此要選取合適的隸屬度函數。根據調查問卷的統計結果,采用基于頻率法和加權平均法的某種數學方法,可以計算出一級模糊關系矩陣如下:
(13)
式中:rij為評價集V中第i個指標第j個等級的隸屬度,i=1,2,…,n,j=1,2,…,m,n是指標的數量,m是評價集合中航路等級的個數。
模糊關系矩陣中的不同行反映了評估對象不同評價指標的每個等級的模糊集合的不同隸屬度。采用基于頻率的方法建立模糊關系矩陣,其原理是判斷“優”“良”“中”“差”“很差”的專家和工程師的數量占評價改因素的所有人的比例,分別為該集合的評估指標的隸屬集。
令rij=(fij1,fij2,…,fijm),其中fijm表示二級指標第ij個指標因子相對于評語集V={v1,v2,…,vm}中評語為vm的隸屬度,則:
(14)
式中:Nijm為第ij個指標選擇評語vm的人數;N為參加評估專家的總人數;m=1,2,…,m。
(5) 選擇模糊算子, 計算各級模糊綜合矩陣
B=W°R作為模糊綜合評估的基本模型,其中“°”稱作合成算子,很大地影響著綜合矩陣B,所以選擇正確的合成算子對最終的評估結果起著至關重要的作用。
M(·,⊕)算子的計算公式為:
(15)
用局部權重WL合成一級模糊關系矩陣R,可以獲得隸屬矩陣,稱為第一級模糊綜合評價矩陣:
Bi=WL°R=(bi1,bi2,…,bim)
(16)
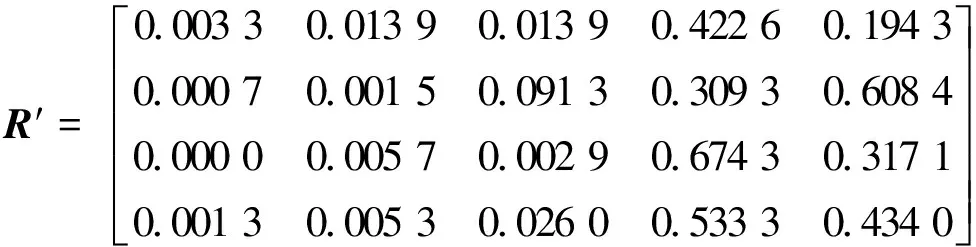
由于評價指標體系的層次結構,需要計算二級模糊關系矩陣:
(17)
然后,結合權重矩陣,二級模糊綜合評價矩陣可以計算如下:
B=W°R′=(b1,b2,…,bm)
(18)
式中:bm為評價集中第m個等級的隸屬度。
(6) 確定航路的優劣級別
根據隸屬度最大原則,bi0=maxbi(1≤i≤m),可以判斷評估對象屬于i0個級別。
3 模糊綜合評價法的仿真驗證
為了驗證模糊綜合評價法評價無人機航跡的合理性,在一定型號的無人機執行某種特定任務的條件下,選取規劃出來的航跡,以上一節的航路評估指標體系為評估指標集進行仿真實驗驗證。
(1) 構建權重判斷矩陣并求出局部權重和全局權重
航路的準則層包括航路的穩定性、航路的安全性、航路的任務約束、任務完成4個因素,依次用U1,U2,U3,U4表示。
航路綜合評價準則層的權重判斷表如表1所示。
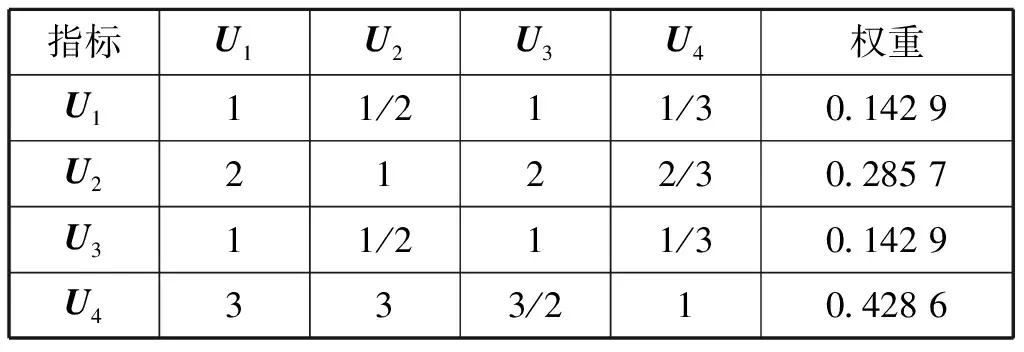
表1 航路綜合評價第2層次的權重判斷表
表1中一致性比例Rc=0<0.1。
航路的穩定性包括最小轉彎半徑、最大轉彎角、最大爬升角、轉彎點的數量、航跡段的長度5個因素,依次用U11,U12,U13,U14,U15表示。
航路穩定性指標權重判斷表如表2所示。

表2 航路穩定性權重判斷表
表2中一致性比例Rc=0.013 1<0.1。
航路的安全性包括被摧毀的概率、撞地的概率、禁飛區的避開率和穿越威脅區的時間和突防概率5個因素,依次用U21,U22,U23,U24,U25表示。航路穩定性指標權重判斷表如表3所示。

表3 航路安全性權重判斷表
表3中一致性比例Rc=0.013 1<0.1。
航路的任務參數約束包括航路的總長度、目標進入方向、飛行高度3個因素,依次用U31,U32,U33表示,如表4所示。
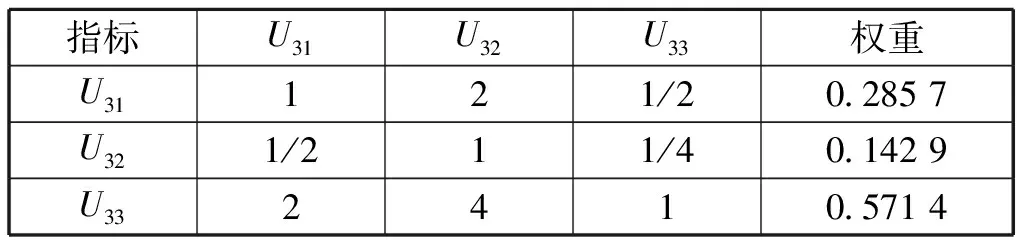
表4 航路任務約束權重判斷表
表4中一致性比例Rc=0<0.1。
航路的任務完成包括持續攻擊能力、 攻擊范圍、 防空火力攻擊率、命中的度和協同攻擊能力5個因素,依次用U41,U42,U43,U44,U45表示,如表5所示。
利用AHP方法計算出了準則層的權重和指標層在各個相應準則的局部權重。各個指標的全局權重如表6所示。
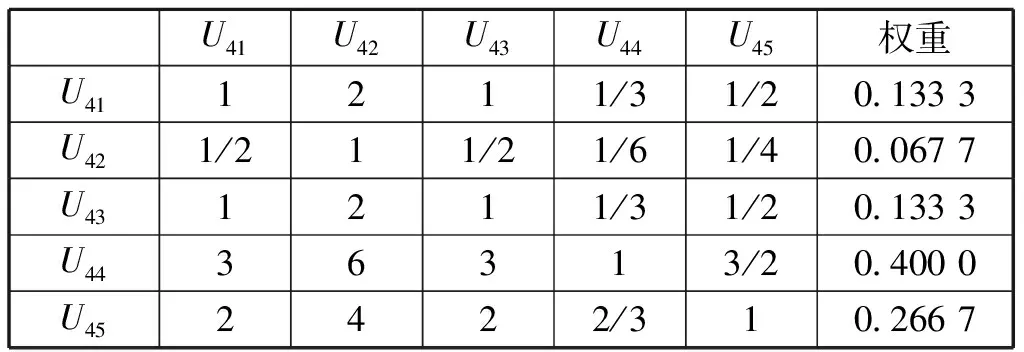
表5 航路安全性權重判斷表
表5中一致性比例Rc=0<0.1。

表6 航路指標全局權重
航路各個準則層在相應層中的指標權重如圖3所示。
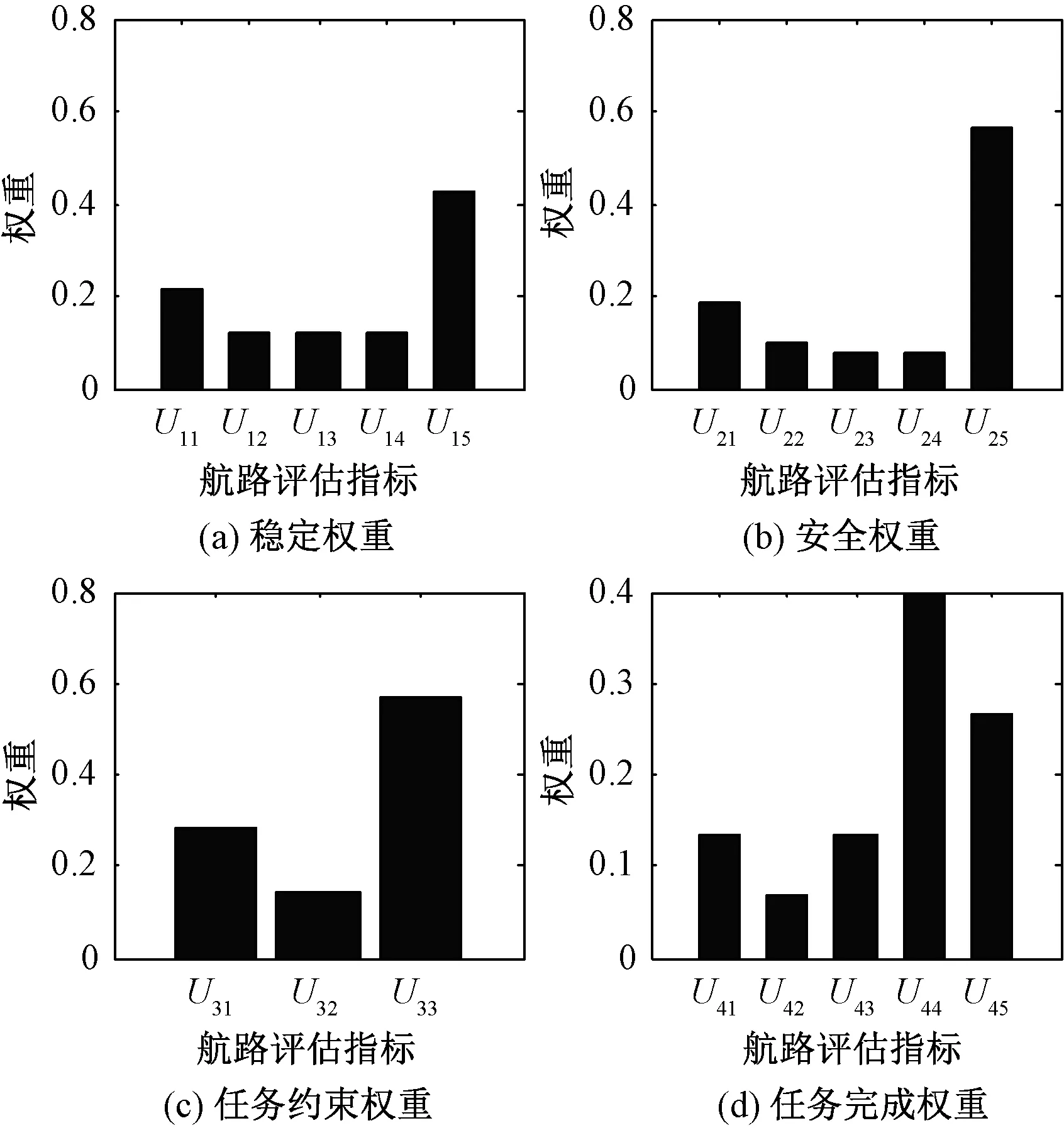
圖3 航路各準則層指標權重圖
通過上面的仿真圖可以看出影響航路層的指標在各自所在準則層中的權重大小,可以得出它們的相對重要性,也是后面進行模糊綜合評價的基礎。
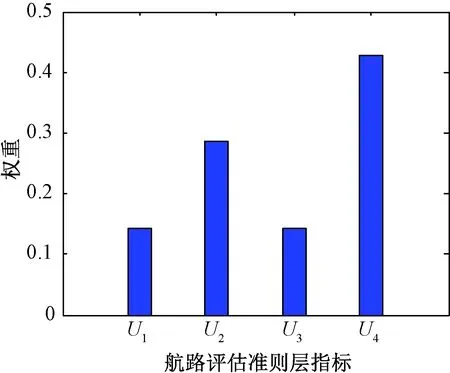
圖4 航路各準則層指標權重圖

圖5 航路指標全局權重圖
圖4顯示了準則層各航路評估指標的權重和各個航路指標在整個評估指標體系中的權重,可以看出各個準則層航路指標的相對重要關系,以及各個指標在整個評估過程中的重要性。
(2) 建立模糊關系隸屬度矩陣
結合相關專家和工程師對某條航路各個指標的評價可以得到第一級模糊隸屬度矩陣:
用同樣方法可以計算出:
B2=(0.000 70.001 50.091 30.309 30.608 4)
B3=(0.000 00.005 70.002 90.674 30.317 1)
B4=(0.001 30.005 30.026 00.533 30.434 0)
這樣可以得到二級模糊矩陣:
B=(0.001 30.005 50.046 40.473 60.475 8)
T1=B°VT=0.917 7
航路的優劣的結果顯示:b5=maxbi(i=1,2,…,5),航路的優劣等級為“優”。通過相同的步驟可以求出其它5條航路航跡的評分值分別為:T2=0.654 4,T3=0.782 9,T4=0.923 0,T5=0.934 4,T6=0.801 2。
同時,以百分數形式對準則層層面的航路指標評估結果進行評估,可以幫助無人機航路規劃人員對航路進行有效分析,給出航路進行改進的意見,進而規劃出性能更好的航路。假設此時的評價集V1=(10,30,50,70,90),準則層中每個指標的百分數值的計算如下:
(19)
經過計算可得:S1=77.572 5,S2=81.025 9,S3=76.057 1,S4=77.866 7。
通過對所選的6條航路進行評估,評估結果如圖6所示。
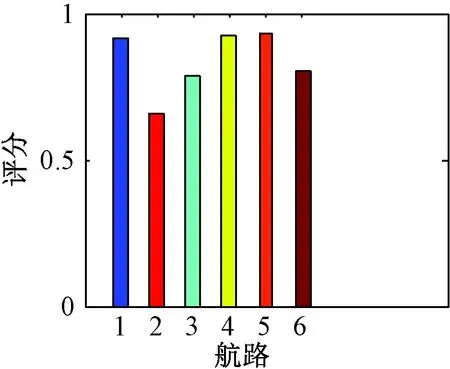
圖6 航路評估結果
第1,4,5條航路的優劣等級為優,那么其余3條航路就可以不予考慮。根據具體的攻擊任務分析,威力從1,4,5 3條航路中選擇1條更有利于執行攻擊任務的航路,可以對1,4,5 3條航路進行準則層層面的評分分析。比如說對航路1進行準則層層面分析,分析結果如圖7所示。

圖7 航路1準則層評估
航路的穩定性和任務完成質量評分比較高。航路穩定性和航路任務約束評分較低,那么繼續優化航路時可以重點考慮對穩定性和任務約束的各個指標進行分析。針對具體的作戰環境和具體的作戰任務做出相應的改進措施,比如說可以對轉彎點的數量、飛機飛行的高度等做出相應的分析,并實施相應的改進措施,使規劃出來的航路更具可飛行性。通過模糊綜合評價法的分析能夠甄別出航路的優劣。通過對航路準則層層面的分析可以對航路做更具體的分析,能夠對航路規劃做出針對性的改進,節省了大量的資源與精力。
4 結束語
航路規劃只選擇了某些因素作為代價函數,然而航路評估是一個多準則決策問題,涉及到航路穩定性、航路安全性、航路任務約束和航路任務完成等因素。本文建立了完整、客觀的航路評價指標體系,通過層次分析法獲得個各指標的權重,然后利用模糊數學綜合評價模型來對無人機航路的優劣進行綜合評價。仿真實驗證明了模糊綜合評價法對航路的評價是有效的,并且能對航路優劣做詳細的分析,對航路的優化提出了有效建議。
[1] 魏瑞軒,李學仁.無人機系統及作戰使用[M].北京:國防工業出版社,2009.
[2] 沈文亮,張卓鴻.無人機在電子對抗中的應用研究[J].艦船電子對抗,2013,36(4):14-18.
[3] GILMORE J F.Automamous vehicle planning analysis methodology[C]∥The Proceedings of Association for Unmanned Vehicles Systems Conference.Washington,D.C.,1991:503-509.
[4] ZHAO H,GUO S.Risk evaluation on UHV power transmission construction project based on AHP and FCE method[J].Mathematical Problems in Engineering,2014(1):1-14.
[5] 吳萬鐸,吳萬鈳.模糊數學與計算機應用[M].北京:電子工業出版社,1988.
[6] 謝麗娟.模糊綜合評判中合成算子的選取[J].科協論壇,2012(9):103-104.
[7] 朱振強.飛行器航路規劃與評價研究[D].西安:西安電子科技大學,2014.
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
現代檢驗醫學雜志(2016年3期)2016-11-15 01:59:56
中學語文(2015年21期)2015-03-01 03:52:11
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
西南軍醫(2015年1期)2015-01-22 09:08:16
中國音樂教育(2014年9期)2014-05-20 10:26:24
治淮(2013年1期)2013-03-11 20:05:18
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51